

книги / Маркшейдерское дело. Анализ точности
.pdfВычисления выполняют в следующем порядке:
1. Ошибки координат и ошибку положения конечного пункта, обусловленные погрешностью определения дирекционного угла исходной стороны, определяют по формулам:
M x |
|
Ry1 m 0 |
, M y |
|
|
Rx1 m 0 |
, M 0 |
|
R1m 0 |
, (3.46) |
|
|
|
|
|||||||
0 |
|
|
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
где R1 – кратчайшее расстояние от конечного пункта до первого, м; Rx1 и Ry1 – проекции кратчайшего расстояния R1 на оси Х и Y; m 0 –
погрешность дирекционного угла исходной стороны, наименьшая из полученных в подразд. 3.5.
2. Ошибки координат и ошибку положения конечного пункта, обусловленные ошибками измерения горизонтальных углов, определяют по формулам:
M x |
|
1 |
Ry2i m2i |
, M y |
|
1 |
Rx2i m2i , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
M |
1 |
li2m2i , |
(3.47) |
||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
где m i – ошибка i-го горизонтального угла, определяется аналитически по формуле (3.12) (для проектных ОМС m не должна превышать 20" [4]); Rxi , Ryi – проекции i-й стороны полигона на оси X,
Y соответственно; li – длина i-й стороны полигона. Результаты вычислений нужно свести в табл. 3.3.
Таблица 3 . 3
Расчет ошибок координат, обусловленных ошибками измерения горизонтальных углов
Вершина |
Rxi , м |
Ryi , м |
m i |
|
Rx |
m |
2 |
|
Ry |
m |
2 |
|
угла |
|
i |
i |
|
|
i |
i |
|
||||
|
|
|||||||||||
2 |
|
|
|
|
|
|
||||||
1 |
3 |
4 |
|
|
5 |
|
|
|
6 |
|
||
Примечание: необходимо произвести суммирование вычисленных значений в 5-м и 6-м столбцах.
31
3. Ошибки координат и ошибку положения конечной точки, обусловленные ошибками измерения длин сторон, определяют по формулам:
M xl |
ml2i cos2 i , |
M yl |
ml2i |
sin2 i , |
|
Ml |
ml2i , |
|
(3.48) |
|
|
|
где mli – ошибка измерения длины i-й стороны полигона, вычисля-
ется с учетом влияния случайных и систематических ошибок по формуле (3.10); i – дирекционные углы сторон полигона; li – дли-
на i-й стороны полигона, м.
Результаты вычислений сводят в табл. 3.4.
Таблица 3 . 4
Расчет ошибок координат, обусловленных ошибками измерения горизонтальных длин линий
Сторона |
Длина |
Дирекционный |
ml , м |
ml2 sin2 i |
ml2 cos2 i |
полигона |
стороны l, м |
угол i , …º |
i |
i |
i |
|
|
|
|||
|
|
|
4 |
|
|
1 |
2 |
3 |
5 |
6 |
Примечания: 1. Необходимо произвести суммирование вычисленных значений в 4, 5 и 6-м столбцах. 2. Первой стороной полигона считается сторона Ствол № 1–1.
По окончании вычислений ошибок, обусловленных определением дирекционного угла первой стороны, измерением горизонтального угла и длин линий, определяют ошибку положения конечного пункта M K и сравнивают ее с допустимой по инструкции
M Kдоп [13, п. 156]. Если M K M Kдоп , то делают вывод о пригодно-
сти выбранной методики. В случае превышения допустимой погрешности методику корректируют и заново производят предрасчет положения конечного пункта.
4. Погрешность дирекционного угла последней стороны полигона определяют по формуле
32

M n m2 |
0 m2i . |
(3.49) |
Необходимо также посчитать допустимую погрешность дирекционного угла последней стороны согласно требованиям инструкции, сравнить с погрешностью, определенной по формуле (3.49),
исделать соответствующие выводы.
3.7.Корректировка методики маркшейдерских работ
ипредрасчет погрешности положения конечного пункта полигона с гиросторонами
3.7.1. Основной способ
Согласно п. 8.5.4 «Инструкции…, 2004» [13, п. 156] ошибка положения наиболее удаленного пункта не должна превышать 0,8 мм на основном плане. Если при принятой методике M K M Kдоп , то не-
обходимо произвести корректировку методики маркшейдерских работ для уменьшения ошибки координат и линейной погрешности положения последнего (наиболее удаленного) пункта.
Доля ошибки ориентировки исходной стороны M 0 и ошибки, обусловленной измерением горизонтальных углов M , в общей
ошибке составляет 80–95 %. Поэтому «Инструкция…, 2004» [13, п. 380] рекомендует уменьшить угловые ошибки путем введения гиросторон в проектируемую опорную сеть. Количество сторон определяется согласно «Инструкции…, 1987» (приложение 14, табл. 19) [4] в зависимости от протяженности ходов, средней длины сторон и масштаба основного плана (табл. 3.5).
Построение систем полигонометрических ходов, разделенных на секции гиросторонами, производят при удалении пунктов сетей от точек центрирования на расстояние более 2 км. Гиростороны размещают через 20–30 углов, или их положение и число определяют при составлении проекта сети. Закрепляют гиростороны постоянными пунктами [13, п. 157].
33
Таблица 3 . 5
Допустимая длина полигонометрических ходов с гиросторонами, км
|
|
Средняя длина стороны, м |
|
|
Число |
|||
30 |
40 |
50 |
60 |
80 |
100 |
160 |
200 |
гиро- |
сторон |
||||||||
|
|
|
Масштаб 1:2000 |
|
|
|
||
1,7 |
1,9 |
2,0 |
2,1 |
2,3 |
2,4 |
2,7 |
2,8 |
1 |
3,1 |
3,3 |
3,5 |
3,7 |
3,9 |
4,1 |
4,3 |
4,6 |
2 |
4,2 |
4,5 |
4,8 |
4,9 |
5,2 |
5,4 |
5,8 |
6,0 |
3 |
5,2 |
5,5 |
5,8 |
5,9 |
6,3 |
6,5 |
6,9 |
7,0 |
4 |
6,0 |
6,4 |
6,6 |
6,8 |
7,2 |
7,4 |
7,8 |
8,0 |
5 |
6,7 |
7,1 |
7,4 |
7,6 |
7,9 |
8,1 |
8,5 |
8,6 |
6 |
7,3 |
7,8 |
8,0 |
8,3 |
8,6 |
8,8 |
9,1 |
9,2 |
7 |
7,9 |
8,3 |
8,6 |
8,8 |
9,1 |
9,3 |
9,6 |
9,8 |
8 |
8,4 |
8,8 |
9,1 |
9,3 |
9,6 |
9,8 |
10,0 |
10,2 |
9 |
8,9 |
9,3 |
9,5 |
9,7 |
10,0 |
10,2 |
10,5 |
10,6 |
10 |
|
|
|
Масштаб 1:1000 |
|
|
|
||
1,1 |
1,2 |
1,2 |
1,3 |
1,4 |
1,4 |
1,5 |
1,8 |
1 |
1,8 |
2,0 |
2,0 |
2,1 |
2,2 |
2,3 |
2,4 |
2,6 |
2 |
2,5 |
2,6 |
2,7 |
2,8 |
3,0 |
3,0 |
3,1 |
3,2 |
3 |
3,0 |
3,1 |
3,2 |
3,4 |
3,5 |
3,6 |
3,7 |
3,8 |
4 |
3,5 |
3,6 |
3,7 |
3,8 |
3,9 |
4,0 |
4,1 |
4,2 |
5 |
3,8 |
4,0 |
4,1 |
4,2 |
4,3 |
4,4 |
4,4 |
4,5 |
6 |
4,1 |
4,3 |
4,4 |
4,5 |
4,6 |
4,7 |
4,8 |
4,8 |
7 |
4,4 |
4,6 |
4,7 |
4,7 |
4,9 |
4,9 |
4,9 |
5,0 |
8 |
4,7 |
4,8 |
4,9 |
5,0 |
5,0 |
5,1 |
5,2 |
5,2 |
9 |
4,9 |
5,0 |
5,1 |
5,2 |
5,3 |
5,3 |
5,4 |
5,4 |
10 |
Предрасчет погрешности положения удаленного пункта в опорных сетях с гиросторонами (рис. 3.8) выполняется по формуле, рекомендованной в приложении 14 «Инструкции…, 1987» [4]:
|
2 |
|
m2 |
t1 |
|
2 |
|
t2 |
2 |
|
tr |
2 |
tr 1 |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
M K |
|
|
|
DO1 |
,i DO2 ,i ... DOr ,i Ri |
|
|
||||||||||||||
|
2 |
|
|||||||||||||||||||
|
|
|
|
|
i 1 |
|
|
|
|
i 1 |
|
|
i 1 |
|
i 1 |
|
|
|
|
||
|
|
m2 |
|
r 1 |
2 |
|
|
|
|
2 |
2 |
|
2 |
n |
|
2 |
|
|
|||
|
|
Г |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||
|
|
|
|
|
DO |
,O |
|
|
D1,O |
DO |
,K |
li |
Lx |
, |
(3.50) |
||||||
|
|
2 |
|
|
|
||||||||||||||||
|
|
|
|
j 1 |
j |
|
( |
j 1) |
|
1 |
r |
|
|
i 1 |
|
|
|
|
|||
где M K – погрешность положения последнего пункта хода K; m – погрешность измерения горизонтальных углов; m Г – погрешность
34

определения дирекционных углов гиросторон; и – коэффици-
енты влияния случайных и систематических ошибок при линейных измерениях; n – число сторон хода; r – число секций хода; t – число углов хода; DO1 ,i , DO2 ,i ,…, DOr ,i – расстояния, определяемые в каж-
дой секции от центра тяжести до i-го пункта секции; Ri – расстоя-
ние от i-го пункта висячего хода, опирающегося на гиросторону, до последнего пункта K; DO j ,O( j 1) – расстояние между центрами тяже-
сти смежных секций ϳ и ϳ+1; D1,O1 – расстояние от первого пункта хода до центра тяжести первой секции; DOr ,K – расстояние от цен-
тра тяжести последней секции до последнего пункта K; li – длина i-й стороны хода; Lх – длина замыкающей хода.
Рис. 3.8. Схема полигонометрического хода, разделенного на секции гиросторонами
Гиросторонами ход делится на секции. Координаты центра тяжести Oj каждой секции определяются как среднее арифметическое координат пунктов, входящих в j-ю секцию, включая координаты двух пунктов гиросторон, на которые опирается секция. Результаты всех вычислений можно свести в табл. 3.6.
35
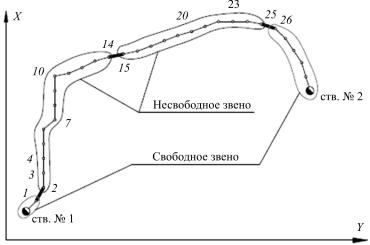
Таблица 3 . 6
Расчет погрешности положения удаленного пункта основным способом
Номер |
Номер |
x, м |
y, м |
x , м |
y , м |
D2 |
|
, м |
R |
2 |
, м |
|||
секции |
вершины угла |
О |
j |
О |
j |
O |
j ,i |
|
|
|
||||
|
|
|
|
|
|
i |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
2 |
3 |
4 |
|
5 |
|
6 |
|
7 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассчитанную погрешность положения последнего пункта нужно сравнить с допустимой и сделать вывод о пригодности выбранной методики.
3.7.2. Способ А.Н. Медянцева (метод «эквивалентных ходов»)
Основной способ основан на вычислении поперечных и продольных погрешностей и применяется для вытянутых равносторонних ходов, разделенных на секции (звенья) гиросторонами. Но при появлении в опорной сети произвольных секций (звеньев) расчеты значительно усложняются, поэтому следует заменять эти секции (звенья) «эквивалентными» ходами, близкимиквытянутым(рис. 3.9) [10].
Рис. 3.9. Схема полигонометрического хода к определению погрешности положения конечного пункта по способу А.Н. Медянцева
36

Эквивалентная длина секции вычисляется по формуле
|
S 0,5 |
3Lc Si 2 |
, |
|
(3.51) |
|
|
c |
|
|
|
где Lc |
– длина замыкающей секции, м; Si |
|
– сумма длин сторон |
||
|
|
|
|
с |
|
секции, м.
Для полигонометрического хода, состоящего из N несвободных секций (звеньев) и двух свободных секций, погрешность положения удаленного пункта вычисляется по формуле:
|
|
|
|
|
|
m |
2 |
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
M K2 |
|
|
|
|
|
4SI2nI 4SII2 nII S12n1 |
|
|
|
|||||||||
|
|
|
|
|
2 |
|
|
||||||||||||||
|
|
|
|
|
12 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
m20 |
|
|
S1 |
2 |
|
|
S1 |
|
S2 |
2 |
|
|
SN |
|
2 |
|
||||
|
|
|
SI |
|
|
|
|
|
|
|
|
... |
|
|
|
SII |
|
|
|||
|
2 |
2 |
2 |
2 |
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 Si 2 Si2 , |
(3.52) |
где SI и SII – эквивалентные длины свободных звеньев (т.е. край- |
|
них – звено в начале и звено в конце), м; S1 , S2 ,..., SN |
– эквивалент- |
ные длины несвободных звеньев, м; nI и nII – число сторон в свободных секциях; n1 ,n2 ,...,nN – число сторон в несвободных секциях.
Для удобства расчетов данные сводят в табл. 3.7.
Таблица 3 . 7
Расчет погрешности положения удаленного пункта по методу А.Н. Медянцева
Обозначение |
Форма |
Длина |
Число |
Длина |
Эквивалент- |
секции |
сторон |
замыкающей |
ная длина |
||
секции |
секции |
Si с , м |
в секции п |
секции Lc , м |
секции S, м |
|
|
||||
1 |
2 |
3 |
4 |
5 |
6 |
Ствол № 1–1 |
Свободная |
… |
1 |
… |
… |
2–14 |
Несвободная |
… |
12 |
… |
… |
15–25 |
Несвободная |
… |
10 |
… |
… |
26–Ствол № 2 |
Свободная |
… |
5 |
… |
… |
|
|
|
|
|
|
37

Рассчитанную погрешность положения последнего пункта нужно сравнить с допустимой и сделать вывод о пригодности выбранной методики.
3.8. Оценка точности ориентировки через два вертикальных шахтных ствола
Под ошибкой ориентировки через два вертикальных шахтных ствола понимается погрешность дирекционного угла одной из сторон подземного соединительного полигона. Точность ориентирования, как правило, оценивают по ошибке дирекционного угла той стороны, которая в дальнейшем будет исходной для развития теодолитной съемки (например, сторона 1–2 на рис. 3.10).
Отметим, что наибольшее влияние на точность передачи дирекционного угла при геометрических способах ориентирования через один вертикальный ствол оказывает угловая ошибка проектирования . В случае ориентировки через два ствола необходимая для соединительной съемки вертикальная плоскость создается двумя отвесами, расположенными друг от друга на значительном расстоянии. Угловая погрешность проектирования в соответствии с формулой (3.24) будет незначительной, что является основным преимуществом ориентирования через два ствола, особенно для глубоких горизонтов.
Средняя квадратическая погрешность определения дирекционного угла i-й стороны подземного соединительного полигона вычисляется в общем виде по формуле
M |
орi |
|
M 2 |
2 |
M 2 |
, |
(3.53) |
|
|
п |
|
шi |
|
|
где – угловая погрешность проектирования; Mп – погрешность
примыкания на поверхности, т.е. погрешность дирекционного угла створа отвесов АВ, зависящая от погрешностей измерения углов и длин сторон в подходных полигонах на поверхности; Mшi – по-
грешность примыкания в шахте, т.е. погрешность дирекционного угла i-й стороны подземного полигона, зависящая от погрешностей измерения углов и длин сторон соединительного полигона в шахте.
38
Отметим, что погрешности и Mп одинаковы при оценке точности дирекционных углов всех сторон соединительного полигона, а Mшi будет различна для каждой оцениваемой стороны. При определении погрешностей Mп и Mшi воспользуемся формулами нако-
пления погрешностей в свободных ходах [5].
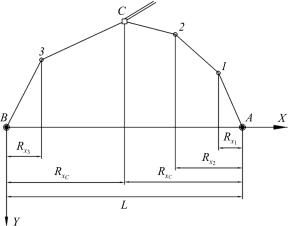
Для оценки точности ориентировки через два вертикальных шахтных ствола необходимо задать условную систему координат, при этом ось X направить по створу отвесов А и В, а ось Y – ей перпендикулярно, начало системы координат поместим в точку В
(см. рис. 3.10).
Рис. 3.10. Схема примыкания к отвесам на поверхности
Перед началом вычисления погрешности примыкания к отвесам на поверхности требуется создать полигонометрический ход на поверхности согласно требованиям инструкции. Форма хода и положение репера С задается преподавателем. Следует отметить, что необходимо будет проложить два хода от репера С к стволам А и В соответственно, а также привести таблицу исходных данных ОМС на поверхности, отразив в ней измеренный левый по ходу угол для каждой вершины полигона и длину стороны полигона.
Определение погрешности примыкания к отвесам на по-
верхности. Эта погрешность зависит от смещения отвесов А и В по
39

оси Y , вызванного погрешностями углов и длин сторон примычных полигонов С-2-1-А и С-3-В. Смещения можно определить отдельно для каждого отвеса по следующей формуле:
2 |
|
m2 |
C |
2 |
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|||
MY |
|
|
|
Rxi |
mli |
sin |
|
i , |
(3.54) |
|
2 |
|
|||||||
|
|
|
A |
|
|
|
|
|
|
где m – средняя квадратическая ошибка измерения горизонтального угла полигонометрии на поверхности; Rxi – проекции на створ
отвесов АВ расстояний от точек полигона С-3-В и от точек полигона С-2-1-А до точек В и А соответственно; mli – ошибка измерения
длин сторон подходных полигонов на поверхности; i – дирекци-
онный угол i-й стороны.
Поскольку для полигонометрии на поверхности точность измерения длин li выражается в виде относительной погрешности, то
mli Tli , где Т – знаменатель относительной погрешности. Отсюда
m sin |
i |
yi , |
(3.55) |
l |
T |
|
|
i |
|
|
|
|
|
|
где yi – проекции на ось Y расстояний от точек полигона С-3-В
и от точек полигона С-2-1-А до точек В и А соответственно. Погрешность примыкания на поверхности определяется по
формуле
Mп |
|
MY2 |
MY2 . |
(3.56) |
|
L |
A |
B |
|
|
|
|
Подставив в эту формулу выражения (3.54) и (3.55), получим:
|
m2 |
2 |
|
2 |
2 |
|
|
|
Mп |
|
Rxi |
|
|
|
yi |
, |
(3.57) |
2 |
2 |
2 |
||||||
|
L |
|
|
L T |
|
|
|
|
где L – расстояние между отвесами АВ, м.
40