

Проектирование мехатронных узлов Божко
.pdfПлотность роботизации по странам на конец 2017 г., количество роботов на 10000 чел., занятых в промышленности
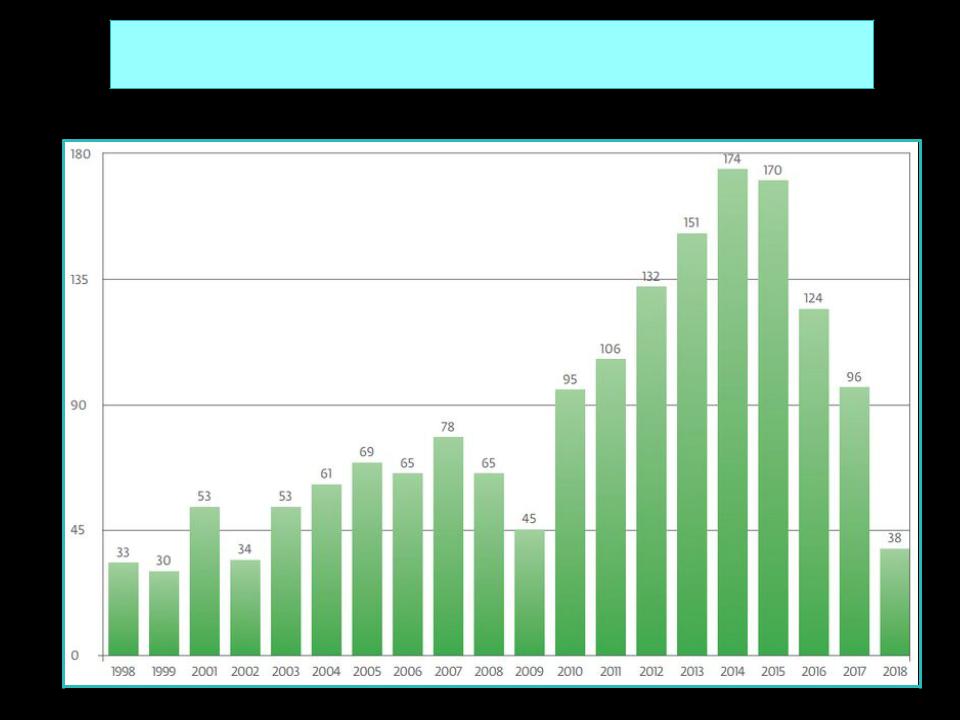
Количество патентов с ключевым словом "робот", выданных на территории РФ
Первые промышленные роботы имели программное управление, в основном заимствованное у станков с числовым программным управлением (ЧПУ). Из станкостроения были взяты и приводы. Эти роботы получили название роботов первого поколения.
Второе поколение роботов — это «очувствленные» роботы,
снабженные сенсорными системами, главными из которых являются системы технического зрения (СТЗ), а также роботы с адаптивным управлением (адаптивные роботы). Первые такие промышленные роботы с развитым очувствлением и микропроцессорным управлением появились и получили практическое применение в 1980–1981 гг. на сборке, сварке, операциях, связанных с взятием неориентированных предметов, — например, с конвейера.
На рубеже XXI века робототехника подошла к следующему этапу своего развития — созданию роботов третьего поколения
(интеллектуальных роботов). Это стало естественным этапом совершенствования адаптивных роботов. Интеллектуальный робот — это робот, в основных системах которого и, прежде всего, в управлении используются методы искусственного интеллекта.
Перспективой дальнейшего развития способов управления роботами, в направлении которых ведутся научные исследования, станет техническая реализация — наряду с интеллектом — также и творческих, креативных, способностей человека. Это будут роботы следующего, четвертого поколения — роботы с искусственным разумом (интеллект плюс креативность), т. е. разумные роботы.
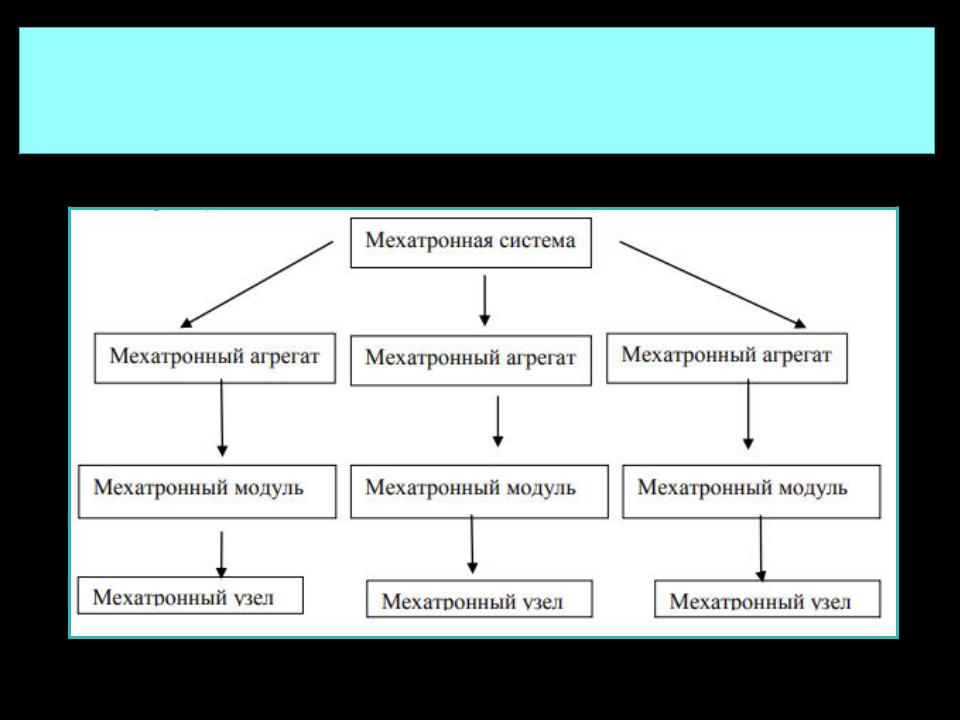
Для мехатронных объектов характерно иерархическое построение. Все мехатронные объекты можно разделить на следующие группы:
мехатронные узлы, мехатронные модули, мехатронные агрегаты, мехатронные системы.
Мехатронный узел – это неунифицированная сборочная единица, содержащая некоторые компоненты мехатронного объекта (например, шариковинтовая передача с датчиками положения и усилия).
Мехатронный модуль – основная единица мехатронной системы, унифицированный мехатронный объект, служащий для реализации одной из функций мехатронной системы (например, мехатронный модуль подачи инструмента, моторшпиндель). (По определению модуль
– это унифицированная функциональная часть машины, конструктивно оформленная как самостоятельное изделие.) Мехатронные модули как унифицированные объекты имеют нормализованный ряд типоразмеров, характеризуемый определенными мощностями, габаритами, типом движения (например, поступательного или вращательного), классом точности и т. д.
Мехатронный агрегат – это совокупность мехатронных модулей, предназначенная для выполнения группы однотипных функций (например, многокоординатная измерительная машина, а также многокоординатный столик микроскопа, если он состоит из модулей).
Мехатронная система – целевое упорядоченное множество взаимосвязанных мехатронных агрегатов, функционирующих во времени и взаимодействующих с внешней средой.
Основы разработки приводов мехатронных систем
Презентация 2
Приводы мехатронных систем. Преобразователи движения.
Классификация мехатронных модулей
По физической природе составляющих элементов ММ подразделяются на электроприводные, гидроприводные, пневмоприводные и прочие.
В состав электроприводных ММ входят электродвигатель и (как правило) преобразователь движения. Они распространены наиболее широко и обычно являются базой для сравнения вариантов на стадии проектирования.
Гидроприводные ММ содержат гидродвигатели линейного или вращательного движения. По сравнению с электроприводными они обладают значительно меньшими размерами и массой, в частности, потому, что не требуют преобразователя движения; малой инерционностью; простотой регулирования и его широким диапазоном. К недостаткам их следует отнести сравнительно высокую стоимость; необходимость в насосной установке; чувствительность к качеству рабочей жидкости.
Пневмоприводные ММ по принципу действия подобны гидроприводным, а различия между ними определяются особенностями рабочей среды — сжатого воздуха. ММ с пневмоприводом конструктивно проще гидроприводных, дешевле, менее требовательны в эксплуатации, способны реализовать более высокие скорости движения. В то же время их нагрузочная способность при равных размерах на два порядка меньше, существенно ниже КПД, они не в состоянии обеспечивать точные перемещения.
Понятие привода мехатронной системы. Состав привода. Электрические приводы.
Приводы - это «мышцы» мехатронной системы, которые принимают команды управления (в основном в виде электрического сигнала) и производят изменение в физической системе, генерируя перемещения и усилия на рабочем органе.
Приводом называют энергосиловое устройство, приводящее в движение машину. Привод состоит из источника энергии (силовой установки), передаточного устройства (трансмиссии) и системы управления для приведения в действие механизмов машины, а также для их отключения.
Требования к приводам мехатронных систем
К приводам, применяемым в МС, предъявляют весьма жесткие специфические требования. В связи с необходимостью встраивания приводов в рабочие органы МС — в манипуляторы и системы передвижения — габариты и масса приводов должны быть минимальными. Приводы в МС работают в основном в неустановившихся режимах и с переменной нагрузкой. При этом переходные процессы в них должны быть практически неколебательными. Важными параметрами приводов МС являются также надежность, стоимость, удобство эксплуатации.