

Министерство образования Российской Федерации
РЫБИНСКАЯ ГОСУДАРСТВЕННАЯ АВИАЦИОННАЯ ТЕХНОЛОГИЧЕСКАЯ
АКАДЕМИЯ им. П. А. СОЛОВЬЕВА
Методические указания по проведению
Лабораторной работы
«Исследование бесконтактного двигателя постоянного тока»
Под редакцией к.т.н.,
доцента Микульского Н.Н.
ЛАБОРАТОРНАЯ РАБОТА
Исследование бесконтактного двигателя постоянного тока
1.Цель работы
Изучение конструкции и способов регулирования угловой скорости вращения, бесконтактного двигателя постоянного тока с транзисторным коммутатором и регулятором частоты в разомкнутых и замкнутых системах регулирования.
2. Приборы и оборудование
Лабораторный стенд СБДПТ-1 в составе приборного блока электромеханического агрегата на базе бесконтактного двигателя постоянного тока ДБ—60—60—4—А с синхронным тахогенератором и электромагнитного тормоза с моментомером. Дополнительно необходимы цифровой прибор Щ4313 и двухлучевой осциллограф типа С1-65.
3. Основные технические данные двигателя ДБ—60—60—4—А
Номинальное напряжение питания 27
Воминальная мощность 60Вт
Номинальная угловая скорость
вращения, рад/с (об/мин) 419 (4000)
Номинальный вращающий момент О,144 Нм
Режим работы S1,S2,S3
Кратность пускового момента 2,5
Электромеханическая постоянная времени 0,005 с
Коэффициент полезного действия 63%
Момент инерции ротора 1,18*10-5кг*м2
Коэффициент передачи тахогенератора ктг 7,4*10-3/(рад/с)
Минимальная наработка двигателя при
работе ротора в газовой среде 10000 часов
при работе ротора в жидкости 4000 часов
Минимальный срок службы 12 лет
Минимальный срок сохраняемости
в отапливаемом хранилище 12 лет
Двигатель выдерживает:
повышение атмосферного давления,
не выше 297 кПа (3 атм)
понижение атмосферного давления,
не ниже 0,666 Па (5 мм рт.ст.)
многократные механические удары с
амплитудой ускорения, не более 392 м/с2
повышение предельной температуры
среды, не выше +70°С
понижение предельной температуры
среды, не ниже -60°С
4. Теоретическая часть
Широка распространенные в автоматизированных электроприводах коллекторные двигатели постоянного тока характеризуются невысоким ресурсом работы из-за наличия щеточно-коллекторного узла, высоким уровнем радиопомех и необходимостью частого проведения регламентных работ по замене щеток.
Указанные недостатки обусловили появление бесконтактных двигателей постоянного тока, в которых роль щеточно-коллекторного узла выполняется транзисторным коммутатором, управляемым датчиками положения.
Характерными особенностями бесконтактных двигателей постоянного тока [1] являются:
- наличие силовом обмотки якоря, расположенной на статоре, и состоящей из нескольких катушек, сдвинутых относительно друг друга в пространстве (одна катушка соответствует фазной обмотке синхронного двигателя) и ротора, выполненного из магнитотвердого материала;
- наличие бесконтактных датчиков положения оси магнитного потока ротора по отношению к осям силовой обмотки статора (трансформаторных, индукционных,, фотоэлектрическик, на элементах Холла и т.д.);
- наличие бесконтактного, чаще всего транзисторного, коммутатора, осуществляющего коммутацию катушек силовой обмотки статора по сигналам с датчиков положения.
Эти три фактора позволяют при устранении скользящего контакта коллектор-щетки сохранить основную особенность машины постоянного тока по сравнению с машиной переменного тока - частота переключения катушек обмотки якоря определяется угловой скоростью ротора, т.е. регулируется самой машиной. Благодаря этому бесконтактный двигатель постоянного тока в основном сохраняет характеристики коллекторного двигателя с независимым возбуждением.
Регулирование угловой скорости вращения
Как и у обычного двигателя постоянного тока скорость вращения бесконтактного двигателя постоянного тока может регулироваться изменением напряжения питания и введением добавочного сопротивления в цепь якоря.
Регулирование скорости вращения изменением напряжения на якоре двигателя
Механические характеристики бесконтактного двигателя при изменении напряжения питающего якорь приведены на рис.1. Как видно это семейство параллельных прямым.
Таким способом скорость вращения можно регулировать только вниз от основной, соответствующей естественной механической характеристике.
Регулирование скорости вращения введением добавочного со противления в якорную цепь
При введении добавочного сопротивлений в цепь якоря (рис.2) скорость холостого кода не изменяется, но с увеличением величины сопротивления жесткость характеристик падает.
Диапазон регулирования скорости при этом способе весьма незначителен и, как правило, не превышает 1.5:1.
Конструкция бесконтактного двигателя постоянного тока ДБ—60—60—4—А
Обмотка возбуждения
Статор двигателя представляет собой неявнополюсную конструкцию с 8 пазами в которые укладывается обмотка возбуждения (рис.3) из четырех секций Н1, К2 и НЗ, К4, а также тахообмотка Н5, К5.
Число пар полюсов секции р=2.
Каждая секция, например Н1, К1 состоит на четырех катушек соединенных последовательно (рис.4) и укладываемых в статор.
На рис.5 представлен статор двигателя с уложенной, для примера, в его пазы секцией Н1, К1.
Необходимо отметить, что в те же пазы 1, 3, 5, 7 (рис.6) укладывается абсолютно также еще одна обмотка К2, Н2 (как это следует из (рис.6), а так как она может записываться только с конца К2, а не с начала Н2, то при ее подключении к однополярному источнику питания направление потока возбуждения (при предварительном обесточивании секции Н1, К1) изменится на противоположное, т.е. под пазом №2 будет уже южный полюс S, а не северный.
Такое ухищрение обуславливается только тем, что питание обмоток однополярное.
Секции Н1, К1 и Н2, К2 имеют магнитную связь, поэтому в них взаимно наводится ЭДС трансформации (коэффициент трансформации обмоток равен единице). Указанное обстоятельство обуславливает то, что осциллограмма напряжения, например, на секции Н1, К1 имеет знакопеременную форму.
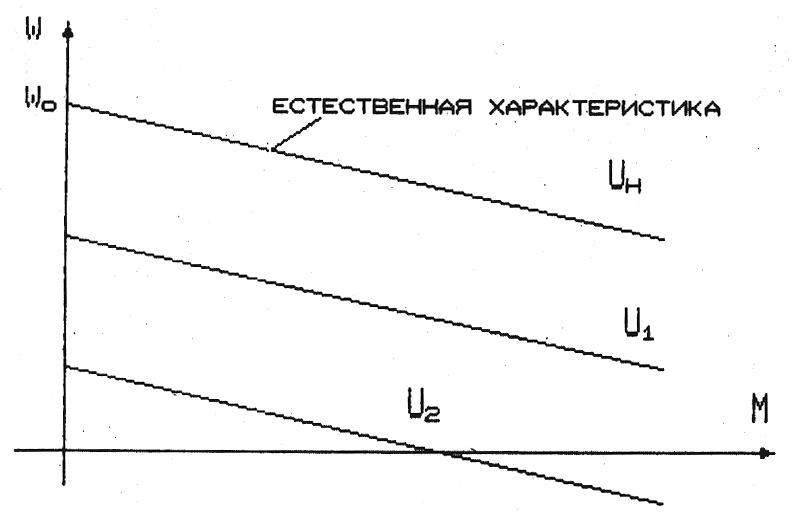
Рис.1. Механические характеристики бесконтактного двигателя постоянного тока при различных напряжениях питания Uн > U1 > U2
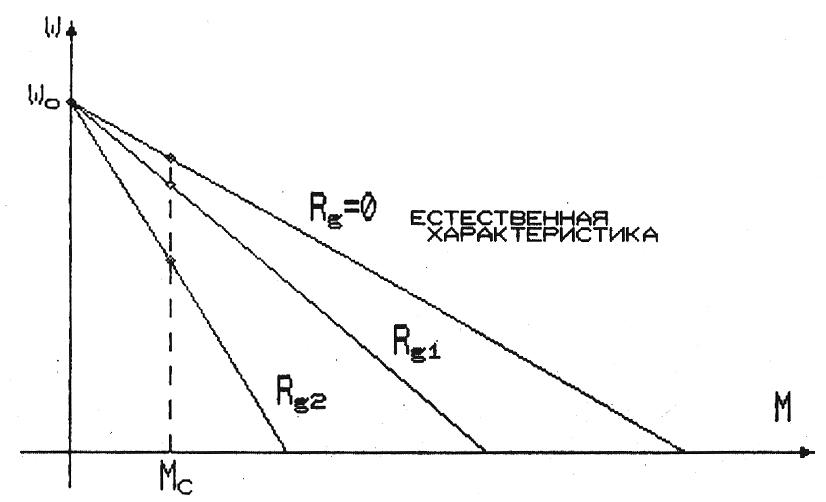
Рис.2. Механически характеристики при реостатном регулировании скорости вращения бесконтактного двигателя постоянного тока (Rg2 > Rg1 > Rg =0)
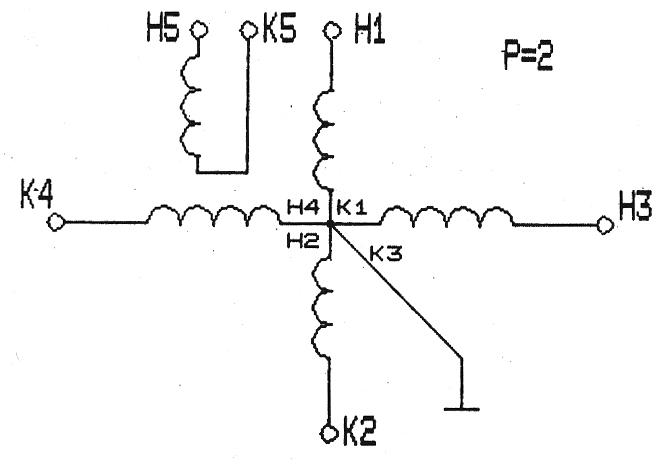
Рис.3. Принципиальная схема обмотки возбуждения, состоящей из 4 секций; Н1, К1; Н3, К3; Н2, К2; Н4, К4. Н5, К5 – тахообработка.
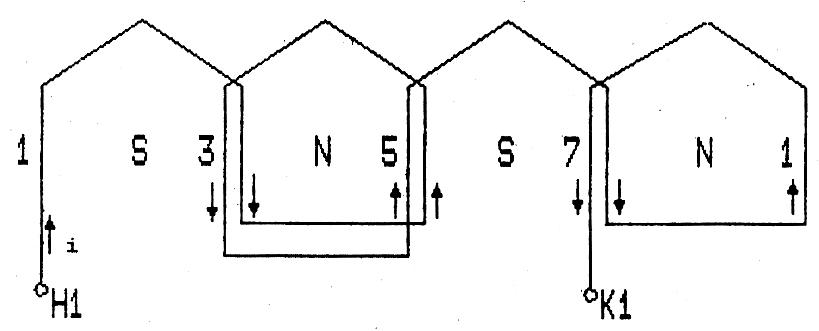
Рис.4. Схема соединения катушек каждой секции для получения четырех полюсов (Р=2)
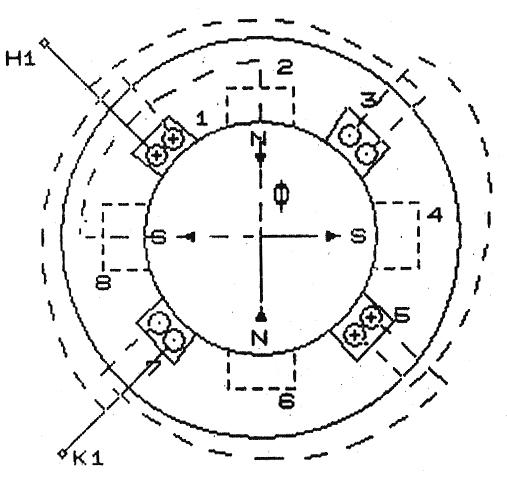
Рис.5. Статор с уложенной секцией Н1, К1 в пазы NN: 1;3;5;7.

Рис.6. Паз N1 с размещенными в нем секциями Н1,К1 и Н2,К2
В полной аналогии секциям Н1, К1 и Н2, К2, но только в пазы № 2; 4; 6; 8 укладываются секции НЗ, КЗ и Н4, К4.
Ротор двигателя
Ротор двигателя выполнен в виде звездочки с четырьмя полисами (р=2). Поперечное сечение двигателя представленно на рис.7.
Датчики положения
В двигателе ДК-60-60-4-А в качестве датчиков положения испопьуются два датчика Холла, которые представляют собой полупроводниковые (кремниевые) пластины размером З*6*0,15 мм3. К торцам (с размером 3 мм) припаяны выводы, называемые "токовыми" , через которые датчики подключаются к источнику питания.
При подаче на токовые выводы напряжения питания по кремниевой пластине протекает ток. При воздействии на датчик магнитного поля с нормальной к плоскости датчика Холла составляющей индукции в теле датчика возникает поперечное электрическое попе, которое характеризуется разностью потенциалов на холловских выводах; датчика ЭДС Холла), пропорциональной произведению индукции магнитного поля и тока питания.
При изменении направлении индукции или тока питания меняется и знак ЭДС Холла.
Как видно из рис.7 в двигателе ДБ-60-60-4-А два датчика Холла, расположенные непосредственна в рабочем зазоре магнитной системы , вырабатывают на вы коде напряжение, величиной и знаком соответствующее величине и знаку магнитной индукции поля, создаваемого ротором-индуктором. Датчики располагают соосно осям секций обмотки статора и; таким образом, они имеют относительно друг друга сдвиг в расточке статора на 90 или 270 электрических градусов. В данном двигателе сдвиг равен 270 электрическим или 135 пространственным градусам.
Каждый датчик X1 или Х2 управляет коммутацией двух секций обмотки якоря:
датчик X1 - коммутацией секций Н1, К1 и КЗ, Н2;
датчик Х2 - коммутацией секций Н3, К3 и К4, Н4.
Токовые выводы обоих датчиков подключаются паралельно.
Отрицательный потенциал например на датчике X1 вызывает включение секции Н1, К1 и отключение секции К2, Н2. Важно отметить, что эти встречно-параллельные секции работают строго в противофазе.
Знак ЗДС Холла на каждом из датчиков зависит от того какой полюс ротора накопится под ним S или N. Соответственно будет включаться или отключаться в противофазе секции Н1, К1 - К2, Н2 в зависимости от знака сигнала с датчика X1 и Н3, К3 - К4, Н4 в зависимости от знака сигнала с датчика Х2. В промышленности датчики Холла широко применяются как в качестве датчиков положения, так и для измерения величины магнитной индукции. Однако их существенным недостатком является

Рис.7. Сечение четырехсекционного бесконтактного электродвигателя с Р=2. Здесь Х1, Х2 – датчики Холла.
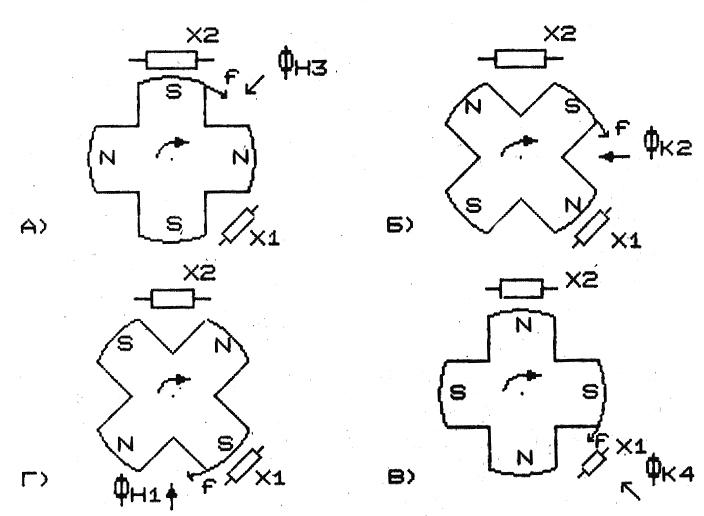
Рис.8. Пример для пояснения принципа действия бесконтактного двигателя постоянного тока.
значительная термочувствительность, для компенсации которой датчики приходится термостатировать.
Принцип действия бесконтактного двигателя
Бесконтактный двигатель состоит ив трёх частей; собственно двигателя; датчиков положения и полупроводникового коммутатора.
Назначение полупроводникового коммутатора заключается в коммутации секции обмотки возбуждения по сигналам с датчиков положения.
Рассмотрим установившийся режим работы с постоянной угловой скоростью вращения с положения, изображенного на рис.8а. Здесь под датчиком Х2 находится южный полюс S. На холловском выходе при этом, допустим, создается положительный потенциал, который посредством коммутатора подключает секцию Н3, К3 и отключает секцию К4, Н4. Магнитодвижущая сипа секции НЗ, КЗ развивает магнитный поток, обозначенный на рис,8а как Фн3 (примечание: для облегчения восприятия изображен поток лишь под одним из полюсов, хотя их четыре). Взаимодействие потока Фн3 с полюсом s ротора создает вращающий момент, поворачивающий ротор по часовой стрелке. В положении рис.8б под датчиком X1 располагается северный полюс N ротора. При этом отрицательный потенциал датчика X1 подключает секцию К2, Н2 (секция Н1, К1 отключена). Взаимодействие потока этой секции Фн3 с полюсом s ротора развивает вращающий момент, также поворачивающий ротор по часовой стрелке. В положении рис.8в под датчиком Х2 располагается северный полюс N ротора и отрицательный потенциал с него подключает секцию К4, Н4 (секция НЗ, КЗ отключена). Ротор под действием потока ФК2 продолжает дальнейшее вращение по часовой стрелке. В положении рис.8г под датчиком X1 располагается южный полюс ротора при этом положительным сигналом с датчика X1 подключается секция Н1, К1 и так далее.
Реально угол включения каждой секции составляет 120 электрические градусов или 60 пространственных градусов.
Замкнутая система стабилизации скорости вращения с отрицательной обратной связью по скорости вращения
Для увеличения диапазона регулирования скорости вращения в автоматизированном электроприводе используют, как правило, замкнутые системы стабилизации скорости вращения.
Системы стабилизации могут использовать различные обратные связи, например, положительную по току якоря, отрицательную по напряжению и отрицательную по скорости вращения. В данном стенде для стабилизации скорости вращения используется релейная отрицательная обратная связь по скорости вращения.
В качестве датчика скорости используется тахообмотка Н5, К5 уложенная в пазы статора и в которой наводится ЭДС вращения.
Регулятор скорости
Регулятор скорости своим выходным транзистором замыкает и размыкает цепи питания датчиков Холла двигателя. При замкнутой цепи датчиков двигатель развивает вращающий момент в соответствий со своей естественной механической характеристикой. При размыкании цепи датчиков Холла двигатель совершает свободный выбег. Суммарный за период коммутации вращающий момент двигателя определяется соотношением времени замыкания цепи и периода коммутации. Выходной транзистор регулятора скорости управляется органом сравнения, в котором сравниваются величины напряжения управления и выпрямленного напряжения, с тахообмотки двигателя, величина которого пропорциональна его частоте вращения.
При превышении величины управляющего напряжения над величиной напряжении, с тахообмотки, орган сравнения открывает выгодной транзистор, что соответствует включению двигателя и увеличению его угловой скорости вращений. Рост частоты вращения происходит до тех пор, пока величина напряжения с тахообмотки не превысит величину управляющего напряжения, и орган сравнения не закроет выгодно и транзистор и двигатель перейдет в режим свободного выбега. Таким образом, стабилизируется частота вращения двигателя на уровне, соответствующем величине управляющего напряжения.
Такая система стабилизации скорости называется релейной.
Тахообмотка
Используемая в качестве звена обратной связи по скорости вращения тахообмотка расположена непосредственно в пазах статорного пакета вместе с силовой обмоткой. В силу наличия взаимоиндуктивности этих обмоток на выходе тахообмотки присутствует кроме ЭДС-вращения и ЭДС-взаимоиндукции, возникающее при коммутации силовой обмотки транзисторными ключами коммутатора, что является источником погрешности при поддержании линейной зависимости частоты вращения от величины управляющего напряжения.
Трогание двигателя
Наличие в электродвигателе, значительных магнитных зубцовых моментов увеличивает момент трогания. С учетом этих двух факторов, в отдельных угловых положениях ротора трогание двигателя ДБ-60-60-4-А происходит при величине напряжения управления (в замкнутой системе) более 2,5 В. После трогания двигатель сохраняет вращение при значительно меньших величинах управляющего напряжения (порядка О,5 В).
5. Описание лабораторного стенда СБДПТ – 1
Стенд состоит из приборного блока и электромеханической части, которые соединяются между собой тремя кабелями через разЪемы на парадней панели стенда. Электромеханическая часть состоит из электродвигателя ДБ-60-60-4-А и электромагнитного тормоза, запитываемого от источника постоянного тока. Сопротивление обмотки возбуждения тормоза R=80 Ом.
Перевод обозначений на панели
POWER
CONTROL VOLTAGE
ARMATURE VOLTAGE
ARMATURE CURRENT
VELОSITY FEEDBACK
SPEED CОNTRОL
VOLTAGE STEP CONTROL
ARMATURE CIRCUIT RESISTANCE
LOAD CONTROL
PULSE DISTRIBUTOR
CURRENT SOURCE
SENSOR SIGNAL INPUT
EMB
E.BRAKE
TGW
DC MOTOR
TRANSISTOR SWITCHED
DC MOTOR
VELOCITY CONTROLLED SYSTEM
энергия
управляющее напряжение
напряжение якоря
ток якоря
обратная связь по скорости
задатчик скорости
ступенчатый задатчик напряжения
сопротивление цепи якоря
задатчик нагрузки
распределитель импульсов
источник тока
сигнальный вход с датчиков
обмотка возбуждения тормоза
электромагнитный тормоз
измерительная обмотка
тахогенератора
двигатель постоянного тока
бесконтактный двигатель
постоянного тока (транзисторно-коммутируемый)
система с обратной связью по скорости
Связь между угловой скоростью и частотой вращения
В системе СИ для определения скорости вращения двигателя используют понятие угловой скорости вращения ω, которая измеряется в рад/с, на часто используется и такой те я ни чески и термин как частота вращения - n, которая имеет размерность об/мин. Эти две величины связаны между собой выражением:
ω = π*n/30 = 0.105*n.
Ступенчатое изменение напряжения якоря
Для исследования механических и электромеханических характеристик бесконтактного двигателя при различных напряжениях в соответствии с электрической схемой, изображенной на передней панели стенда, напряжение на якоре может дискретно регулироваться галетным переключателем "VOLTAGE STEP CONTROL" (далее VSC), который имеет четыре положения (положение N 5 заблокировано).
Ступенчатое изменение сопротивления якорной цепи
Для изучения реостатного регулирования скорости вращения двигателя последовательно с якорем двигателя могут дискретно вводиться три добавочных резистора, каждый по 1 Ом. Положение N 1 галетного переключателя "ARMATURE CIRCUIT RESISTANCE" (ACR) соответствует нулевому добавочному сопротивлению, а каждое последующее положение, переключателя ACR увеличивает сопротивление на 1 Ом.
Электромагнитный тормоз
Для нагружения двигателя в стенде используется электромагнитный тормоз, собранный по принципу "баланс-динамо", позволяющий определять момент по угловым отклонения отградуированного лимба. Цена деления зависит от величины нижнего балансирного груза и положения верхние тарировочныи шайб.
Изготовителем устанавливается коэффициент пересчета по моменту:
Кm = 3*10-3 Нм/дел.
При отчете рассматривается большое деление, состоящее из 10 маленьких, без учета вперед и стоящего нуля.
6. Указания по выполнению лабораторной работы
6.1. Проверка работоспособности стенда
Для этого:
- отжать кнопки S1 и S2;
- выставить галетные переключатели VCR и ACR в положение 1;
- вывернуть потенциометры "SPEED CОNTRОL" и "LOAD CONTROL" влево до упора.
- включить автомат на левой боковой панели - должна загореться лампочка "РОWЕR" и двигатель должен прийдти во вращение;
- утопить кнопку переключателя "LOAD CONTROL" (над ней должна загореться лампочка) и поворачивая по часовой стрелке потенциометр "LOAD CONTROL" убедиться в том, что балансирная, система электромагнитного тормоза реагирует поворотом на увеличение тока возбуждения, после чего вывернуть его против чаcовой стрелки;
- выключить автомат.