

книги / Статистические и интеллектуальные методы прогнозирования
..pdf4. АВТОРЕГРЕССИОННЫЕ МОДЕЛИ
Авторегрессионные модели – это модели временного ряда, в которых значения прогнозируемого ряда зависят от предыдущих значений данного ряда или предыдущих значений других параметров (характеристик) временного ряда [9, 13]. Авторегрессионная модель имеет вид
y(k) a0 |
p |
|
ai y(k i) , |
(4.1) |
|
|
i 1 |
|
где y(k) – прогнозируемое значение;
y(k i) – значения параметров процесса на наблюдаемом
интервале;– неучтенные параметры или вспомогательные параметры,
рассчитанные на основе наблюдаемых значений процесса. Очевидно, что (4.1) представляет собой модель времен-
ного ряда. В авторегрессионных моделях прогнозируемое значение в некоторой точке временного ряда сильно коррелировано с несколькими предшествующими и/или последующими значениями. Действительно, для многих явлений текущее состояние функционально определяется предшествующими состояниями системы: в большей степени недавними, в гораздо меньшей – далеко отстоящими от текущего значения временного ряда. Подобные связи принято называть автокорреляцией – корреляцией ряда с самим собой.
Автокорреляция первого порядка характеризует тесноту связи между соседними значениями временного ряда, автокорреляция второго порядка – между отстоящими на два периода значениями временного ряда и т.д. В общем случае автокорреляция р-го порядка относится к степени связанности откликов, разнесенных на р периодов. В задачах прогнозирования предполагается, что возникшая связь между значениями сохранится
51
некоторое время в будущем, т.е. имеет место механизм прогнозирования, основанный на построении регрессии точек ряда на самих себя, т.е. авторегрессии.
Различают следующие разновидности авторегрессионных моделей [13, 14, 15]:
AR – autoregressive model – авторегрессионные модели;
МА – moving average – модель скользящего среднего;
I – integration – модель интегрирования;
ARMA – autoregressive moving average – модель авто-
регрессии скользящего среднего;
ARIMA – autoregressive integrated moving average – ин-
тегрированная модель авторегрессии скользящего среднего;
ARIMAX – autoregressive integrated moving average eXtended – расширенная интегрированная модель авторегрессии – скользящего среднего.
Рассмотрим данные модели подробно.
4.1.АВТОРЕГРЕССИОННАЯ МОДЕЛЬ AR(p)
Авторегрессионная модель (AR(p)) – модель временных рядов, в которой значения временного ряда в данный момент линейно зависят от предыдущих значений этого же ряда. Авторегрессионный процесс p-го порядка определяется следующим образом:
y(k) a0 |
p |
|
ai y(k i) (k), |
(4.2) |
|
|
i 1 |
|
где a0 – постоянная составляющая модели авторегрессии; ai – параметры модели авторегрессии;
(k) – ошибка модели.
Иногда постоянную составляющую и ошибку объединяют. Это можно объяснить так: постоянная составляющая включает в себя неучтенные влияния, которые и являются ошибками или случайными составляющими модели:
52
y(k) a0 |
p |
|
ai y(k i). |
(4.3) |
|
|
i 1 |
|
При вычислении будущего значения временного ряда в определенной точке составляется система линейных уравнений (p + 1)-го порядка с (p + 1) неизвестным и определяются коэффициенты ai .
Авторегрессионная модель 1-го порядка (AR (1)) имеет вид
y(k) a0 a1y(k 1). |
(4.4) |
Линейная модель авторегрессии 1-го порядка состоит только из одного влияющего фактора, а именно y(k 1) , т.е. изучает-
ся наиболее тесная зависимость только от того, каким был итоговый показатель периодом с шагом назад.
Авторегрессионная модель 2-го порядка (AR (2)) имеет вид
y(k) a0 a1y(k 1) a2 y(k 2). |
(4.5) |
Модель авторегрессии 2-го порядка отличается от первой тем, что она включает в себя еще один влияющий фактор y(k 2), т.е. показывается зависимость от двух предыдущих
значений.
Авторегрессионная модель p-го порядка (AR (p)) имеет вид y(k) a0 a1y(k 1) a2 y(k 2) ap y(k p). (4.6)
Предположим, у нас имеется временной ряд y(k) , представ-
ленный на рис. 4.1. Нужно вычислить будущее значение временного ряда в точке 41, т.е. значение y(41) (точка отмечена красным
цветом) на основании 40 предыдущих точек y(1), y(2), …, y(40)
с использованием модели авторегрессии.
Формула для определения y(41) выглядит следующим образом и называется авторегрессией порядка p:
y(41) a0 a1y(40) a2 y(39) a3 y(38) ap y(41 p) .
53

Рис. 4.1. Временной ряд
В этой формуле известны значения y(40), y(39) , y(38)
и т.д., но неизвестны коэффициенты авторегрессии ai. Для определения значений коэффициентов ai необходимо составить систему линейных уравнений:
y(40) a0 |
a1y(39) a2 y(38) |
ap y(40 p); |
|||
|
|
a0 |
a1y(38) a2 y(37) |
ap y(39 p); |
|
y(39) |
|||||
|
|
|
|
|
(4.7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
p 1) a0 |
a1y(40 p 2) ap y(40 2p). |
|||
y(40 |
|||||
Таким |
|
образом, |
имеется система линейных уравнений |
||
(p 1) -го порядка с (p 1) неизвестными коэффициентами ai. В данной системе уравнений известны значения y(i), а следо-
вательно, определить коэффициенты ai не представляет особого труда.
Однако построенная модель определяет автокорреляцию не на всем интервале наблюдений, а только на глубину погружения до y(40 2p). Поэтому при построении возникают вопросы:
1)каков должен быть порядок p?
2)каким образом должны учитываться все значения временного ряда?
54
При решении 2-го вопроса достаточно использовать регрессионную модель (3.7).
Первый вопрос на практике решается интуитивно, исходя из опыта разработчика и априорной информации о временном ряде. Естественно, главным критерием является точность модели.
Модель авторегрессии, с одной стороны, довольно проста, так как принцип ее работы понятен и нагляден; с другой – сложна тем, что в ней имеет место множество нюансов, которые требуют кропотливого труда разработчика. Однако, несмотря на все нюансы, рассмотренная модель является частью большой модели ARIMAX, которая на сегодняшний день чрезвычайно популярна для решения задач прогнозирования временных рядов.
ПРИМЕР 4.1. Построить авторегрессионную модель 3-го порядка на основе данных примера 3.1.
Авторегрессионная модель 3-го порядка имеет вид y(k) a0 a1 y(k 1) a2 y(k 2) a3 y(k 3).
Для данной модели необходимо определить коэффициенты авторегрессии a0, a1, a2, a3 .
В качестве значений временного ряда используются значения y :
Исходные данные
y |
2.143 |
|
1.754 |
|
1.548 |
|
1.624 |
|
1.324 |
|
1.249 |
|
0.800 |
0.528 |
|
|
0.623 |
0.544 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
0.400 |
0.312 |
|
0.330 |
|
0.298 |
|
0.284 |
|
0.305 |
|
0.274 |
0.246 |
|
0.155 |
|
|
0.100 |
|
0.084 |
||||||||
|
|
Для |
|
применения |
формулы |
|
A [ХT Х] 1 ХTY , |
основные |
|||||||||||||||||||
матрицы определяются следующим образом:
55
|
1 |
0.100 |
0.155 |
0.248 |
|
|
|
0.155 |
0.248 |
|
|
|
1 |
0.274 |
|||
|
|
0.248 |
0.274 |
|
|
|
1 |
0.305 |
|||
|
1 |
0.274 |
0.305 |
0.284 |
|
|
1 |
0.305 |
0.284 |
0.298 |
|
|
|
0.284 |
0.298 |
|
|
|
1 |
0.330 |
|||
|
1 |
0.298 |
0.330 |
0.312 |
|
|
|
0.330 |
0.312 |
|
|
|
1 |
0.400 |
|||
|
|
0.312 |
0.400 |
|
|
X |
1 |
0.544 |
|||
|
0.400 |
0.544 |
|
|
|
|
1 |
0.623 |
|||
|
1 |
0.544 |
0.623 |
0.528 |
|
|
1 |
0.623 |
0.528 |
0.800 |
|
|
|
0.528 |
0.800 |
1.249 |
|
|
1 |
|
|||
|
1 |
0.800 |
1.249 |
1.322 |
|
|
|
1.249 |
1.322 |
|
|
|
1 |
1.624 |
|||
|
|
1.322 |
1.624 |
1.548 |
|
|
1 |
|
|||
|
|
1.624 |
1.548 |
1.754 |
|
|
1 |
|
|||
|
1 |
1.548 |
1.754 |
2.143 |
|
0.0840.100
0.155
0.248
0.2740.305
0.2840.298
Y 0.3300.312
0.400
0.5440.623
0.5280.800
1.249
1.322
1.624
a0 A a1a2a3
Таким образом, коэффициенты авторегрессинной модели 3-го порядка будут иметь значения:
a0 |
|
0.0158 |
|
a1 |
|
0.7137 |
|
A |
|
|
|
a |
|
0.0963 |
|
2 |
|
|
|
a3 |
0.2172 |
|
|
Результаты моделирования авторегрессионной модели 3-го порядка приведены в табл. 4.1 и на рис. 4.2 (жирным шрифтом указаны спрогнозированные значения временного ряда).
56
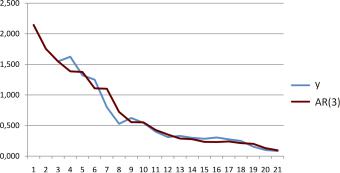
Таблица 4.1
Исходные данные
у |
AR (3) |
у |
AR (3) |
у |
AR (3) |
2.143 |
2.143 |
0.528 |
0.722 |
0.284 |
0.233 |
1.754 |
1.754 |
0.623 |
0.555 |
0.305 |
0.230 |
1.548 |
1.548 |
0.544 |
0.552 |
0.274 |
0.239 |
1.624 |
1.386 |
0.400 |
0.427 |
0.248 |
0.212 |
1.322 |
1.375 |
0.312 |
0.353 |
0.155 |
0.201 |
1.249 |
1.108 |
0.330 |
0.287 |
0.100 |
0.130 |
0.800 |
1.101 |
0.298 |
0.277 |
0.084 |
0.095 |
Рис. 4.2. Графики исходных данных и авторегрессионной моделиAR (3)
Следует отметить, что на графике первые три точки совпадают, так как для AR (3) расчет прогноза начинается с 4-й точки.
4.2.МОДЕЛЬ СКОЛЬЗЯЩЕГО СРЕДНЕГО (МА)
Модель скользящего среднего МА (q) – общее название для регрессионных моделей, значения которых в каждой точке прогнозирования равны среднему значению временного ряда за определенный период.
В общем случае модель скользящего среднего q-го порядка МА (q) имеет вид
57
y(k) b0 |
q |
|
bi (k i) , |
(4.8) |
|
|
i 1 |
|
где (k i) – значения ошибок за предыдущий период; bi – коэффициенты модели скользящего среднего.
Модель скользящего среднего предполагает, что в ошибках модели в предшествующие периоды сосредоточена информация обо всей предыстории ряда. В этой модели каждое новое значение – среднее между текущей флуктуацией и несколькими предыдущими ошибками.
На практике применяют такую разновидность модели скользящего среднего:
|
|
|
1 |
q |
|
|
y(k) F(y(k q)) F( |
(4.9) |
|||||
|
y(k i)) . |
|||||
|
|
|
q i 1 |
|
||
Часто в исследуемом процессе имеются выбросы. Как правило, они весьма сложно исследуются. Такие выбросы сильно влияют на прогнозные значения, поэтому данная модель строится на средних значениях некоторого интервала q, таким образом, осуществляется фильтрация помех (сглаживаются по- мехи-выбросы) и определяется прогнозируемое значение без вредных помех (выбросов).
Самый простой вид модели скользящего среднего имеет вид
|
1 |
q |
i) , |
(4.10) |
y(k) y(k q) |
|
y(k |
||
|
q i 1 |
|
|
|
т.е. скользящее среднее для момента |
k 1 |
является алгебраиче- |
||
ским средним нескольких предыдущих значений исходного временного ряда y(k).
Таким образом, скользящее среднее представляет собой фильтр, который позволяет сглаживать выбросы временного ряда, которые спрогнозировать достаточно сложно или вовсе невозможно.
58
Использование скользящего среднего позволяет сделать прогноз только на одно значение в будущее, так как последующие значения требуют фактической наблюдаемости предыдущих значений [15]. Однако данный метод широко используется для сглаживания временного ряда, выявления трендов и признаков.
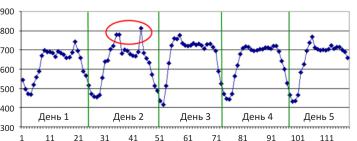
На рис. 4.3 приведен график временного ряда со случайными выбросами.
Рис. 4.3. Временной ряд с выбросами (помехами) в течение суток
На рисунке видно, что процессы, протекающие в течения дня, в среднем одинаковые. Однако в течение 2-го дня есть выбросы, носящие случайный характер. Если рассматривать фактические значения данного временного ряда до 2-го и ранее, а спрогнозировать значения на 3-й день, то очевидно, что выбросы 2-го дня не лучшим образом скажутся на прогнозе, если эти выбросы не сгладить.
Для сглаживания подобных пиков и применяется модель скользящего среднего, которая по сути дела, представляет собою простой фильтр низких частот.
На рис. 4.4 исходный временной ряд, а также модели скользящего среднего 2-го и 5-го порядка (MA(2), MA(5)). Заметно, что выбросы существенно сгладились, однако весь остальной профиль временного ряда MA существенно не отличается от исходного ряда, только несколько сдвинут по фазе. Такой сдвиг по фазе легко устранитьобычнымсдвигомзначенийряда.
59

Рис. 4.4. Временной ряд со средним скользящим 2-го и 5-го порядков
Одной из разновидностей моделей скользящего среднего является взвешенная модель (WMA (q)):
|
q |
|
i) |
|
|
|
w y(k |
|
|||
y(k) |
i 1 |
i |
|
, |
(4.11) |
|
q |
|
|||
|
|
wi |
|
|
|
|
|
i 1 |
|
|
|
где wi – коэффициенты веса.
Коэффициенты веса выбираются произвольно, но чаще всего выбираются следующим образом:
wi q i 1. |
(4.12) |
Такой выбор коэффициентов имеет следующее объяснение: на последующее прогнозируемое значение временного ряда существенное влияние оказывает ближайшее предыдущее значение ряда, а не значение, отстоящее на достаточно далеком интервале.
Таким образом, ясно, что скользящее среднее представляет собой фильтр, который позволяет сглаживать выбросы временного ряда, которые, в свою очередь, спрогнозировать достаточно сложно или вовсе невозможно.
60