

САМАРСКИЙ
ГОСУДАРСТВЕННЫЙ
АЭРОКОСМИЧЕСКИЙ
НИВЕРСИТЕТ
имени
академика С.
П. КОРОЛЕВА
по
дисциплине:
«Электрооборудование
летательных
аппаратов
и
силовых установок».
САМАРА
2005г.
Агрегаты
и режимы работы систем автоматического
управления. Учебное пособие Галкин
Е.Ф.,Шабалов П.Г. Самара: СГАУ,2005. Рассмотрено
назначение, состав, особенности
конструкции и эксплуатации агрегатов
систем автоматического управления и
её режимы работы. Предназначено
для студентов ВУЗов, обучающихся по
военно-учётным специальностям ВВС.
Самарский
государственный аэрокосмический
университет имени
академика С.П.Королёва ,2005 г.
Оглавление
ТЕМА
№ 16
СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЁТОМ
ЛЕТАТЕЛЬНЫХ
АППАРАТОВ (САУ ЛА)
ЛА
как объект управления. 5
Движение
ЛА в пространстве. 6 Системы
координат 7 Законы
управления. Классификация систем
управления полётом ЛА 10 Классификация
систем управления полётом ЛА. 13 Системы
ручного управления ЛА. 14
Системы
автоматизированного управления:
автоматы регулирования управления и
загрузки / ' АРУ и АРЗ /, демпферы
колебаний. Понятие об автоматах
устойчивости. 2.1
Автоматы «АРУ» и «АРЗ» 17 2.2
Автомат регулирования управления АРУ-
3В 19 2.3
Автомат регулирования загрузки . АРЗ
- I
- 1а 20 2.4
Автоматы демпфирования, 22 2.5.
Типовые демпферы колебаний 25 2.6
Автоматы устойчивости АУ - 105А и АУ -
128, 31 2.7.
Особенности эксплуатации самолетных
демпферов. 31
Место
САУ в комплексе АО ЛА. Назначение
Состав и основные элементы 33 Режимы
работы, законы управления САУ при
автоматическом
Управлении
39 Особенности
функционирования САУ при директорном
управлении 47 Особенности
эксплуатации и контроля САУ 49 Пилотажно-навигационные
комплексы 50 Основные
общие сведения о САУ и ПНК. 52 Классификация
САУ / по классам авиационных ЛА/:
55 Режимы
работы САУ можно разделить на несколько
групп 55 Блок
датчиков линейных ускорений БДЛУ-1-
3 56 Корректор
высоты KB
- 16 – I
59 Датчик
положения ручки ДПР - 23 и датчик
скоростного напора
ДНПСТ-0,6–I
61
4
САУ и автопилоты. 4.1
Автопилот АП - 155 - назначение, состав,
основные технические
данные
и функциональная
схема 62
5.Основные
сведения о системах автоматического
управления. 5.1.
Общая характеристика системы управления
самолётом 63 5.2.
Требования, предъявляемые к системе
управления. 64 5.3
Классификация систем управления 64 5.4.
Роль лётчика в системе управления
самолётом 65
6.1.
Структурно-функциональная и принципиальная
схемы прямого
управления 68 6.2.
Усиления на рычагах управления 69 6.3
Агрегаты системы прямого управления. 71 6.4
Схемы управления элевонами и
дифференциальным стабилизатором 79
7.1
Назначение и принципиальная схема
системы бустерного полуавтоматического
управления самолётом 80 7.2.
Гидравлический силовой привод 81 7.3.
Агрегаты, формирующие усилия на рычагах
управления. 84 7.4.
Устройства, изменяющие передаточное
отношение системы
управления
в полёте 89 7.5.
Автоматические устройства для улучшения
динамических
характеристик
самолёта 91 7.6.
Комплексные системы автоматического
управления 94
7.7.
Возможные неисправности системы прямого
управления и
механической
части системы непрямого управления. 100 7.8.
Пути повышения надёжности полуавтоматических
систем
управления
самолётом 102
ЛА
как объект управления.
Предметом
изучения данной темы являются средства
автоматического управления полётом и
средства автоматизации управления
полётом ЛА вертолётов и самолетов.
Однако, ввиду существенного различия
аэродинамических характеристик и
способов управления самолетов и
вертолетов, их системы автоматического
управления рассматриваются отдельно.
Потребность
в автоматизации управления полетом
самолета появилась вместе с появлением
самого самолета. Это объясняется
несовершенством конструкции первых
самолетов, которые обладали недостаточной
устойчивостью и управляемостью речь
идет о первых самолетах
Под
устойчивостью
ЛА понимаемся
его способность самостоятельно
возвращаться в первоначальное пoложение,
из которого он был выведен внешними
возмущающими факторами.
Управляемость
- это
способность ЛА изменять свое положение
в пространстве под действием управляющих
поверхностей /рулей/,
Улучшение
летных характеристик самолета и
вертолета возможно осуществи, или
за счет совершенствования его
аэродинамических свойств, или путем
использования дополнительных устройств
САУ полетом ЛА, — которые улучшают
естественные параметры ЛА,
Материал
данной темы предназначен для специалистов
по АО и содержит сведения только по
системам автоматического управления.
Ручное
управление первыми несовершенными
самолетами было затруднительным и для
его облегчения, а также для обеспечения
безопасности полетов летчики и
конструкторы создавали большое
количество различных приспособлений
от примитивных до весьма сложных.
Прообразом
современных CАУ
можно считать устройство, разработанное
американским инженером Сперри. Оно
представляло собой гиростабилизйрованную
платформу,а сигналы отклонения самолета
относительно этой платформы подавались
на электромагнитные муфты, которые
сочленяли соответствующие рулевые
поверхности с приводом от ветрянок,
устанавливаемых в потоке встречного
воздуха. Автоматическое управление
полетом самолета, оборудованного
указаньий системой, было продемонстрировано
в 1914 году. В России автоматическое
управление полетом ЛА
было осуществлено позже, однако, глубокие
теоретические проработки автоматического
управления ЛА и вообще поведения ЛА в
воздухе имелись, а в 1912 году профессором
Н.Е Жуковским были прочитаны лекции о
приспособлениях для придания аэроплану
автоматической устойчивости. Н.Е.
Жуковский разделил все устройства на
три группы: маятниковые, флюгерные и
гироскопические. В Московском университете
под руководством Жуковского был в это
время построен макет простейшего
стабилизатора, соединявшего эффект
флюгера и гироскопа.
Развитие
авиации шло в направлении увеличения
скорости полета, повышения характеристик
собственной устойчивости и управляемости
ЛА, появились самолеты с вполне
приемлемыми собственными летными
качествами и интерес к автоматизации
управления полетом ослаб, разработки
соответствующих автоматов прекратились.
Внимание к автоматизации управления
полетом ЛА вновь возросло в конце 20-х
годов, когда увеличились дальности
полета ЛА и потребовалось разгрузить
экипаж от длительных статических
нагрузок, связанных со стабилизацией
самолетов на маршруте. Появились
стабилизаторы курса, автоштурманы
и, наконец, автопилоты.
Первый
отечественный автопилот был создан в
1932 году. И имел марку АВП-I.
Управление самолетом осуществлялось
тремя самостоятельными автоматами
стабилизации с пневматическим приводом
рулей. Курсовой стабилизатор выдерживал
заданный курс, поперечный стабилизатор
- крен, а продольный стабилизировал
скорость полета за счет изменения угла
тангажа. АВП-I
имел массу около 200 кг. Перед Великой
Отечественной войной появились
усовершенствованные его модификации
АВП-3, АВП-10, АП-42.Использовались и другие
автопилоты.
Современные
реактивные сверхзвуковые самолеты
имеют настолько большой диапазон
изменения скорости и высоты полета,
что чисто конструктивными / аэродинамическими
/ способами не удается обеспечить
требуемые устойчивость и управляемость
для всех режимов полета. Поэтому
установка на самолете / вертолете /
средств автоматизации управления
полетом вновь стала настоятельной
необходимостью.
В
этом факте наглядно просматривается
закон диалектического развития
техники, когда на значительно более
высокой ступени ее развития возникли
требования, аналогичные с требованиями
для первых несовершенных самолетов.
Самолет
в полете и при движении по земле подвержен
упругим деформациям, вызванным
медленно и быстроменяющимися нагрузками.
Поэтому при рассмотрении полной
математической модели движения ЛА
указанные деформации необходимо
учитывать, а это значительно усложняет
анализ движения ЛА. Полная математическая
модель движения ЛА из-за ее сложности
используется лишь в задачах, требующих
весьма точного анализа движения. Основой
же для рассмотрения движения ЛА является
упрощенная модель, в которой ЛА
представляется абсолютно твердым
телом с неизменной массой. Наиболее
точно данная модель описывает движение
легких маневренных ЛА. Если считать
компоненты скорости ветра U
по
продольной /ОХ/, поперечной /0Z/
и вертикальной /ОУ/ осям ЛА, отклонения
органов управления и тягу силовой
установки заданными, то в рамках
стандартной модели атмосферы вектором
динамического и статического состояния
ЛД в пространстве X
будет являться совокупность величин:
X=(x
, y,
z,,
Wx,
Wу,
Wz
,,
,
γ, Н)
x,y,z
- составляющие угловой скорости ЛА
относительно осей ОХ , ОУ и 0Z;
Wx,y,z
- составляющие путевой скорости
летательного аппарата по строительным
осям ЛА /ОХ , ОУ , ОZ/;
,
,
γ, Н -
соответственно угол курса, тангажа,
крена и высоты полета ЛА.
Движение
ЛА в пространстве можно в зависимости
от поставленных задач рассматривать
в различных системах координат. ГОСТ
20058-80 предусматривает 12 таких систем
координат. Наиболее часто используют
следующие из них:
1.
нормальную земную 00Х0УоZо
- /неподвижная/;
2.
нормальную ОХоУоZ0
3.
связанную ОХ1Y1Z1
'
4.
скоростную ОХУZ;
5.
траекторную ОХ1У1Z1
Последние
три подвижные
I.
НОРМЛЬНАЯ ЗЕМНАЯ СИСТЕМА КООРДИНАТ
В этой
системе определяется положение центра
масс ЛА. За начало координат выбирают
место, относительно которого требуется
знать положение ЛА /аэродром взлета
или посадки, пункт наведения и др/ Ось
О0У0
направлена вверх по местной вертикали,
а оси О0X0
и О0Z0
расположены в плоскости горизонта и
направлены в соответствии с задачей
/О0Х0
часто направляют на Север /:
Рис
1.1
II.
НОРМАЛЬНАЯ СИСТЕМА КООРДИНАТ
ОХ0У0Zо
-подвижная с началом "О" в центре
масс ЛА. Ось ОУо направлена вверх по
местной
вертикали направление осей ОX0
и ОZ0
выбираютя в соответствии с задачей.
Как правило ось 0X0
направляют на Север,a
ОZ9
-на Восток,
III.
СВЯЗАННАЯ СИСТЕМА КООРДИНАТ
ОХ1У1Z1
- подвижная с началом в центре масс ЛА,
ось ОУ направлена вверх перпендикулярно
поперечной плоскости симметрии ЛА.
Ось ОХ1
направлена по продольной оси ЛА, а 0Z1-в
сторону правого крыла. Взаимное
расположение связанной и нормальной
систем координат определяется углами
тангажа -,
крена- γ
и рыскания
-
;
Рис
1.2 Связанная
система координат
Переход
от ориентации нормальной системы к
ориентации связанной осуществляется
последовательными поворотами:
на
угол
вокруг оси ОУо ;
на
угол
вокруг оси OZ1
;
на
угол γ
вокруг оси ОХ1
С
учетом введенных обозначений
кинематические уравнения вращения
самолета относительно центра масс в
связанной системе координат;
Проекции
x1,
y1,
z1
измеряются датчиками ДУС,
IV
СКОРОСТНАЯ СИСТЕМА КООРДИНАТ 0XУZ
- подвижная с началом «О»
в центре
масс ЛА. Ось ОХ совпадает по направлению
с вектором воздушной скорости V,
ось ОУ лежит в вертикальной плоскости
-- симкетрии ЛА. и направлена вверх, ось
0Z
образует с ОХ и ОУ правую систему
косрдинат. Взаимное расположение
скоростной системы
координаг
относительно связанной характеризуется
аэродинамическими углами
и
/углом атаки и углом скольжения
соответственно/:
Рис
1.3
-
угол между продольной осью ЛА и проекцией
вектора воздушной скорости У на
продольную ось симметрии ЛА, ос вызывает
появление подъемной аэродинамической
силы ЛА У
-
угол между вектором V
и вертикальной плоскостью симметрии
ЛА ,
вызывает появление боковой аэродинамической
силы Z
Рис
1.4
V.
ТРАЕКТОРНАЯ СИСТЕМА КООРДИНАТ ОХтУтZт
-подвижная с началом О в центре масс
ЛА, Ось ОХ
ОХ1У1Zт
совпадает по направлению с вектором
путевой скорости W=V+U
, ось ОYт
лежит в вертикалькой
плоскости симметрии ЛА и направлена
вверх, а ось ОZт
образует с ОУт
и ОXт
правую систему координат. Взаимное
расположение нормальной системы
координат ОX0У0Z0
и траекторной ОXтУтZт
характеризуется утлом наклона траектории
и путевым утлом :
Таким
образом,
- угол между плоскостью горизонта и
вектором путевой скорости W
-
угол между проекцией вектора путевой
скорости W
на плоскость горизонтами направлением
OX0
/как правило ОХ0
направлена на север /.,
При
отсутствии ветра траекторная система
координат ОХТУтZт
совпадает со скоростной ОХУZ.
В этом случае угол наклона траектории
можно еще определить как =-.
Последним выражением часто пользуются
и при небольших значениях U
ветра или при
значительных превышениях воздушной
скорости V
над значением U
ветра.
С
учетом расомотренных систем координат
можно отметить что положение ЛА
относительно Земли_ характеризуется
углами ,γ,,
относительно воздушной скорости V
- углами
и ,
a
путевая скорость связана со значениями
и .
Угловые
координаты ЛА в пространстве определяют
в конечном счете, и траекторию движения
центра масс. Координаты могут меняться
как под действием внешних возмущений,
так и в результате преднамеренные
действий летчика в процессе управления
ЛА. В продольном движении самолет
управляется рулем высоты или подвижным
стабилизатором или элевонами, В боковом
движении - элеронами, элевонами и
стабилизатором при отклонении их правой
и левой частей в противоположном
направлении, а также рулем направления.
Элевонами называют управляющие
поверхности, 'подобные элеронам, но
значительно большие и отклоняющиеся
как в одном направлении одновременно,
так и в противоположных направлениях.
Обычно
элевоны устанавливаются на самолетах
с треугольным крылом, не имеющих
стабилизатора. Кроме того на самолетах
с изменяемой геометрией крыла вместо
элеронов могут применяться интерцепторы
/прерыватели потока/,которые
устанавливаются на верхней поверхности
плоскостей крыла примерно в средней
их части. При выпуске интерцепторов
нарушается характер обтекания крыла
потоком воздуха и происходит изменение
его подъемной силы У , Если, например,
выпустить интерцепторы на левой
плоскости крыла, то подъемная сила
левой плоскости за счет торможения
воздуха уменьшится, в то время как
подъёмная сила правой плоскости не
меняется,
В
результате возникнет момент относительно
продольной оси самолета влево и появится
левый крен (γ<0)
1.4.
Законы управления. Классификация систем
управления полётом ЛА
Поведение
ЛА в воздухе характеризуется его
устойчивостью и управляемостью.
Управление
же ЛА подразделяется на управление "в
большом" и управление "в малом".
При "большом" управлении программа
движения ЛА задаётся в основном
относительно медленными перемещениями
рычагов управления в широких пределах.
После задания программы производится
её выдерживание посредством контроля
движения ЛА и малых перестановок органов
управления ‑‑ это управление "в
малом".
Исторически
автоматизация управления ЛА сначала
развивалась применительно к управлению
"в малом" и до настоящего времени
большинство
систем осуществляет отработку задающих
воз действий именно "в малом". Это
объясняется чрезвычайно высоким
требуемым уровнем надежности автоматики
пилотирования, которому техника невсегда
удовлетворяет.
Управление
полетом ЛА осуществляется по определенным
законам управления. Под законом
управления
понимается математическое выражение,
определяющее связь между отклонением
управляющего органа ЛА и управляющими
сигналами, рассмотрим наиболее простой
случай управления полетом самолота-
стабилизацию его положение по углу
тангажа .
Пусть по каким либо причинам началось
самопроизвольное отклонение самолета
по углу тангажа от заданного значения
=0.
Допустим,
что система управления самолетом
реагирует только на величину угла
отклонения:
где
в
- отклонение pyля
высоты;
в
- угол тангажа
К
в - коэффициент
пропорциональности передаточное число
между отклонением
руля и углом
Выражение
является
законом управления по отклонению.
В соответствии с этим законом
пропорционально изменению угла тангажа
будет отклоняться руль высоты в
направлении создания момента, стремящегося
вернуть ЛA
в первоначальное положение.
Из-за
наличия сил инерции самолёт "проскакивает"
исходное положение и далее процесс
повторяется с затуханием /для устойчивого
самолета/
Рис1.5
изменению угла тангажа устойчивого
самаолёта
Величина
Для
улучшения качества переходного процесса
в закон вводят сигнал по угловой скорости
– в данном случае вокруг поперечной
оси OZ1
где
/смотри
16,2/ и т.к. V
изменяется по синусоидальному закону,
то изменения
Z
будут запаздывать за изменениями V
обеспечивал
тем самым введение в закон управления
демпфирующего
сигнала
-
Z
Рис
1.6
максимальна
и наоборот, что и обеспечивает снижение
перерегулирования,т.е. демпфирование.
Подбирая
соотношение сигналов по углу
и W
Z
, можно получить желаемое качество
переходного процесса, включая и
апериодический подход самолета к
заданному положению. Закон управления,
включающий сигналы по углу и по
скорости изменения угла, можно считать
минимально необходимым для получения
качественного переходного процесса
при управлении самолетом.
Однако
при управлении самолетов каналы
автопилота /соответственно по трем
осям ЛА/ не являются автономными , т.к,
между ними имеются перекрестные связи,
точнее для большего эффекта управления
эти связи необходимо создавать.
Так,
например, при крене самолета вертикальная
составляющая подъёмной силы V
не будет уравновешивать массу самолета,
и начнётся потеря высоты. Чтобы этого
не произошло, необходимо отклонить
руль высоты вверх, т.е. в- канал автопилота
управляющий углом
необходимо подать сигнал по углу крена.
Следует отметить, что снижение
высоты, происходит как при правых кренах
γ<0
, так и при левых γ>0
а это
значит, что сигнал крена нужно подавать
всегда положительным -
Кроме
того, при крене самолет стремится в
сторону опущенного крыла. Устранить
скольжение можно подачей, сигнала по
углу крена в канал руля направления :
При
отклонении руля поворота в плоском
развороте самолета из-за большей
скорости внешнего крыла на нём появляется
приращение подъёмной силы, вызывающее
кренящий момент. Данный момент парируется
за счет сигнала, подаваемого из канала
направления в канал крена.
Если
автопилот выполняет функцию, стабилизации
высоты полета, а это реализуется всеми
современными автопилотами, то в канал
тангажа подаётся сигнал отклонения от
заданной высоты;
Приведённые
законы управления не являются
обязательными для всех автопилотов и
режимов полета. В законах управления
могут -отсутствовать некоторые члены,
а могут быть введены и неуказанные
выше сигналы: по интегралу от
отклонения какого-либо углового или
линейного параметра, по перегрузке
и другим параметрам. Если не требуется
стабилизировать угловое положение
самолета, а стоит задача ликвидации
его колебания, то законы управления
могут содержать только сигналы по
угловым скоростям вращения самолёта
относительно его осей
Подобные
законы управления имеют специальные
устройства автоматического
демпфирования колебаний ЛА, называемые
демпферами. В режиме только демпфирования
могут работать и автопилоты.
В
зависимости от степени автоматизации
можно выделить следующие системы
управления:
Ручные
- когда летчик-управляет ЛА- с помощью
рулей, имеющие жёсткую связь с ручкой
управления. При этом лётчик, руководствуется
показаниями обычных приборов и
личными ощущениями,.
Автоматизированные.
Эти системы не освобождают лётчика от
непосредственного ручного воздействия
на рулевые органы ЛА, но они обеспечивают
единообразное управление на всех
режимах полёта /автоматы регулирования
управления АРУ и автоматы регулирования
загрузки ручки управления самолётом
АРЗ/ или без участия лётчика устраняют
самопроизвольные колебания ЛА, улучшая
его характеристики устойчивости и
управляемости /демпферы, автоматы
устойчивости/.
Полуавтоматические
командные или директорные. В
случае использования директорного
управления лётчик освобождается
от необходимости производить расчёты
траектории полётa,
т.к на специальные приборы автоматически
выдаются команды выполняя
которые летчик будет вести ЛА по
заданной траектории в данном случае
лётчик является звеном в контуре
системы управления, но управляет ЛА
по-прежнему вручную.
Автоматические.
Эти системы выполняют функции управления
угловыми координатами и стабилизации
траектории движения цнтра масс ЛА,
освобождая лётчика от необходимости
непосредственного воздействия на
рули. Такие системы получили название
автопилотов. При включённом автопилоте
роль лётчика сводится к заданию
необходимых режимов полета и контролю
за их реализацией.
В
последнее время самолётные автопилоты
перестали быть автономными системами
управления полётом они стали входить
составной частью в системы автоматического
управления -/САУ/ и пилотажно-навигационные
комплексы / ПНК/, которые объединяет
всё курсовое, навигационное, командное
и пилотажное оборудование |ЛА
САУ
и ПНК обеспечивают фактически полную
автоматизацию полёта ЛА и его боевого
применения. Однако, наряду с высокой
степенью автоматизации управления
современными ЛА возможность переход
на ручное; управление является
обязательным условием при создании
всех типов ЛA,
имеющих лётные экипажи. Причины этому
следующие:
во-первых,
ручное управление играет роль основного
в аварийной
обстановке, т,е, является резервным
при отказах автоматических систем
управления;
во-вторых
ручное управление используется на
критических режимах /например на
взлёте и посадке/ и в таких ситуациях
где применение существующих автоматических
систем; не рекомендуется или запрещено
В
явном виде системы ручного управления
применяются на поршневых лёгких
самолётах, где шарнирные моменты Мш,
возникающие при отклонении рулей от
действия скоростного напора, могут
преодолеваться мускульным усилием
лётчика.
В
этом случае ручка управления самолетом
связанас рулём тягами- жёсткой или
тросовой. Угол отклоненй рулевой
поверхности в
пропорционален. отклонению, ручки
управления р
Рис
1.7
Каждому
отклонению руля высоты / в данном случае/
будет соответствовать перегрузка
возникающая при манёвре самолёта. При
ручном управлении пропорциональность
между перегрузкой и отклонением ручки
управления самолётом достигается за
счет возрастания шарнирного ^ момента
Мш
при увеличении в.
То есть для создания большей перегрузки
при манёвре лётчик должен увеличить
усилие, прикладываемое к ручке управления.
Если
в полёте на самолёт действуют постоянный
момент, отклоняющий самолет от
прямолинейной траектории, то лётчик
должен для парирования этого момента
держать руль /FB/
постоянно отклонённым, прикладывая
усилие к ручке. Это утомительно и
усложняет пилотирование.
Для
снятия нагрузки с ручки управления при
чисто ручном / управлении используется
аэродинамический триммер, представляющий
собой дополнительную рулевую поверхность
на задней части руля, При отклонённом
положении руля /и ручки управления
самолётом/ лётчик отклоняет триммер в
соответствующем направлении до тех
пор, пока шарнирный момент руля Мш
=Yв
Lв
не уравновесится моментом триммера
Мт=Yт
*LТ
здесь Yв
- равнодействующие аэродинамических
сил руля высоты РВ и триммера Т, Lв
и Lт
- плечи приложения этих f
сил относительно оси вращения триммера
и руля высоты Момент наступления
равенства Мт=Мш
лётчик почувствует по отсутствию
сопротивления ручки управления,
находящейся попрежнену в отклоненном
положении.
Привод
триммера осуществляется дистанционным
механизмом /электромеханизмом/, который
управляется от кнопки "триммер"
на ручке управления самолетом.
Современные
ЛА имеют относительно большую массу и
большие скорости полёта и поэтому для
управления ЛА требуется создавать
моменты, непосильные для человека
/усилия |на привод рулей достигают
нескольких тонн/
В
связи с указанным под ручным управлением
в современной трактовке понимается
следующая схема: лётчик непосредственно
отклоняет" не рулевые поверхности
а управляющий золотник гидроусилителя,
который открывает доступ гидросмеси,
находящейся под высоким давлением /до
240кгс/см2/
рабочий цилиндр. Поршень рабочего
цилиндра через шток отклоняет руль /в
данном случае стабилизатор С/. По мере
движения рабочего штока происходит
перемещение точки "О" и при
неподвижной точке "0 " шток
управляющего золотника перемещается
перекрывая канал поступления гидросмеси
в рабочий цилиндр. Этим реализуется
жёсткая отрицательная обратная связь
и обеспечивается пропорциональность
между отклонением ручки управления и
отклонением рулевой поверхности.
Рис
1.8
Недостаток
рассмотренной системы - ее необратимость,
- летчик не чувствует шарнирного
момента на руле, а при освобождении
ручки управления от усилия она не
возвращается самодеятельно в исходное
положение. Такая схема управления может
привести к созданию недопустимых
перегрузок ЛА и делает пилотирование
неестественным. .
С
целью ликвидации указанных недостатков
в систему управления включается
загрузочный механизм МЗ (пружина),
связанный с механизмом триммерного
эффекта (МТЭ)). Летчик, отклоняя ручку
управления, преодолевает сопротивление
пружины ЗМ, имитирующего шарнирный
момент. При необходимости снятия
нагрузки с ручки управления, когда,
например, на самолет действует постоянный
момент, летчик кнопкой "триммер"
включает МТЭ, смещая тем самым
нейтраль загрузочной пружины. Этим
достигается идентичность чисто ручного
управления и управления с использованием
необратимых гидроусилителей (бустеров).
Ранее
отмечалось, что системы автоматизированного
«управления
облегчает пилотирование ЛА лётчиком
путём обеспечения единообразия
пилотирования / АРУ и АРЗ /,а также путём
улучшения характеристик устойчивости
и управляемости ЛА / демпферы и автоматы
устойчивости /.
Необходимость
в создании систем единообразия
пилотирования вызвана тем, что в
зависимости от скорости V
и высоты Н полёта весьма значительно
изменяются диапазоны изменения
аэродинамических характеристик ЛА.
Самолёт как бы по-разному "слушается"
рулей на различных V
и Н - это объясняется наличием
прямопропорциональной зависимости
между эффективностью действия рулевой
поверхности и скоростным напором
воздуха /q/
,обтекающего самолёт. Очевидно; что при
больших значениях скоростного напора
для
совершения манёвра можно рулевую
поверхность отклонять на меньший угол
/т.к. подъёмная сила руля тем больше,
чем больше скоростной напор воздуха
q.
То есть лётчик постоянно должен
"подстраиваться" под изменяющуюся
эффективность рулей и для совершения
одного и того же манёвра\ на разных V
и Н соответственно на разные углы
отклонять ручку управления самолётом,
что создаёт дополнительные трудности
пи- » дотированию. Единообразие
пилотирования можно обеспечить двумя
способами:
-
путём изменения передаточного числа
от ручки управления к
рулю в зависимости от V
и Н
-
путём изменения загрузки ручки управления
в зависимости от V
и H.
Последний
способ создаёт у лётчика иллюзию наличия
на ручке управления значения текущего
шарнирного момента на руле. Способы
применяются как в отдельности, так и
вместе на одном ЛА, Однако во всех
случаях система единообразия пилотирования
включает лишь в продольный канал /
каналы стабилизатора/ т.к в этом канале
перегрузки / ny/
при маневрировании в несколько раз
превышают допустимые перегрузки по
продольной оси / nx
/ и поперечной оси / nz
/. I
Наилучшая
управляемость обеспечивается в том
случае если при приложении определённого
усилия на ручку управления возникает
определённая и независящая от
режима
полёта нормальная перегрузка. т.е.
соблюдается:
в
- отклонение
руля высоты / стабилизатора /;
X
- отклонение ручки управления ;
или
передаточное число и жёсткость
одновременно . Большинство
"автоматов" АРУ изменяет одновременно
передаточное число к рулю и загрузку
ручки, а автоматы АРЗ - только загрузку
ручки управления. Иногда для обеспечения
большего единообразия пилотирования
на одном и том же самолете устанавливают
современно АРУ и АРЗ.
АРУ
- 3В предназначен для обеспечения
единообразия пилотирование самолёта
- истребителя при различных значениях
V
и Н. Единообразие '
достигается путём изменения с помощью
исполнительного механизма /ИМ/
передаточного
числа от ручки управления к рулю и
изменения загрузки ручки.
Исполнительный
механизм управляется блоком управления
/ БУ /,для которого входными информационными
сигналами являются текущие значения
V
и Н. Схема основных соединений АРУ-ЗВ.
Рис
2.1
Программа
регулирования АРУ-ЗВ строится в
зависимости
от скорости полёта V
с коррекцией по высоте Н:
При
перемещении штока ИМ изменяется величина
плеча на бустер L/
стабилизатор /,а также плечо на загрузочный
механизм Lз
.
Причем
при возрастании LБ
плечо L3
уменьшается и наоборот. Максимальная
величина плеча LБ
= 100 мм, Lз=
90мм,а минимальные значения: LБ
=5Омм и L3
= 90мм. Из графика видно, что наибольшему
значению LБ,
соответствует скорость полота 500 км/час
или высота
полета 10 км. Коррекция по высоте в данном
случав как бы " подпирает" график
снизу, т, е. в зависимости от роста Н
нижнее значение LБ
при регулировании по скорости возрастает
и на Н > 10 км LБ=LБmax
и не зависит от скорости.
Рис
2.2
При
отказе автоматической части АРУ / отказе
блока управления / лётчик имеет
возможность вручную с помощью
соответствующего переключателя
управлять ИМ, устанавливая требуемое
значение LБ
и Lз
в зависимости от режима полёта.
Помимо
АРУ-ЗВ на ЛА нашли применение и другие
системы - АРУ-9, АРУ- II
и др. Отличие данных систем от АРУ - 3В
заключается в большей точности
регулирования, больше надёжности и
несколько иной программы регулирования
/ другими значениями максимальных и
минимальных LБ
и Л3
, а также крайними значениями V
и Н,
Системы
АРУ преимущественно устанавливают на
самолёты с неизменяемой геометрией
крыла, исключение составляет лишь АРУ
- II.
Указанное ограничение по использованию
АРУ связано со значительными изменениями
аэродинамических характеристик самолёта
при изменении угла стреловидности
крыла, т.е, со значительным усложнением
программы регулирования.
Данный
автомат предназначен, также как и
системы АРУ, для обеспечения единообразия
пилотирования, но в отличие от последних
достигается это только путём изменения
величины загрузки ручки управления
/ т.е. путём изменения только Lз
Рис
2.2 Блок -
схема АРЗ - I.
- 1а
Сигналами
управления для АРЗ-I-I
a
также, как и для АРУ, являются значения
скорости / Рп
/ и высоты / Рст
/ полёта. Дополнительно предусмотрена
коррекция по углу стреловидности крыла
.
Кинематика
включения АРЗ- I
- 1а:
Рис
2.3
Из
рисунка видно, что чем больше плечо и
, тем больше загружена ручка управления,
Полностью программа регулирования
имеет вид;
Рис
2.4
Программа
АРЗ-I-Ia
предусматривает коррекцию по высоте
лишь примерно до половины зависимости
L3
= f
(V)
и таким образом на высотах, больших
Нmax
/ около 10 км /,' плечо LЗ
изменяется при изменениях скорости
, - в диапазоне / 60 - 79 / мм. Другое отличие
от программы АРУ - коррекция по углу
стреловидности крыла .
При установке крыла во взлётно--
посадочное / выпущенное / положение
шток исполнительного механизма
принудительно устанавливается также
во взлётно - посадочное положение и
далее не зависит от значений скорости
и высоты. Плечо на ЗМ при этом соответствует
взлётно – посадочном положению/,
Lвзл
= 79 мм,
Автоматы
АРЗ устанавливаются как на самолёты с
изменяемой стреловидностью
крыла, так и на
самолёты с не изменяемой стреловидностью
крыла.
Недостатком систем АРЗ, изменяющих
только загрузку ручки управления,
является необходимость в создании!
довольно большого диапазона изменения
градиента усилия на ручке для обеспечения
требуемого единообразия пилотирования.
А это может привести к недопустимо
большим нагрузкам на ручке при полётах
сo
значительными скоростями ,т.е, к
затруднению пилотирования.
Подводя
итог вопросу, отметим, что автоматы АРУ
более приемлемы , чем автоматы АРЗ, т.к,
единообразие; пилотирования для АРУ
.достигается при сравнительно, неболбших
диапазонах изменений градиентов усилий
и коэффициентов передачи от ручки к
бустеру. И АРУ и АРЗ устанавливаются
только в канале стабилизатора и
обеспечивают улучшение только
характеристик продольной управляемости,
не улучшая устойчивости ЛА,
.Задачи
автоматических средств улучшения
устойчивости и управляемости не
ограничиваются стабилизацией статических
характеристик системы ручного управления
- градиентов перемещения и усилия
/обеспечивалось АРУ и АРЗ/. В их функции
входит также улучшение динамических
свойств контуров ручного управления.
Автоматы демпфирования предназначены
- для снижения степени колебательности
реакции ЛА на отклонение рычагов
управления и уменьшения длительности
переходных процессов управления
продольным и боковым угловыми движениями.
Рассмотрим
возникновение демпфирующих моментов
при вращении, например, относительно
продольной оси. Пусть, под действием
управляющего или- внешнего момента
появилась угловая скорость, вращения
X..
В результате левая и правая плоскости
крыла как бы получат , вертикальные
скорости V
Рис
2.5
Появление
Vy
вызовет изменение направления и величины
вектора истинной скорости V0
изменится угол. атаки, левой и правoй
плоскости, что в свою очередь, приведёт
к увеличению подъёмной силы одной,
плоскости на Y
и уменьшению подъёмной силы другой
плоскости ,так же на Y.
Возникнет собственный демпфирующий
момент
Рис
2.6
На
многих режимах полёта /особенно на
больших высотах/ этот момент мал и
собственного демпфирования недостаточно.
Как следствие, при отклонении рулей
или действии внешних возмущений
возникают, угловые
колебания
самолёта. Периодичность колебаний
такова, что лётчик не успевает парировать
юс отклонением рулей и даже наоборот
- запаздывание действий лётчика ещё
больше раскачивает самолёт. Пилотирование
в подобных условиях становится трудным,
а иногда и невозможным.
В
данной ситуации приемлемые характеристики
устойчивости могут обеспечить только
быстродействующие втоматы устойчивости,
которые отклоняют рули на угол,
пропорциональный угловой скорости
вращения самолёта относительно
соответствующей оси. Создаваемый при
этом момент руля точно также, как и
момент естественного демпфирования,
направлен противоположно угловой
скорости вращения и парирует это
вращение. /Собственная частота контура
демпфирования должна быть в 7 - 10 раз
выше частоты самолёта по данному
каналу/,
Автоматы
демпфирования представляют собой
автономные устройства - демпферы или
же входят как составная часть в САУ ЛА
и автопилоты
Типовой
демпфер включает в свой состав измеритель
угловой скорости / датчик угловой
скорости-ДУС /,корректор передаточного
числа /КПЧ/ или датчик скоростного
напора / ЖН /, а также сервопривод.
Наибольшее распространение получил
сервопривод! состоящий из электрического
рулевого агрегата типа РАУ - 107/ раздвижная
тяга/ , релейного усилителя РУБ и
элементов жесткой обратной связи.
Рис
2.7 Структурная
схема включения демпфера:
Усилительный
контур демпфера охвачен жёсткой обратной
связью ЖОС и скоростной обратной связью
СОС /по скорости вращения электродвигателя
РАУ /.
Наличие
датчика ДСН в демпферах Объясняется
большой зависимостью характеристик
устойчивости и управляемости от режимов
полёта ЛА / V
и Н/. Сигнал по угловой скорости
корректируется в зависимости от значения
скоростного напора q
Закон,
управления демпферов;
демпфер
крена: демпфер рыскания, демпфер курса
-
углы отклонения руля высоты,
элеронов и руля направления рулевыми
агрегатами РАУ.
передаточные
числа .демпферов
-
угловые скорости самолёта, относительно
связанных
осей 0Z,
ОX,
ОУ.
Переходные
функции самолёта при отклонении,
например, руля высоты выглядят следующим
образом:
Рис
2.8
Снижение
установившегося значения объясняется
наличием в демпфере жёсткой обратной
связи, to,как
известно, вносит статическую ошибку в
регулирование.
На
ЛА нашли применение различные типы
демпферов. Наиболее часто применяются:
Д
- 2К - ПО - двухканальный, - в канале руля
высоты и руля направления;
ДТ
- 128 - одноканальный в канале руля высоты;
Д-2К-115-
двухканальный в канале элеронов и в
канале руля
направления.
Д-ЗК-IIО-
3х
- канальный, обеспечивает демпфирование
по крену.
Структурные
схемы демпферов, во многом одинаковы,
а их основные элементы унифицированы.
Схема кратко рассмотренного выше
демпфера содержит 4 таких элемента -
ДУС, РАУ, РУБЖЕ
ДУС
, датчик угловой скорости. Состоит из
двухстепенного гироскопа собственно
датчика угловой скорости 6 и
потенциометрического узла, с которого
снимаются сигналы, пропорциональные
U
. Датчики ДУС имеют рабочий диапазон
измерения от 0,1 до 18 КУБ. Релейно
усилительный блок. РУБ представляет
собой I
3х
- каскадный усилитель. Первый каскад
усиления представляет собой магнитный
усилитель, второй каскад - релейный
усилитель на поляризованном реле и
третий каскад - релейный усилитель на
силовом реле типа PC
– 3.
РАУ
-рулевой агрегат управления. В большинстве
самолётных демпферов применяются РАУ
- 107.
Они
представляют собой электромеханическую
раздвижную тягу с двигателем постоянного
тока;
Рис
2.8 РАУ - 107
где:
I
- электродвигатель;
2
- редуктор; ,
3
- ходовой винт;
4
- выдвижной шток;
5
- концевые выключатели крайних положений
штока<
6
- центрирующее ламельное устройство;
7
- потенциометр обратной связи;
i
8
- электромагнитная муфта - стопор;
9
- корпус,
Основные
технические данные РАУ – 107:
-
скорость движения штока …………………………………….8мм/сек|
-
номинальная нагрузка на штоке
…………………………….4 кГс1
;
-
ход штока: - по концевым выключателям
…………………151мм
-
по механическим упорам …………………….18
мм при этом отклонения руля не превышают
15 25 % от
максимальной величины)
-разрушающее
усилие на шток …………………………1600 кГс,
ДСН
- датчик скоростного напора.
ДСН представляет собой простейший
датчик скоростного напора. Чувствительный
элемент ДCH
- это манометрическая коробка, в которую
подаётся Р полное, в корпус же датчика
поступает Р статическое. Подвижный
центр манометрической коробки связан
с движком выходного потенциометра.
Рис
2.9 Схема
включения ДСН;
В
приведённой схеме Rб
и R4
- подстроечные, a
ОУруб - управляющая обмотка магнитного
усилителя РУБ. В - соответственно
потенциометры
выходных узлов ДСН и ДУС, / R9
/ f
потенциометр жесткой обратной связи
по перемещению штока РАУ\
Работу
демпферов рассмотрим на примере демпфера
Д - 2К - НО.
Законы
управления Д - 2К - НО:
В
состав Д - 2К - НО вхдят;
I
- ДУС-
Т;
5. РАУ -
Т;
2.
ДУС - Р; б. РАУ - Р
3.
РУБ - Т; 7. ДСН ;
4.
РУЕ - Р; 8. Фп - 18О - фильтр радиопомех.
Ввиду
идентичности каналов демпфера далее
будем рассматривать
его работу по каналу тангажа.
При
включении АЗС " Домпфер" начинается
режим подготовки срабатывают релеР5 и
подаёт трёхфазное напряжение 36В 400Гц
на электродвигатель гироскопа ДУС;
реле Р6 включаем питание на обмотку
независимого возбуждения электродвигателя
и на электромагнит стопор РАУ; при этом
получает питание мостовая схема
сформирования управляющего сигнала,
состоящая из потенциометров R6,
R7,
R8,
R9,
RIO,
и рабочие обмотки магнитного усилителя
РУВ; через нормально-замкнутые контакты
R7
подаётся напряжение на ламельное
устройство / ЛУ / центрирования штока
РАУ 107.
Если
шток РАУ не находится в среднем положении,
то щётка ламельного устройства
смещена на одну из токовёдущих ламелей
и через неё подаётся питание на обмотку
реле РЗ или JP4.
При срабатывании одного из этих реле
включается напряжение на якорь
электродвигателя РАУ. Направление
его вращения определяется начальным
смещением щётки ламельного устройства,
но всегда обеспечивает движение штока
к среднему положению до момента установки
щётки на изоляционный промежуток.
После
центрирования штока РАУ и разгона
ротора гироскопа ДУС /через 1-2 минуты
после включения АЗС " Демпфер" /
заканчивается режим подготовки.
В
рабочий режим каналы демпфера переводится
выключателем "Тангаж" и "Рысканье"
/последний на схеме не показан/, При
замыкании цепи выключателем "Тангаж"
срабатывает peлe
P7
и подаёт питание на релейную часть
усилителя РУБ, одновременно снимая
напряжение с ламельного устройства
РАУ и контактов реле РЗ Р4. С этого
момента демпфер осуществляет
автоматическое гашение колебаний
самолёта по углу тангажа.
Чувствительным
элементом по угловой скорости изменения
угла тангажа
Сигнал
пропорциональный
Таким
образом, управляющий сигнал демпфера
нормируется в виде разности сигналов
ДУС и жесткой обратной связи с коррекцией
по скоростному напору и по начальной
настройке. Этот сигнал поступает на
управляющую обмотку ОУ магнитного
усилителя РУБ.
После
усиления на магнитном усилителе и
выпрямления на диодных мостовых
схемах BI
и В2 управляющий сигнал подаётся нa
обмотки W1
и W2.
поляризованного реле РПС-5 и на включённые
последовательно с ними обмотки
положительной обратной связи Woe
магнитного усилителя. Если разность
ампервитков W1
и W2
превышает зону нечувствительности
РПС-5, то его якорь замкнётся с контактом
I
или 2 в зависимости от направления
результирующего потока, включенных
встречно обмоток W1
и W2
и включит силовое реле PI
или Р2.
На
обмотку якоря электродвигателя РАУ
будет подано напряжение. При включении
питания якоря электродвигателя РАУ
потекут токи по обмоткам Wз
и W4
реле РПС-5.
Обмотка
W3
подключена параллельно резистору R2
в цепи якоря электродвигателя, напряжение
на ней пропорционально току якоря Iя
,а создаваемый ею магнитный поток всегда
направлен согласно с результирующим
потоком обмоток W1
и W2
. T.e.
обмотка W3
обеспечивает положительную обратную
связь по току якоря электродвигателя
РАУ и способствует надёжному замыканию
контактов РПС-5 при малых сигналах
управления.
Обмотка
W4
через резистор R3
и регулировочный потенциометр R4
подключена параллельно якорю
электродвигателя РАУ, напряжение
на ней пропорционально напряжению на
якоре Iя
,а создаваемый ею поток направлен
встречно с потоком обмотки W3
Поскольку
,где
Ея
- э.д.с,,наводимая в, обмотке
якоря и равная
Ея=С**Ф,
или Ея=к,
так кок при независимом возбуждении
поток постоянен, то молжно записать,
что
Из
приведенного уравнения видно, что
величина сигнала Отрицательной обратной
связи по напряжению на якоре пропорциональна
угловой скорости его вращения и
улучшает качество -переходных процессов.
Сопротивление
обмотки якоря Rя
значительно меньше сопротивления
R2,
c
которого снимается сигнал положительной
обратной связи, а протекающий по ним
ток IЯ
одинаков. Это позволяет с достаточной
степенью точности считать, что напряжение,
подаваемое на обмотку
W4
пропорционально .частоте вращения
якоря электродвигателя, а обратная
связь по току якоря определяется
действием обмотки W3.
В
перши момент времени после включения
электродвигатель имеет небольшую
частоту вращения, пусковой ток якоря
обеспечивает большой сигнал на обмотке
W3,
поток которой будет преобладать над
потоком W4.
Поэтому разность потоков обмоток W5
и:
W6
будет направлена согласно с потоком
управления, создаваемого обмотками W1
и W2
и увеличит надёжность замыкания
контактов РПС - 5^
По
мере увеличения частоты вращения
электродвигателя РАУ ток в цепи его
якоря уменьшается, а напряжение на
якоре увеличится за счёт роста э.д.с.
Следовательно, поток обмотки W3
будет
уменьшаться, а W4
- увеличиваться. При некоторой частоте
вращения якоря разность потоков обмоток
W3
и W4
изменит знак и , будучи направленной
уже против результирующего потока
обмоток W1
и W2
приведёт к размыканию контактов РПС -
5 и PI
или Р2. С якоря электродвигателя РАУ
будет снято напряжение и он перейдёт
в режим динамического торможения
через нормально - замкнутые контакты
PI
и Р2. Обмотки W3
и W4
обесточатся и результирующй;
поток управления обмоток W1
и W2
/при сохранении на входе магнитного
усилителя управляющего сигнала/ снова
включит РПС - 5,затем PI
или Р2,и на якорь электродвигателя опять
будет подано напряжение.
Таким
образом, электродвигатель РАУ работает
в импульсном режиме. Продолжительность
импульсов, а следовательно, и средняя
частота вращения двигателя зависят от
величины управляющего сигнала. Схема
настраивается такjчто
импульсный режим прекращается, когда
угловая скорость самолёта превышает
2-3 град/с /при максимальном передаточном
числе, которое регулируется с помощью
ДСН/.
Благодаря
импульсному режиму работы РУБ и РАУ
удаётся получить практически, линейную
зависимость скорости перемещения,
штока РАУ от угловой скорости самолёта.
Рис
2.10 Линеаризация
характеристики РАУ
Зона
нечувствительности демпфера по угловым
скоростям рысканья и изменения угла
тангажа имеет величину 0,6град/с
Максимальный
угол отклонения рулей под действием
рулевых агрегатов демпфера составляет
5,4° для руля направления и +/-2,5° для
руля высоты.
Рис
2.11 Схема
для создания зоны нечувствительности
автоматов устойчивости.
По
принципу действия они являются
демпферами, но их отличительной
особенностью является наличие
искусственно создаваемой
зоны
нечувствительности по сигналу с ДУС.
В нормальном режиме полёта автоматы
устойчивости в управлении самолётом
не участвуют. Они вступают в работу,
когда угловые скорости колебания
самолёта превысят установленную зону
нечувствительности.
Схема,
создающая зону нечувствительности,
представлена на рисунке 2.11. Конструктивно
данная схема входит в блок передаточных
отношений.
При
среднем положении щётки потенциометра
ДУС /
В
случае смещения щётки «а» в направлении
уменьшения потенциала, знак сигнала
на входе РУБ изменится на противоположный.
Но это произойдёт только после снижения
потенциала точки до уровня меньшего,
чем в точке «г»-и
ток будет протекать по R2
от точки «г» к точке «а». Ширина зоны
нечувствительности регулируется
положением щеток «в» и «г». Если
раздвигать указанные щётки от точки
«д» то зона нечувствительности увеличится
и наоборот.
При
выходе из строя основных демпферов
автоматы устойчивости
переключаются в аварийный режим
замыканием выключателя В. Это ликвидирует
зону нечувствительности, и автоматы
устойчивости начинают работать в
режиме обычных демпферов.
Эксплуатация
демпферов включает их работу в полете
и техническое обслуживание на земле.
Включение
демпферов в полете производится, как
правило, при достижении самолетом
некоторой минимально необходимой
высоты. Это связано с тем, что отказ
демпфера может привести к отклонению
рулей, н на малой высоте это чревато
аварийной ситуацией.
Для
уменьшения возмущения, создаваемого
отказом демпфера, максимальное
отклонение рулей под действием РАУ
ограничивается и не превышает 20-25%
от всего располагаемого хода рулей.
Отказ
демпфера, сопровождаемый существенным
отклонением руля, летчик воспринимает
по появлению у самолета угловой скорости
и перегрузки. Обнаружить отказ, не
приводящий к значительным возмущениям
самолета, значительно труднее. Поэтому
на некоторых самолетах устанавливают
индикаторы перемещения штока РАУ и
остановка его стрелки будет
свидетельствовать об отказе демпфера.
Довольно
опасным является отказ демпфера,
связанный с обрывом цепи сигнала жесткой
обратной связи. При таком отказе рулевой
агрегат становится интегрирующим
звеном, а в системе самолет-демпфер
возникают расходящиеся автоколебания,
которые летчик не в состоянии парировать
ручным управлением. В этом случае
демпфер необходимо выключить .
Управление
самолетом с отказавшим и выключенным
демпфером имеет особенности из-за
смещения нейтрального положения органов
управления за счет отклонения штока
РАУ. Это нарушает привычные навыки
управления самолетом и затрудняет
пилотирование, а особенно при посадке.
Для повышения надежности работы
демпферов и обеспечения безопасности
полетов наряду с дублированием и
применением автоматов устойчивости
вводится ряд блокировок, исключающих
возможность включения демпферов при
отсутствии давления в гидросистеме
бустеров, при включенном автопилоте,
на высоте полета меньше допустимой.
Назначение.
Системой автоматического управления
принято называть бортовую систему,
предназначенную для обеспечения
требуемых характеристик устойчивости
и управляемости при ручном пилотировании
автоматического и директорного
управления самолетом на различных
этапах полета. При ручном пилотировании
летчик осуществляет управление с
использованием традиционных пилотажных
и навигационных приборов и по внекабинным
ориентирам.
Автоматическое
управление
предусматривает полную автоматизацию
большинства Операций процесса управления
полетом, За летчиком сохраняются функции
выбора цели и способа решения боевой
задачи.
Промежуточным
способом управления является директорное,
при котором самолет пилотируется
летчиком вручную по показаниям
специального командного пилотажного
прибора, получившего название
директорного. Информация на данный
прибор поступает с вычислителя.
Для
более глубокого понимания функций,
выполняемых САУ, необходимо рассмотреть
основные этапы автоматизации управления
полетом самолета.
Практически
до конца 30-х годов управление самолетом
на всех этапах полета выполнялось
летчиком вручную
по визуальным ориентирам
и с использованием информации от
небольшого числа приборов, таких, как
указатели высоты и воздушной скорости,
авиагоризонт, указатель курса.
При
появлении самолетов с большой
продолжительностью полета Длительное
ручное управление, сводившееся в
основном к стабилизации угловых
параметров (тангажа, крена и курса),
стало для летчиков утомительным. Это
привело к появлению
автопилота
(АП), т. е: бортовой автоматической
системы, предназначенной главным
образом для стабилизации углового
положения самолета. С 50-х годов автопилот
не только стал неотъемлемой принадлежностью
каждого самолета, но и расширил свои
функции. Появились режимы стабилизации
высоты полёта, приведения к горизонту,
координированного разворота и других
программных маневров.
Следующим
шагом в автоматизации управления
самолетом стало управление
траекторией
его движения. Это позволило возложить
на систему управления функции, трудно
выполнимые для летчика. К ним относятся,
например, заход на посадку при ограниченной
видимости аэродрома. В дальнейшем в
контур автоматического управления был
включен и рычаг управления двигателем
— появился автомат тяги для поддержания
заданной скорости полета.
Кроме
того, переход на бустерное управление,
вызванный ростом скоростей полета,
привел к тому, что обеспечение приемлемых
характеристик устойчивости и управляемости
без введения
в контур ручного (штурвального) управления
автоматических устройств
стало невозможным. Это положило начало
развитию автоматических систем улучшения
характеристик устойчивости и
управляемости.
Таким
образом, современная САУ представляет
собой развитую систему, включающую
подсистемы более узкого функционального
назначения и выполняющую следующие
основные задачи: обеспечение
требуемых пилотажных характеристик,
направленное на улучшение динамических
свойств ЛА при ручном управлении;
стабилизацию
углового положения ЛА;
автоматизацию
траекторного управления, позволяющую
выводить ЛА в определенную точку
маршрута или осуществлять движение
ЛА по определенной траектории с заданной
скоростью; траекторное управление
требует использования информации
других систем — навигационных и при
цельных.
Состав.
Большинство современных САУ выполняются
по трехканальной схеме. Как правило,
каналы носят название соответствующего
рулевого органа: канал руля высоты
(стабилизатора), канал руля направления,
канал элеронов. Общепринятым является
функциональное разделение каналов
системы управления: канал руля высоты
(стабилизатора) используется для
управления углом тангажа и высотой
полета; канал элеронов для управления
креном и курсом самолета; канал руля
направления — для устранения скольжения
ЛА. Важным для ЛА как объекта управлёния
является также канал управления
скоростью-— автомат тяги.
Многоконтуроность
каналов управления иллюстрирует рис.
3.1, на котором в общем виде изображены
основные контуры САУ. Внутренним
контуром является контур демпфирования,
реализующий обратные связи по угловым
скоростям. Его главным назначением
является гашение короткопериодических
колебаний ЛА. Контур перегрузки образован
за счёт обратных связей по перегрузкам
или аэродинамическим углам. Контур
угловой стабилизации реализует обратные
связи по углам тангажа, крена и рыскания
и функционирует обычно не на всех
режимах полета. Внешним контуром САУ
является траекторный контур (контур
управления положением центра масс).
Рис.
3.1. Основные
контуры САУ
Для
определения состава и назначения
основных элементов типовой САУ (рис.
3.2) рассмотрим ее обобщенную структурную
схему (на схеме отсутствует автомат
тяги).
Рис.
3.2. Структурная
схема САУ
Внешние
системы.
Эта часть объединяет системы, не входящие
в состав САУ и сопрягаемые с ней в
различных режимах. Работа САУ с данными
системами позволяет осуществлять
автоматизацию траекторного управления.
К основным внешним системам относятся:
центральная гировертикаль (ЦГВ), курсовая
система (КС) радиокомандная система
(РКС), радиовысотомер (РВ), система
навигации и посадки (РСВН — радиосистема
ближней навигации), бортовая
радиолокационная станция (РЛС).
Измерители
(датчики) информации.
К ним относятся измерители входящие,
как правило, в состав САУ. По характеру
измеряемой информации о текущем
положении и движении самолета, необходимой
для управления этим движением, датчики
можно разделить на измерители угловых
и линейных величин: датчики угловых
скоростей и ускорений (ДУС и ДУУ), датчики
угла атаки и угла скольжения (ДУА и С)
датчики линейных ускорений (ДЛУ),
корректоры высотные (КВ), предназначенные
для измерения отклонения барометрической
высоты полета от заданной.
Вычислительно-преобразовательные
устройства (ВПУ).
Данные устройства и механизмы
предназначены для решения широкого
круга задач, основными из которых
являются: формирование сигналов
управления самолетом с учетом выхода
на предельные углы атаки, вычисление
и ограничение заданных значений
некоторых параметров (например,
нормальной перегрузки); корректировка
отдельных сигналов законов управления
в целях улучшения переходных процессов;
корректировка передаточных чисел по
скоростному напору, выполняемая
корректорами передаточных чисел (КПЧ);
коммутация цепей прохождения различных
сигналов САУ в зависимости от выбранного
режима; запоминание углового положения
самолета и согласование сигналов
тангажа, крена и курса для исключения
резких отклонений органов управления
ЛА при включении режима стабилизации
углового положения; формирование
законов управления в режиме директорного
управления и выдача сигналов на командные
пилотажные приборы; преобразование
сигналов, наступающих из внешних систем
в вид, требуемый для работы САУ.
Важное
место в обеспечении надежной и безопасной
работы САУ имеют механизм согласования
(МС). При включении ре жима стабилизации
углового положения ЛА САУ стабилизирует
те значения углов тангажа, крена и
курса, которые самолет имел в момент
включения режима. Запоминание этих
значений и обеспечение безударного
включения исполнительных устройств
САУ (в момент включения режима стабилизации
сигналы на входе приводов должны быть
равны нулю, что позволяет исключить
резкое отклонение управляющих
поверхностей) осуществляют механизмы
согласования.
Исполнительные
устройства. Они
предназначены для преобразования
управляющих сигналов САУ в механические
перемещения, необходимые для отклонения
органов управления, и обычно включают
суммирующие устройства и сервоприводы.
Суммирующие
устройства служат для окончательного
формирования управляющего сигнала,
подаваемого в сервопривод. В них
производится алгебраическое суммирование
сигналов с вычислителей и сигналов
обратных связей.
Сервопривод
состоит из усилителя мощности (УМ),
рулевого агрегата (РА) и элементов
обратной связи (ОС) Сервопривод формирует
управляющий сигнал для силового
(рулевого) привода (РП), который
обеспечивает механическое перемещение
органа управления. Наиболее распространённым
типом рулевого привода является
гидроусилитель (бустер). Сервопривод
обеспечивает перемещение распределительного
золотника гидроусилителя в зависимости
от управляющего электрического сигнала.
По
характеру используемой энергии и
способу ее превращения сервоприводы
делятся на электромеханические,
состоящие из электродвигателей и
механических устройств преобразования
движения (редукторов, винтовых пар,
тросовых механизмов и т. д.),
электрогидравлические, представляющие
собой гидроцилиндры с золотниковым
управлением подачей жидкости, нагнетаемой
под высоким давлением, электропневматические,
приводимые в движение сжатым воздухом.
Управление
золотниками электрогидравлических и
электропневматических сервоприводов
осуществляется с помощью специальных
электромеханических преобразователей.
В
самолетных САУ наиболее широкое
применение нашли электромеханические
сервоприводы с РА типа раздвижных тяг
и электрогидравлические сервоприводы.
Рулевые
агрегаты приводов включаются в проводку
управления рулями самолета по
дифференциальной или по параллельной
схеме.
При
дифференциальной
схеме рулевой агрегат встраивается в
проводку управления таким образом,
чтобы отклонения ручки управления
летчиком и рулевым агрегатом складывались
и суммарное отклонение передавалось
на золотник гидроусилителя, т. е.
где
Δ
— отклонение органа управления, ΔЛ
—отклонение органа управления от ручки
ручного управления, ΔРА
— отклонение органа управления от
рулевого агрегата.
Частным
случаем дифференциальной схемы является
последовательное включение рулевого
агрегата типа раздвижной тяги (например,
РАУ-107) в разрыв проводки управления
между ручкой и гидроусилителем (рис.
3.3,а).
Рис.
3.3. Схема включения РА:
а
– последовательная; б – дифференциальная;
параллельная
Другим
способом дифференциального включения
рулевого агрегата является применение
специальной суммирующей качалки (рис.
12.3, 6), шарнирно связанной с тягой проводки
управления, штоком РА и гидроусилителем.
При неподвижной ручке управления и
перемещении штока РА качалка поворачивается
вокруг оси шарнира В, неподвижность
которого обеспечивается трением
проводки к ручке управления. Перемещение
ручки управления вызывает поворот
качалки вокруг оси шарнира С, связанного
со штоком РА.
Параллельная
схема включения рулевого агрегата
характеризуется тем, что он подсоединен
к проводке управления параллельно с
ручкой управления (рис. 3.3,в). Такая схема
требует перемещения выходного органа
РА синхронно с перемещением ручки
управления, и наоборот, при автоматическом
управлении от РА перемещается вся
проводка управления вместе с ручкой.
Ручное управление ЛА возможно только
при отключении РА (например, с помощью
электромагнитной муфты) или при
пересиливании летчиком РА (такая
возможность специально предусматривается).
Возможно также управление самолетом
через сервопривод посредством задатчиков
на пульте управления (ПУ) САУ или строевой
рукоятки (СР).
Использование
любой из рассмотренных схем требует
соответствующих мер безопасности,
исключающих аварии в случае отказов в
САУ, в том числе в случае отказов
приводов. При отказах САУ типа
«максимальный сигнал» ограничивают
ход выходных органов рулевых агрегатов,
характеризующихся высоким быстродействием.
Схема
дифференциального включения РА в
проводку управления является
отказобезопасной при заклинивании РА.
В этом случае агрегат превращается в
жесткую тягу и не затрудняет ручное
пилотирование. В САУ с параллельным
включением РА используются различные
схемы их отключения от проводки
управления (например, электромагнитные
муфты) и устройства ограничения
максимальных усилий, развиваемых этими
агрегатами, до значений, при которых
летчик может осуществлять пересиливание.
Устройства
индикации и управления. Для
управления САУ, а также для контроля
ее функционирования в кабине летчика
имеется ряд кнопок и пульт управления.
О включении САУ, а также о включении
того или иного режима работы САУ
сигнализируют соответствующие лампочки
или поворотные бленкеры, расположенные
на ПУ и приборной доске. Две кнопки
управления САУ обычно помещают на ручке
управления ЛА. Это — кнопка отключения
САУ, которой летчик пользуется в случае
необходимости быстрого прекращения
автоматического управления самолетом
(например, при наличии признаков отказа
САУ), и кнопка приведения ЛА к
горизонтальному полету, используемая
летчиком при потере пространственной
ориентировки, Остальные органы
переключения режимов работы САУ
размещаются на ПУ и приборной доске.
Все
САУ предусматривают возможность
вмешательства летчика при функционировании
режима стабилизации с целью либо
коррекции, либо изменения значений
стабилизирующих параметров. Для этого
часто используют специальные задатчики,
выполняемые или в виде небольших по
размеру рукояток, отклоняемых в двух
направлениях и называемых строевыми,
или в виде ручек (маховичков) потенциометров.
При отсутствии задатчиков заданные
значения стабилизируемых параметров
формируют механизмы согласования.
Режимы
работы.
Типовыми для САУ являются режимы
согласования, демпфирования, стабилизации,
ограничения критических режимов полета
и траекторного управления.
Режим
согласования
обеспечивает подготовку всех устройств
САУ к работе, обнуление сигналов на
входах усилителей РА и установку
выходных органов последних в нейтральное
положение. Он возникает сразу же после
подачи в САУ питания или при отключении
какого-либо режима работы САУ в процессе
полета. При этом следящие системы
механизмов согласования отслеживают
текущие значения угловых координат
самолета.
В
режиме демпфирования
САУ осуществляет демпфирование угловых
колебаний самолета по законам, характерным
для всех современных демпферов. Этот
режим включается либо на исполнительном
старте, либо в полете.
В
режиме стабилизации
САУ обеспечивает стабилизацию углов
тангажа υ, крена γ и курса ψ, заданных
летчиком в процессе пилотирования.
Ввод этих значений может осуществляться
с помощью специальных задатчиков или
механизмов согласования. Наличие
механизмов согласования позволяет
летчику переходить на ручное пилотирование
без выключения ре жима стабилизации.
При возникновении управляющих усилий
летчика на ручке управления в зависимости
от их направления специальные концевые
выключатели, находящиеся в ручке,
переводят соответствующие каналы
управления САУ из режима стабилизации
в режим демпфирования. По окончании
ручного пилотирования САУ будет
стабилизировать то угловое положение
самолета, которое он имел в момент
снятия летчиком усилий с ручки управления.
Значения стабилизируемых углов будут
введены из механизмов согласования.
Режим
приведения
к горизонту
включается летчиком при потере
пространственйой ориентировки кнопкой,
находящейся на ручке управления. При
включении этого режима САУ обеспечивает
приведение самолета к нулевым углам
крена и тангажа. Нулевые значения этих
углов формируются механизмами
согласования.
Режимы
траекторного
управления
САУ обеспечивают управление, не только
угловым положением самолета, но и
движением его центра масс.
Законы
управления.
Функционирование САУ в любом из режимов
ее работы определяется законами
управления. Под законами управления
понимается математическое выражение,
устанавливающее связь между перемещениями
органов управления (выходными сигналами
исполнительных механизмов) и входными
управляющими сигналами каналов САУ.
Даже
для решения одной и той же задачи в
системах автоматического управления
самолетов различных типов применяются
разные законы управления. Их вид
определяется требованиями к точности
управления, видом обратной связи РА,
используемыми рулевыми органами и т.
д. Однако несмотря на разнообразие
законов управления, в основе их
функционирования лежат одинаковые
принципы.
Управление
продольным движением.
Для управления продольным движением
самолета используется канал руля высоты
(стабилизатора). Рассмотрим основные
принципы работы этого канала САУ в
режиме стабилизации заданного угла
тангажа υ.
Рис.
3.4. Контур стабилизации угла тангажа:
а
– невозмущённый полёт; б – воздействие
возмущения
Предположим,
что в исходном положении самолета (угол
тангажа равен заданному значению υЗ)
щетки потенциометрического датчика
(ПД) позиционного гироскопа (ПГ),
являющегося измерителем угла тангажа,
и потенциометра обратной связи (ПОС),
характеризующего положение выходного
органа РА, стоят в нейтральном положении
(рис. 3.4, а)
При этом сигнал uвх
поступающий с выхода суммирующего
устройства на усилитель (У) сервопривода,
равен нулю. Пусть под действием
какого-либо импульсного момента (причина
появления момента роли не играет)
самолет изменил угол тангажа с υЗ
на υ. Одновременно с корпусом самолета
свое пространственное положение изменят
и элементы САУ. Неподвижным остается
только гироскоп со щеткой потенциометрического
датчика, жестко закрепленный на его
рамке. Поворот потенциометра ПД
относительно своей щетки вызовет
появление сигнала пропорционального
разности нового значения угла тангажа
υ и исходного (заданного) значения этого
угла υЗ,
т. е. uy=Kυ(υ-υЗ).
Этот сигнал поступает в суммирующее
устройство и формирует сигнал uвх
управления РА, что вызывает движение
его выходного органа, а следовательно,
и отклонение руля высоты на величину
Δδв.
Изменение положения руля высоты приводит
к появлению управляющего момента Мупр
(Δδв)
(рис. 3.4, б).
Одновременно отклоняется щетка
потенциометра обратной связи ПОС.
Перемещение выходного органа РА
прекратится, когда сигнал с ПГ будет
уравновешен сигналом обратной связи
с ПОС, т. е. когда выполнится условие
uy-
uо.
с=0. Под
действием управляющего момента самолет
начнет поворачиваться к исходному
положению. А это значит, что все элементы
САУ, связанные с корпусом ЛА (в том числе
и потенциометр ПД), также будут
перемещаться к своему первоначальному
положению и управляющий сигнал uy
начнет уменьшаться. Входной сигнал uвх
подаваемый на РА, при этом изменит свой
знак, так как теперь uо.
с станет
больше uy
что вызовет перемещение выходного
органа РА (руля высоты) и щетки
потенциометра ПОС к нейтральному
положению. Конечным положением элементов
канала руля высоты САУ после отработки
сигнала uy
вызванного отклонением угла тангажа
от заданного значения, будет положение,
соответствующее исходному (рис. 3.4, а):
на входе суммирующего устройства
сигналы отсутствуют, выходной орган
РА и руль высоты в нейтральном положении.
Таким
образом, из рассмотренного примера
видно, что для обеспечения функционирования
канала САУ необходимо формировать
управляющий сигнал uy,
пропорциональный величине рассогласования
между текущим и заданным значениями
управляемого параметра. Для случая
стабилизации тангажа этот сигнал
определяется как uy=КυΔυ,
где Кυ
— коэффициент пропорциональности, а
Δυ=υ-υЗ.
Учитывая, что положение управляющей
поверхности при использовании рулевого
агрегата с жесткой отрицательной
обратной связью определяется величиной
управляющего сигнала, закон управления
рулем высоты в рассматриваемом примере
будет иметь вид
Обычно
для улучшения качества процессов
управления в закон управления вводят
сигнал, пропорциональный скорости
изменения управляемого параметра, т.
е. демпфирующий сигнал, уменьшающий
колебательность переходных процессов.
Тогда
закон управления канала руля высоты
можно представить в виде
Коэффициенты
Физически
передаточные числа по любому из
параметров, входящих в закон управления,
характеризуют отклонение рулевого
органа, приходящееся на единицу изменения
этого параметра. Устойчивость движения
автоматически управляемого летательного
аппарата и качество управления его
полетом зависят от правильности выбора
значений передаточных чисел по
управляемым параметрам.
Другим
важным режимом автоматического
управления самолетом, который
осуществляется за счет воздействия
как на канал руля высоты (стабилизатора),
так и на канал элеронов, является режим
приведения к горизонту. Уже из его
названия видно, что главной задачей
САУ в этом режиме является вывод самолета
из любого пространственного положения
в горизонтальный полет, т. е. в полет с
нулевыми углами наклона траектории
В
связи с тем, что измерителей угла наклона
траектории θ нет, для формирования
закона управления используются датчики
угла тангажа υ и угла атаки α,
что позволяет
определить угол θ. путем косвенных
измерений по формуле θ=υ-α.
Тогда
закон управления рулем высоты можно
записать в следующем виде:
Однако
применение закона управления в таком
виде может привести в процессе
функционирования САУ к выходу самолёта
на большие перегрузки. Поэтому к закону
управления () добавляют сигнал по
нормальной перегрузке, определяемый
членом
Кроме
того, ошибки измерителей α
и υ не
позволяют с необходимой точностью
выдерживать нулевой угол наклона
траектории, что приводит к нарастающему
во времени отклонению текущей высоты
полета ЛА от заданной. Поэтому на
конечном этапе приведения к горизонтальному
полету в закон управления () вводится
сигнал рассогласования по высоте
Таким
образом, типовой закон управления
канала руля высоты САУ в рассматриваемом
режиме имеет вид
Функциональная
схема канала руля высоты САУ для режимов
стабилизации и приведения к горизонту
представлена на рис. 3.5. Измерения угла
атаки а и
нормальной перегрузки nу
выполняются
соответственно датчиком угла атаки
(ДУА) и датчиком линейной перегрузки
(ДПЛ). Формирование сигнала
ΔH=Н-НЗ
выполняется
корректором высоты (КВ). Контакты на
схеме изображены в положениях,
соответствующих режиму стабилизации,
а перевод в режим приведения к горизонту
производится замыканием контуров по
углу атаки, перегрузке и высоте.
Рис.
3.5. Функциональная
схема управления продольным движением
Управление
боковым движением. Для
данного управления могут использоваться
каналы руля направления и элеронов. В
настоящее время канал руля направления
САУ применяется в основном для
демпфирования угловой скорости ωу
в соответствии
с законами управления, характерными
для демпферов. Поэтому для создания
управляющих моментов в боковом движении
самолета служит канал элеронов. В режиме
демпфирования канал элеронов САУ
выполняет функции демпфера угловой
скорости ωх.
В режиме стабилизации канал может
решать две задачи в зависимости от
углового положения самолета в момент
включения режима. Если при включении
крен превосходит 6-8°
(для САУ различных самолетов этот угол
разный, однако лежит в данных пределах),
канал осуществляет
стабилизацию угла крена в соответствии
со следующим законом управления:
где
γЗ
- значение
крена, который имел самолет в момент
включения режима.
В
этом случае самолет будет совершать
разворот (изменять курс) с постоянным
креном γ=γЗ.
Рис.
3.6. Функциональная
схема управления боковым движением
Если
крен самолета в момент включения мал,
то канал элеронов будет осуществлять
стабилизацию курса по закону
где
ψЗ
- значение курса в момент включения
режима стабилизации.
Сигнал
по крену
На
рис. 12.6 представлена функциональная
схема каналов руля направления и
элеронов. Измерителями параметров
движения самолета, потребных для
рассмотренных законов управления,
являются: ЦГВ, курсовая система (КС) и
датчики угловых скоростей ДУС
Рассмотренные
основные принципы формирования законов
управления САУ справедливы и для режимов
траекторного управления, которые
обеспечивают движение самолета по
заданной траектории или наведение на
заданную цель. Эти режимы работы САУ
используются при заходе на посадку, в
маршрутном полете, при наведении на
воздушную
Рис.
3.7. Схема
формирования γЗ
или
наземную полете с огибанием рельефа
местности и т. д. Простейшим режимом
траекторного управления можно считать
режим приведения к горизонту, так как
на конечном этапе он обеспечивает полет
самолета на постоянной высоте. Для
создания управляющих сил и моментов
при траекторном управлении используются
внутренние контуры САУ. При этом заданные
значения углов тангажа (или нормальной
перегрузки) и крена изменяются в
зависимости от величин отклонений
самолета соответственно в вертикальной
(ΔH=Н-НЗ)
и горизонтальной (z)
плоскостях
от заданного местоположения. Так, при
полете самолета по заданной траектории
в режиме «Маршрут» управление в
горизонтальной плоскости осуществляется
в соответствии с законом (). Заданное
значение крена в этом режиме вычисляется
в соответствии со следующим выражением:
где
z -
боковое отклонение центра масс самолета
в горизонтальной плоскости (рис. 3.7);
Δψ=ψ-ψЗ
- отклонение курса самолета от заданного.
В
процессе управления вследствие
уменьшения величин z
и Δψ значение
γЗ
также будет уменьшаться, пока не примет
нулевое значение.
Траекторное
управление самолетом осуществляется
как в автоматическом, так и в директорном
режиме работы САУ.
Одной
из функций САУ, обеспечивающей
безопасность полета, является
автоматическое выдерживание
эксплуатационных ограничений. Реализация
этой функции позволяет предотвратить
выход самолета на критические режимы
полета, сопряженные с опасностью
возникновения аварийных ситуаций или
ситуаций, ставящих под сомнение
возможность выполнения боевой задачи.
Решение
задачи частичной автоматизации
управления для облегчения летчику
ручного пилотирования на сложных
этапах полета обеспечивается
директорным управлением.
Рис.
3.8. Функциональная
схема директорного управления
Принцип
директорного управления заключается
в следующем. Информация от различных
датчиков (измерительных систем),
необходимая для траекторного управления,
вводится в специальный вычислитель
(рис. 3.8), реализующий выбранный закон
управления. Сигнал управления,
сформированный вычислителем, поступает
не на вход сервопривода, как это делается
при автоматическом управлении, а на
командную (директорную) стрелку
командно-пилотажного прибора (КПП).
Закон
отклонения стрелки в общем виде можно
записать так:
где
х -
управляющий параметр, а kстр
- коэффициент усиления прибора.
Важное
значение при организации директорного
управления имеет выбор управляемого
параметра х,
который
должен обеспечить перевод задачи
управления центром масс в задачу
управления угловым движением самолета.
Обычно в качестве управляемого параметра
для продольного движения выбирается
угловая скорость тангажа ωz
или нормальная перегрузка nу.
Для управления
боковым движением. используется угол
крена γ. Таким образом, законы отклонения
командных стрелок продольного (при
x=nу)
и бокового
каналов управления будут иметь следующий
вид:
где
параметры nуз
и γз
являются функциями соответствующих
координат траекторного движения
самолета.
Летчик,
заметив отклонения командных стрелок,
должен добиться возвращения их в
исходное положение соответствующим
перемещением рычагов управления (РУ).
Устранение отклонения стрелок означает,
что летчик создал перегрузку (крен для
бокового канала), равную заданному
вычислителем значению. Направление
перемещения ручки управления при
пилотировании по директорному при бору
должно совпадать с направлением
отклонения командных стрелок, а величина
ее перемещения должна быть согласована
с величиной отклонения этих стрелок.
Необходимое соответствие по величине
летчик устанавливает в процессе
тренировок. Законы формирования
отклонений командных стрелок в принципе
требуют от летчика простого управления
угловыми движениями самолета для
удержания стрелок в нейтральном
положении. При этом закон отклонения
ручки управления δЛ
для любого
из каналов можно представить в виде
δЛ=kЛδстр, ()
где
kЛ
- коэффициент
передачи летчика.
Выражение
() не учитывает запаздывания, вносимого
летчиком. Путем тренировок летчик
подбирает оптимальное значение
коэффициента kл.
Однако
постоянным этот коэффициент можно
считать лишь приблизительно.
Применение
директорного управления позволяет
значительно разгрузить летчика, но
имеет ряд недостатков. Основными из
них являются: механический характер
действий летчика: меньшая точность по
сравнению с автоматическим управлением,
определяемая погрешностями слежения
летчиком за командными стрелками и
низкой точностью командных приборов;
снижение внимания летчика к приборам,
непосредственно не связанным с
директорным управлением, что при
отсутствии встроенного контроля
вычислителя может вызвать запаздывание
в выявлении его отказа.
Последний
недостаток можно в определенной степени
ослабить, если научить летчика чаще
обращать внимание на пилотажные приборы
и следить за поведением планок положения
КПП. При нормальной работе вычислителя
в процессе директорного управления
эти планки должны плавно подходить к
своему нейтральному положению и в
дальнейшем не покидать его малых
окрестностей. При отказе вычислителя
появляется. либо уход планок от
нейтрального положения, либо их
расходящиеся колебания.
Между
автоматическим и директорным управлением
существует сильное сходство, заключающееся
прежде всего в одинаковых законах
управления органами управления. Это
обеспечивает единство структуры и
идентичность передаточных чисел. На
рис. 3.9 изображена функциональная схема
связи автоматического и директорного
управлений для
Рис.
3.9.
Функциональная схема директорного
управления продольным и боковым
движением
случая
использования В качестве управляемых
параметров нормальной перегрузки ny
и крена γ.
Различием контуров автоматического и
директорного управлений является то,
что управляющие сигналы,. сформированные
вычислителем, в первом случае подаются
на сервоприводы соответствующих каналов
управления, а во втором - на командные
стрелки директорного прибора. Причем
при директорном управлении сигналы
улучшения управляемости (демпфирования)
подаются непосредственно на сервоприводы,
а не на командные стрелки.
В
настоящее время режим дирекорного
управления начинает играть вспомогательную
роль. Он становится резервным на
случай
отказа автоматического управления.
Влияние
САУ на безопасность полетов складывается
из двух противоречивых факторов. С
одной стороны, САУ существенно повышает
безопасность полетов, что достигается
за счет улучшения характеристик
устойчивости и управляемости, наличием
режима приведения к горизонту,
автоматизацией сложных режимов
траекторного управления, возможностью
контроля работы САУ в автоматических
режимах по директорным приборам,
наличием систем ограничения предельных
режимов полета и т. д. С другой стороны,
если при автоматическом управлении
полетом происходит отказ САУ, то в
результате этого может возникнуть
опасная ситуация.
Основой
надежной, безопасной работы САУ является
грамотная техническая эксплуатация.
Для проведения регламентных работ и
подготовки САУ к полетам используются
в основном три типа аппаратуры: штатная
неавтоматизированная контрольно-проверочная
аппаратура, автоматизированные системы
контроля (АСК), системы встроенного
контроля (СВК).
Неавтоматизированная
проверочная аппаратура включает
пульты-имитаторы и контрольно-измерительные
пульты различного целевого назначения.
Проверки производятся либо с реальными
информационными системами, либо с их
имитаторами. Ряд датчиков (например,
ДУС, ДПЛ) снимаются с самолета и
устанавливаются на специальные
платформы, имитирующие его эволюции.
Наиболее трудоемкой операцией технической
эксплуатации САУ является операция
проверки и настройки передаточных
чисел. При этой операции последовательно
имитируются движения самолета, вызывающие
определенные сигналы различных датчиков.
Одновременно с помощью специальных
измерителей определяются углы отклонения
органов управления. Неудобство применения
этих измерителей и трудоемкость операции
в целом требуют разработки новой
технологии проверки и настройки
передаточных чисел. Перспективным
путем здесь является использование
точных электрических датчиков положения
органов управления.
Автоматизированные
системы контроля служат для подготовок
САУ и проведения регламентных работ.
К бортовым контрольным разъемам самолета
АСК подключаются без снятия агрегатов
САУ. Основной задачей АСК является
проверка функционирования и основных
параметров наиболее ответственных и
наименее надежных подсистем и устройств
САУ. С помощью АСК можно провести,
например, следующие проверки: включение
и отключение режимов демпфирования,
автоматическое управление и приведение
к горизонту; функционирование РА всех
каналов и срабатывание их концевых
выключателей; функционирование
гиромоторов всех ДУС; функционирование
механизмов согласования крена, тангажа
и курса; прохождение сигналов крена,
тангажа и курса в различных режимах;
функционирование различных ограничителей;
формирование ряда сигналов, входящих
в законы управления.
Применение
АСК позволяет уменьшить время проверки
САУ и снизить трудозатраты, однако не
решает вопрос о контроле функционирования
системы управления в полете. Поэтому
в настоящее время все более широкое
применение начинают находить системы
встроенного (или бортового) контроля
(СВК).
В
принципе отдельные элементы встроенного
контроля имеются во всех САУ. Примером
могут служить кнопки-лампы включения
режимов. Однако под
встроенным
контролем понимается достаточно
глубокий контроль состояния САУ.
Внедрение
СВК совместно с использованием наземных
АСК позволяет сократить сроки подготовки
САУ к применению и потребные
трудозатраты, увеличить глубину и
объективность инструментального
контроля, исключить субъективные ошибки
обслуживающего персонала и летных
экипажей.
Во
время полета
основными функциями СВК являются:
проверка каналов САУ на функционирование
с обнаружением отказов; автоматическое
отключение основного канала при
возникновении отказов и включение
дублирующего канала; блокировка
включения неисправного канала;
автоматическое переключение на другой
режим работы еду,
обеспечивающий
безопасность Полета, если при возникшем
отказе не обеспечивается требуемое
качество управления на включенном
режиме; сигнализация экипажу об отказах
САУ.
При
выполнении ряда задач, связанных с
траекторным управлением, необходимо
использовать информацию не только
измерителей, входящих в состав САУ, но
и бортовых и наземных навигационных
систем (радиотехнических, инерциальных
и др.). увеличение количества различных
систем, применяемых для управления
движением самолёта, функциональное и
конструктивное их усложнение и всё
более тесное взаимодействие, расширение
числа режимов траекторного управления
потребовали создания специализированных
комплексов, объединяющих функции систем
управления, навигации и боевого
применения в целях решения поставленных
перед ЛА задач, такие комплексы получили
наименование полотажно-навигационных
или прицельно-навигационных.
Под
пилотажно-навигационным комплексом
(ПНК) понимается совокупность датчиков
информации и измерительных систем,
систем обработки и отображения
информации, систем управления,
предназначенных для пилотирования и
навигации летательного аппарата.
Назначение
пилотажно-навигационных комплексов
определяется назначением и способами
применения летательных аппаратов.
Поэтому различают ПНК самолётов
фронтовой авиации, ПНК военно-транспортной
самолётов, ПНК самолётов дальней авиации
и т. д.
Основными
отличительными особенностями ПНК
является: наличие
нескольких не зависящих друг от друга
каналов получения навигационных
данных; комплексирование
навигационных систем на основе
применения бортовых цифровых
вычислительных машин;
использование
в БЦВМ специальных алгоритмов обработки
информации, позволяющих обеспечить
более высокую точность и надежность
навигации;
тесная
связь навигационных систем с САУ, что
позволяет автоматизировать управление
самолетом на относительно сложных и
значительно протяженных этапах полета
(маршрутный полёт, наведение на воздушные
и наземные цели и т. д.).
Рис.
3.10. Структурная
схема ПНК
Типовой
ПНК (рис. 3.10) имеет три информационные
системы, позволяющие определить
координаты самолета на основе различных
по физической природе измерений.
Центральным связывающим звеном ПНК
является вычислительная система,
состоящая из одной или нескольких БЦВМ.
Вычислительная система обрабатывает
информацию навигационных систем и на
основе ее сравнения и анализа определяет
с высокой точностью координаты самолета.
При этом отфильтровываются помехи,
влияющие на выходные сигналы каждой
из информационных систем в отдельности.
Система
автоматического управления является
связывающим звеном между системами
навигации и управления полетом. Она
обеспечивает траекторное управление
самолетом в автоматическом и директорном
режимах. В состав системы отображения
информации ПНК входят индикаторы
навигационной обстановки, картографические
планшеты и пилотажно-навигационные
приборы.
Одной
из важных особенностей ПНК является
наличие системы встроенного контроля
(на рисунке не показана), предназначенной
для контроля функционирования комплекса
в целом, отдельных его частей и
правильности решения наиболее важных
задач.
Одним
из путей дальнейшего развития ПНК
является использование многопроцессорных
БЦВМ, обладающих высоким быстродействием
(десятки миллионов операций в секунду)
и большой памятью. это позволит
значительно повысить точность
пилотирования и навигации.
Непрерывное
совершенствование ЛА, усложнение задач
стоящих перед авиацией, предъявляет к
системам ЛА такие требования которые
могут быть удовлетворены только путем
комплексирования оборудования,
установленного на борту. Значительная
часть бортового навигационного
оборудования, прицельного и пилотажного
оборудования пилотируемых ЛА уже
на уровне второго - третьего поколения
ЛА объединена в бортовые автоматизированные
комплексы / БАК/:
Рис
3.11
НК
- навигационный комплекс. НК позволяет
определять место положения. ЛА в
выбранной системе координат. В состав
современных НК входят как правило в
качестве основной части инерциальные
навигационные системы - ИНС;
ПК-
пилотажный комплекс. Ж решает задачи
пилотирования и улучшения его
лётно-технических характеристик;
ПрК
- прицельный комплекс, с его помощью
производится прицеливание по наземным
и воздушным целям;
РК
- разведывательный комплекс, решает
задачи разведки наземных и воздушных
целей. ~
ПК
и НК образуют пилотажно-навигационный
комплекс ШК. ПНК обеспечивает
самолётовождение и автоматизацию
самолетовождения, а совместно
ПрК
- образует прицельный пилотажно-навигационшй
комплекс ПрНК.
Пилотажный
комплексf
частично рассматриваемый в данной
теме, имеет в своем составе:
Рис
3.12
СОПИ
- Cистема
отображения пилотажной информации /
часто на полупрозрачном зеркале
переднего обзора /;
СШУ
- система штурвального управления, СШУ
состоит из рычагов управления,
механической проводки, гидроусилителей,
загрузочных
механизмов и механизмов триммерного
эффекта. СШУ на большинстве современных
ЛА автоматизирована за счёт включения
АРУ, АРЗ, демпферов и автоматов
устойчивости. По мере развития ручного,
управление СШУ имеет тенденцию к замене
на электрические системы дистанционного
управления ЭСДУ:
Рис
3.13
ЭСДУ
обладают повышенной надежностью в
сравнении с механической СШУ за счёт
возможности многократного резервирования
электрических каналов управления.
САУ
- представляют собой часть бортового
оборудовали , предназначенную для
решения взаимосвязанных задач ручного,
полуавтоматического / директорного /
управления полётом. На современных САУ
по выполняемым функциям можно
рассматривать как исполнительна часть
ПНК или ПрПНК. В основном САУ решает
задачи управления угловым положением
и перегрузками ЛА в интересах управления
движением центра масс /траекторное
управление/.
Рис
3.12
Функциональное
назначение САУ с развитием авиационной
техники непрерывно расширяется,
сопровождаясь увеличением числа режимов
работы и количества внешних связей с
другими видами оборудования и комплексами
вооружения.
Режимы,
улучшающие динамические /пилотажные
/ свойства ЛА как объекта
управления и облегчающие процессы
ручного пилотирования ч
/режимы
автоматизированного ручного управления/;
Режимы
стабилизации углового положения ЛА;
Режимы
автоматического и директорного
управлении движением центра масс ЛА
/режимы траекторного управления /.
Режимы,
обеспечивающие выполнение
запрограммированных маневров, повышающих
безопасность полётов /приведение к
горизонтальному полёту,
уход на безопасную высоту, автоматическое
предотвращена выхода, ЛА в область
опасных режимов и др./;
Режимы
боевого маневрирования, обеспечивающие
эффектилное применение отдельных
видов вооружения.
По
мере развития САУ, конструктивного и
технологии совершенствования их базовых
элементов, а также широкого внедрения
цифровой вычислительной техники, число
функциональных режимои САУ непрерывно
увеличивается. В последнее время
особенно интенсивно; развивается
концепция активного управления полётом.
Активные системы управления предусматривают
активное влияние САУ на выбор основных
конструктивных и аэродинамических
параметров ЛА еще на ранней стадии его
проектирования. В результате значительно
улучшаются лётно-технические
характеристики ЛА, однако полёт и
выполнение задания с отключёными САУ
оказываются практически невозможными.
Внедрение систем с активного
управления позволяет качественно
изменить пилотажные свойства ЛА ,
снизить его массу при сохранении массы
полезной нагрузки, увеличить дальность
полёта при изменном запасе топлива,
повысить критическую скорость флаттера,
повысить комфорт экипажа и пассажиров
при полёте в турбулентной атмосфере,
более полно использовать маневренные
возможности ЛА в эксплуатационном
диапазоне высот и скоростей Столь
обширная область влияния САУ на
лётно-технические характеристики
ЛА объясняется выполнением САУ следующих
принципиально
новых функций:
1.
Улучшение устойчивости и управляемости
ЛА с помощью ЭСДУ, использующей
совершенные законы регулирования
управления и загрузки /аналог
АРУ и АРЗ /;
2.
управление ЛА с уменьшенными запасами
устойчивости, т, е. с уменьшенными по
площади хвостовым оперением и крылом
/устойчивость ЛА
в данном случае будет обеспечена
реализацией закона управления
где
3.
непосредственное управление
аэродинамическими силами / подъёмной
Y
и боковой Z/
с помощью относительно больших по
площади интерцепторов, флаперонов
/симметричные элероны-закрылки/,
спойлеров - поверхности, аналогичные
интерцепторам/, переднего дополнительного
горизонтального и вертикального
оперения; а также адаптивного крыла
/крыла с изменяющимися в широких пределах
профилем и
кривизной /;
4.
парирование воздействия ветра и
подавление аэроупругих колебаний
конструкции ЛА /включая увеличение
критической скорости флаттера - эта
функция предполагает наличие на борту
помимо ЦВМ быстродействующих
достаточно мощных сервоприводов и до
десятка акселерометров и датчиков
угловых скоростей, размещённых в
различных точках фюзеляжа
и плоскостей крыла. Реализация данной
функции повышает комфорт экипажа и
позволяет использовать элементы
конструкции ЛА с меньшим запасом
прочности.
Блок
датчиков линейных, ускорений БДЛУ 1-3 -
.предназначен для измерения боковых
линейных ускорений , nz
и выдачи электрического сигнала,
порционального линейному ускорению,
действующему вдоль оси чувствительности.
Принцип действия блока основан на
свойствах свободного маятника
устанавливаться по направлению
результирующих сил, действующих на
него в направлении, перпендикулярном
оси подвеса маятника.
Рассмотрим
электрокинематическую схему БДЛУ /рис.
3.13/, на данном рисунке приведены следующие
обоэначения;
У1
- усилитель постоянного тока-УПТ-9
У2
- датчик линейных ускорений ДЛУБ-12
У3
- малогабаритный универсальный блок
питания
У4
- блок усилителя обратной связи БУ 44-2
ДУ
- ДУ - датчик угла;
ЭП
- электрическая пружина /моментный
датчик/;
Мнб
– момент небаланса
Мпр_
- момент пружины
Xi,
Zi
- условные оси /совпадают как правило
со связанными осями самолёта /.
При
действии линейных ускорений, направленных
по оси Zi
возникает инерционный момент, отклоняющий
маятник от положения равновесия
относительно оси Х. Отклонение маятника
по оси Xi
преобразуется датчиком угловых
отклонений ДУ в электрический сигнал.
Сигнал с ДУ поступает на вход амплитудного
фазочувствительного детектора усилителя
У4, преобразуется в напряжение постоянного
тока определённой полярности и через
усилитель У1 подаётся на электричаскую
пружину ЭП датчика У2. ЭП создаёт момент,
пропорциональный току, который
компенсирует момент инерционных сил
Ми, действующих на массу М маятника.
Рис
3.13.Электрокинематическая
схема БДЛУ
Момент
инерционных сил выражается формулой:
,
где: м - масса небаланса (Г*сек2/
см)
l
- плечо небаланса (см )
а
- действующее линейное ускорение
(см/сек2
)
Так
как действующая перегрузка равна n=a/g,
а момент небаланса
Под
действием инерционного момента подвижная
часть стремится от среднего положения.
Этому препятствует противодействующий
момент пружины ЭП:
Кпр
- крутизна датчика момента (г*см/мА)
I
- ток в катушке датчика момента (мA)
При
достижении равенства инерционного
момента и момента пружины отклонение
подвижной части прекратится и в этом
случае:
Таким
образом, ток в катушке моментного
датчика /ЭП/ прямопропорционален
действующему линейному ускорению
/перегрузке/. Включив последовательно
с катушкой моментного датчика ЭП
сопротивление нагрузки Rн
, получим:
Т.е
напряжение на нагрузке пропорционально
действующей перегрузке "n".
БДЛУ устанавливается в самолёте вблизи
центра масс таким образом, чтобы
стрелка на корпусе совпадала с
направлением действия линейных
ускорений /в данном случае по поперечной
оси Z1/.
Непараллельность продольной и поперечной
осей самолёта и соответствующих
осей БДЛУ не должна превышать 1°.
-
напряжение питания однофазного
переменного
тока частотой …………………………400 ± 20Гц
36В;
-
порог чувствительности…………………………………….не
более 0,003ед;
-
диапазон измерения ускорений
…………….……………..3 ед;
-
максимальное значение выходного
сигнала……………..10+/- 0,2В;
-
масса, не более.......…………………………………............0,759кг.
Корректор
высоты KB
- I6
- I
(см рис 3.14, 3.16) предназначен для измерения
отклонения барометрической высоты
полёта от заданной и выдачи электрического
сигнала, пропорциональному этому
отклонению.
Рис.
3.14.
Кинематическая схема корректора высоты
KB-I6.
Структурная
схема прибора показана на рис. 3.14. При
изменении высоты полёта ход анероидного
чувствительного элемента ЧЭ передаётся
через передаточный механизм ПМ к якорю
электромагнитной муфты ЭМ, При включении
ОМ якорь муфты соединяется с рамками
сигнальной обмотки индукционного
датчика ВД. Одновременно с включением
ЭМ срабатывает электромагнитный
фиксатор ЭФ нейтрального положения
рамок датчика ЦЦ. Рычаги ЭФ раздвигаются
и рамки получают свободу перемещения.
Сигналы сигнальной обмотки рамок ИД
усиливаются усилителем "У" /УНЧ
- Х/9
преобразуются далее фазочувствительным
выпрямителем "ФЧВ" /типа ФЧВ - I/.
После "ФЧВ" сигналы поступают
на выходные контакты KB-I6-I
в качестве сигнала отклонения от
заданной барометрической высоты.
Величина и полярность этих сигналов
определяются величиной и направлением
изменения Н полёта.
Рис.
3.15. Структурная
схема KB-I6.
Из
анализа структурной схемы KB-I6-1
видно, что в отличив от КВ-IIY
автопилота АП-155 рассматриваемый
корректор высоты следящих систем
не имеет. Поэтому режим согласования
как таковой в KB-I6-I
отсутствует, а перемещения ЧЭ при
согласовании передаются только до
якоря ЭМ.
Кинематическая
схема KB-I6-I
показана на рис. 3.15. При изменении
барометрической высоты полёта деформация
анероида "I"
через биметаллический термокомпенсатор
первого рода, «IO»
и передаточный механизм "сектор-трибка"
"2" преобразуется во вращательное
движение входного вала "3"
электромагнитной муфты сцепления "4".
Если на эту муфту подано питание, то
вращение вала "3" через штифты
"5" передаётся на рамки индукционного
датчика "9" с наклеенными на них
сигнальными обмотками т.е на якорь
индукционного датчика. Смещение
якоря «9» относительно неподвижных
катушек возбуждения "8" определяет
выходной сигнал индукционного датчика.
Из рис. 3.15. видно, что якорь "9" может
двигаться только после расцепления
рычагов "6" фиксатора "7".
Питание на фиксатор "7" подаётся
в момент включения KB-I6-I
и поэтому якорь, "9" освобождается
одновременно со срабатыванием муфты
«4». После отключения KB-I6-1
фиксатор обеспечивает установку якоря
"9" в нейтральное положение. Диапазон
рабочего отклонения якоря индукционного
датчика составляет +/-10
+ 12°, что соответствует изменению высоты
примерно на +/-1000
+ 1200м. Особенности конструкции
индукционного датчика, однако,
ограничивают изменение высоты в сторону
уменьшения от заданной, величиной 700 -
800 м. В сторону увеличения изменение
высоты не ограничено. Указанное замечание
очевидно, не существенно в полёте, но
при наземных проверках требует
обязательного учёта /так как САУ не
возвращает самолёт на заданную высоту/.
Рис
3.16.
Характеристики: а) анероидной коробки;
в) индукционного датчика; б) схема
индукционного датчика.
Характеристики
анероидной коробки, индукционного
датчика и схема индукционного датчика
приведены на рис, 3.16 .
Помимо
выше рассмотренного в состав KB-I6-I
входит также зуммер. Зуммер включается
одновременно с муфтой и фиксатором; и
с помощью двигателя постоянного тока
обеспечивает небольшую вибрацию корпуса
KB-I6
с частотой 3-10Гц. Благодаря такой вибрации
удаётся уменьшить затирания, трения в
элементах кинематики и за счёт этого
уменьшить зону нечувствительности и
гистерезис корректора высоты,
-
напряжение питания постоянного тока
...........27В ;
переменного
тока…....... 36В ;
-
рабочий диапазон высот .....…………………......
200 - 30 000 м
-
зона нечувствительности, не более ± 5
м…….на Н = 1км;
10
м ……..на Н=10 км;
36
м……...на Н=20 км;
±/40+150/м
наH-2I-30
км
;
-
масса не более .……………………………….......
1,35 кг.
Датчик
положения ручки ДПР - 23 предназначен
для выдачи в СДУ сигнала, пропорционального
поперечному /креновому/ перемещению
ручки управления самолётом. Сигнал
перемещения ручки
-
напряжение питания потенциометра
............. 10B;
-
сопротивление потенциометра ……….......…
600 - 1200 Ом
-
масса, не более ..........……………………........
0,2 кг.
Основные
отличия САУ от автопилотов заключайся
в большей развитости функций САУ,
связанных с траекторным управлением,
в улучшении пилотажных свойств ЛА и в
выполнении функций активного
управления.
Автопилоты же/практически всех типов/
предназначаются только для стабилизации
углового положения ЛА , демпфирования
короткопериодических колебаний,
стабилизации высоты полёта и приведения
к горизонтальному полёту из любого
пространственного положения.
Автопилоты
занимают промежуточное положение между
демпферами, автоматами устойчивости
и САУ. Схемы включения исполнительной
части /рулевых агрегатов / автопилотов
и САУ в проводку управления ЛА почти
одинаковы.
По
способу включения рулевых агрегатов
в проводку управления различают две
группы автопилотов:
-
автопилоты последовательного типа;
-
автопилоты параллельного типа. САУ
практически всех типов используют
последовательное включение рулевых
агрегатов.
I.
Автопилоты последовательного типа, -
используют рулевой агрегат - раздвижную
тягу / РАУ - 107 /, устанавливаемый в разрыв
проводки управления. В этом случае
перемещения ручки и рулевого агрегата
складываются и суммарное перемещение
передаётся па золотник бустера.
Управление ЛА осуществляется единой
ручкой управления как при включенном,
так и при выключенном автопилоте:
Рис
4.1
Для
обеспечения безопасности полёта при
отказе автопилота последовательного
типа отклонение рулей под действием
рулевмх агрегатов ограничивают малыми
углами. К таким автопилотам относится
аьтопилот АП - 155.
2.
Автопилоты параллельного типа -
отличаются тем что рулевые агрегаты
подключаются параллельно с основной
ручкой управления РУ:
Рис
4.2
При
перемещении РУ одновременно перемещается
шток рулевого агрегата РА. По этой
причине осуществлять ручное управление
самолётом можно только при включенном
автопилоте или же при пересиливании
лётчиком рулевого агрегата РА. В
автопилотах данного типа обычно
предусматривается управление самолётом
через сам автопилот посредством
специальной рукоятки управления /
строевой рукоятки СР/. Для повышения
безопасности в автопилотах параллельного
типа, применяются различные схемы
отключения рулевых агрегатов и устройства
ограничения максимальных усилий
этих агрегатов до значений, при которых
лётчик может осуществлять пересиливание.
Часто предусматривается встроенный
контроль правильности отработки рулевым
агрегатом управляющих сигналов. К
автопилотам параллельного типа можно
отнести автопилот АП-28.
Под
управлением самолетом понимается
процесс изменения сил и моментов,
действующих на самолет, в целях
обеспечения его движения по заданной
траектории. Для обеспечения процесса
управления движением самолета в воздухе
и на земле на нем устанавливается
совокупность устройств, которая
называется системой управления
самолетом.
Система
управления современного самолета
включает в себя большое число частных
систем, работающих как независимо друг
от друга, так и совместно.
Система
управления параметрами движения
самолета в воздухе (скоростью и
положением в пространстве) называется
основной системой управления.
Остальная часть системы называется
дополнительной системой управления.
Сюда относится управление торможением
колес, поворотом переднего колеса,
уборкой и выпуском шасси и посадочной
механизации и др.
Следует
оговориться, что такое разделение чисто
условное, так как, например, выпуск
(уборка) механизации, шасси ведет и к
изменению параметров движения самолета.
В
данной главе рассматривается только
основная система управления
'самолетом.
Для
управления самолетом достаточно трех
органов управления. Это объясняется
тем, что у самолетов взаимосвязано
вращательное и поступательное
движения. Величина и направление
аэродинамических сил зависят от
положения самолета относительно
набегающего потока (от углов атаки,
скольжения и крена), поэтому управление
траекторией движения самолета
осуществляется с помощью управления
его угловым положением.
В
зависимости от назначения и схемы
самолета его управление может выполняться
различными средствами. У обычного
самолета для этого служат руль высоты
(управляемый стабилизатор), руль
направления и элероны (интерцепторы).
На самолете с крылом изменяемой
стреловидности — это элероны,
интерцепторы, руль направления и
дифференциально отклоняемый стабилизатор.
На самолетах «бесхвостка» — это
руль направления и элероны. На самолетах
ВПП для полета на малых скоростях (где
аэродинамические рули не эффективны)
применяются струйные (газовые) рули,
поворотные камеры двигателей и др.
Система
управления самолетом должна обеспечивать:
— управление
на всех режимах полета с необходимой
точностью;
— перемещения
командных рычагов в соответствии с
характером естественных рефлексов
человека;
— приемлемые
по величине усилия, прикладываемые
летчиком к рычагам управления;
— возможность
парирования отказов элементов (например,
автопилотов, демпферов и др.), обеспечивая
резервное время летчику для вмешательства
в управление самолетом;
— предупреждение
попадания самолета в недопустимые по
условиям безопасности режимы полета
(«подхват», «инерционное вращение» и
др.) с помощью специальных устройств
(автоматов безопасности).
Основные
принципы управления самолетом заключаются
в следующем. Летчик (или автоматическое
устройство), используя показания
приборов (сигналы соответствующих
датчиков), наблюдает за положением
самолета в пространстве и другими
параметрами движения. Он сравнивает
их фактические значения с заданными,
проводит анализ, вырабатывает решение
и, исполняя его, воздействует, на
командные рычаги управления.
В
результате этого воздействия отклоняются
органы управления, которые изменяют
силы и моменты, действующие на самолет.
О величине отклонения органов управления
летчик судит по усилиям, прикладываемым
к рычагам управления, изменению
положения органов управления и
параметров движения.
Суждение
о достаточности величин управляющего
воздействия зависит от реакции самолета
на это воздействие, т. е. от результатов
управления. Это значит, что обеспечение
управления самолетом возможно лишь
при наличии обратной связи. Таким
образом, для обеспечения управления
самолетом необходимы:
— источники
информации о поведении самолета в
результате управляющего воздействия
(авиагоризонт, указатель положения
самолета, указатель скорости, высотомер
и др.);
— устройства
для анализа полученной информации и
выработки решения( летчик или автопилот);
— исполнительные
устройства, с помощью которых отклоняются
органы управления.
Системы
управления самолетом можно классифицировать:
а)
по источнику
энергии, затрачиваемой на отклонение
рулей:
ручное
— за счет мускульной силы летчика;
буетерное
— за счет использования энергии
посторонних источников (как правило,
гидроусилителей);
б)
по степени участия летчика в управлении
самолетом:
— неавтоматические,
в которых все задачи по управлению
выполняет летчик;
‑‑ автоматические,
в которых все задачи управления
выполняются автопилотом;
— полуавтоматические,
в которых основное управляющее
воздействие осуществляет летчик, а
остальные устройства служат для
облегчения и улучшения качества
управления.
Для
выполнения главной задачи управления
самолетом — осуществления намеченного
(программного) плана полета — летчик
воздействует на самолет через органы
управления, изменяя его положение в
пространстве и скорость полета. Характер
этих воздействий летчик определяет
по несоответствию фактического режима
полета программному. При этом летчик
и самолет образуют единую систему, а
управление самолетом представляет
собой замкнутый процесс, состоящий
из последовательных действий летчика
и маневров самолета.
Успешность
полета самолета, очевидно, определяется
эффективностью комбинации «летчик
— система управления — самолет». От
летчика требуется высокая натренированность,
умение одновременно управлять
изменением одних координат и контролировать
допустимые значения других, в короткие
интервалы времени оценивать
создавшуюся ситуацию и принимать
правильные решения. Быстрые
изменения внешней обстановки делают
часто даже кратковременный полет
на современном самолете крайне
напряженным.
Перечисленные
трудности пилотирования современных
самолетов нередко заставляют считать,
что полная автоматизация управления
такими самолетами является наиболее
приемлемой. Однако многообразие
возможных ситуаций при выполнении
задания, во время взлета и, особенно,
во время посадки делает часто
затруднительным использование
автоматических систем управления без
вмешательства летчика.
Увеличение
эффективности комбинации «летчик —
система управления— самолет»
осуществляется путем «подбора» самолета
и его системы управления к человеку.
Конструируют самолет и его систему
управления таким образом, чтобы наиболее
полно использовать возможности
человека.
Сравним
свойства и возможности человека и
машины при управлении самолетом.
— сила
и скорость; машина реагирует быстрее
и с большей силой, а для человека
характерно постоянное нейромускульное
запаздывание, состасвляющее примерно
0,25—0,4 с;
— правильные
однообразные действия; машина работает
ритмичнее и точнее, она и отличие от
человека не утомляется от однообразия
действий;
— точность
и быстрота расчета независимо от
сложности задач;
— хорошая
«память»; машина способна быстро
«запоминать» понятия, формулы и
тексты;
— многоканальность
действия; в отличие от одноканального
действия человека, который способен
одновременно выполнять только такие
две операции, одна из которых не требует
активного внимания;
— сохранение
работоспособности в условиях изменения
высоты, перегрузки, температуры и т.
д.;
— способность
регистрировать сигналы, передаваемые
радиоволнами, инфракрасными и
ультразвуковыми лучами и т. д., а человек
чувствителен в основном лишь к звуковым
и световым сигналам (вкус, обоняние
и осязание не используются при
управлении).
Преимуществами
человека являются:
— способность
обобщать и воссоздавать события, образы
и постоянные величины по поступающим
сигналам, суммировать различные
раздражители в осмысленное целое;
— логическое
мышление; человек может из полученных
эмпирическим путем данных сделать
общие выводы, лежащие за пределами
возможностей машины;
— способность
к избирательной памяти, т. е. способность
применять в данной конкретной обстановке
опыт и знания, полученные из ранее
встречавшихся ситуаций;
— творческое
мышление и фантазия, воображение,
которые выходят за пределы собственного
опыта; поэтому он может предвидеть
и тем самым мысленно определить возможные
ситуации.
Благодаря
всему этому человек способен изменять
план действия в создавшейся обстановке
и может лучше, чем машина, работать
в аварийной ситуации. Включение человека
в систему управления значительно
повышает безопасность полета самолета,
расширяет возможности применения
самолета, существенно упрощает
автоматическую часть системы управления.
Поэтому
широкое распространение получили
системы неавтоматического управления
на дозвуковых самолетах и полуавтоматического
управления на около- и сверхзвуковых
самолетах.
Наиболее
перспективной и рациональной схемой
управления следует считать использование
автоматического управления,
контролируемого летчиком.
Систему
ручного неавтоматического управления
часто называют системой прямого
управления в отличие от непрямой (с
применением гидроусилителей) системы
управления.
Структурно-функциональная
схема прямого управления изображена
на рис. 61, а принципиальная схема — на
рис. 6.2
Рис.
6.1. Структурно-функциональная
схема прямого управления:
обратная
связь по положению самолета; 2 — обратная
связь но управляющему воздействию
Основным
элементом такой системы управления
является летчик. Воздействуя на
командные рычаги управления (КРУ),
летчик с помощью проводки управления
отклоняет органы управления (рули
высоты, направления и элероны); При этом
изменяются аэродинамические силы и
моменты несущих поверхностей и самолет
изменяет параметры своего движения.
Система прямого
управления включает два вида обратных
связей (ОС):
1)
по регулируемому параметру (т. е. по
положению самолета);
2)
по управляющему воздействию (по усилиям).
Рис.
6.2. Принципиальная
схема прямого управления
1
— педали, 2 — штурвал, 3 — элерон, 4 —
тяги управления, 5 — руль направления,
6 — руль высоты, 7 — штурвальная колонка
Второй
вид обратной связи осуществляется
через командные рычаги управления
посредством усилия Р
ручки (рис.
6.3), возникающего за счет действия
шарнирного момента Мш
= YрС.
Эта обратная связь позволяет летчику
оценивать величину своего управляющего
воздействия.
Рис.
6.3. Принцип
образования усилия на ручке управления
По
изменению усилия летчик дозирует
создаваемые перегрузки, чувствует
изменение скорости полета.
В
процессе эксплуатации самолета
установлены оптимальные усилия, которые
должен был бы приложить летчик при
максимальном отклонении командных
рычага он на режиме, соответствующем
0,8Vмакс.
Приведенные
усилия, очевидно, требуют, чтобы шарнирные
моменты (Мш)
отклоненных рулей не превышали
определенной величины.
Величина
шарнирного момента обеспечивается в
заданных пределах за счет применения
осевой аэродинамической компенсации,
суть которой заключается в сближении
оси вращения с центром давления руля
(рис. 6.4).
Рис.
6.4. Осевая
аэродинамическая компенсация: 1; 2 —ось
вращения 2; 3 —ц.д руля
При
больших значениях Мш
кроме осевой компенсации на рулях
устанавливают сервокомпенсаторы
(флетнеры). При отклонении рулей
сервокомпенсаторы отклоняются в
противоположную сторону, соответственно
перераспределяя давление на руле и
уменьшая величину шарнирного момента
(рис. 6.5).
Рис.
6.5.
Сервокомпенсатор
На
некоторых современных тяжелых самолетах
используется управление с помощью
серворулей (рис. 6.6). Здесь летчик,
перемещая командные рычаги, отклоняет
не рули, а малые серворули, установленные
на концах рулей. За счет шарнирного
момента серворуля свободно подвешенный
руль отклоняется и балансируется
на определенном угле 8Р. Шарнирный
момент серворуля небольшой, и усилия,
прикладываемые летчиком к командному
рычагу управления, также малы.
Рис.
6.6. Серворуль
При
длительном полете с отклоненными рулями
летчик может \ меньшим, усилия на рычагах
за счет отклонения триммеров (рис 6.7),
работающих по принципу сервокомпенсатора,
но имеющих автономное управление.
Рис.
6.7. Триммер:
1 ‑ штурвальчик управления триммером;
2
— командному рычагу
Система
прямого управления иключает следующие
агрегаты Командные рычаги управления.
Они проектируются так, чтобы их отклонение
соответствовало естественным движениям
летчика (ручка от себя — самолет вниз,
ручки влево — крен влево и т. д )
Перемещения рычагов выбираются так,
чтобы их максимальные значения получались
за счет движения только рук и ног (без
изменения положения корпуса):
— движение
ручки (колонки) от себя — 150—180 мм, на
себя — 200—250 мм;
— движение
ручки вправо-влево— 150—200 мм;
— движение
штурвала вправо-влево—±50°;
— движение
педалей вперед-назад — 70—100 мм,
Рис.
6.8. Командный
рычаг управления креном и тангажом
истребителя
1,
2 — шарниры, 3 — тяга управления рулем
высоты 4 — труба;
б
— тяга управления элеронами
При
этом управление рулем высоты (тангажом)
и элеронами (креном) осуществляется на
легких самолетах одним командным
рычагом — ручкой. Для обеспечения
независимости управления по тангажу
и крену при отклонениях ручки необходимо
наличие двух степеней свободы. На рис.
6.8 показана одна из возможных схем
командного рычага управления креном
и тангажом истребителя
Для
управления рулем высоты ручка отклоняется
относительно шарнира 1 при неподвижной
трубе 4. Для управления элеронами ручка
отклоняется относительно шарнира 2 при
неподвижной тяге 3.
На
транспортных самолетах и самолетах
бомбардировочной авиации, где необходимо
создавать большие управляющие усилия,
используются штурвальные колонки,
перемещаемые двумя руками (рис. 149).
Управление рулем высоты осуществляется
за счет отклонения колонки относительно
шарнира 1 и перемещения
тяги 2. Управление
элеронами осуществляется за счет
поворота штурвала и соответствующего
перемещения тросов 3,
проходящих
по оси цапф.
Рис.
6.9. Штурвальная
колонка:
1
— шарнир; 2 — тяга управления рулем
высоты, 3 — трос управления элеронами
На
современных тяжелых самолетах колонки,
требующие значительного места для
своего размещения, выносят за приборную
доску кабины, выполняя их скользящими
(с горизонтальной трубой).
Из
этих же соображений находят применение
спаренные колонки управления, которые
одновременно увеличивают жесткость
продольного управления самолетом.
Для
управления рулем направления (курсом)
на всех типах(самолетов используются
ножные педали. На легких самолетах их
обычно выполняют параллелограммного
типа (рис. 6.10), а, на тяжелых самолетах
— подвесного типа (рис. 6.11). В обеих
Схемах перемещение педалей вперед-назад
вызывает перемещение тяг (тросов),
идущих к рулям направления.
Проводка
управления. Она может выполняться
жесткой, гибкой и смешанной.
Рис.6.10.
Ножные педали параллелограммного
типа:
1
— педали; 2 — тяга руля направления
Рис.
6.11. Ножные
педали подвесного типа:
1-педали;
2 - тяга руля направления
Жесткий
приводка (рис. 6.12) состоит из тяг 1,
последовательно соединенных между
собой, рычагов 2, качалок 3 и роликовых
направляющих 4. Тяги прокладываются в
роликовых направляющих (рис. 6.12, б) или
на качалках-3. Во избежание заклинивания
тяг при деформациях планера в полете
прямолинейные1 участки (в роликовых
направляющих) перемежаются свободными
звеньями с — с (рис. 6.12). На участках с
роликовыми направляющими для
уменьшения износа тяги, контактирующие
с роликами, часто выполняются из
стали. Для уменьшения веса эти тяги
делаются короткими.
Рис.
6.12. Жесткая
проводка управления:
а
—схема прямого управления, б —роликовая
направляющая, в — регулировочный
наконечник тяги, 1 — тяги, 2 — рычаг,
3, 5 — качалки, 4 — роликовые направляющие,
6 — контрольное отверстие, 7 — ролики
Сами
тяги подвергаются знакопеременным
напряжениям сжатия и растяжения при
отклонении рулей, а также испытывают
значительные вибрационные нагрузки,
вызванные работой силовых установок,
динамическими нагрузками при ^взлете
и посадке. Для уменьшения вибрации тяг
стремятся сдвинуть частоты собственных
колебаний тяг от резонансного режима.
Частота
собственных колебаний тяг
где
l—длина
тяги, см;
Е-—модуль
упругости, кгс/см2;
I—момент
инерции, см4;
Е1—изгибная
жесткость, кгс-см2;
т—погонная
масса тяги, кгс*с2/см2.
Частоту
собственных колебаний тяг увеличивают
за счет уменьшения длины тяг — l
и увеличением момента инерции сечения
тяги Для регулировки нейтрального
положения рулей в процессе эксплуатации
часть тяг выполняют с регулировочными
наконечниками (рис. 6.12, б). Роликовые
направляющие (рис. 6.12,6) служат опорами
тяг, и расстояние между ними определяет
эффективную длину тяги l
Ролики могут выполняться пластмассовыми,
стальными, дюралюминиевыми с регулируемыми
в процессе эксплуатации зазором.
В
местах поворота проводки управления
устанавливаются рычаги 2
или качалки
5. Различают поддерживающие качалки,
исключающие касание проводки окружающие
деталей и обшивки, и переходные,
изменяющие направление движения
или передаточное число.
Рис.
6.13. Принцип
дифференциального отклонения элеронов:
а
— зависимость коэффициента подъемной
силы от угла атаки (угла отклонения
элеронов); б — распределение подъемных
сил по размаху крыла
На
некоторых самолетах с повышенной
поперечной устойчивостью для создания
достаточного кренящего момента
необходимы большие углы отклонения
элеронов. На предпосадочном
планировании (на больших углах атаки)
отклонение элерона на большой угол
вниз может привести к срывному режиму
обтекания, а эффективность элерона,
отклоненного вверх, понижена
(рис.6.13). В результате уменьшаются
подъемные силы полукрыльев и кренящий
момент. Необходимые величины подъемных
сил полукрыльев в этом случае
получают за счет дифференциального
отклонения элеронов: вверх их
отклоняют на больший угол, чем вниз.
Для обеспечения дифференциального
отклонения элеронов в проводку управления
включают дифференциальные качалки
(рис. 6.14), к одному из плеч которых тяга
подходит под углом, меньшим чем 90°.
Рис.
6.14. Дифференциальная
качалка
Гибкая
(тросовая) проводка
(рис. 6,15) включает тросы 1, секторные
качалки 3, направляющие ролики 2 и тандеры
4. Тросы работают только на растяжение,
поэтому гибкая проводка 1ребует установки
двух тросов. Выполняются тросы диаметром
2,5—8 мм из стальных нитей с в=170—240
кгс/мм2.
Рис.
6.15. Гибкая
(тросовая) проводка.
Секторные
качалки 3 обеспечивают постоянство
длины натянутого и ослабленного тросов,
кроме того, они предотвращает вытяжку
тросов и возникновение ударных нагрузок
в тросах при перекладке рулей. Направляющие
ролики (рис. 6.15, б) с углублением под
тросы устанавливаются в местах поворота
проводки на шариковых подшипниках.
Для обеспечения необходимой длины и
натяжения тросо» при сборке н » процессе
эксплуатации на отдельных участках
прополки уетапаилшшются тандеры (рис.
6.15, в).
Каждая
из проводок имеет свои положительные
и отрицательные стороны. Тросовая
проводка легче жесткой, разрушающие
напряжения плетеной стальной проволоки
очень велики. Однако из-за вытяжки
тросов в процессе эксплуатации появляются
люфты в управлении и, как следствие,
запаздывание в отклонении рулей при
отклонении командных рычагов. Правда,
предварительной вытяжкой удается
уменьшить эксплуатационное провисание
тросов, но тем не менее на маневренных
самолетах используется в основном
только жесткая проводка, обладающая к
тому же высокой боевой живучестью.
Недостатком
жесткой проводки является потребность
в больших свободных объемах для ее
размещения (в отличие от гибкой), поэтому
ее часто выносят за обводы фюзеляжа,
закрывая соответствующими обтекателями.
В
эксплуатационном отношении преимущество
имеет жесткая проводка. При изменении
температуры удлинения дюралюминиевых
тяг и фюзеляжа одинаковые, а стальных
тросов и фюзеляжа различные.
Действительно, при изменении температуры
изменяются и линейные размеры
проводки и планера самолета:
где
l—конечная
длина детали, см;
lо—начальная
длина детали, см;
—коэффициент
линейного расширения, 1/°С;
t°—температура
детали, ° С.
Для
деталей, выполненных из различных
материалов, например дюралюминия и
стали:
Так
как
,
а
при
(например,
полет на высоте 10км) и
На
некоторых самолетах отдельные рули
выполняют двоякую задачу. Так, на
самолетах типа «бесхвостка», не имеющих
горизонтального оперения, рули на
крыле — элевоны выполняют роль и
элеронов, и рулей высоты. В первом случае
они должны отклоyяться
в разные стороны на полукрылъях, а во
втором случае - в одну сторону. На
самолетах с крылом изменяемой
стреловидности при больших углах к
схема поперечной управляемости с
элеронами становится неэффективной
(с увеличением х падает несущая
способность крыла с элероном и уменьшается
плечо, а следова телыю, и управляющий
момент Мх.
Для
поперечной управляемости на них
используется дифференциально
управляемый стабилизатор,
половины которого отклоняются в
одну сторону при управлении тангажом,
и в разные стороны при управлении
креном.
Рис.
6.6. Дифференциальный
механизм!
1,2
— тяги
отклонения половин руля
Для
обеспечения дифференциального отклонения
перечисленных рулевых поверхностей
в проводку управления включают
дифференциальные механизмы, например
на командных рычагах, принцип действия
которых ясен из рассмотрения рис. 66.
Полет
на больших около- и сверхзвуковых
скоростях сопровождается резким
увеличением шарнирных моментов, а
следовательно, и усилий на командном
рычаге управления. Вследствие этого
прямое управление сверхзвуковым
самолетом становится практически
невозможным, так как средствами
аэродинамической компенсации не удается
уменьшить до нормированных величин
усилия на ручке. Кроме того, при переходе
через У=Укр
эти усилия
меняют свой знак, что исключает дозировку
управляющих движений по усилиям. Также
значительно растут усилия на ручке и
на тяжелых дозвуковых самолетах, где
применяются рули большой площади.
Таким образом, возникла необходимость
уменьшения управляющих усилий за
счет включения в систему управления
силового привода, использующего для
отклонения рулей (преодоления
шарнирного момента) энергию от
постороннего источника Такие системы
управления со следящим силовым приводом
и совокупностью устройств,
обеспечивающих требуемые характеристики
управляемости самолета, называют
системами
непрямого управления.
Принципиальная
схема системы непрямого управления
(рис. 7.1) включает командные рычаги
управления, проводку управления,
следящий силовой привод с источником
энергии и органы управления.
Рис.
7.1,
Принципиальная схема непрямого
управления:
1
— рычаг управления; 2 —- проводка
управления; 3 — узел крепления силового
привода; 4 —распределительное устройство;
5 —магистрали питания; 6 — силовой
привод; 7 — шток; 8 — руль; 9 — источник
энергии
Летчик,
отклоняя командный рычаг управления
l,
отклоняет не руль непосредственно (как
при прямом управлении), а элемент
распределительного устройства 4. Им
может быть контакт потенциометра
или якорь сельсина (при электрическом
силовом приводе), золотник, заслонка,
струйная трубка (при гидравлическом
или пневматическом силовом приводе).
Энергия
по магистралям питания 5 подается к
силовому приводу 6, который перемещает
шток 7 и отклоняет руль 8, преодолевая
усилие Рш=Мш/h.
В такой системе управления вся нагрузка
с руля передается на силовой привод и
с него через узел крепления 3
на планер
самолета. Летчик затрачивает лишь
усилия, необходимые для преодоления
сил трения в проводке управления 2
и перемещения
элемента распределительного устройства.
Так как каждому положению командного
рычага управления / должно соответствовать
определенное положение руля, силовой
привод обязательно делают следящим за
счет включения обратной связи между
силовым приводом и распределительным
устройством.
Для
улучшения динамики управляемого
движения в систему полуавтоматического
управления включаются различного рода
автоматические устройства.
Принципиальные
схемы непрямого управления с такими
устройствами будут показаны ниже.
Наибольшее
распространение в системах управления
получили гидравлические следящие
приводы — гидроусилители
(бустеры).
Гидроусилитель
предназначен для усиления сигналов
управления и отклонения органов
управления самолета в соответствии с
перемещением командных рычагов.
Гидроусилитель
(рис. 7.2) состоит из силового цилиндра
4 и распределительного золотникового
устройства /, направляющего поток
жидкости по каналам с и с? в ту или иную
полость цилиндра. Обратная связь
осуществляется за счет размещения
корпуса 2 золотникового распределителя
на штоке поршня 3 силового цилиндра
4.
При
взятии летчиком ручки на себя канал с
(и полость Б силового цилиндра)
соединяется с магистралью давления
гидросистемы, а канал д. (и полость
А силового цилиндра) —с магистралью
слива. За счет разности давления в
полостях Б к А поршень,
а с ним шток
и nтяга,
соединенная с рулем, начинают двигаться
влево, отклоняя руль. Непрерывное
перемещение штока (отклонение руля)
по (можно лишь в случае, когда открыты
каналы с и d.
Если летчик остановил ручку управления
(а следовательно, и золотник), шток,
смещаясь влево, надвинет корпус 2
золотника
на золотник. По мере перекрытия каналов
сии скорость движения штока начнет
уменьшаться, а при полном закрытии
каналов шток остановится. Руль окажется
отклоненным на определенный угол
соответственно положению ручки
управления (золотника).
Рис.
7.2. Принцип
устройства гидроусилителя: 1 —
золотниковое устройство, 2 —- корпус,
3 — поршень; 4 — силовой цилиндр
В
настоящее время применяется большое
количество различных типов гидроусилителей.
Это гидроусилители с подвижным штоком
или подвижным корпусом, с цилиндрическим
и плоским золотниковым устройством,
крановым распределителем и др.
Для
обеспечения надежного запирания каналов
гидросистемы управляющим золотником
и уменьшения утечки жидкости конструктивно
предусматривается некоторое перекрытие
(х0)
золотником краев отверстий
гидромагистрали (рис. 7.3,6). Это перекрытие
является причиной возникновения
зоны-нечувствительности системы
управления, т. е. отклонение командного
рычага не сразу вызывает отклонение
рулей. Для уменьшения зоны нечувствительности
в конструкциях гидроусилителей
применяется дифференциальный рычаг
(рис. 7.3,а). При этом небольшое отклонение
ручки на величину а вызовет значительное
перемещение золотника (на величину в).
Рис.
7.3. Средства
надежного запирания каналов гидросистемы:
а
— система управления с дифференциальным
рычагом; б — перекрытие золотниковых
отверстий
В
последнее время на тяжелых самолетах
находят применение гидроусилители
вращательного действия, применение
которых обеспечивает значительно
большие мощности привода и повышенную
жесткость силовой части проводки
управления.
Недостатками
бустерной системы управления является
ее сложность и более низкая надежность
по сравнению с прямой системой управления.
Самым «капризным» элементом бустеров
является управляющий золотник 4 (рис.
7.4). Для повышения его надежности
применяют дублирующий золотник 3 (на
случай возможного заклинивании). В
бустерах устанавливаются дополнительные
фильтры особо
тонкой очистки гидросмеси. Наиболее
эффективным способом повышения
надежности системы управления являйся
резервирование отдельных агрегатов и
контуров, а также резервирование всей
системы. Так, на современных самолетах
широко применяется дублирование
питающей гидросистемы с помощью
золотника 1. Кроме основной гидросистемы
предусматривается одна, а то и две
аварийные гидросистемы, в том числе
одна работающая от автономного привода
(например, ветряка). Широко применяются
двухкамерные бустеры с питанием от
независимых гидросистем.
На
легких маневренных самолетах при отказе
всех имеющихся гидросистем предусматривается
прямое управление рулями.
В этом случае в конструкции гидроусилителя
предусматриваются специальные
устройства: клапаны кольцевания — 5 и
фиксатор 2
золотника.
Рис.
7.4. Средства
повышения надежности гидроусилителя:
1
— золотник включения дублирующих
гидросистем; 2 — фиксатор золотника; 3
— дублирующий золотник; 4 — управляющий
золотник; 5-клапан кольцевания; 6 —
основная гидросистема; 7 — дублирующая
гидросистема
На
современных тяжелых самолетах, где
значительные шарнирные моменты не
позволяют управлять рулями вручную,
для повышения надежности системы
управления рули разделяют на несколько
секций, каждая из которых приводится
отдельным бустером и специальной
гидросистемой. Таким образом, при отказе
одного бустера для управления самолетом
остается действующая часть секций
рулей, которые рассчитываются так,
чтобы обеспечить возможность продолжения
полета и аварийной посадки.
Системы
непрямого управления, построенные на
схеме, изображенной на рис.15.2, на практике
не могут быть использованы на самолете.
Это объясняется отсутствием обратной
связи по управляющему воздействию (по
усилиям на ручке). Управлять самолётом,
не ощущая усилий на рычагах управления,
ориентируясь, только по их перемещению,
практически невозможно. Обеспечивают
эту связь при непрямом управлении либо
за счет включении гидроусилителя по
обратимой схеме, либо за счет искусственного
создания усилий на командных рычагах
управления с Помощью различного рода
загрузочных механизмов.
Включение
гидроусилителей по обратимой схеме
(рис. 7.5)
предусматривает передачу части усилия
с руля на командный рычаг управления
(чсрез точки 2-3-4-6'). Характер управления
при такой схеме мало чем отличается от
обычного прямого управления. Однако
обратимая схема оказалась рациональной
лишь в узком диапазоне дозвуковых
скорости полета. На сверхзвуковых
скоростях знак шарнирного момента
может измениться на обратный, особенно
при использовании управляемого
стабилизатора, из-за перемещения назад
центра давления стабилизатора.
Следовательно, и усилия на ручке изменят
свой знак (вместо давящих тянущие),
что делает управление самолетом
невозможным.
Рис.
7.5. Включение
гидроусилителей по обратимой схеме
Поэтому
на современных сверхзвуковых самолетах
гидроусилители включаются в систему
управления по необратимой схеме
(рис. 15.2), рассмотренной выше. Такая
схема включения гидроусилителей
требует применения специальных
загрузочных механизмов для формирования
усилий на рычагах управления.
Загрузочные
механизмы (ЗМ)
выполняются пружинными, пневматическими
и гидравлическими. Наибольшее
распространение получили пружинные
загрузочные механизмы (одно-, двух-,
трех-пружинные).
При
отклонении простейшего однопружинного
загружателя в ту или иную сторону
летчик сжимает пружину и таким образом
":ощущает» усилие на ручке. Величина
этого усилия пропорциональна
жесткости пружины и величине ее
деформации (рис. 7.6). при таком загружателе
изменение усилия на ручке будет
пропорционально только величине
отклонения ручки. При прямом же травлении
усилия на ручке пропорциональны величине
Мш,
т. е. висят от угла атаки, скорости полета
(числа М). Так, например, полете на больших
дозвуковых скоростях эффективность
рулей увеличивается и требуются меньшие
углы их отклонения. Следовательно,
рычаг управления нужно отклонять
незначительно и усиления, создаваемые
загрузочным механизмом, окажутся
малыми, летчику трудно будет правильно
дозировать отклонение. Поэтому а
самолетах, обладающих большим диапазоном
скоростей полета, применяют загрузочные
механизмы с нелинейной характеристикой
(рис. 7.7). В этом
трсхпружинном загружателе малые пружины
имеют большую жесткость (крутую
характеристику 2), а большая пружина —
малую жесткость (пологую характеристику
1), причём большой пружине обеспечивают
предварительную затяжку до Р0
(рис. 7.7, б), благодаря чему при перемещении
штока загрузочного механизма на
величину х<х
пружина не деформируется. При малых
отклонениях ручки сжимается вначале
малая жесткая пружина, обеспечивая на
этих режимах крутой рост усилия на
ручке. При значительных отклонениях
ручки (хпр>х)
вступает в работу более мягкая большая
пружина.
Рис.
7.6. Включение
загрузочного механизма
Увеличением
числа пружин в пакете и соответствующей
предварительной их затяжкой можно
реализовать загрузочный механизм
с большим числом изломов.
Иногда
приемлемые характеристики загрузки
командных рычагов обеспечиваются
установкой не одного, а двух параллельных
загрузочных механизмов: полетного и
взлетно-посадочного. На взлете и посадке
работает один загрузочный механизм. В
полете на большой скорости (при увеличении
эффективности рулей) включается
второй загрузочный механизм. Нагрузки
на командном рычаге увеличиваются, чем
ограничиваются и предупреждаются
резкие отклонения рулей и выход самолета
на [ опасные перегрузки. Иногда подобные
дополнительные загрузочные механизмы
ставятся в канале управления курсом
для ограничения отклонения руля поворота
при больших скоростных напорах.
Рассмотренные
пружинные загрузочные механизмы находят
широкое применение в непрямых системах
управления самолетами, главным образом
в системах управления элеронами и рулем
направления, но их установка в канал
управления рулем высоты (стабилизатором)
не позволяет получить удовлетворительный
закон загрузки ручки (штурвала) с
учетом перегрузки, числа М и высоты
полета. Кроме того, загрузочные
механизмы, имеющие характеристики с
изломом, не позволяют летчику правильно
дозировать перемещения рычагов
управления на режимах, соответствующих
местам излома характеристики. Все это
привело к созданию ряда автоматов
загрузки, вводящих коррекцию по
скоростному напору, перегрузке,
числу М полета.
Рис.
7.7. Загрузочный
механизм с нелинейной характеристикой:
а
— трехпружинный загрузочный механизм,
б — характеристика трехпружинного
загрузочного механизма: 1 — большой
пружины, 2-малой пружины; 3 - область
предварительной затяжки
На
некоторых самолетах коррекция по
скоростному напору и числу М (высоте
полета) осуществляется с помощью
автомата регулирования загрузки
(АРЗ), изображенного на рис. 7.8.
Рис
7.8. Включение
автомата регулирования загрузки.
1
-командный
блок. 2 - автомат регулирования загрузки;
3 - загрузочный механизм
Автомат
регулирования загрузки
представляет собой электромеханизм
2, который
при изменении скоростного напора и
высоты полета отрабатывает и изменяет
плечо l.
Тем самым изменяется загрузка ручки
продольного управления самолетом.
Сигнал на отработку электромеханизма
поступает от командного блока 1.
Механизмы
триммерного эффекта.
Как известно,
при длительном полете на каком-либо
режиме даже небольшие нагрузки на
рычагах управления утомляют летчика.
При прямом управлении уменьшение
нагрузки на рычагах управления
обеспечивается за
счет отклонения
триммеров (рис. 6.7). При непрямом управлении
разгрузка командных рычагов управления
легко осуществляется аи счет включения
в систему механизма триммерного
эффекта-МТ (рис. 7.9, а).
Рис
7.9. Включение
механизма триммерного эффекта
а
система непрямого управления с механизмом
триммерного эффекта,
б
– принцип действия механизма триммерного
эффекта
Включая
электродвигатель и изменяя положение
точки в (рис 169 б) можно изменить и
натяжение пружины загрузочного
механизма. Так, если ручка обжала пружину
на величину а, а механизм триммерного
эффекта сдвинет корпус загружателя
влево на величину в=а, самолет будет
балансироваться при нулевых усилиях
на ручке управления.
С
помощью механизма триммерного эффекта
можно также осуществлять и управление
самолетом (аналогично триммерам или
серворулям). При чюм члскфоднигатель
будет отклонять свободную ручку, а
с ней и всю проводку управления и рули.
Как
известно, геометрические размеры рулей
(управляемых стабилизаторов) выбираются
из условия обеспечения достаточной их
эффективности на посадке, когда
скоростные напоры невелики, и на больших
высотах при М>1. На малой же высоте при
большой скорости самолет становится
слишком «строг» в управлении, так как
требует небольших перемещений командных
рычагов управления. Например, на одном
из современных истребителей на малой
высоте и скорости V=1000
км/ч изменение перегрузки пу
на единицу
требует отклонения стабилизатора на
угол
= 0,36°. Если при этом оставить передаточное
число неизменным, потребуется отклонить
ручку на величину xв
= 5 мм с тянущим усилием Рр = 0,6 кгс. Такие
малые значения перемещений не позволяют
летчику точно дозировать управляющие
воздействия. Для устранения этого
на самолетах применяют специальные
устройства, позволяющие уменьшать
передаточные отношения (увеличивать
потребное отклонение командного
рычага) при полетах на таких режимах.
Простейшие
механизмы нелинейной передачи
механическим путем уменьшают передаточное
число в зоне малых перемещений командного
рычага. Это осуществляется различными
способами. Так, например, в схеме с
кулисным механизмом (рис. 710, а)
нелинейность образуется за счет
возрастания проекции т
— т1
на направление
движения выходного звена.
Рис.
7.10 Кулисный
механизм нелинейной передачи:
а
—схема механизма, б — характеристика
механизма, 1 — вход от командного
рычага управления, 2 — выход к
гидроусичителю
Недостатком
таких нелинейных механизмов является
то, что изменение передаточного отношения
зависит от положения ручки, а не режима
полета.
Поэтому
в продольном канале управления
потребовалось применить специальные
автоматы, регулирующие передаточное
отношение (АРП) в зависимости от
режима полета (рис. 7.11). Автомат 2<
представляет собой качалку с изменяемой
длиной плеч в
(за счет
перемещения штока исполнительного
механизма). Сигнал на включение механизма
вырабатывается в командном блоке 1.
Рис.
7.11. Система
непрямого управления с автоматом,
регулирующим передаточное отношение
1 — командный блок АРП, 2 —автомат,
регулирующий передаточное отношение
Применение
двух различных автоматов (загрузки и
передаточного отношения) позволяет
обеспечить практически любой закон
управления (загрузки командного рычага
и отклонения органов управления)
без ухудшения маневренных свойств
самолета. Однако в этом случае требуются
два отдельных исполнительных механизма
со своими командными блоками.
Выше
мы выяснили, что при увеличении
скоростного напора необходимо увеличивать
загрузку командного рычага (плечо l
загрузочного механизма) и уменьшать
передаточное отношение
(плечо в). Таким
образом, при изменении режима полета
во всех случаях требуются противоположные
по знаку законы изменения передаточного
отношения и жесткости загрузочного
механизма Это позволило совместить
функции автоматов загрузки и переда
точных отношений в одном механизме.
Система непрямого управления с таким
автоматом регулирования управления
(рис 7.12) позволяет при изменении режима
полета одновременно изменять и величину
загрузки командного рычага и передаточное
отношение (угол отклонения
стабилизатора).
Использование
единого автомата регулирования
управления кроме очевидных достоинств
имеет и недостатки.Единый исполнительный
механизм огряничивает возможности
автомата, так как и величина загрузки
и передаточное число изменяются всегда
одновременно, что не соответствует
точным потребным законам их изменения
на всех режимах полета.
Демпферы
тангажа, крена и рыскания. Увеличение
скорости (V>а)
и высоты полета ведет к ухудшению
демпфирующих свойств самолета Формы
современных сверхзвуковых самолетов
(тонкий и симметричный профиль крыла
и оперения, большие углы стреловидности,
малые удлинения крыла) также ухудшают
демпфирующие свойства самолета, а
соответственно и характеристики
динамической устойчивости и управляемости.
Ухудшение
затухания собственных короткопериодических
колебаний современных самолетов
приводит к тому, что летчики пытаются
гасить их соответствующими отклонениями
рычагов управления (рулей). Однако
на сверхзвуковых скоростях и больших
высотах полета увеличивается запаздывание
реакции самолета на действие летчика
Это, а также запаздывание реакции
летчика на изменение режима полета
чаще всего приводит к тому, что летчик,
пытаясь погасить колебания, усиливает
их Возникает задача — обеспечить
демпфирование колебаний большой частоты
(малых движений), на Которые летчик не
в состоянии оказать влияние, причем
сделать это надо автоматически
Сущность
искусственного демпфирования состоит
в создании дополнительных моментов
(посредством органов управления),
противодействующих вращательным
движениям самолета (рис 7.13),
Дли успешного
выполнения задачи парирования колебаний
самолет демпферы должны обладать
большой чувствительностью н
быстродействием.
Рис.
7.13. Принцип
создания демпфирующих моментов за
счет отклонения рулей:
а
— демпфирование продольных колебаний
рулем высоты;
б
— демпфирование
поперечных колебаний элеронами, в —
демпфирование
путевых колебаний рулем направления
Конструктивно
демпфер состоит (рис. 7.14) и,) грех частей:
датчика угловой скорости (ДУС),
усилительного блока (УБ) и исполнительного
устройства — рулевого агрегата
управления (РАУ).
Рис.
7.14. Система
непрямого управления с демпфером
колебаний самолета
По
сигналу, пропорциональному угловой
скорости (ускорению), электромеханизм
рулевого агрегата управления перемещает
шток, а с ним и золотник гидроусилителя.
Гидроусилитель в свою очередь отклоняет
руль. При этом командный рычаг управления
остается неподвижным (обеспечивается
предварительной затяжкой пружины
ЗМ). '
Включение
демпфера в канал управления тангажом,
креном и курсом ограничивает маневренные
возможности самолета, так как демпфер
всегда несколько отклоняет рули в
сторону, противоположную вращению
самолета. Для
исключения «паразитного» отклонения
руля при выполнении маневра в схему
автомата демпфирования включают
специальный фильтр. Автоматы
балансировки. Как известно, на самолетах
со стреловидным крылом в некотором
диапазоне чисел М (от М1 до М2, рис. 7.15)
может наблюдаться неустойчивость
самолета по скорости. В этом диапазоне
чисел М летчик вынужден отклонять ручку
в непривычном для себя обратном
направлении: при разгоне— на себя,
а при торможении — от себя. При выполнении
маневров с порог ручками и с торможением,
если летчик не успеет отдать ручку от
себя, смещение фокуса вперед создает
значительный кабрирующий момент, растет
угол атаки и перегрузка. Это явление
называют скоростным подхватом. При нем
быстро создается аварийная ситуация-
Рис.
7.15. Зависимость
балансировочного усилия на ручке от
числа М полета и перегрузки
.
Неблагоприятный
характер изменения усилия на ручке в
области околозвуковых скоростей
полета можно устранить установкой
специального автомата балансировки
по схеме демпфера (рис. 7.14). Исполнительный
механизм (типа РАУ) такого автомата
в этом диапазоне чисел М предупредительно
отклоняет стабилизатор независимо
от положения ручки так, что летчик для
сохранения балансировки .самолета
вынужден продолжать отклонять ручку
в прежнем направлении (при разгоне —от
себя, а при торможении — на себя).
Автомат
продольной
устойчивости.
Как известно, при переходе самолета с
докритической на сверхкритическую
скорость полета фокус крыла самолета
смещается назад (рис. 7.16) и, как следствие,
увеличивается степень продольной
устойчивости самолета по перегрузке
Если
на сверхзвуковом самолете выбрать
центровку для обеспечения минимальной
степени устойчивости на дозвуковой
скорости (Хт1
), то на сверхзвуковой скорости
устойчивость окажется излишне большой.
Это приведет к ухудшению продольной
управляемости самолета и к большим
потерям качества на балансировку
Рис.
7.16. Зависимость
положения фокуса крыла самолета от
числа М полета
.
Если
же выбрать центровку, соответствующую
минимально допустимой устойчивое и на
сверхзвуковом режиме полета (Хт2),
то на дозвуковых
скоропих спмолет окажется неустойчивым.
Полет же на
неустойчивом по перегрузке самолёте
утомителен для летчика, ибо любое
возмущение ведет к прогрессивному
увеличению отклонения угла атаки о г
исходного значения и летчик вынужден
беспрерывно вмешиваться в управление.
Обеспечение нормальной степени
продольной статической устойчивости
по перегрузке на различных режимах
полета принципиально возможно тремя
путями:
Изменением
центровки самолета с помощью автомата
центровки (например, перекачиванием
топлива в специальный центровочный
бак) при изменении режима полета (рнс.
7.17).
Рис.
7.17. Автомат
центровки:
1—
перекачивающий насос, 2—центровочный
бак
3
Выбором центровки из условия обеспечения
нормальной _степени продольной
устойчивости на сверхзвуковой скорости
(рис. 7.16), а на дозвуковом режиме полета
применением автомата устойчивости
(сдвинуть фокус самолета назад).
Принцип
действия автомата устойчивости по
перегрузке заклю чается в создании
восстанавливающего продольного момент
отклонением стабилизатора (руля
высоты) в сторону прироста угла атаки
а: при увеличении а стабилизатор
отклоняется вверх, при уменьшении а—
вниз (рис. 7.19). Отклонение стабилизатор
I,
пропорциональное углу атаки (перегрузке
пу),
эквивалентно
смещению фокуса самолета назад.
Рис.
7 19.
Принцип действия автомата устойчивости
В
отличие от демпфера тангажа (рис.
15.14), у которого расход рулей на
демпфирование равен ±(2 ч-5°), раздвижная
тяга автомата продольной устойчивости
(рис. 1520) должна иметь ли значительный
ход для парирования изменений перегрузки.
Сигнал на срабатывание РАУ поступает
от датчика углов атаки («флюгарка»)
или акселерометра (датчик вертикальных
ускорений — ДВУ),
Рис.
7.20. Система
непрямого управления с автоматом
устойчивости
Условием
путевом устойчивости, как известно,
является расположение бокового фокуса,
сзади центра тяжести самолёта, что
может обеспечивайся размещением в
хвостовой части фюзеляжа киля. На
сверхзвуковых скоростях полета снижается
эффективность вертикального
оперения, которая усугубляется еще
и «затенением» киля фюзеляжем и крылом
на больших высотах вследствие
необходимости полета с большими углами
атаки.
Улучшить
путевую устойчивость только за счет
увеличения площади киля затруднительно,
ибо это ведет к увеличению размеров
и веса киля на 50—60% и соответствующему
смещению назад центровки самолета
Наибольший
эффект дает система повышения путевой
устойчивости с помощью автомата
путевой устойчивости. Принцип
действия его заключается в создании
восстанавливающего путевого момента
за счет отклонения руля направления
(аналогично автомату продольной
устойчивости). Датчиками автомата
путевой устойчивости являются
датчик угла скольжения
и датчик боковой перегрузки nz.
Автомат
поперечной устойчивости.
На современных
самолетах со стреловидным и треугольным
крыльями поперечная устойчивость
на различных режимах полета значительно
меняется. На дозвуковых скоростях
полета при крене и последующем скольжении
на опущенное полукрыло и меняются
эффективные углы стреловидности и
несущие «способности» полукрыльев
(рис. 7.21) Чем больше полетный угол атаки,
тем больше восстанавливающий момент
крени (рис. 7.21, а). Это неблагоприятно
сказывается на боковой устойчивости
самолета (возникает колебательная
неустойчивость). Для уменьшения
поперечной устойчивости самолета на
больших углах атаки успешно используется
установка крыла с отрицательным
углом поперечного V
(рис. 7.21, г).-
Рис.
7.21. Зависимость
поперечной устойчивости самолета от
угла атаки, угла стреловидности и угла
поперечного V
крыла
а
— зависимость коэффициента подъемной
силы от угла атаки и угла стреловидности
крыла б — изменение эффективного угла
стреловидности крыла при скольжении.
в — разность подъемных сил полукрыльев
при скольжении крыла с положительным
углом поперечного V;
е — разность подъемных сил полукрыльев
при скольжении крыла с отрицательным
углом поперечного V.
Однако
на околозвуковых скоростях полета
(малых углах 2)
поперечная устойчивость самолета
значительно уменьшается и может
даже стать обратной по знаку. Причиной
этого является несимметрия развития
волнового кризиса у левого и правого
полукрыла при скольжении (рис. 7.22).
У опущенного полукрыла (выдвинутого
вперед) из-за меньшего угла стреловидности
(
— )
волновой кризис развивается на меньшем
числе М.
И
в диапазоне от М1
до М2
изменение величин подъемных сил ведет
к изменению момента крена по знаку.
Здесь наблюдается обратная реакция
самолета на «дачу ноги». Если у
поперечного устойчивого самолета (на
ЛКМ:) отклонение руля направления вправо
вызывало правый крен, то при М2>М>М]
такое же отклонение руля вызовет левый
крен самолета. Все это значительно
усложняет управление самолетом.
Рис.
7.22. Зависимость
коэффициентов подъемных сил
полукрыльев
стреловидного крыла при его скольжении
от числа М полета: 1
— зона прямой реакции на «дачу ноги»;
2— зона обратной реакции на «дачу ноги»
Желаемые
характеристики поперечной устойчивости,
а соответственно и поперечной
управляемости на некоторых самолетах
обеспечивают с помощью автоматов
поперечной устойчивости, принцип
действия которых аналогичен принципу
действия автоматов продольной и путевой
устойчивости самолета (рис. 7.20).
Непрерывное
увеличение количества функций,
выполняемых автоматическими устройствами,
сопровождается увеличением различного
рода датчиков, преобразователей,
вычислителей, исполнительных устройств
и других элементов автоматического
оборудования, причем некоторые
автоматические устройства требуют
установки одних и тех же датчиков, а
исполнительные устройства (например,
раздвижная тяга) могут обслуживать ряд
автоматов.
Поэтому
в целях повышения надежности и уменьшения
веса , пег и тематические устройства
на современных самолетах объединяют
в единую систему автоматического
управления (САУ).
САУ
(рис. 7.23) позволяет осуществить
неавтоматическое, полуавтоматическое
и автоматическое управление самолетом.
Неавтоматическое
управление выполняет летчик, воздействующий
на рычаги управления с помощью
гидроусилителей.
Автоматическое
управление в целях безопасности полета
осуществляется с помощью двух
исполнительных устройств: рулевых
агрегатов управления (РАУ) и механизмов
триммерного эффекта (МТ), на которые
подаются управляющие сигналы,
вырабатываемые вычислителем (В).
Кроме того, в продольный канал включен
автомат регулирования управления
(АРУ). РАУ могут работать как в
автоматическом, так и в полуавтоматическом
режиме. Они контролируют сравнительно
небольшой диапазон отклонения рулей
и обеспечивают большую скорость их
отклонения (20—40 град/с).
Рис.
7.23. Комплексная
система автоматического управления
Механизмы
триммерного эффекта (МТ), включенные
параллельно в проводку управления, при
сравнительно небольшом быстродействии
(2—4 град/с) позволяют использовать весь
диапазон отклонения рулей. Вычислитель
(В) получает сигналы от датчиков
параметров движения и положения самолета
(ДДПС), а также от систем наведения (СН)
и систем навигации и посадки (СНП). В
соответствии с заданным режимом работы
(неавтоматическим, полуавтоматическим,
автоматическим) САУ обрабатывает
поступающие сигналы и формирует
управляющий сигнал, который подается
на исполнительные устройства (РАУ и
МТ) и на командно-пилотажные приборы
(КПП). Между вычислителем и исполнительными
механизмами устанавливается блок
безопасности (ББ). Он пропускает
только те сигналы, которые не превышают
предельно допустимые значения, и
формирует управляющие сигналы,
предупреждающие выход самолета на
опасный режим.
В
процессе эксплуатации системы управления
с гибкой проводкой тросы, работающие
на растяжение, вытягиваются, натяжение
их падает и жесткость проводки
уменьшается. Кроме того, натяжение
тросов изменяется при изменении
температуры воздуха. Поэтому в процессе
эксплуатации требуется систематический
контроль натяжения тросов. Натяжение
регулируется тандерами (рис. 615, в).
На современных'
самолетах для уменьшения натяжения
тросов в проводку включают пружинные
компенсаторы (рис. 7.24).
Характерными
неисправностями троенного управления
являются:
— «заершенность»
тросов (обрыв отдельных нитей) в местах
контакта их с направляющими роликами
и гермовыводами (в стенках гермокабин);
— износ
роликов и подшипников;
— срыв
наконечников тандеров при их большом
выходе из корпуса тандера. Для недопущения
этого при регулировке натяжения
необходимо через контрольные отверстия
(рис. 6.15, в) следить за выходом наконечников.
Рис.
7.24. Система
управления с пружинным компенсатором
Как
отмечалось выше, в системе с тросовым
управлением к органам управления
подводятся два троса. При ремонте или
регламентных работах необходимо
исключить возможность обратного
крепления тросов (перепутывания правого
и левого троса), ибо это ведет к обратному
отклонению рулей и тяжелому летному
происшествию.
Жесткая
проводка управления в процессе
эксплуатации подвергается
знакопеременным напряжениям и
значительным статическим и вибрационным
нагрузкам. Под действием этих нагрузок
возможно появление трещин на тягах,
узлах, качалках и рычагах. При
дальнейшей эксплуатации трещины могут
привести к разрушению этих механизмов
и тяжелому летному происшествию. Из-за
некоторого эксцентриситета приложения
нагрузки тяги прижимаются к роликам,
что ведет к износу тяг в процессе
эксплуатации.
Кроме
того, для жесткой проводки характерны
такие неисправности, как повышенный
люфт в проводке управления, разрушение
подшипников в наконечниках тяг и в
Качалках, срыв резьбы наконечников
тяг при их большом выходе из тяги (выход
контролируется с помощью контрольного
отверстия, рис. 6.12,0) и другие.
В
системе управления триммерами наблюдается
износ червячной п'ары отклонения
триммера, что на некоторых самолетах
приводит к повышенному люфту триммера
и триммерно-рулевому флаттеру.
Насыщение
систем управления современных самолетов
различными автоматическими
устройствами, переход к бустерному
управлению поставили перед
конструкторами трудные задачи по
обеспечению безопасности полета в
случае отказа этих устройств.
Повышение
безопасности полета на современных
сверхзвуковых самолетах обеспечивается:
1)
хорошими характеристиками устойчивости
и управляемости на всех режимах полета
самолета (как с помощью аэродинамической
компоновки самолета, так и, главным
образом, применением различного рода
автоматических устройств);
2)
сохранением надежности системы
управления путем повышения надежности
работы каждого из агрегатов; резервирования
отдельных агрегатов и контуров;
резервирования всей системы управления;
3)
включением в систему управления
специальных агрегатов и целых блоков
безопасности, предупреждающих выход
самолета на критические режимы.
Способы
обеспечения необходимых характеристик
устойчивости и управляемости самолетов
рассмотрены выше. Однако следует
отметить, что зачастую приходится
отказываться от применения на самолете
весьма полезных автоматов только из
соображений невозможности защитить
самолет от последствий выхода из строя
этих автоматов. Так, например, замыкание
цепи электродвигателя раздвижной тяги
автомата демпфирования или устойчивости
сопровождается уводом руля в крайнее
положение на угол, контролируемый
автоматом. Это особенно опасно при
взлете и посадке и в момент потери
самолетом устойчивости, например, по
перегрузке. Обрыв цепи обратной связи
автоматов демпфирования при их исправной
работе ведет к нарушению пропорциональности
угла отклонения руля угловой скорости
самолета. Рули будут отклоняться на
предельные углы, контролируемые
автоматом, и раскачают самолет. Для
повышения безопасности приходится
«доверять» автоматам малые углы (2—3°)
отклонения рулей.
При
отказах АРУ (рис. 7.12) или АРП (рис. 7.11) в
положении штока на малом плече
уменьшается диапазон углов отклонения
рулей, и их может «не хватить» при взлете
и особенно при посадке.
Во
всех этих устройствах приходится
применять сложные схемы дублирования
и компенсации ложных сигналов. Эффективным
средством повышения безопасности
полета при отказе автоматов и уводе
рулевой поверхности является применение
механизмов
приведения отказавшего автомата
(демпфирования,
устойчивости, балансировки, АРУ, АРП и
других) к
нейтрали. Такой
механизм срабатывает с помощью
специальных концевых выключателей как
только руль при «уводе» автомата
отклонится на предельную величину.
Кроме того, для повышения надежности
в одном канале управления устанавливают
последовательно два и более автоматов
демпфирования.
На
некоторых современных самолетах для
обеспечения безопасности полета на
случай отказа автоматических устройств
предусматриваются специальные
автоматы, ограничивающие выход самолета
на опасные режимы полета. Так, для
предотвращения выхода самолета на
закритические углы атаки и на максимально
допустимую перегрузку устанавливают
автоматы перегрузок. Па некоторых
самолетах при приближении к критическому
режиму полета по сигналу от датчика
углов атаки такой автомат предупреждает
летчика тряской ручки управления или
специальным световым или звуковым
сигналом. Если при этом летчик не дает
ручку от себя, то это за него делает
автомат.
На
других самолетах измерительный блок
ограничителя перегрузок замеряет
нормальное (акселерометром) и угловое
(гироскопом) ускорения и при возрастании
их выше определенного значения
мгновенно ставит стабилизатор (руль
высоты или элевон) нейтрально. После
этого у летчика есть время на принятие
необходимого решения.
Как
известно, самолеты со стреловидным и
треугольным крылом обладают повышенной
поперечной устойчивостью, особенно на
больших углах атаки. И при появлении
скольжения (в частности, при остановке
одного из разнесенных по размаху крыла
двигателей) быстро возникает большой
кренящий момент, .который летчик зачастую
не успевает парировать элеронами. Для
парирования скольжения и возникающего
крена на современных самолетах стали
применять специальные автоматы
скольжения (датчик — флюгер, измеряющий
угол скольжения) и автоматы компенсации
отказа двигателей (датчик следит за
режимом работы двигателей давлением
за турбиной). Исполнительные механизмы
тих автоматов успевают отклонять руль
направления и элероны в нужную сторону
для парирования разворота и крена.
104Системы
Автоматического
Управления
Учебное пособие
1. Ла как объект управления. Управляющие поверхности ла, Законы управления. Классификация систем управления полётом ла, Системы ручного управления ла.
6 Система прямого управления
7 Системы полуавтоматического и автоматического управления
Тема № 16 системы автоматического управления полётом летательных аппаратов (сау ла)
1. Ла как объект управления. Управляющие поверхности ла, Законы управления. Классификация систем управления полётом ла, Системы ручного управления ла.
1.2. Движение ла в пространстве.
1.3.Системы координат
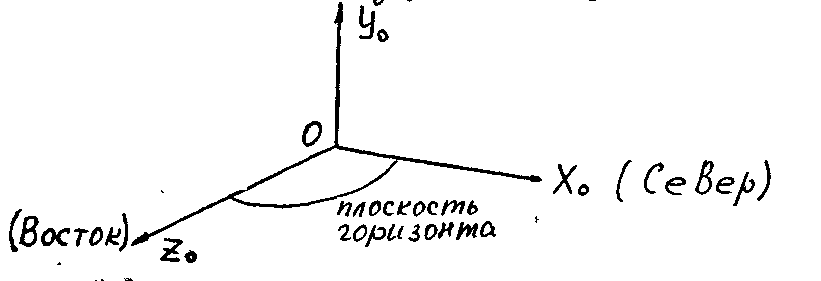
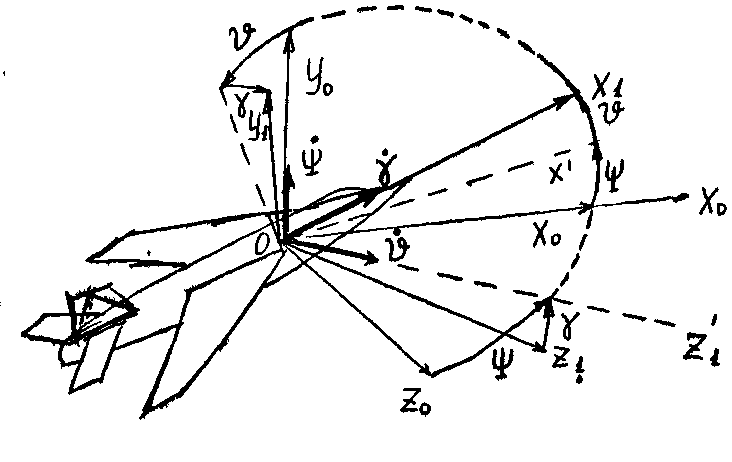

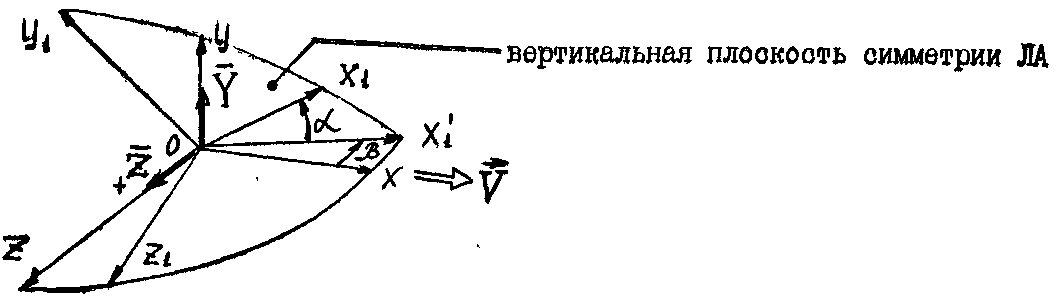
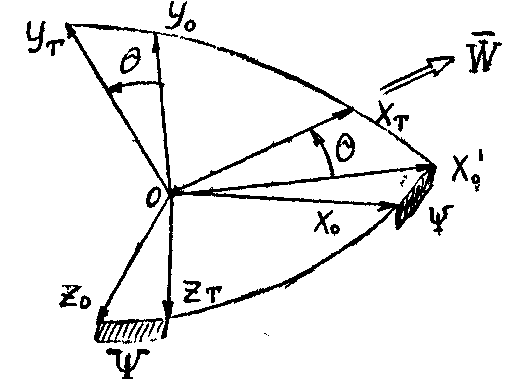
![]()
![]()
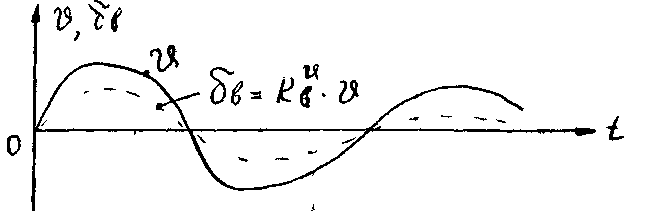
![]() очевидно, может изменить характер
переходного процесса, но не устраняет
колебания.
очевидно, может изменить характер
переходного процесса, но не устраняет
колебания.![]()
![]() - передаточное число поZ
- передаточное число поZЕсли начальное
![]() ,то
для малых отклонений
,то
для малых отклонений
![]()
![]()
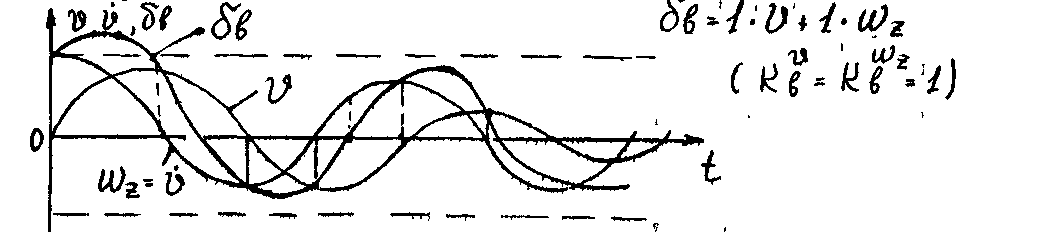
![]() Из
графика видно, что при максимальных
скоростях изменения
в точках=0
величина
Из
графика видно, что при максимальных
скоростях изменения
в точках=0
величина ![]()
![]() γ
γ![]() Кроме Указанных сигналов в каждый канал
лётчиком или;
какой-либо системой /навигационной,
прицельной и др, могут быгь введены
сигналы заданных параметров полета: С
учетом сделанных
замечаний законы управления для трех
каналов имеют вид;
Кроме Указанных сигналов в каждый канал
лётчиком или;
какой-либо системой /навигационной,
прицельной и др, могут быгь введены
сигналы заданных параметров полета: С
учетом сделанных
замечаний законы управления для трех
каналов имеют вид;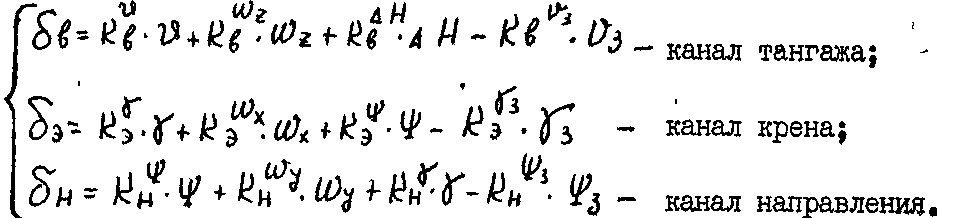
![]() ;
;![]() ;
;![]()
1.5 Классификация систем управления полётом ла.
1.6 Системы ручного управления ла.
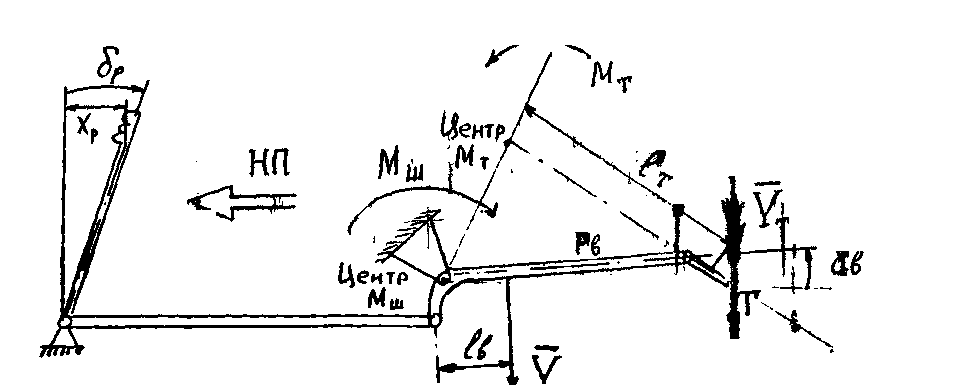

2 Системы автоматизированного управления: автоматы регулирования управления и загрузки / ' ару и арз /, демпферы колебаний. Понятие об автоматах устойчивости.
2.1 Автоматы «ару» и «арз» '
![]()
![]() -
градиент усилия на ручке управления;
-
градиент усилия на ручке управления; -
приращение усилия на ручке управления
;
-
приращение усилия на ручке управления
; -
приращение нормальной перегрузки./
16.6 / можно переписать:
-
приращение нормальной перегрузки./
16.6 / можно переписать:
![]() -
эффективность руля по перегрузке / где
nвy
- перерузка, возникающая при отклонении
руля высоты на 10С
-
эффективность руля по перегрузке / где
nвy
- перерузка, возникающая при отклонении
руля высоты на 10С![]() -
передаточное число от ручки к рулю;
-
передаточное число от ручки к рулю; -
обратная
величина жёсткости пружины механизма
загрузки
-
обратная
величина жёсткости пружины механизма
загрузки На
современных самолётах эффективность
руля
На
современных самолётах эффективность
руля
![]() изменяется в зависимости от режима
полёта /V
и Н/в4-5 раз, поэтому для поддержания
постоянства
изменяется в зависимости от режима
полёта /V
и Н/в4-5 раз, поэтому для поддержания
постоянства
![]() необходимо соответственно: изменять
передаточное число к рулю
необходимо соответственно: изменять
передаточное число к рулю
![]() или жёсткость загрузочной пружины
или жёсткость загрузочной пружины 2.2 Автомат регулирования управления ару- 3в
2.3 Автомат регулирования загрузки . Арз - I - 1а



2.4 Автоматы демпфирования,
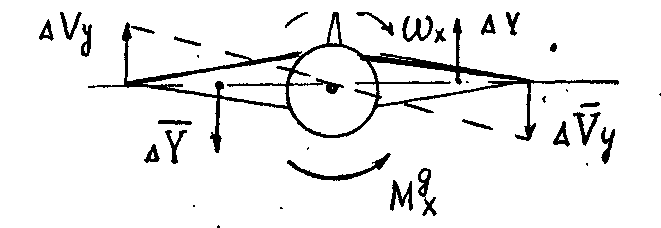
![]() , направленный на встречу вращению:
, направленный на встречу вращению: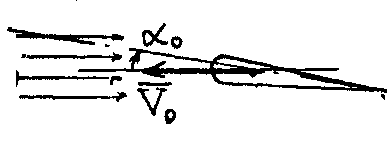

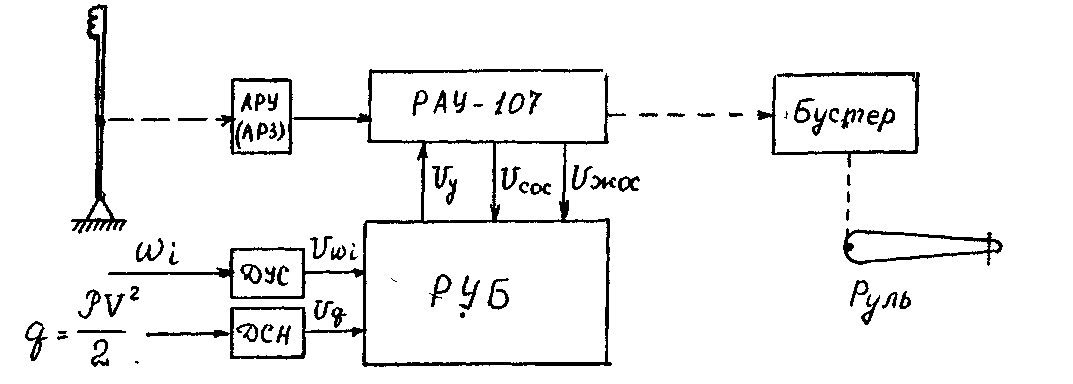

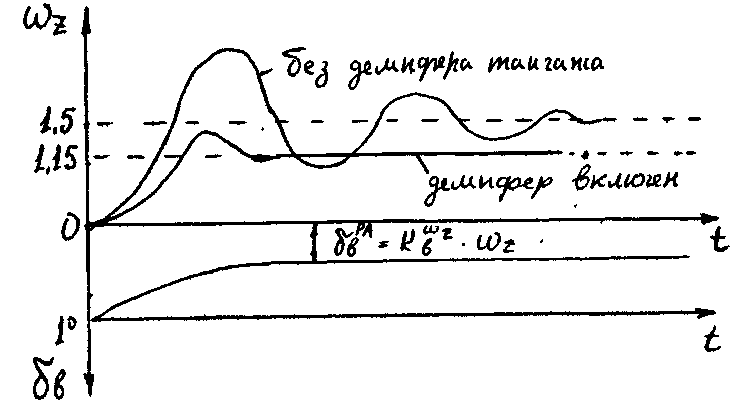
![]()
2.5. Типовые демпферы колебаний

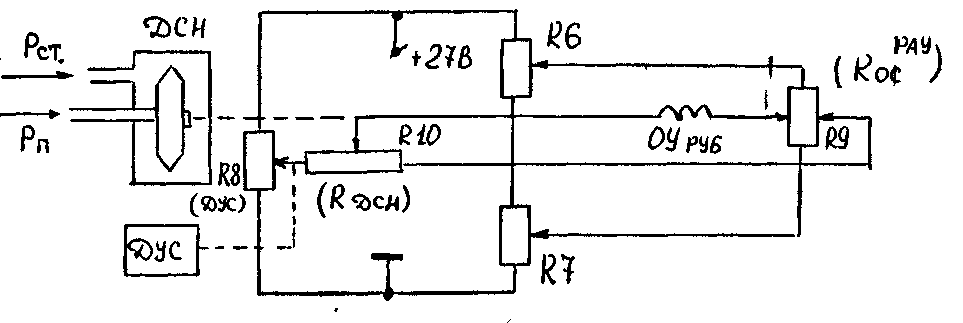
![]() -
канал тангажа;
-
канал тангажа;![]() -
канал рысканья
-
канал рысканья![]() является датчик угловой скорости ДУС-
Т. Буква Т означает принадлежность
ДУС к каналу тангажа, ДУС в канале
направления маркируется ДУС -Н.
является датчик угловой скорости ДУС-
Т. Буква Т означает принадлежность
ДУС к каналу тангажа, ДУС в канале
направления маркируется ДУС -Н.![]() снимается с потенциометр; R8
ДУС, включённого в мостовую схему. Два
других плеча этой схемы образованы
потенциометром жесткой обратной связи
R9,
щётка которого связана со штоком РАУ.
Средняя точка потенциометра R9
и щётка потенциометра R8
соединены через потенциометр R10
датчика скоростного напора. Напряжение
питания R9
подаётся со щёток потенциометров R6
и R7
блока передаточных отношений. В
зависимости от положения щёток R6
и R7
меняется напряжение на R9,а
следовательно, и коэффициент усиления
по обратной связи. При несимметричной
настройке R6
и R7
эффективность
сигнала жёсткой обратной связи при
перемещении штока РАУ в одну и другую
сторону от среднего положения может
быть установлена неодинаковой.
снимается с потенциометр; R8
ДУС, включённого в мостовую схему. Два
других плеча этой схемы образованы
потенциометром жесткой обратной связи
R9,
щётка которого связана со штоком РАУ.
Средняя точка потенциометра R9
и щётка потенциометра R8
соединены через потенциометр R10
датчика скоростного напора. Напряжение
питания R9
подаётся со щёток потенциометров R6
и R7
блока передаточных отношений. В
зависимости от положения щёток R6
и R7
меняется напряжение на R9,а
следовательно, и коэффициент усиления
по обратной связи. При несимметричной
настройке R6
и R7
эффективность
сигнала жёсткой обратной связи при
перемещении штока РАУ в одну и другую
сторону от среднего положения может
быть установлена неодинаковой.![]()
![]() 1
1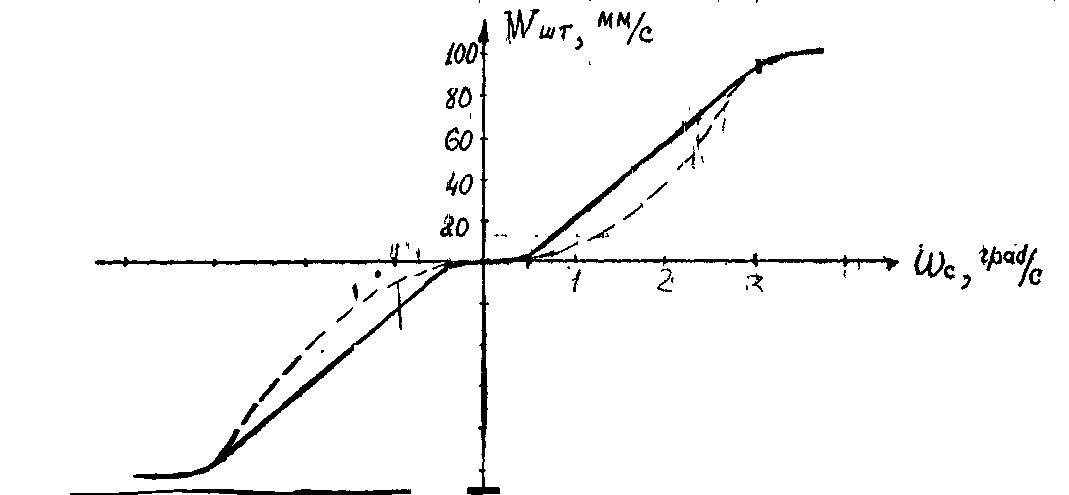
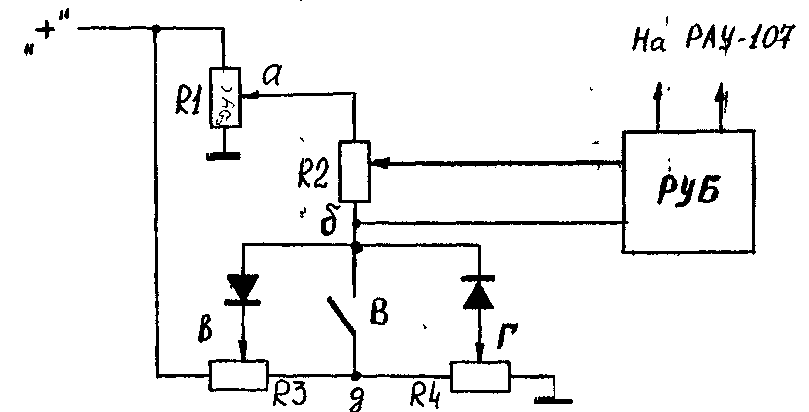
2.6 Автоматы устойчивости ау - 105а и ау - 128,
![]() =0/
R1
потенциалы точек а и b
одинаковы. И ток через R2
не течёт. Когда произойдёт смещение
щётки, «а» в сторону увеличения потенциала
до уровня большего, чем в точке «б» то
через потенциометр БПО R2
потечёт ток от т очки «а» к точке
«в».
=0/
R1
потенциалы точек а и b
одинаковы. И ток через R2
не течёт. Когда произойдёт смещение
щётки, «а» в сторону увеличения потенциала
до уровня большего, чем в точке «б» то
через потенциометр БПО R2
потечёт ток от т очки «а» к точке
«в».2.7. Особенности эксплуатации самолетных демпферов.
3 Место сау в комплексе ао ла.
3.1 Назначение Состав и основные элементы
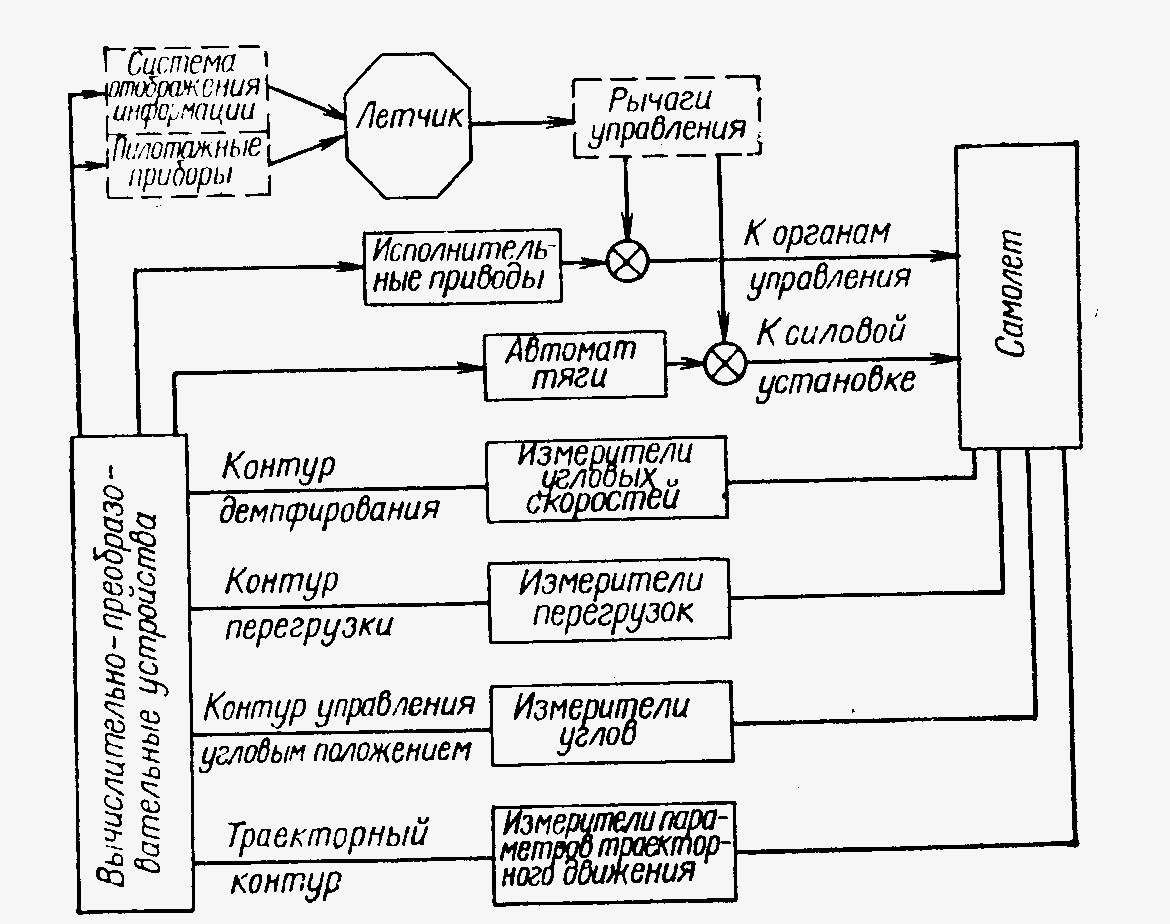
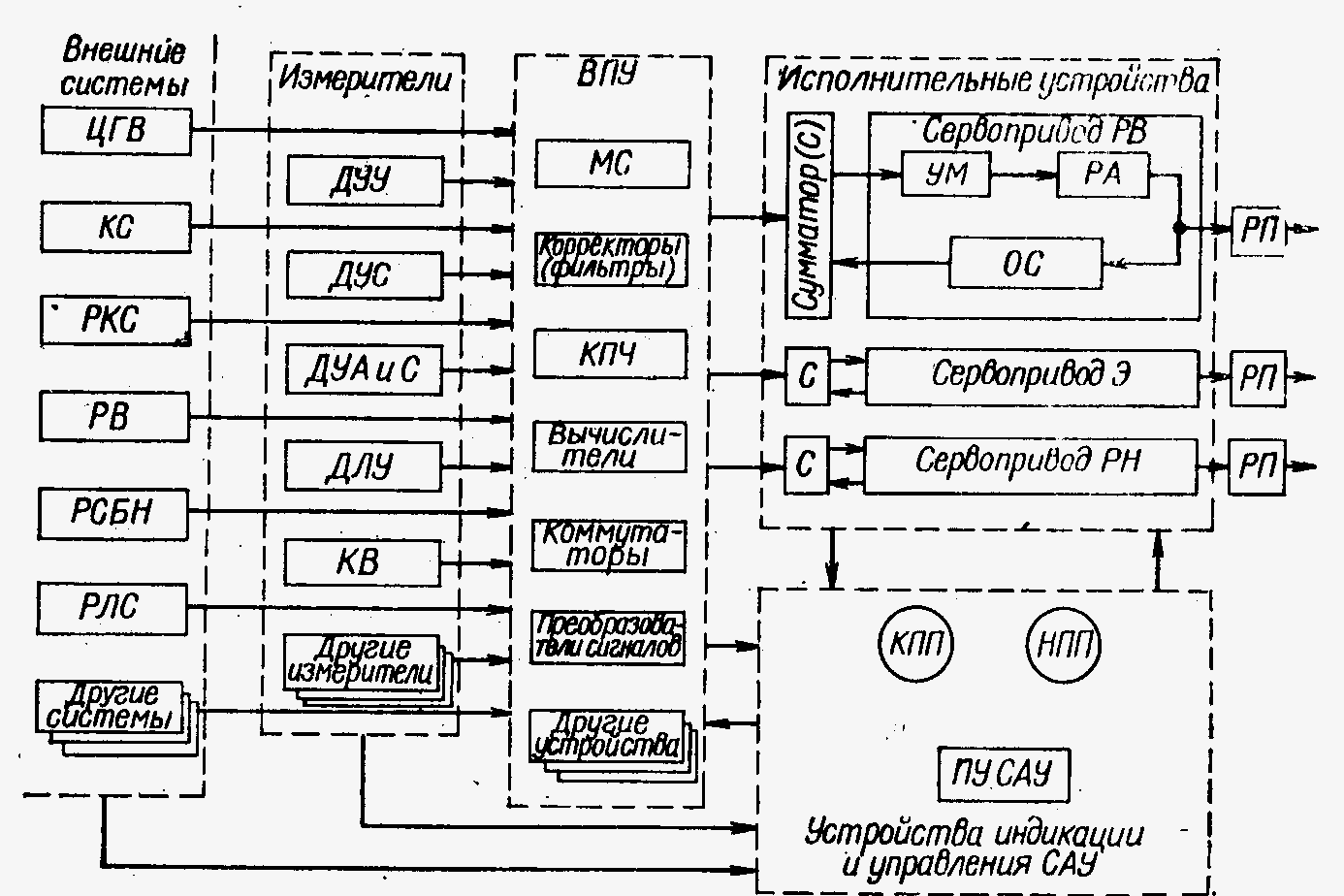
![]()
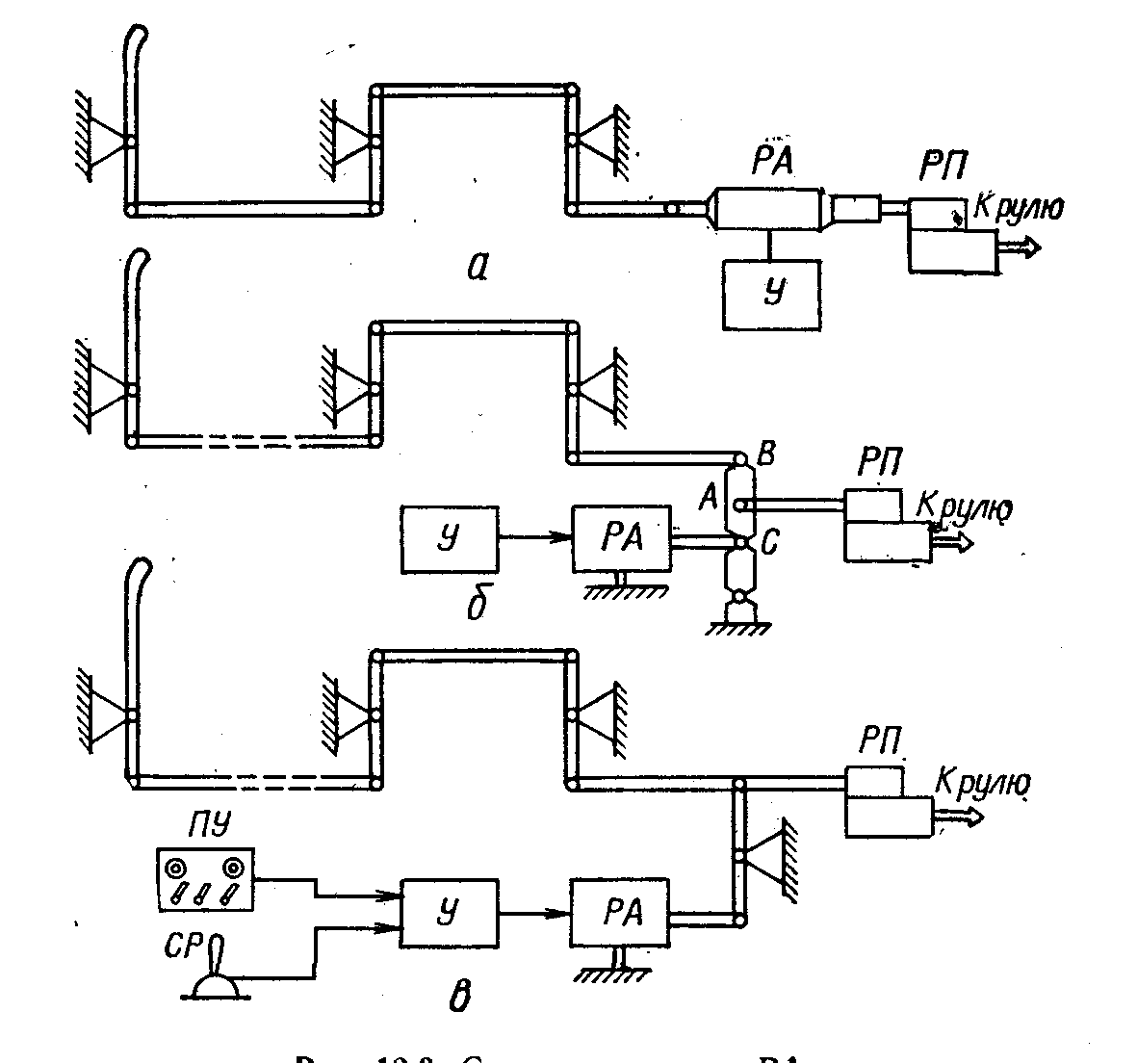
3.2. Режимы работы, законы управления сау при автоматическом управлении

![]() ()
()![]() где ωZ≈
где ωZ≈![]() ()
()![]()
![]() называются передаточными числами
канала руля высоты соответственно по
углу тангажа и угловой скорости тангажа.
называются передаточными числами
канала руля высоты соответственно по
углу тангажа и угловой скорости тангажа.![]() и крена γ. Учитывая, что работу каналов
бокового и продольного управления
можно исследовать раздельно, рассмотрим
функционирование в этом режиме канала
руля высоты САУ.
и крена γ. Учитывая, что работу каналов
бокового и продольного управления
можно исследовать раздельно, рассмотрим
функционирование в этом режиме канала
руля высоты САУ.![]() ()
()![]() .
За счет
этого сигнала создается отклонение
руля высоты, способствующее уменьшению
перегрузки.
.
За счет
этого сигнала создается отклонение
руля высоты, способствующее уменьшению
перегрузки.![]() .
Введение этого сигнала осуществляется
автоматически, когда угол тангажа
самолета станет меньше определенного
значения (порядка десяти градусов).
Значение высоты полёта, на которой
происходит подключение сигнала
.
Введение этого сигнала осуществляется
автоматически, когда угол тангажа
самолета станет меньше определенного
значения (порядка десяти градусов).
Значение высоты полёта, на которой
происходит подключение сигнала![]() ,
вводится в САУ как заданное(Нз).
,
вводится в САУ как заданное(Нз).![]() ()
()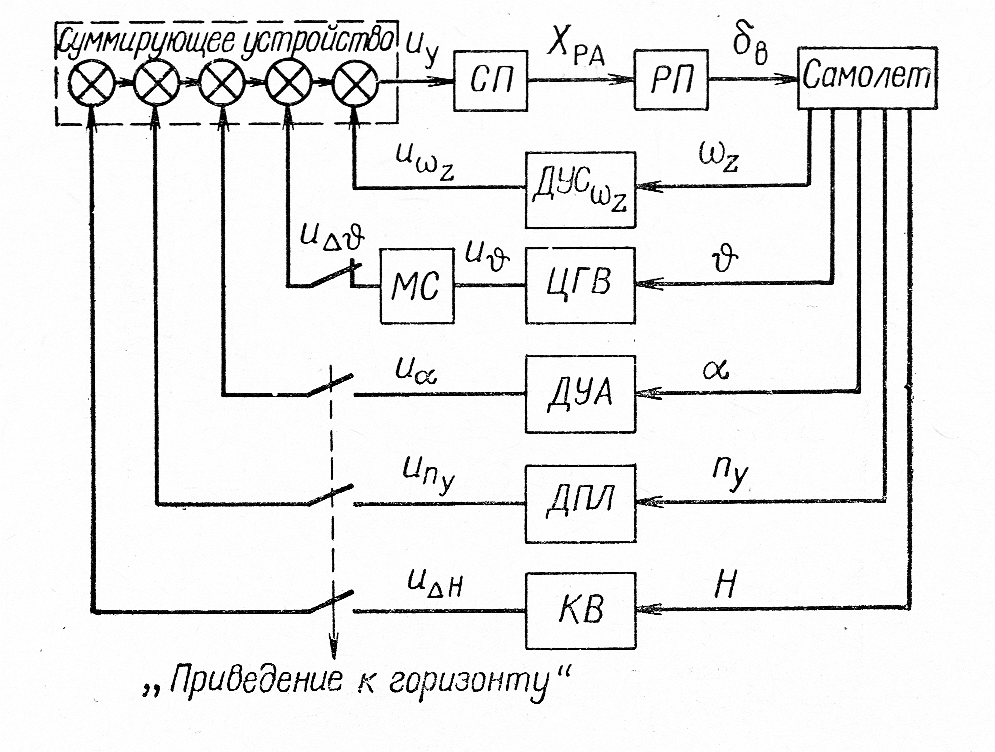
![]() , ()
, ()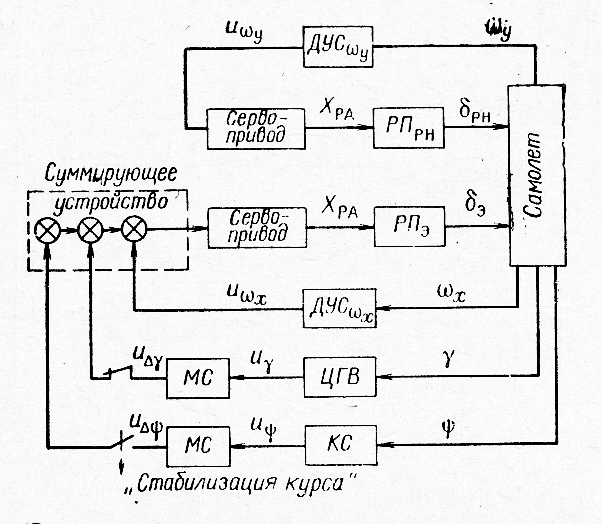
![]() ()
()![]() в законе управления () обеспечивает
устойчивость процесса стабилизации
курса. Такая особенность формирования
законов управления объясняется тем,
что при управлении элеронами крен,
значение которого больше заданного,
считается созданным специально для
значительного изменения курса самолета.
в законе управления () обеспечивает
устойчивость процесса стабилизации
курса. Такая особенность формирования
законов управления объясняется тем,
что при управлении элеронами крен,
значение которого больше заданного,
считается созданным специально для
значительного изменения курса самолета.![]() и ДУС
и ДУС![]() . Контакты на схеме изображены в
положениях, соответствующих стабилизации
угла крена.
. Контакты на схеме изображены в
положениях, соответствующих стабилизации
угла крена.
![]() ,
,3.3. Особенности функционирования сау при директорном управлении
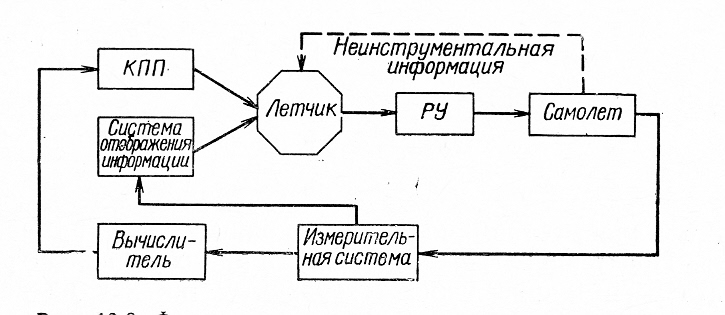
![]()
![]()
![]()
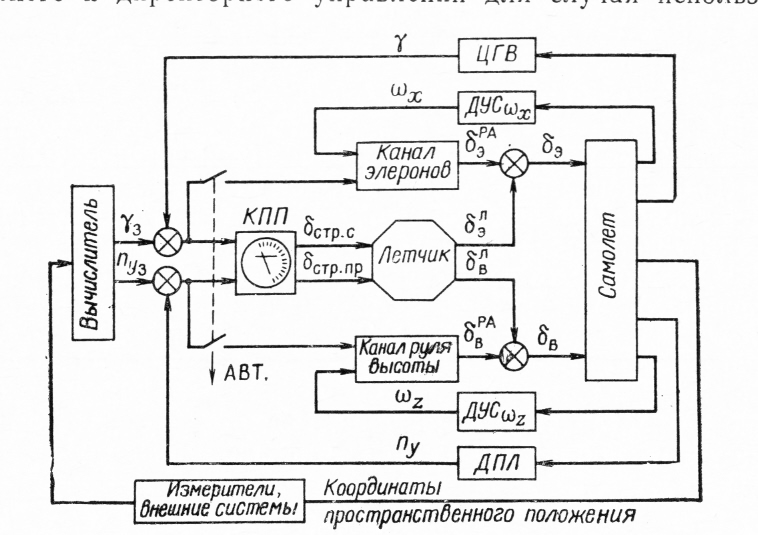
3.4. Особенности эксплуатации и контроля сау
3.5. Пилотажно-навигационные комплексы
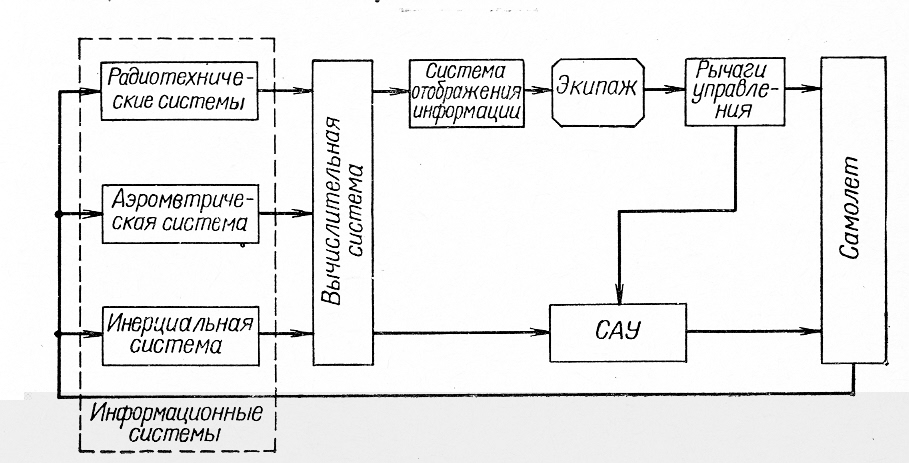
3.6 Основные, общие сведения о сау и пнк.
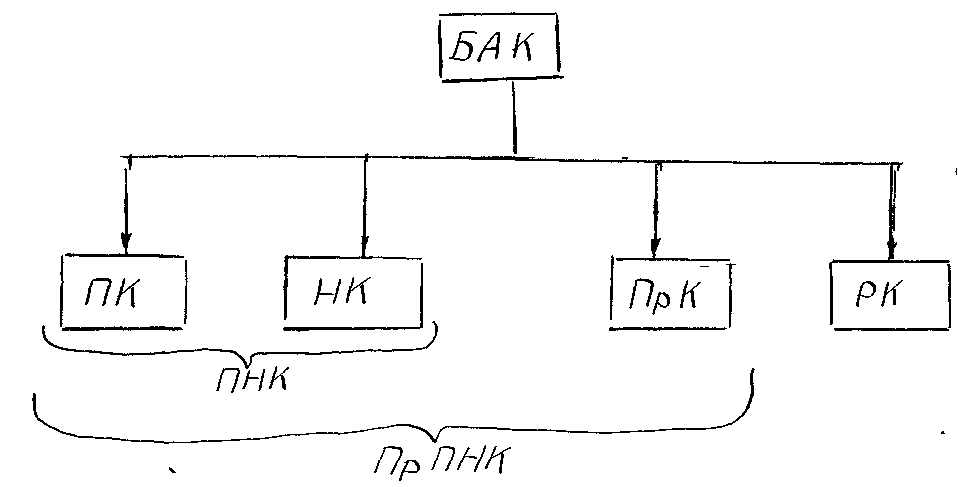
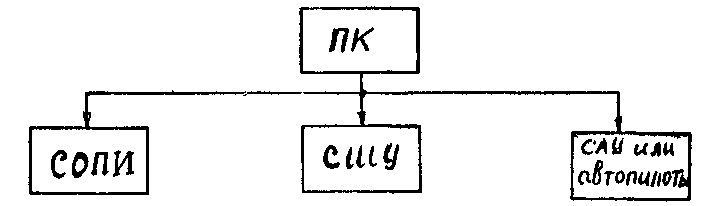
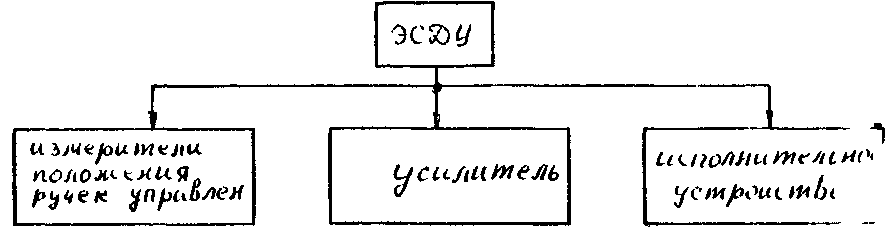
3.7 Классификация сау / по классам авиационных ла/:

3.8 Режимы работы сау можно разделить на несколько групп:
![]()
![]() имеет сложную зависимость от режима
полёта;
имеет сложную зависимость от режима
полёта;3.9 Блок датчиков линейных ускорений бдлу-1- 3
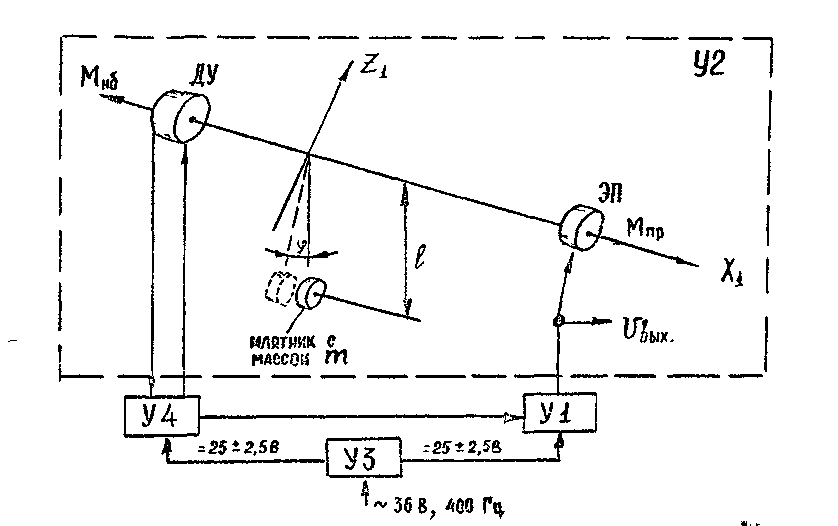
![]()
![]()
![]()
![]()

Основные технические данные:
3.10 Корректор высоты kb - 16 – I
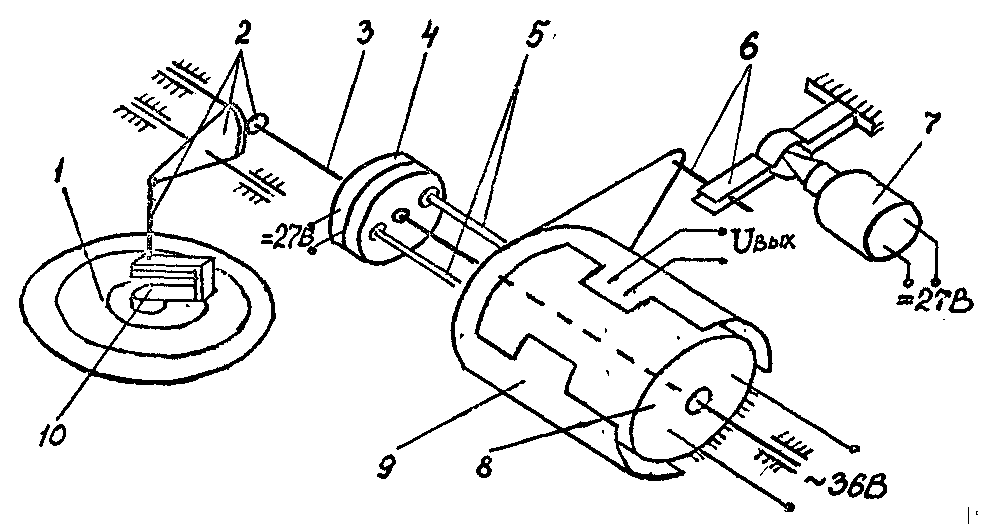
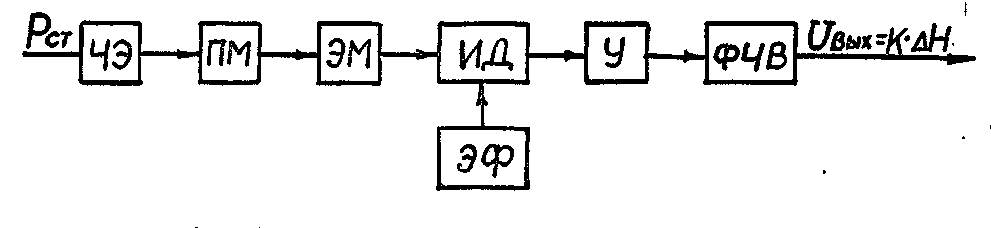
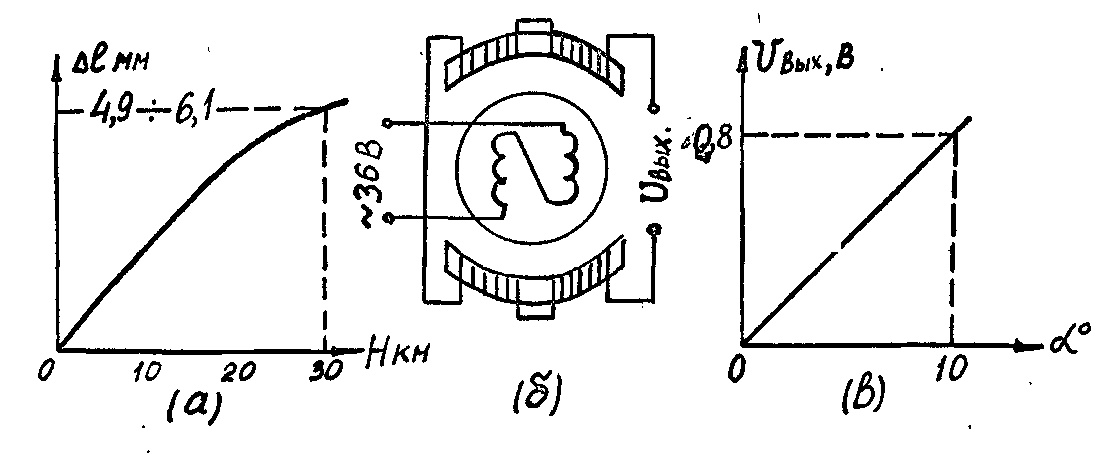
Основные технические данные
3.11 Датчик положения ручки дпр - 23
![]() используется .в креновом канале курса
САУ. В канале крена
используется .в креновом канале курса
САУ. В канале крена![]() компенсирует эффект занижения
установившейся угловой скорости
вращения самолёта по продольной оси
при работе демпфера крена. В канале
курса
компенсирует эффект занижения
установившейся угловой скорости
вращения самолёта по продольной оси
при работе демпфера крена. В канале
курса
![]() реализует перекрёстную связь кренового
и курсового
каналов и
тем самым обеспечивается лучшая
ликвидация
углов скольжения. Установлен датчик
на загрузочном
механизме крена и конструктивно
представляет собой литой корпус, к
которому крепится потенциометр со
средней точкой в подшипниках корпуса
перемещается шток, на котором закреплён
щёткодержатель с контактными щётками.
Потенциометр датчика имеет зону
нечувствительности - 2,65 мм, что достигается
путём закорачивания среднего участка
потенциометра. Благодаря этому
перемещение ручки управления в диапазоне
- 20 мм САУ не воспринимаются. Датчик
сохраняет работоспособность и линейность
характеристики вне зоны нечувствительности
при перемещении штока датчика на - 26 мм
реализует перекрёстную связь кренового
и курсового
каналов и
тем самым обеспечивается лучшая
ликвидация
углов скольжения. Установлен датчик
на загрузочном
механизме крена и конструктивно
представляет собой литой корпус, к
которому крепится потенциометр со
средней точкой в подшипниках корпуса
перемещается шток, на котором закреплён
щёткодержатель с контактными щётками.
Потенциометр датчика имеет зону
нечувствительности - 2,65 мм, что достигается
путём закорачивания среднего участка
потенциометра. Благодаря этому
перемещение ручки управления в диапазоне
- 20 мм САУ не воспринимаются. Датчик
сохраняет работоспособность и линейность
характеристики вне зоны нечувствительности
при перемещении штока датчика на - 26 ммОсновные технические данные:
4 Сау и автопилоты.
4.1 Автопилот ап - 155 - назначение, состав, основные технические данные и функциональная схема

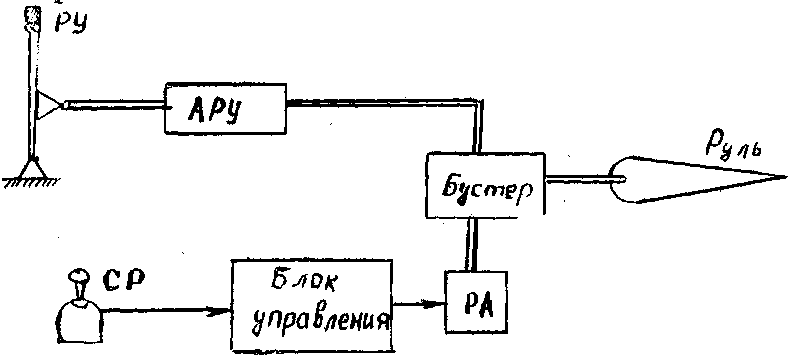
5.Основные сведения о системах автоматического управления.
5.1. Общая характеристика системы управления самолётом
5.2. Требования, предъявляемые к системе управления.
5.3 Классификация систем управления
5.4. Роль лётчика в системе управления самолётом
Преимуществами машины являются:
6 Система прямого управления
6.1. Структурно-функциональная и принципиальная схемы прямого управления
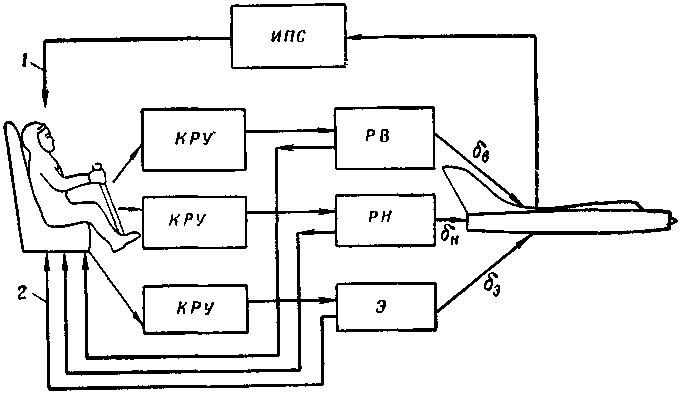
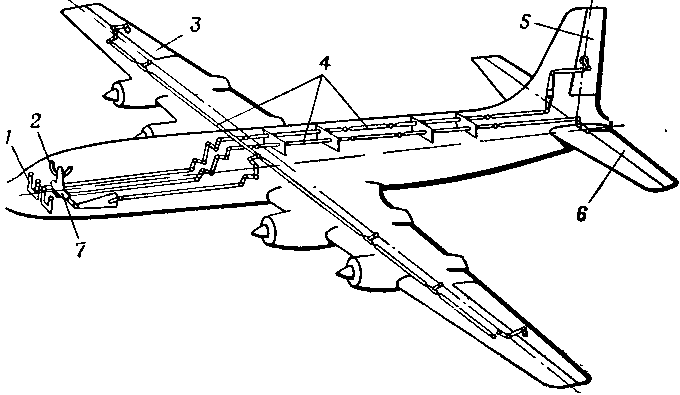
6.2. Усиления на рычагах управления


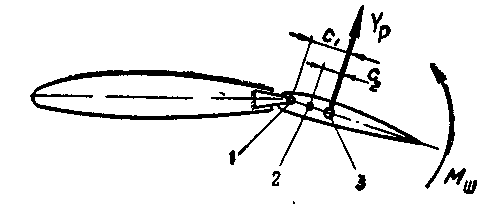
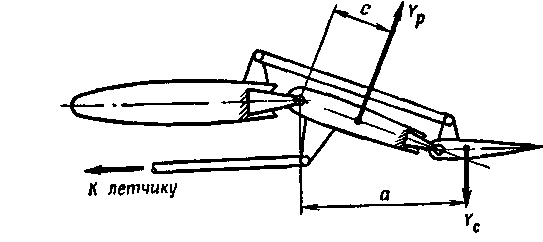
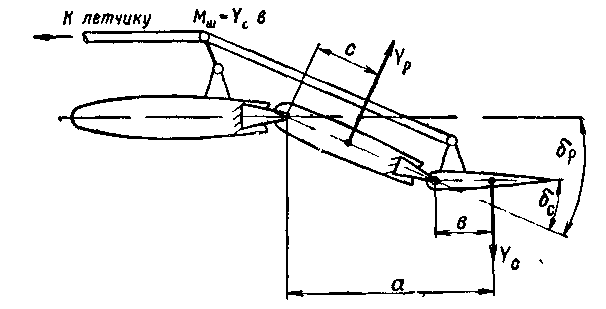
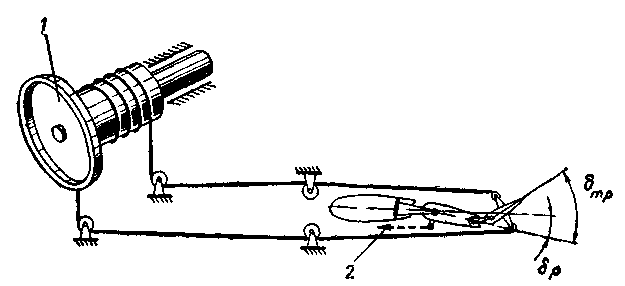
6.3 Агрегаты системы прямого управления.
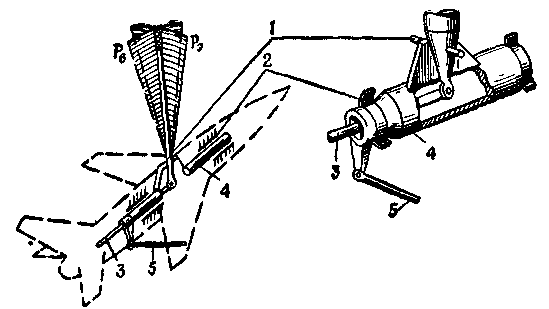

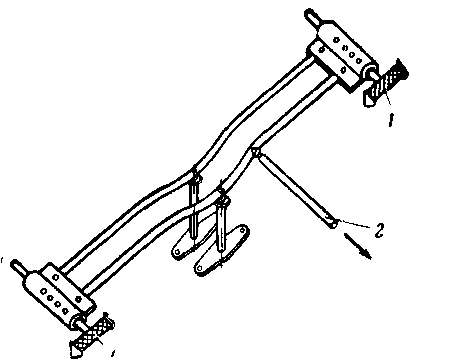
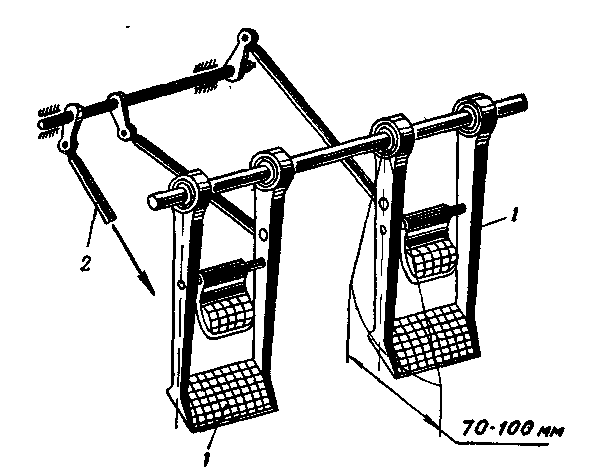
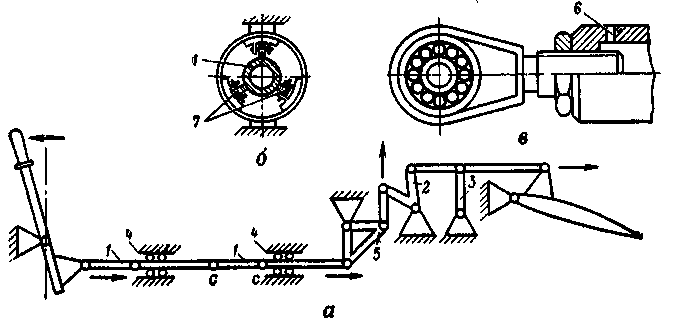
![]() (14.1)
(14.1)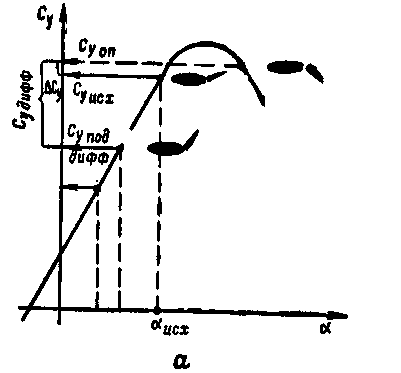
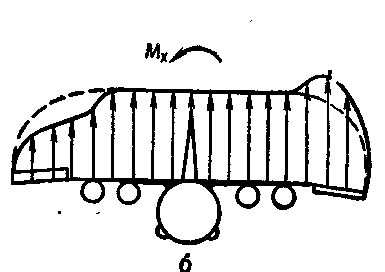
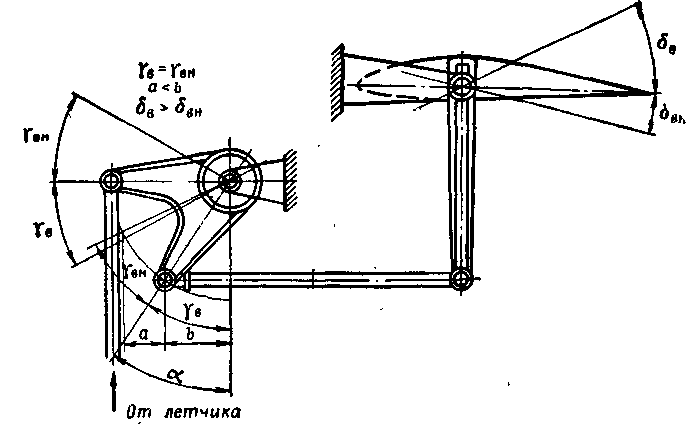
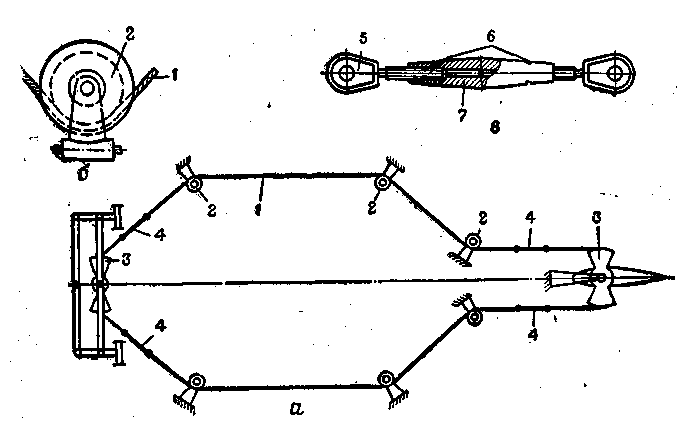
![]()
![]()
![]()
![]() ,
,![]()
![]() м
м
![]() мм и трос может соскочить с роликовых
направляющих. Это требует регулярного
контроля за натяжением тросов, что
обеспечивается с помощью тандеров
(рис. 6.15, 0). Кроме того, в процессе
эксплуатации наблюдается износ и
разрушение отдельных нитей тросов
и роликов.
мм и трос может соскочить с роликовых
направляющих. Это требует регулярного
контроля за натяжением тросов, что
обеспечивается с помощью тандеров
(рис. 6.15, 0). Кроме того, в процессе
эксплуатации наблюдается износ и
разрушение отдельных нитей тросов
и роликов.6.4 Схемы управления элевонами и дифференциальным стабилизатором

7 Системы полуавтоматического и автоматического управления
7.1 Назначение и принципиальная схема системы бустерного полуавтоматического управления самолётом.
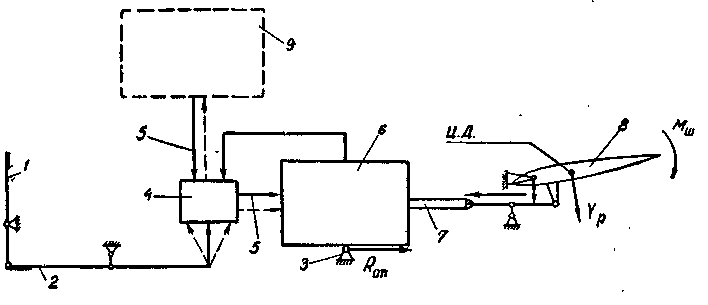
7.2. Гидравлический силовой привод
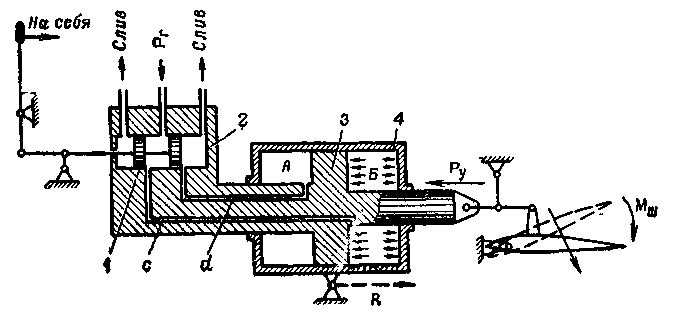
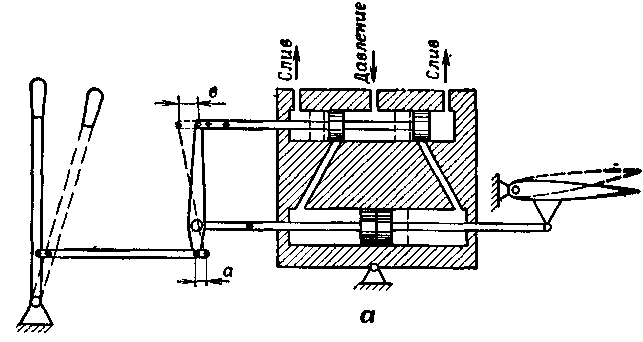
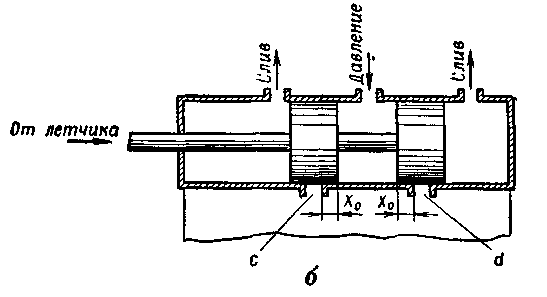

7.3. Агрегаты, формирующие усилия на рычагах управления.
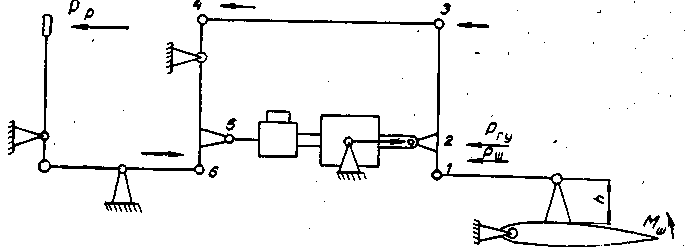
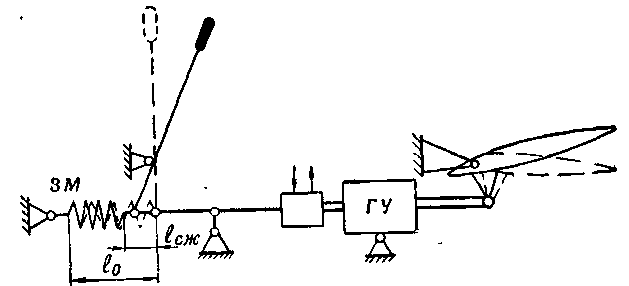
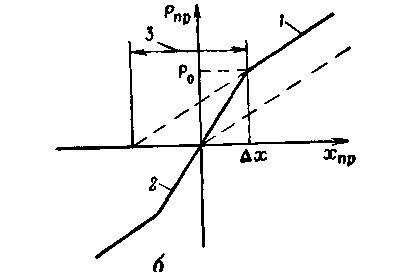
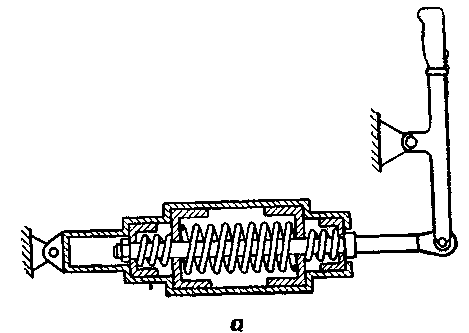
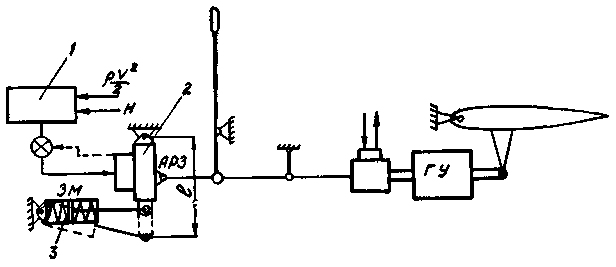
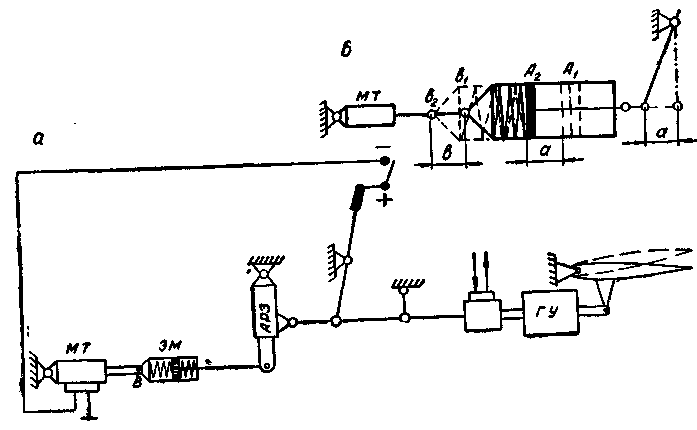
7.4. Устройства, изменяющие передаточное отношение системы управления в полёте
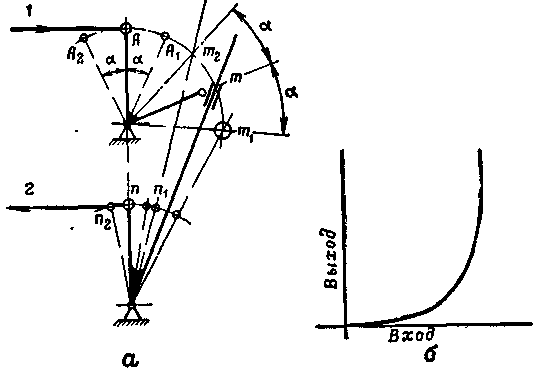
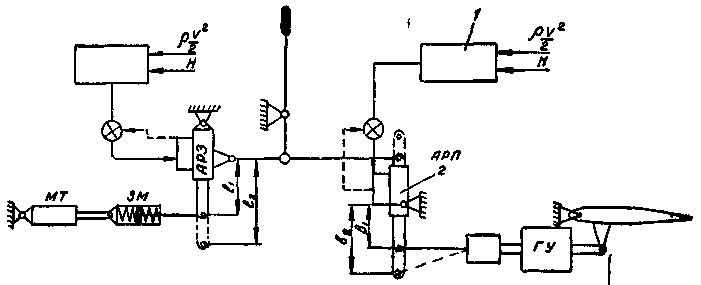
7.5. Автоматические устройства для улучшения динамических характеристик самолёта.
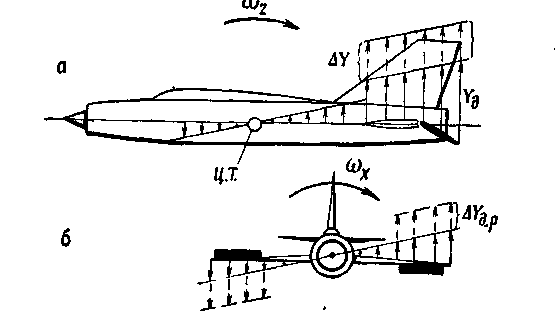
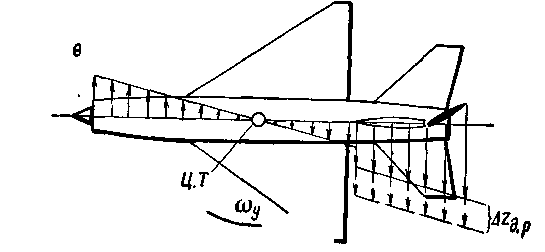
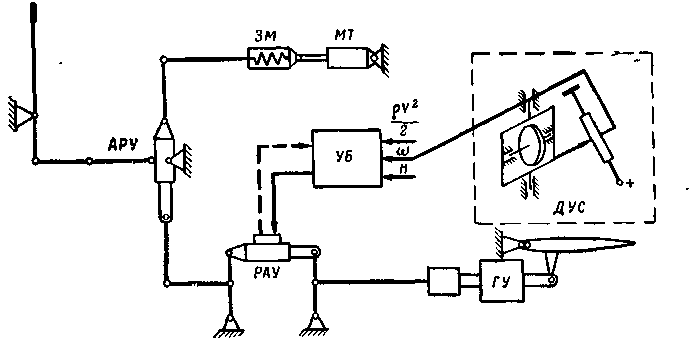

![]() .
.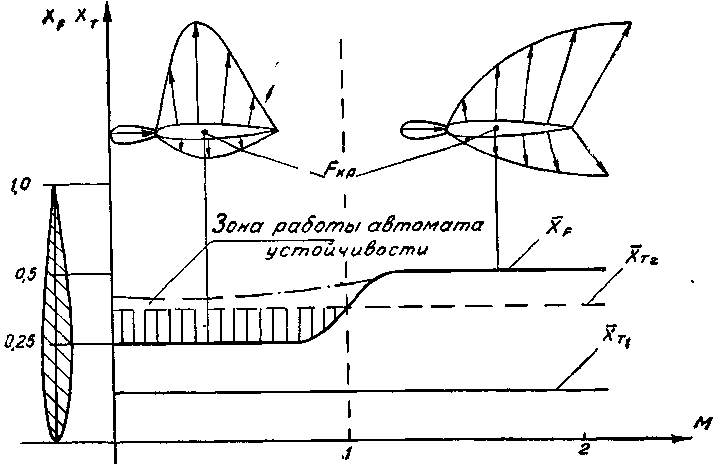
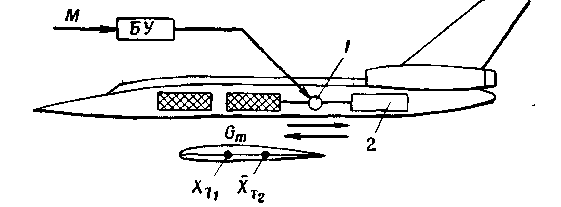
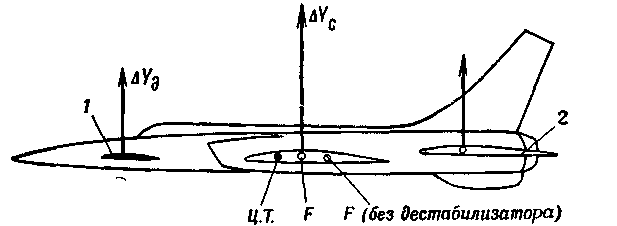
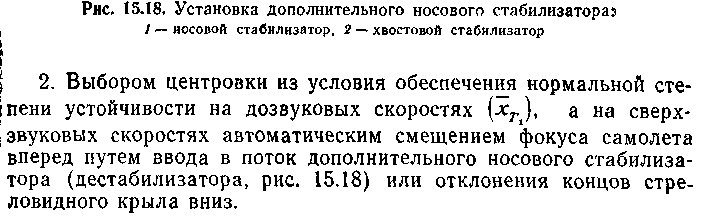
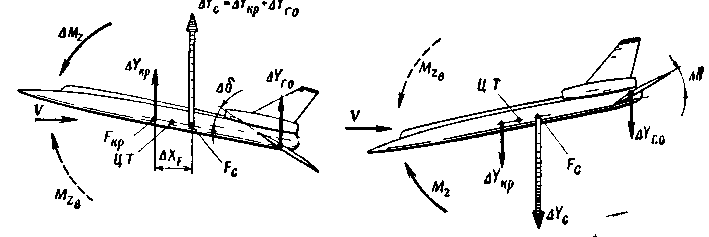
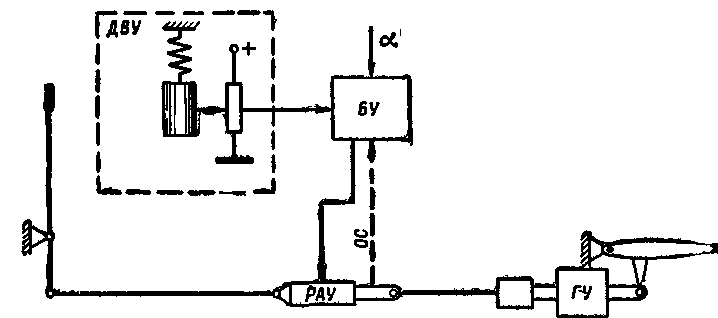
Автомат путевой устойчивости.
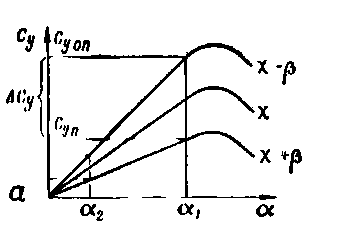
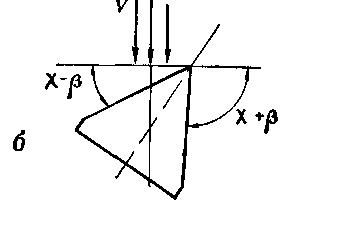


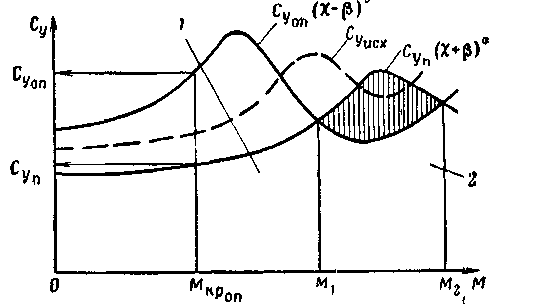
7.6. Комплексные системы автоматического управления
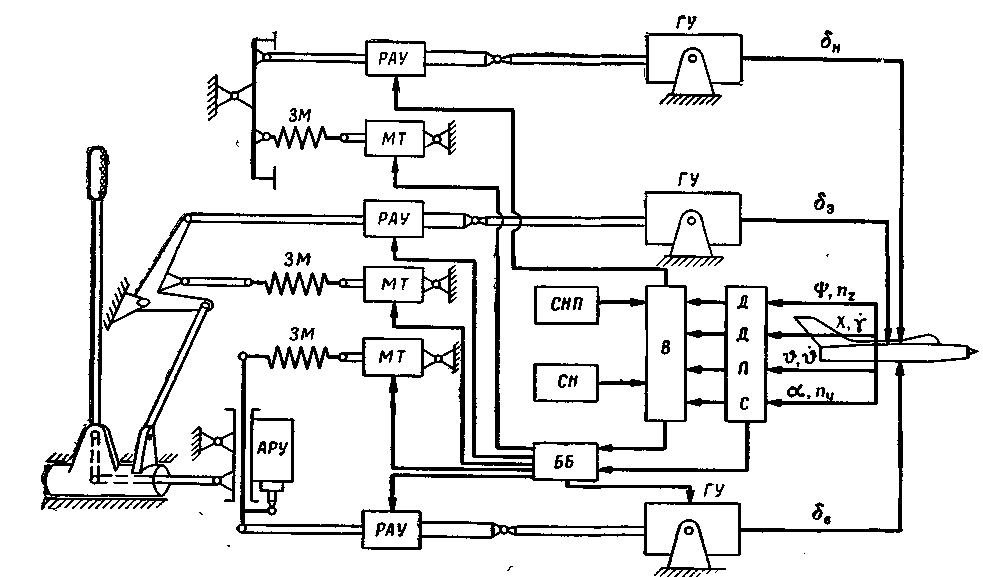
7.7. Возможные неисправности системы прямого управления и механической части системы непрямого управления.
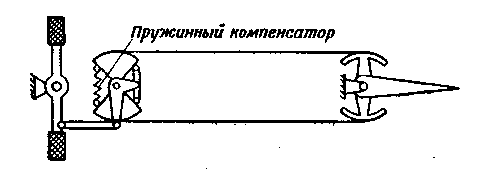
7.8. Пути повышения надёжности полуавтоматических систем управления самолётом.

103
3 102
4 101
5 100
6 99
7 98
8 97
9 96
10 95
11 94
12 93
13 92
14 91
15 90
16 89
17 88
18 87
19 86
20 85
21 84
22 83
23 82
24 81
25 80
26 79
27 78
28 77
29 76
30 75
31 74
32 73
33 72
34 71
35 70
36 69
37 68
38 67
39 66
40 65
41 64
42 63
43 62
44 61
45 60
46 59
47 58
48 57
49 56
50 55
51 54
52 53