

книги / Системы управления электромеханическими исполнительными механизмами
..pdf3.Результаты расчета параметров аналогового регулятора скорости и предшествующего фильтра.
4.Результаты «переоборудования» аналоговых регулятора скорости и предшествующего фильтра в дискретные звенья методом прямоугольников.
5.Результаты «переоборудования» аналоговых регулятора скорости и предшествующего фильтра в дискретные звенья методом трапеций.
6.Модели в среде Simulink и результаты моделирования аналоговой и двух дискретно-непрерывных СУЭП.
7.Выводы по результатам исследования.
Контрольные вопросы
1.Что такое подчиненное регулирование координат электропривода, каковы основные принципы их построения?
2.Что такое «переоборудование» аналоговых регуляторов в дискретную форму, в чем заключается применение метода прямоугольников и трапеций при интерполяции сигналов?
3.Что относят к типовым настройкам контуров регулирования скорости СУЭП, для чего на входе замкнутого контура устанавливают предшествующий фильтр? Каковы прямые показатели качества регулирования этих контуров?
4.Привести пример переоборудования ПИ-регулятора скорости и предшествующего фильтра в виде апериодического звена первого порядка методом прямоугольников.
5.Привести пример переоборудования ПИ-регулятора скорости и предшествующего фильтра в виде апериодического звена первого порядка методом трапеций (Тастина).
6.Дать сравнительный анализ результатов имитационного моделирования аналогового и дискретно-непрерывных контуров регулирования скорости при приложении задающего ступенчатого воздействия «в малом».
71
Лабораторная работа № 8. Синтез и анализ цифровых следящих систем
управления положением исполнительных механизмов с регуляторами класса «вход – выход»
Цель работы – ознакомление студентов с основными положениями теории синтеза цифровых следящих систем управления положением рабочих органов исполнительных механизмов с параметрически оптимизируемыми регуляторами класса «вход – выход», а также формирование у студентов умений и навыков исследования таких систем управления с применением компью-
терной среды Matlab/Simulink.
Краткие теоретические сведения
Следящие ЭМСУ – наиболее сложный класс систем управления положением РО механизмов, характеризующихся специфическими требованиями к отработке с минимальной динамической ошибкой заведомо неизвестных задающих воздействий. При оценках качества регулирования таких систем оперируют не понятиями качества переходных процессов, а, прежде всего, понятиями добротности следящих САУ по скорости и ускорению [9, 13]. Структуры следящих ЭМСУ синтезируют в классе систем, инвариантных как минимум в отношении задающих воздействий.
На рис. 3.6 приведена схема имитационного моделирования такой системы в среде Matlab/Simulink.
Вкачестве тестового воздействия в следящих ЭМСУ общепринято использовать вектор задания механических фазовых переменных, включающий в общем случае для инвариантных САУ компоненты задания углового положения, скорости и ускорения РО механизма (fi_z, w_z, e_z, см. рис. 3.6).
Вприведенном примере оцениваются добротность следящей ЭМСУ по ускорению и абсолютная величина динамическойошибки слеженияспомощьювиртуальныхосциллографовивольтметров.
72

Рис. 3.6. Схема имитационного моделирования следящей ЭМСУ
В качестве замкнутой по положению следящей ЭМСУ студентам предлагается исследовать типовую трехконтурную систему регулирования положения РО механизма с подчиненными контурами регулирования скорости и электромагнитного момента (тока), а, следовательно, в качестве ЭМОУ можно использовать, например, структуры, приведенные на рис. 3.2, б–г.
Добротность следящей ЭМСУ по ускорению оценивается по выражению
D зад / уст , |
(3.21) |
где зад – заданное ускорение в процессе слежения (e_z); уст –
установившаяся ошибка слежения по положению РО. Результаты отработки тестовых воздействий по всем фазовым
переменным (положению, скорости и ускорению РО) можно проконтролировать по показаниям виртуального осциллографа Scope, динамическую и установившуюся ошибку слежения можно проконтролировать по показаниям виртуального осциллографа Scope1. Численные значения установившейся ошибки слежения (рад) и добротности по ускорению (c–2) можно проконтролировать по показаниямсоответствующихвиртуальныхвольтметров(см. рис. 3.6).
73
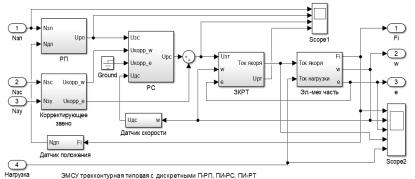
Схема имитационного моделирования подпрограммы следящей ЭМСУ приведена на рис. 3.7.
Рис. 3.7. Схема имитационного моделирования следящей ЭМСУ
На этой схеме замкнутый контур регулирования тока и электромеханическая часть соответствуют рис. 3.2, б. Регулятор скорости – типовой аналоговый или дискретный ПИ-регулятор, обеспечивающий настройку контура регулирования скорости на симметричный оптимум (см. описание предыдущей лабораторной работы № 7). В совокупности с предшествующим фильтром на входе замкнутый контур регулирования скорости отвечает динамике фильтра Баттерворта 3-го порядка [9, 13].
Регулятор положения РП – пропорциональный, обеспечивает апериодический процесс в замкнутой следящей ЭМСУ, т.е.
Wрп (z) Wрп (p) |
Kс |
Kрп, |
(3.22) |
|
4ТμпK Kп |
||||
|
|
|
||
гдеKс – коэффициент обратной связи по скорости, о.е.; |
Тμп – |
|||
эквивалентная малая постоянная времени контура регулирования положения, Тμп 4Tμс , с; K – коэффициент редукции при-
вода ИМ, см. табл. 3.1, о.е.; Kп – коэффициент обратной связи по положению, о.е.
74
Целесообразно принять Kп = 1, что позволит задавать код положения Nзп РО ИМ в именованных единицах («рад» или «м» в системе СИ). При этом задание Nзс угловой или линейной скорости будет в «рад/с» или «м/с», а задание Nзу углового или линейного ускорения – в «рад/с2» или «м/с2».
Корректирующее звено обеспечивает инвариантность следящей ЭМСУ по отношению к задающим воздействиям и содержит два пропорциональных корректирующих звена по каналам задания скорости и ускорения с коэффициентами передачи, равными коэффициенту Kс обратной связи по скорости.
Порядок выполнения работы
иметодические указания
1.Получить от преподавателя задание на выполнение лабораторной работы, включающее структуру подчиненного ЭМОУ (рекомендуется рассматривать структуру, приведенную на рис. 3.2, б)
иномер вариантапараметровЭМОУ(см. табл. 3.1).
2.Провести структурно-параметрический синтез замкнутого контура регулирования скорости с применением методики, изложенной в лабораторной работе № 7 с учетом процедуры «переоборудования» регулятора в дискретную передаточную функцию (см. модуль РС на рис. 3.7).
3.Провести параметрический синтез пропорционального регулятора положения РП по критерию апериодического оптимума 2-го порядка в замкнутом контуре регулирования положения (см. выражение 3.22).
4.Создать имитационную модель формирования тестовых воздействий на входе следящей СУЭП – задания положения, скорости и ускорения (следовать рекомендациям преподавателя или самостоятельно определить допустимые уровни заданных фазовых переменных электропривода, исключающие возможность насыщения регуляторов).
5.Создать имитационную модель следящей ЭМСУ в соответствии с рис. 3.6, 3.7. При этом предусмотреть возможность
75
подачи дополнительных корректирующих сигналов от корректирующего звена на входы регуляторов скорости и тока, включив на их входах суммирующие элементы.
6.Провести имитационное моделирование следящей ЭМСУ при отработке вектора задающих воздействий (положения, скорости и ускорения РО механизма) и возмущающего воздействия в виде ступенчатого приложения номинальной нагрузки к валу привода. Рекомендуется момент времени наброса нагрузки на валу осуществлять после формирования установившегося режима отработки задающих воздействий.
7.Сохранить результаты исследований в виде расчетов параметров регуляторов, схем моделирования и графиков динамических процессов в следящей СУЭП.
Содержание отчета
1.Титульный лист, отвечающий требованиям к оформлению лабораторных работ.
2.Задание в форме структурной схемы ЭМОУ (рис. 3.2, б) и номеравариантасперечнемпараметроввсоответствиистабл. 3.1.
3.Результаты синтеза дискретных регуляторов скорости и положения.
4.Схемы имитационных моделей следящей СУЭП и всех ее подсистем в среде Matlab/Simulink.
5.Результаты моделирования следящей СУЭП при отработке вектора задающих воздействий в виде скриншотов графиков экранов виртуальных осциллографов.
6.Результаты моделирования следящей СУЭП при отработке возмущающего воздействия на валу электропривода в виде скриншотов графиков экранов виртуальных осциллографов.
7.Привести численные значения оценок установившихся ошибок слежения и добротностей по ускорению по показаниям виртуальных вольтметров.
8.Выводы по результатам исследования.
76
Контрольные вопросы
1.В чем заключается специфика функционирования и тестирования следящих ЭМСУ?
2.Что относят к типовым тестовым воздействиям следящих ЭМСУ?
3.Что такое «добротности» следящей ЭМСУ по скорости и ускорению и как они рассчитываются?
4.Пояснить, что понимается под инвариантностью следящих ЭМСУ по отношению к задающим воздействиям, каковы пути ее достижения?
5.Пояснить результаты имитационного моделирования следящей ЭМСУ при отработке квадратичного во времени закона изменения задания положения РО механизма и при приложении к валу электропривода ступени нагрузки.
6.Оценить установившееся значение ошибки слежения и добротность системы по ускорению привода, используя осциллограммы отработки задающего воздействия по положению РО в установившихся режимах. Сравнить полученные значения с показаниями виртуальных осциллографов.
77
ЗАКЛЮЧЕНИЕ
В последние два-три десятилетия системы управления исполнительными механизмами претерпевают существенные изменения, что связано, прежде всего, с бурным развитием микропроцессорной техники и ее доступностью. Отметим основные моменты, определяющие сегодняшнее состояние, а также основные тенденции в развитии СУИМ и СУЭП.
1.Становление российских научно-производственных фирм, предприятий-разработчиков и производителей ИМ и СУИМ (НПФ «КонтрАвт», НПФ «ОВЕН», «МЗТА», «ЗЭиМ», ЗИМ, «Тулаэлектропривод», «Сибмаш» и др.).
2.Интенсивное развитие дилерских сетей, рост числа и развитие фирм-поставщиков средств автоматизации, выпускаемых зарубежными компаниями, такими как Siemens, Omron, Schneider Electric и многими другими.
3.Создание многочисленных специализированных центров подготовки и переподготовки специалистов в области автоматизации, а также становление и развитие различных пусконаладочных организаций.
4.Наблюдается интенсивный переход от локальной автоматизации к построению интегрированных, полнофункциональных многоуровневых и распределенных (децентрализованных) систем управления. Учитывая место СУИМ и СУЭП в АСУТП (нижний уровень контроля и управления) нельзя не отметить появление на рынке многоканальных модулей ввода-вывода и управления (MDS-модулей).
5.Доминирование в СУИМ как постоянной, так и переменной скорости ЭИМ переменного тока (асинхронных с коротко-
замкнутым ротором, синхронных с постоянными магнитами), а также бесколлекторных двигателей постоянного тока – БДПТ (вентильных электроприводов).
6. Доминирование в СУИМ постоянной скорости бесконтактных реверсивных пускателей серий БУЭР, ПБР, БКР,
78
ФЦ, МСТ и др., а также специализированных или универсальных микропроцессорных регуляторов-измерителей, таких как МЕТАКОН 5х2, МЕТАКОН 5х4, Т-424, РС-29М, ТРМ133, ТРМ151, ОВЕН ПЛК и др.
7.Доминирование в СУИМ переменной скорости ЭИМ с час- тотно-регулируемымимикропроцессорнымиэлектроприводами.
8.Интегрирование интеллектуальных модулей в части объединения СПЭ с ЭИМ, что обеспечивает компактность и быстродействие СУИМ.
9.Оснащение СУИМ средствами интеллектуализации (идентификации, адаптивной настройки алгоритмов управления, самодиагностики, сетевого обмена информацией и др.).
79
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Государственная система промышленных приборов и средств автоматизации: Номенклатурный каталог. – М.: ЦНИИТЭИ приборостроения, 1984. – Ч. 1. – 172 с.
2.Механизмы электрические исполнительные однооборотные МЭО(Ф): Руководство по эксплуатации ЯЛБИ.421321.073 РЭ / ОАО «АБС ЗЭиМ Автоматизация». – Чебоксары, 2016. – 42 с.
3.Плескач Н.В. Интеллектуальные средства для исполнительных механизмов ОАО «ЗЭиМ» // Промышленные АСУ и контроллеры. – 2005. – № 11. – С. 16–27.
4.Блок сигнализации положения токовый БСПТ-10МА: Руководство по эксплуатации ЯЛБИ.426449.152 РЭ / ОАО «АБС ЗЭиМ Автоматизация». – Чебоксары, 2017. – 17 с.
5.Блок коммутации реверсивный БКР: Паспорт ПИМФ. 426471.002 ПС/ НПФ«КонтрАвт». – Н. Новгород, 2017. – 13 с.
6.Регуляторы микропроцессорные измерительные МЕТАКОН5X4: Руководство по эксплуатации ПИМФ.421243.066-02 РЭ / НПФ «КонтрАвт». – Н. Новгород, 2017. – 53 с.
7.Интеллектуальные блоки управления электроприводом «МикроСТАРТ-А»: Руководство по эксплуатации БМДК.648600.012 РЭ/ НПФ «БИТЕК». – Екатеринбург, 2017. – 52 с.
8.Модуль вывода управляющий восьмиканальный МВУ8: Паспорт и руководство по эксплуатации / НПФ «ОВЕН». – М., 2008. – 64 с.
9.Казанцев В.П. Системы управления исполнительными механизмами: учеб. пособие. – Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2015. – 271 с.
10.Куо Б. Теория и проектирование цифровых систем управления: пер. с англ. – М.: Машиностроение, 1986. – 448 с.
11.Казанцев В.П. Теория автоматического управления (линейные системы): учеб. пособие. – Пермь: Изд-во Перм. гос. техн.
ун-та, 2007. – 165 с.
80