

adambaev_avtomatty
.pdfМ.Ж. Адамбаев, Т.С. Малдыбаева
АВТОМАТТЫ БАСҚАРУ ТЕОРИЯСЫ
Өнеркәсіптік басқару объектілерін идентификациялау әдістері

Автоматты басқару теориясы
²АЗА²СТАН РЕСПУБЛИКАСЫ БIЛIМ Ж°НЕ ±ЫЛЫМ МИНИСТРЛIГI
².И. Ñәтбаев атындағы Қазақ ұлттық техникалық университеті
М.Ж. Адамбаев, Т.С. Малдыбаева
АВТОМАТТЫ БАСҚАРУ ТЕОРИЯСЫ
Өнеркәсіптік басқару объектілерін идентификациялау әдістері
Республикалық оқу-әдістемелік бірлестігі оқу құралы ретінде ұсынған
Алматы 2005
1

М.Д. Адамбаев, Т.С. Малдыбаева
ЖОК 62-501. 72:658.5
ББК 32.965 я 7
А 24 М.Ж. Адамбаев, Т.С. Малдыбаева. Автоматты басқару теориясы. Өнеркәсіптік басқару объектілерін идентификациялау әдістері. Îºó º½ðàëû. -Алматы: ²àçµÒÓ, 2005. 195 á.
ISBN 9965–758–11–5
Оºу º½ралында ¼ндiрiстi» кен-байыту ж¸не басºа да салаларында¹ы технологиялыº процестердi басºару ж¾йелерi мен ¼ндiрiстiк объектiлердi идентификациялау ¸дiстерiне байланысты с½раºтарды» ж¾йелендiрiлген түñiíiгi берiлген. Эксперимент н¸тижесiн ж¸не наºтылан¹ан инженерлiк ¸дiстердi ºолданып, объектiнi» экспериментальды екпiн ºисы¹ы негiзiнде объектiлердi идентификациялау ¸дiстерiне к¼п көңіл á¼ëiíãåí.
Îºó º½ðàëû «Электржетек ж¸не технологиялыº комплекстердi автоматтандыру» маманды¹ы студенттерiне арнал¹ан.
Сурет -42. °дебиеттер тiзiмi – 30 атау.
Пікір жазғандар: Н.Т. Исембергенов - техн. ғыл. докторы, профессор; Б.Д. Хисаров - техн. ғыл. канд., профессор; М.Б. Имандосова – техн. ғыл. канд., доцент.
ББК 32.965 я7
Қазақстан Республикасы Білім және ғылым министрлігінің 2005 жылғы жоспары бойынша басылды
A 2103000000 00( 05 )05
ISBN 9965–758–11–5 |
© ҚазҰТУ, 2005 |
2

Автоматты басқару теориясы
ÊIÐIÑÏÅ
Баºылау негiзiнде модельдердi алу мен оларды» ºасиеттерiн зерттеу, ¹ылымны» негiзгi мазм½ны болып табылады. Б½л модельдер азды-к¼птi формализмделген болуы м¾мкiн, бiраº оларды» барлы¹ы, кейбiр жалпы суретке байланыстыратын басты ерекшелiкке ие. Динамикалыº ж¾йенi» т¸ртiбiн баºылау бойынша, адекватты математикалыº модельдердi алу м¸селесiнi» шешiмi – идентификация теориясыны» п¸нi болып саналады. Áiçäi ºîðø¹àí îðòà – динамикалыº ж¾йелерден т½ратыíäûºòàí, идентификация ¸дiстерiн бiлу өте қажет деуге болады.
²азiргi кезде техника мен технологияны» т¾рлi салаларында басºару процесiне жо¹ар¹ы талаптар ºою - идентификацияның ма»ызды м¸селелерi болып саналады. Сåáåái, ìàòематикалыº модель жеткiлiктi д¸лдiлiгiмен белгiлi болмаса, ж¾йенi» жо¹ары сапалы басºарылуын ºамтамассыз ету мүмкін емес.
Ж¾йе сипаттамаларыны» идентификациясы, ж¾йенi басºару м¸селесiне кедергі áîëады. Егер ж¾йе идентификацияланба¹ан болса, оны басºару¹а болмайды. Процестi басºар¹ан¹а дейiн идентификация н¸тижесiн бiлу - оны» тарату тиiмдiлiгiне елеулi ¸сер етедi.
Принциптер мен олар¹а негiзделен т¾рлi операцияларды» тiзбегiнен º½рал¹ан объектiлер мен процестердi»
математикалыº модельдерiн |
àëó ¸äiñòåðií ºûñºàøà, əрі æ¾éåëi |
т¾рде ºарастыру - îºó |
º½ралыны» негізгі ìàºñàòû. |
Эксперименттi зерттеулердi» н¸тижесi бойынша, математикалыº модельдердi аныºтау ¸дiстерi, идентификация теориясыны» п¸нi болып саналады. Ж¾йе туралы аºпаратты» априорлы к¼лемiне ºарай, ке» ж¸не арнайлы ма¹ынада¹ы, идентификацияны» м¸селерiн ажыратады. Ке» ма¹ынада м¸селердi шешу кезiнде, априорлы аºпарат ма¹ынасыз немесе м¾лде болмайды. Ж¾йе ''ºара ж¸шiк'' т¾рiнде ½сынылады да, оны идентификациялау ¾шiн, модельдердi» тобын та»даумен, стационарлыºты, сызыºтыºты, т. б. ба¹алаумен байланысты бiрºатар ºосымша м¸селелердi шешу ºажет. ²азiргi уаºытта идентификация теориясы ке» ма¹ынада жеткiлiктi
3

М.Д. Адамбаев, Т.С. Малдыбаева
ºолданбалы пайдаланысºа ие бол¹ан жоº, өйткені ол ¸лi ºалыптасу кезе»iнде.
Арнаулы ма¹ынада идентификация м¸селесiн шешу кезiнде, о¹ан ºатысты модель тобы мен ж¾йе º½рылымы белгiлi деп саналады. Ж¾йе туралы априорлы аºпарат жеткiлiктi. Идентификация м¸селесiнi» м½ндай ºойылуы, жоспарлауды» наºты жа¹дайына с¸йкес келетіндіктен, инженерлiк т¸жiрибиеде кеңiнен ºолданылады. Идентификациялау теориясы мен ¸дiстерiне арнал¹ан к¼птеген ж½мыстар бар [1–5]. Қазiргi уаºытта ¸дебиетте идентификация, ¸детте, динамикалыº модельäåðäi àлуды» экспериментальды ¸дiстерiнен к¼рiнiс табады.
Осы оºу º½ралын дайындау кезiндегі авторлардың еңбегі технологиялыº процестер мен электржетектерiн басºаруды» автоматты ж¾йелерiн º½ру т¸жiрибесiнде көрінеді. Екiншi жа¹ынан, ºазiргi заман¹ы ¸дiстердi ºарастыраäû.
Материалды жазу барысында ¾éðåíген ¸дiстердi т¾сiндiретiн электржетектің басºару ж¾йелерi мен ¼íåðê¸ñiïòi» кен байыту ж¸не басºа да салаларында¹ы процестер идентификациясыны» мысалдары ке» пайдаланыл¹ан. Мұндағы мысалдарды» к¼бi сандыº н¸тиже алу¹а дейiнгі деңгейге дейін æåòiëдірілãåí.
4

Автоматты басқару теориясы
1. ´НЕРК°СIПТIК БАС²АРУ ОБЪЕКТIЛЕРIН ИДЕНТИФИКАЦИЯЛАУ
Жалпы ережелер
Өнеркəсіптік басқару жүйесінде обьектiлердi» динамикалыº ºасиеттерiн зерттеп, детерминизмнi» негiзгi с½раºтарына жауап беру керек. Я¹íè, áåëãiëi ûºïàë мен бастапºы кездегi белгiлi координаттар бойынша (бастапºы к¾й) кезектi уаºытта координаттарды» ¼згеруiн (к¾йдi» ¼згеруiн) алдын ала болжаған жөн (Гюйгенс-Адамар принципi). Ж¾йенi» анализi мен синтезiн дамыту ¾øií, басºару объектiлері айнымалыларыны» ¼зара байланыс те»деуiн бiлу ºажет.
Объектiлердi» статика ж¸не динамика те»деулерi кiрiс ыºпалды» (реттеушi, басºарушы) ж¸не шы¹ыс координаттар (реттелетiн, баскарылатын) арасында¹ы себеп-салдарлы т¸уелдiлiктi сипаттайды. Статика те»деуi - динамика те»деуiнi» жеке жа¹дайы болып табылады.
Те»деулердi º½руды» негiзi - физика мен химияны» мына за»дары: затты», энергияны» саºталынуы, гидроаэродинамика, электростатика, т. б. Б½л за»дарды технологиялыº объектiлердi суреттеудегi маºсаты - ба¹ытты ºолдану, жалпы те»деулердi беру: материалды а¹ын ж¸не ºор, затты араластыру кезiндегi масса тасымалдау, затты б¼лу кезiндегi масса тасымалдау, затты» фазалыº ж¸не химиялыº айналуы кезiндегi жылу тасымалдауы, т. б. Б½л те»деулерден: наºты объектiлердi», статиканы» ж¸не динамиканы» наºты те»деулерi шы¹ады.
Математикалыº суреттеуге д¸лелсiз ºолайсыздыººа талпынуды» ºажетi де жоº, себебi наºты д¸лдiк жоº, ол керек те емес. Те»деудi» д½рыс емес м¾шесi - ºате, ал артыº м¾шесi - ºатенi» жартысы. Негiзгi факторларды iздеудi ж¸не негiзгi емес факторларды есепке алмауды ¾йрену ºажет. Есепке алынба¹ан факторларды кездейсоº кедергілер ретiнде ºабылдау м¾мкiн, оларды есепке алмау, автоматты ж¾йелердi» ºабiлеттiлiгiмен аºталады. Мысалы, т½раºтал¹ан автоматты ж¾йелерде, ºарастырылатын орныºтылыº ºорлары, есепте ºабылдан¹ан номиналдылардан, объектiлердi» те»деу коэффициенттерiнi» ауытºуыны» пайда болуын қарастырады.
Автоматты ж¾йелердi есептеу кезiнде, объектiлердi бiрºатар арнайы сипаттамаларымен ба¹алайды: берiлiс функциясы, сатылы
5

М.Д. Адамбаев, Т.С. Малдыбаева
ауыспалы функция, импульстi ауыспалы функция, амплитудалы ж¸не фазалы жиiлiктiк сипаттамалары, логарифмдiк жиiлiктiк сипаттама, ке»ейтiлген жиiлiктiк сипаттама, т. б. Б½ларды» барлы¹ы, динамика те»деуiнен алынуы м¾мкiн.
Автоматтандыру объектiлерiнi» те»деуiн º½ру ¾шiн бiрiншiден, технологияны» негiзгi жаºтарын, аппараттарды» º½рылысын, процестi оптимальды ж¾ргiзу ºажеттiлiгi арқылы аныºталатын автоматтандыру талаптарын бiлу ºажет. Б½л, автоматты ж¾йелердi» º½рылымдыº контурын бейнелеуге м¾мкiндiк бередi. Сонымен ºатар, объектiде ºандай факторларды - кiрiс басºарылатын ыºпал деп, ал ºандай факторларды - шы¹ыс координаттары деп санау керек екенiн ж¸не ºандай факторларды - ºобалжу ыºпал¹а жатºызу¹а болатынын аныºтау¹а м¾мкiндiк бередi.
Кез келген технологиялыº процесс, жеке типтiк аппараттар т½рiнде орындалатын бiрºатар операциялардан т½рады. Сондыºтан, динамика анализi, т¾рлi технологиялыº процестер ¾шiн ортаº аппараттарды зерттеуден басталып, содан кейiн спецификалыº жа¹дайлар ºарастырылады.
1.1. Т¾рлi ¼ндiрiс ¾шiн ортаº аппараттар мен процестер динамикасыны» негiздерi
Т¾рлi технологиялыº процестерде жинаº, тасымалда¹ыш, араластыр¹ыштар, жылу айырбастауыштар сияºты агрегаттар жиi кездеседi.
Æèíຠ- материалдармен жабдыºтау¹а (аккумуляциялайтын, ½стайтын) ºабiлеттi кез келген жинаºтан к¼рiнiс табады. Араластырушы-жинаºта т¾рлi келтiрiлген материалдарды қосады. Оны» iшiндегi араластыру - бiр мезеттi немесе диффузиялы болып, араластыру болмауы да м¾мкiн. Жинаºта келтiрiлген ж¸не шы¹арыл¹ан а¹ынмен, онда¹ы материалдар ºорымен (к¾й координаттары) сипаттау жеткiлiктi, ал араластыр¹ыш ¾шiн б¼лек компоненттер концентрациясын бiлу ºажет.
Жылу айырбастаушы-жинаºта, бiрiншi кезекте материал температурасы мен жылу а¹ыны т½р. Б¼лу аппараттарында (материалды ºоспаларды» б¼лiнуi болатын жинаºтарда, º½рыл¹ы классификациясы – елек ж¸не сепараторлар, концентраттар мен ºалдыºтарды» флотациялыº б¼лiнiсi) к¾й координаттары, дайын ¼нiмнi» а¹ыны ж¸не оларда¹ы
6

Автоматты басқару теориясы
компоненттер концентрациясы болып табылады. Осы аппараттарды» барлы¹ында да динамиканы зерттеу ºажет.
1.1.1. Материалды а¹ын ж¸не ºор динамикасы
1.1-суретте к¼рсетiлген сусымалы материалдар¹а арнал¹ан бункер, пульпа немесе с½йыºтыººа арнал¹ан резервуарлар жиынты¹ы (жинаº) те»деуiнi» жалпы т¾рде º½ру ¸дiстемесiн ºарастырамыз.
|
|
1.1- сурет. Жинаº |
|
|
динамикасын аныºтау |
Æèíຠ|
ê¾éi |
¾ш айнымалы арқылы сипатталады: |
êåëòiðiëåòií |
à¹ûí (Q1); шы¹арылатын а¹ын (Q2) æ¸íå |
|
жинаºта¹ы материал |
ºîðû (Ì). Шы¹ынсыз ж½мыс iстейтiн |
|
æèíàқта¹ы материал саныны» ¼сiмi, D t óàºûòòà Q1 а¹ынмен ¸келiнген ж¸не Q2 а¹ынмен ¸кетiлген материалдар саныны» айырымына те», я¹ни:
DМ = Q × Dt - Q2 × Dt .
Òå»äåóäi» åêi á¼ëiãií äå D t-¹à á¼ëiï, øåêòі òүрiнде мынаны
аламыз: |
|
dM = Q1 – Q2. |
(1.1) |
dt
Аëûí¹àí материалды баланс деп аталатын те»деу – жинаº динамикасыны» те»деуi болады.
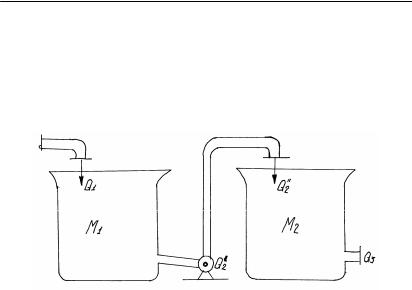
Бiрiншi жинаºта¹ы а¹ын - екiншi жинаººа келiп т¾скен, ал жинаºтарды» арасында материалдарды тасымалдау – конвейер
7
М.Д. Адамбаев, Т.С. Малдыбаева
немесе насоспен ж¾зеге асырыл¹ан. Осы æà¹äàé |
¾øií, åêi |
||
жинаºтан т½ратын ж¾йенi» те»деуiн º½рамыз (1.2-сурет). |
|||
°р жинаº к¾йi жо¹арыда аныºтал¹ан те»деумен |
|||
суреттеледi: |
|
||
|
dM 1 |
= Q1 - Q2' . |
(1.2) |
|
|
||
|
dt |
|
|
1.2-сурет. Екi жинаºтан º½рал¹ан ж¾йенi» динамика те»деуiн аныºтау
|
dM |
2 |
= Q '' - Q . |
(1.3) |
|
|
dt |
2 |
3 |
|
|
|
|
|
|
|
|
Осы те»деулер байланысын аныºтау ¾шiн, Q2' |
æ¸íå Q2'' |
||||
а¹ындарын байланыстыратын те»деулердi алу ºажет. Егер тасымалдау – т½раºты ¼нiмдiлiктi насосымен немесе конвейерiмен
ж¾зеге асырылса, онда бiрiншi жинаºтан шы¹атын барлыº Q2' à¹ûíû êåøiãіңкіреп, åêiíøi æèí຺à ò¾ñåäi. Êåøiãó t уаºыты жинаºтар арасында¹ы ºашыºтыº ж¸не конвейердi» лента бойымен немесе º½быр бойымен, материал ºоз¹алысыны»
жылдамды¹ымен аныºталады. Q2'' шамасы t óàºûòû |
êåçiíäå, |
1 |
|
t -t óàºûòû êåçiíäåãi Q2 а¹ынны» шамасына те»: |
|
Q2'' (t)= Q2' (t -t ). |
(1.4) |
Осыны есепке ала отырып, жинаº ж¾йесiнi» те»деуi мына т¾рге енедi:
8