

Mechanics-13
.pdfМинистерство образования и науки Российской Федерации Ярославский государственный университет
им. П. Г. Демидова
В.П. Алексеев, Е. О. Неменко,
В.А. Папорков, Е. В. Рыбникова
Лабораторная работа № 13
Определение момента инерции тела, скатывающегося по наклонной плоскости.
Ярославль 2013

Лабораторная работа № 13.
Определение момента инерции тела, скатывающегося по наклонной плоскости1
Цель работы:
Определить момент инерции тел, скатывающихся без скольжения по наклонной плоскости, относительно мгновенной оси вращения расчётным и экспериментальным методом
Оборудование:
•лабораторная установка;
•тело с постоянным моментом инерции (“диск”);
•тело с переменным моментом инерции (“крестовина”);
•электронный блок “секундомер”;
•Штангенциркуль.
13.1. Краткая теория
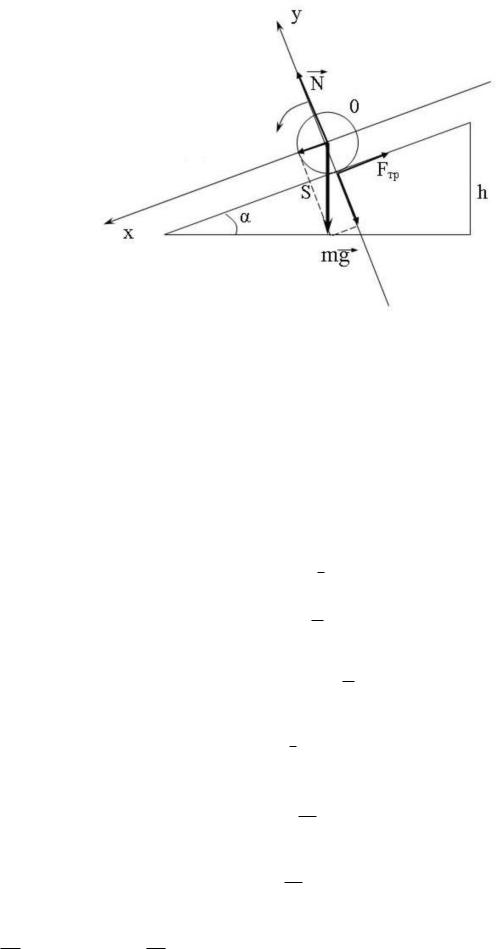
Рассмотрим тело радиуса r, скатывающееся по наклонной плоскости без проскальзывания. Такое
тело участвует одновременно в двух движениях:
1)вращается относительно оси, проходящей через его центр масс,
2)движется поступательно вниз вдоль наклонной плоскости.
На такое тело действуют следующие силы: сила тяжести , сила реакции опоры ~ и сила тре- m~g N
~ |
|
ния Fтр (рис. 13.1). Поступательное движение тела описывается вторым законом Ньютона. Запишем |
|
его в векторной форме: |
|
~ ~ |
(13.1) |
m~a = m~g + N + Fтр. |
|
Ось OX выберем параллельной наклонной плоскости, ось OY перпендикулярной ей (рис. 13.1). Разложим вектор силы тяжести m~g по проекциям на выбранные оси.
Проекция на ось OX будет выглядеть так:
ma = mg sin α + Fтр. |
(13.2) |
Плечо силы трения, относительно оси вращения, проходящей через центр масс тела, равно r.
(У всех других сил, действующих на катящееся тело, плечо относительно данной оси равно нулю.) Следовательно, момент силы трения равен
Mтр = Fтрr. |
(13.3) |
1Ранее данная работа имела номер 14.
1
13.1. Краткая теория |
2 |
|
|
Рис. 13.1. Силы, действующие на скатывающееся тело
Вращение тела описывается основным законом динамики вращательного движения (вторым законом Ньютона для вращательного движения):
~ |
|
|
|
(13.4) |
M = J~ε, |
|
|||
где J - момент инерции тела, ε - угловое ускорение. |
|
|
|
|
Так как тело скатывается без скольжения, то |
|
|
|
|
ε = |
a |
, |
|
(13.5) |
r |
|
|||
|
|
|
|
|
Запишем уравнение (13.4), подставив в него (13.3) |
и (13.5): |
|
||
a Fтрr = J r .
откуда
a Fтр = J r2 .
Подставим уравнение (13.6) в выражение (13.2), получим:
a ma = mg sin α − J r2 .
Откуда выразим момент инерции тела:
J = mr2 ag sin α − 1 .
(13.6)
(13.7)
(13.8)
Поскольку поступательное движение тела по наклонной плоскости является равноускоренным,
то
S = |
at2 |
(13.9) |
2 . |
Преобразуем выражение (13.8), подставив в него (13.9):
J = mr2 2S sin α − 1 . (13.10)
К аналогичному результату можно прийти, рассматривая превращение потенциальной энергии тела относительно основания наклонной плоскости (mgr) в кинетическую энергию поступательного (mv2 2 ) и вращательного (Jω2 2 ) движений.

13.1. Краткая теория |
3 |
|
|
В замкнутой системе тел, в которой действуют только консервативные силы, механическая энергия системы со временем остается постоянной.
W = Wк + Wп = const . |
(13.11) |
Консервативными называются силы, работа которых при перемещении тела не зависит от траектории, а определяется только начальным и конечным положением тела. Работа таких сил по любому замкнутому пути равна нулю. Консервативными являются сила тяжести (всемирного тяготения), кулоновские силы и силы упругости. Если же работа, совершаемая силой, зависит от формы траектории, то такие силы называются диссипативными. К примеру, таковой является сила трения.
Потенциальная энергия тела на верхнем конце наклонной плоскости равна:
Wп = mgh = mgl sin α. |
(13.12) |
Кинетическая энергия на нижнем конце наклонной плоскости складывается из кинетических энергий поступательного и вращательного движений:
Wк = |
mv2 |
+ |
Jω2 |
(13.13) |
|
|
|
, |
|||
2 |
2 |
||||
где v – скорость поступательного движения центра масс тела.
При отсутствии скольжения скорость v центра масс связана с угловой скоростью ω вращения тела соотношением v = rω.
Однако, если мы будем рассматривать движение тела относительно мгновенной оси вращения, положение которой непрерывно изменяется (в нашем случае эта мгновенная ось проходит через точку касания наклонной плоскости с движущимся телом), то такое движение будет только вращательным.
Рассмотрим движение тела, в системе из двух симметричных наклонных плоскостей с углом наклона α 1, с одной из которых тело скатывается вниз, а пройдя нижнюю точку, по инерции
закатывается на другую.
При скатывании тело, опускаясь с высоты h0 = l0 sin α1 ≈ l0α1, проходит путь l0, (рис. 13.2) а поднимаясь по инерции на высоту h ≈ lα2, проходит путь l. В нижней точке скорость поступатель-
ного движения центра масс
v = 2tl0 ,
а угловая скорость тела
ω = |
v |
= |
2l0 |
, |
(13.14) |
|
r |
rt |
|||||
|
|
|
|
где t – время движения от верхней точки до нижней, r – радиус качения (оси).
На скатывающееся тело действует момент сил сопротивления Мтр. Работа его на пути l0 равна
А = −Мтрϕ, где
ϕ0 = lr0 .
Приращение энергии на отрезке пути l0 имеет вид
W = |
Jω2 |
(13.15) |
2 − mgh0 |
где J – момент инерции скатывающегося тела относительно мгновенной оси вращения, m – масса
тела.
При движении тела вниз с высоты h0 и вкатывании его на высоту h работа сил сопротивления на пути l + l0 равна приращению его энергии:
−Mтр |
l0 + l |
= mgh − mgh0 = mgl0α2 − mglα1. |
(13.16) |
||||||
|
|||||||||
|
r |
|
|
|
|
|
|||
Откуда |
|
|
|
|
|
||||
|
Mтр = |
r(mgl0α1 − mglα2) |
. |
(13.17) |
|||||
|
|
|
|
||||||
|
|
|
|
|
l0 + l |
|
|||
Преобразуя формулу (13.15) и подставив в неё (13.14), получим |
|
||||||||
|
|
|
2l02 |
= mgl0α1 + Mтр |
l0 |
(13.18) |
|||
|
J |
|
|
|
. |
||||
|
r2t2 |
r |
|||||||

13.2. Выполнение измерений |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|||
Подставим в (13.18) выражение (13.16) |
|
|
|
|
|
|
|
|||
J |
2l02 |
= mgl0 |
α1 |
+ |
(mgl0α1 − mglα2)l0 |
= |
||||
r2t2 |
l0 + l |
|||||||||
|
|
|
|
|
(13.19) |
|||||
|
|
|
|
mgl0l(α1 + α2) |
|
|
||||
|
|
= |
|
. |
|
|
||||
|
|
|
|
|||||||
|
|
|
|
|
l0 + l |
|
||||
Откуда выразим J: |
|
|
|
|
|
|
|
|
|
|
|
|
J = |
mglr2t2(α1 + α2) |
(13.20) |
||||||
|
|
|
|
|
. |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
2l0(l0 + l) |
|
||||
Здесь величина α1 + α2 является константой для данной установки.
Момент инерции тела относительно мгновенной оси вращения определяется теоремой Штейнера
J = J0 + mr2, |
(13.21) |
где J0 – момент инерции, относительно центра масс; r – расстояние от центра масс тела до оси
вращения.
13.1.1. Описание экспериментальной установки
В работе используются тела, осью которых является цилиндрический стержень радиуса r. Одно из тел 1 (рис. 13.2) помещают на параллельные направляющие 2, образующие с горизонтом углы
α1 и α2.
Рис. 13.2. Схема установки
Если тело отпустить, то оно, скатываясь, достигнет нижней точки и, двигаясь далее по инерции, поднимется вверх по направляющим. Если рассматривать движение тела относительно мгновенной оси вращения, то такая ось проходит через точки касания направляющих с движущимся стержнем.
Параметры установки |
|
|
α1 + α2 |
– |
0.25 рад. |
Масса диска |
– |
500 г |
Масса пластины |
– |
368 г |
Масса оси |
– |
112 г |
Масса крестовины |
– |
495 г |
Погрешность определения длины пути |
– |
±1 мм |
Погрешность измерения времени не более |
– |
±0.1 сек |
13.2. Выполнение измерений
1)Включить клавишу ¾Сеть¿ на задней панели ¾Секундомера¿ (клавиша должна засветится).
2)Выставить маховик на раме с помощью ограничителей и нажать кнопку включения электромагнитного тормоза.
13.3. Порядок выполнения работы |
5 |
|
|
3)Нажать кнопку Пуск на табло ¾Секундомера¿. ¾Секундомер¿ фиксирует время движения маховика до нижней точки.
4)Измерить по линейке (наклеена на направляющих) путь маховика до его остановки.
13.3. Порядок выполнения работы
13.3.1. Аналитический расчёт момента инерции тела
Для расчёта момента инерции, маховика J необходимо знать массу тела, (написана на телах)
или объём (массу рассчитать, используя плотность) и размеры тел. Момент инерции тела будет равен сумме моментов инерции всех его составляющих – диска, пластины и оси:
Jмаховика = Jдиска + Jпластины + Jоси.
Формулы для расчёта моментов инерции различных тел приведены в таблице Б.1 приложения
Б.
13.3.2. Определение момента инерции тела динамическим методом
1)Проверьте правильность положения установки. При скатывании тело не должно смещаться к одной из направляющих. Для регулировки используйте винты основания.
2)Определите массу m тела, запишите ее значение.
3)Измерьте штангенциркулем диаметр d стержня в различных местах, определите его среднее значение и средний радиус r.
4)Установите тело на направляющие на расстоянии l0 от нижней точки (прижав к ограничи-
тельным стержням), и зафиксируйте его положение магнитным тормозом по нажатию кнопки красной кнопки.
5)Нажмите кнопку секундомера Пуск. При этом тормоз отключится, и тело начинает двигаться. Когда тело достигнет нижней точки, секундомер автоматически остановится, отобразив время t.
6)Наблюдая далее за движением тела по инерции, отметьте расстояние l, на которое оно подни-
мется до остановки.
7)Опыт повторите не менее пяти раз. Найдите средние значения величин r, t, l и по формуле (13.20) рассчитайте момент инерции тела J относительно мгновенной оси вращения.
13.3.3.Изучение зависимости момента инерции от распределения массы относительно оси вращения
В этом задании используется тело в виде крестовины, по которой могут перемещаться грузы (цилиндры).
1)Определите массу m тела и радиус r оси тела, и запишите постоянную установки α1 + α2.
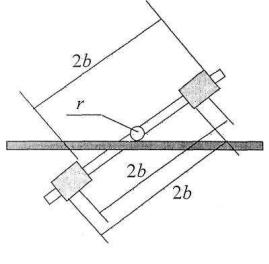
2)Установите подвижные цилиндры на равном расстоянии b от оси вращения и измерьте это
расстояние.
Примечания:
а) Когда грузы находятся на одинаковом расстоянии от оси вращения, тело должно находиться в безразличном положении равновесия на горизонтальных направляющих. Используйте контейнер для балансировки, чтобы добиться безразличного равновесия. Рекомендуется зажимные винты грузов ориентировать в противоположные стороны.
б) Так как цилиндры имеют одинаковый размер, расстояние между центрами грузов равно расстоянию между их торцами, которое можно измерить значительно точнее (рис. 13.3).
3)Установите тело на направляющие на расстоянии l0 от нижней точки (прижав к ограничи-
тельным стержням), и зафиксируйте его положение магнитным тормозом по нажатию кнопки красной кнопки.
13.4. Контрольные вопросы |
6 |
|
|
Рис. 13.3. Измерение расстояния между грузами
4)Нажмите кнопку секундомера Пуск. При этом тормоз отключится, и тело начинает двигаться. Когда тело достигнет нижней точки, секундомер автоматически выключится.
5)Отметьте расстояние l, на которое оно поднимется по инерции.
6)Опыт повторите не менее пяти раз. Найдите средние значения величин r, t, l и по формуле (13.20) рассчитайте момент инерции тела J относительно мгновенной оси вращения.
7)Повторите измерения при трёх-четырёх других расстояниях b цилиндров, относительно оси
вращения.
8)Постройте график зависимости J = J(b2) и по графику определите момент инерции крестовины Jкр и массу m подвижных грузов.
13.4. Контрольные вопросы
1)Укажите величины кинетической и потенциальной энергии при скатывании тела: в начале и в конце движения, в нижней точке и в произвольной точке.
2)Опишите характер движения тела по направляющим. Какие силы создают момент относительно оси вращения, мгновенной оси вращения?
3)Как измеряют угловую скорость ω в данной работе?
4)Какие величины измеряют для определения скорости ω, момента сил трения, работы сил
трения?
5)Какие уравнения лежат в основе динамических методов определения момента инерции?
6)Что составляет основу методики расчётного метода определения величины J?
7)Укажите возможные источники случайных и систематических погрешностей при измерениях.
8)Сформулируйте закон изменения, сохранения полной механической энергии тела, системы тел.

Приложение А.
Правила пользования электронным блоком “Секундомер” ЮУрГУ
Электронный блок “Секундомер” предназначен для управления различными лабораторными установками и измерения времени протекающих процессов. Также он может измерять интервалы времени в “ручном” режиме.
На передней панели счётчика расположены кнопки “Пуск” 1 и “Стоп” 2, а также цифровое табло, отображающее прошедшее время 3. Запуск секундомера происходит после нажатия кнопки “Пуск”,
при этом освобождается тормоз установки, если блок подключён к ней. Остановка отсчёта происходит при срабатывании соответствующего датчика установки, либо при нажатии кнопки “Стоп”.
Выключатель сети расположен на задней панели блока, в верхнем правом углу. Также на задней панели расположены разъёмы для управления электромагнитным тормозом и для ввода сигнала от датчика остановки.
Рис. А.1. Электронный блок “Секундомер” ЮУрГУ
7

Приложение Б.
Справочные материалы и таблицы
Таблица Б.1. Моменты инерции тел правильной геометрической формы
|
№ п.п. |
Тело |
Положение оси |
Формула |
||||
|
|
|
|
|
|
|
|
|
|
1 |
Полый тонкостенный |
Ось |
|
|
|
|
|
|
|
цилиндр или кольцо, |
цилиндра |
|
mr2 |
|||
|
|
радиус r, |
|
|
|
|
|
|
|
|
масса m |
|
|
|
|
|
|
|
2 |
Сплошной цилиндр |
Ось |
|
|
|
|
|
|
|
или диск |
цилиндра |
|
21 mr2 |
|||
|
|
радиус r, |
|
|
|
|
|
|
|
|
масса m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
Полый толстостенный |
Ось |
|
|
|
|
|
|
|
цилиндр |
цилиндра |
m |
R2 |
− m |
r2 |
|
|
|
2 |
2 |
|||||
|
|
внешний радиус R, |
|
|
|
|
|
|
|
|
внутренний радиус r, |
|
|
|
|
|
|
|
|
масса m |
|
|
|
|
|
|
|
4 |
Сплошной цилиндр |
Перпендикулярна |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
||
|
|
радиус r, |
цилиндру |
mr4 |
+ ml12 |
|||
|
|
длина l, |
и проходит через |
|
|
|
|
|
|
|
масса m |
его центр масс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
Полый тонкостенный цилиндр |
Перпендикулярна |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
||
|
|
радиус r, |
цилиндру |
mr2 |
+ ml12 |
|||
|
|
длина l, |
и проходит через |
|
|
|
|
|
|
|
масса m |
его центр масс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8

9
Таблица Б.2. Моменты инерции тел правильной геометрической формы (продолжение)
|
№ п.п. |
Тело |
Положение оси |
|
Формула |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
Прямой тонкий |
Перпендикулярна |
|
|
|
|
|
|
|
|
|
|
стержень |
стержню |
|
|
|
|
1 |
|
|
ml2 |
|
|
|
|
|
|
12 |
|||||
|
|
длина l, |
и проходит через |
|
|
|
|
|
|
|
|
|
|
масса m |
его центр масс |
|
|
|
|
|
|
|
|
|
7 |
Прямой тонкий |
Перпендикулярна |
|
|
|
|
|
|
|
|
|
|
стержень |
стержню |
|
|
|
|
31 ml2 |
|||
|
|
длина l, |
и проходит через |
|
|
|
|
|
|
|
|
|
|
масса m |
его конец |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
Тонкая прямоугольная |
Перпендикулярна |
|
|
|
|
|
|
|
|
|
|
пластина |
пластине |
|
1 |
m(a2 + b2) |
|||||
|
|
|
12 |
||||||||
|
|
длина a, |
и проходит через |
|
|
|
|
|
|
|
|
|
|
ширина b |
её центр масс |
|
|
|
|
|
|
|
|
|
9 |
Тонкостенная сфера |
Проходит |
|
|
|
|
|
|
|
|
|
|
радиус r, |
через |
|
|
|
|
32 mr2 |
|||
|
|
масса m |
центр сферы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
Сплошной |
Проходит |
|
|
|
|
|
|
|
|
|
|
шар |
через |
|
|
|
|
52 mr2 |
|||
|
|
радиус r, |
центр шара |
|
|
|
|
|
|
|
|
|
|
масса m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
Сплошной |
Ось |
|
|
|
|
|
|
|
|
|
|
конус |
конуса |
|
|
|
3 |
|
mr2 |
||
|
|
|
|
|
10 |
||||||
|
|
радиус r, |
|
|
|
|
|
|
|
|
|
|
|
масса m |
|
|
|
|
|
|
|
|
|
|
12 |
Квадрат |
Перпендикулярна |
|
|
|
|
|
|
|
|
|
|
сторона a, |
плоскости квадрата |
|
|
|
|
61 ma2 |
|||
|
|
масса m |
и проходит через |
|
|
|
|
|
|
|
|
|
|
|
его центр масс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
Правильный |
Перпендикулярна |
|
|
|
|
|
|
|
|
|
|
треугольник |
плоскости треугольника |
|
|
|
1 |
ma2 |
|||
|
|
|
|
12 |
|||||||
|
|
сторона a, |
и проходит через |
|
|
|
|
|
|
|
|
|
|
масса m |
его конец |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|