

лаб_Датчики_мех_величин
.pdf3. Проверка работоспособности лабораторной установки
Для проверки работоспособности необходимо:
−подключить стенд с помощью сетевого кабеля к сети 220 В, 50 Гц;
−включить стенд выключателем SА1, при этом должен загореться встроенный в него индикатор «Питание»;
−включить питание функционального блока «Датчики частоты вращения» выключателем SA4, при этом должен загореться встроенный в него индикатор;
−подключить вольтметр PV1 в режиме измерения постоянного напряжения к выходам тахогенератора, а входы А, В и ┴ индикатора PF2 – к выходам оптического энкодера. Изменяя скорость вращения приводного двигателя, необходимо наблюдать изменение показаний вольтметра в диапазоне 0,01…15 В,
ана индикаторе PF2 – изменение количества отсчитываемых энкодером импульсов.
4. Экспериментальное определение передаточных характеристик тахогенератора постоянного тока и инкрементального оптического энкодера
4.1. Снятие и построение передаточной характеристики холостого хода тахогенератора постоянного тока
Для снятия экспериментальной характеристики подключить вольтметр к выходным клеммам Uвых0 тахогенератора. Плавно изменяя скорость приводного двигателя с помощью ручки регулятора скорости, снять не менее 20 точек через равные промежутки, как в сторону увеличения скорости, так и в сторону ее уменьшения.
Данные занести в табл. 1.
Таблица 1
n, об/мин
Uвых0, В
Построить зависимость Uвых0=f(n). Эта зависимость должна быть практически линейной.
4.2. Снятие и построение передаточной характеристики тахогенератора постоянного тока при нагрузке
Для снятия передаточной характеристики при нагрузке на выходе тахогенератора необходимо подключить к выходам тахогенератора нагрузку Rнагр1 (100 – 470 – 1000 – 4700 – 10000 Ом). Плавно изменяя скорость приводного двигателя с помощью ручки регулятора скорости, снять не менее 20 точек через равные промежутки, как в сторону увеличения скорости, так и в сторону ее уменьшения. Данные занести в табл. 2.
31

Нагрузка, Ом
Таблица 2
100 |
n, об/мин |
|
Uвых, В |
||
|
…n, об/мин
|
Uвых, В |
|
10000 |
n, об/мин |
|
Uвых, В |
||
|
Построить зависимости Uвых=f(n) на тех же графиках, что и зависимо-
сти Uвых0=f(n).
По построенным экспериментальным характеристикам Uвых=f(n) определить абсолютные и относительные погрешности, обусловленные только нели-
нейностью характеристик Uвых=f(n), соответствующих Rнагр1 ≠ ∞. при этом за идеальную характеристику Uвых=f(n) необходимо принять характеристику, со-
ответствующую Rнагр1 ≠ ∞ (10000 Ом).
4.3. Снятие и построение временной характеристики инкрементального оптического энкодера
Для снятия экспериментальной характеристики подключить входы А и ┴ индикатора PF2 к выходным клеммам Z и ┴ энкодера. Плавно изменяя скорость приводного двигателя с помощью ручки регулятора скорости, наблюдать скорость изменения количества импульсов на индикаторе PF2.
С помощью осциллографа, подключившись к выходам A, В и ┴ энкодера в двухканальном режиме можно наблюдать последовательности импульсов, частота которых зависит от скорости вращения приводного двигателя. При подключении к выходу Z энкодера можно наблюдать нулевой импульс, частота появления которого равна скорости вращения двигателя в об/мин, и зависит также от частоты вращения двигателя.
32
5. Требования к отчёту
Отчет должен содержать: а) цель работы;
б) основные технические характеристики исследуемых датчиков; в) экспериментальные данные, расчётные значения требуемых параметров
и графиков по каждому из проведенных экспериментов; г) анализ полученных экспериментальных данных, сравнение полученных
данных с паспортными, выводы.
6. Контрольные вопросы
1. Какие машины называются тахогенераторами, каков принцип их рабо-
ты?
2.Назовите основные погрешности ТГ постоянного тока, их причины и пути снижения.
3.Каковы причины нелинейности передаточных характеристик ТГ при на-
грузке?
4.Какие устройства называют энкодерами? Объясните принцип работы абсолютного и инкрементального оптических энкодеров?
5.Каковы преимущества абсолютных и инкрементальных энкодеров?
6.Какие приборы и субблоки необходимо использовать при исследовании работы тахогенератора и энкодера;
7.Опишите порядок проведения лабораторной работы. Какие эксперименты необходимо провести. Какие характеристики датчиков нужно снять?
8.Опишите, какой вид, на ваш взгляд, должны иметь экспериментальные характеристики тахогенератора и энкодера.
33
Лабораторная работа № 4. Изучение датчиков углового положения
Цель работы
1.Изучить режимы работы и основные характеристики инкрементального оптического энкодера, вращающегося трансформатора, работающего в синус- но-косинусном и потенциометрического датчика.
2.Овладеть методами экспериментального исследования данных устройств и определения точности преобразования угла поворота в электрический сигнал.
3.Сравнить экспериментальные характеристики с теоретическими и оценить погрешности.
4.Определить сравнительные качества синусных, косинусных обмоток синусно-косинусных трансформаторов.
5.Определить значения погрешностей потенциометрического датчика.
Программа работы
Дома изучить принцип работы, назначение и технические характеристики ВТ и потенциометрического датчика, схемы их подключения, а также основные узлы и возможности лабораторного стенда.
В лаборатории:
–пройти тестирование по теоретической части;
–снять и построить передаточную характеристику оптического энкодера;
–снять экспериментальные и построить теоретические характеристики холостого хода для синусной обмотки ВТ;
–снять экспериментальные и построить теоретические характеристики холостого хода для косинусной обмотки ВТ;
–снять характеристики синусной обмотки ВТ при нагрузке;
–снять характеристики косинусной обмотки ВТ при нагрузке;
–снять характеристики ВТ при вторичном симметрировании;
–снять и построить экспериментальные характеристики потенциометрического датчика на холостом ходу;
–снять и построить экспериментальные характеристики потенциометрического датчика при нагрузке;
–проанализировать полученные результаты, сформулировать выводы;
–выполнить отчет о проделанной работе.
34
Пояснения к работе
1. Общие теоретические сведения
В лабораторной работе исследуются следующие датчики углового положе-
ния:
−инкрементальный оптический энкодер TRD-S/SH фирмы Automation Di-
rect.
−вращающийся трансформатор 2,5ВТ;
−потенциометрический датчик ПТП-11-5;
Основные теоретические сведения о принципах работы вращающихся трансформаторов и потенциометрических датчиков, а также технические характеристики и габаритные размеры используемых в работе датчиков в Прил. 4. Теоретические данные по оптическому энкодеру представлены Прил.3.
2. Описание лабораторной установки для изучения инкрементального энкодера, вращающегося трансформатора и потенциометрического датчика
Прежде, чем приступить к экспериментальному исследованию вращающегося трансформатора и потенциометрического датчика, необходимо ознакомиться с принципом их действия (Прил. 4) и схемой расположения обмоток и гнезд по мнемограмме на стенде. Необходимо также изучить назначение элементов стенда.
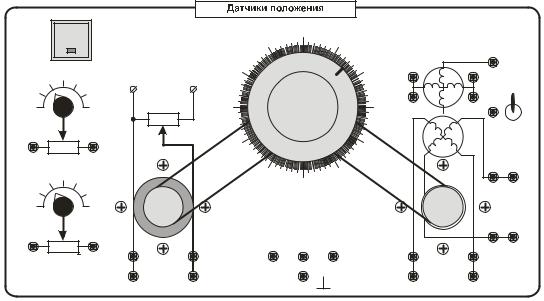
Субблок «Датчики положения» лабораторного стенда представлен на рис. 1. Данный блок представляет собой ВТ, оптический энкодер и потенциометрический датчик угла поворота, соединенные ременными передачами. Кроме того, на валу энкодера жестко закреплена ручка с меткой для грубого определения угла поворота.
Гнезда А, В и ┴ необходимы для подключения выходов оптического энко-
дера к измерителю PF2.
В левой части функционального блока «Датчики положения» установлены переключатели магазинов сопротивлений, позволяющие ступенчато изменять сопротивления нагрузочных резисторов Rнагр1 и Rнагр2.
На панели также расположены гнезда В1 и В2, К1 и К2, Ucos и Usin, соединенные соответственно с концами первичной, компенсационной, косинусной и синусной обмоток ВТ для сборки схемы эксперимента и подключения вольтметра или осциллографа.
Исследуемый потенциометрический датчик включен по схеме делителя напряжения. На панели расположены гнезда UВЫХ, соединенные соответственно с общим выводом и выводом движка потенциометрического датчика для сборки схемы эксперимента и подключения вольтметра. При этом вольтметр и нагрузка включаются параллельно нижнему плечу потенциометра.
35
SA5 |
|
|
|
|
|
0 |
|
|
Вращающийся |
|
|
|
|
|
|
Потенциометрический |
330 |
30 |
|
|
|||
|
|
|
|
датчик |
|
|
трансформатор |
|
|||
|
|
|
|
|
|
|
|
|
|||
|
4 |
|
|
300 |
|
|
|
60 |
К2 |
|
|
3 |
5 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
=5 В |
|
|
|
|
В1 |
В2 |
|
||
2 |
|
|
6 |
|
|
|
|
Внеш. |
|||
1 |
|
|
7 |
270 |
|
|
|
90 |
К1 |
|
Uп |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
S1 |
C2 |
Внутр. |
|
|
|
|
|
|
|
|
|
|
|
|
Rнагр1, Ом |
|
240 |
|
|
|
120 |
C1 |
S2 |
|
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
3 |
4 |
5 |
|
|
210 |
180 |
150 |
|
|
|
|
2 |
|
|
6 |
|
|
|
|
|
|
|
|
1 |
|
|
7 |
|
|
Энкодер |
|
|
|
|
Ucos |
|
|
|
|
|
A |
B |
Z |
|
|
|
|
Rнагр2, Ом |
|
Uвых |
|
|
|
|
Usin |
|
|
||
Рис. 1. Субблок для исследования датчиков углового положения
На положительный и общий выводы потенциометра подано постоянное напряжение 5 В.
Для питания ВТ в схеме стенда предусмотрен встроенный генератор синусоидальных колебаний амплитудой 10 В и частотой 400 Гц. Кроме того, в конструкции стенда предусмотрен переключатель режима питания ВТ: в положении «Внутр.» ВТ питается от встроенного генератора, в режиме «Внеш.» – от внешнего источника переменного напряжения. Конструкцией ВТ и лабораторного стенда предусмотрено первичное и вторичное симметрирование.
3. Проверка работоспособности лабораторной установки
Для проверки работоспособности необходимо:
−подключить стенд с помощью сетевого кабеля к сети 220 В, 50 Гц;
−включить стенд выключателем SА1, при этом должен загореться встроенный в него индикатор «Питание»;
−включить питание функционального блока «Датчики положения» выключателем SA5, при этом должен загореться встроенный в него индикатор;
−подключить вольтметр PV1 в режиме измерения переменного напряже-
ния к косинусной Ucos и синусной Usin обмоткам. Вращая ротор ВТ, наблюдать изменение показаний вольтметра в диапазоне 0,01…10 В;
−подключить вольтметр PV1 в режиме измерения постоянного напряже-
ния к выходным клеммам потенциометрического датчика Uвых. Вращая ротор датчика, наблюдать изменение показаний вольтметра в диапазоне 0…5 В.
36

4. Экспериментальное определение характеристик оптического энкодера, вращающегося трансформатора и потенциометрического датчика угла поворота
4.1. Снятие и построение передаточной характеристики инкрементального оптического энкодера.
Для снятия экспериментальной передаточной характеристики энкодера подключить Входы A, B и ┴ индикатора PF2 соответственно к выходам
A, B и ┴ энкодера. Вращая ручку от 0° до 360°, снять не менее 20 точек через
равные промежутки, как по часовой стрелке, так и против нее, обязательно включая 0–90–180–360. При этом фиксировать значения угла поворота на индикаторе в режиме «α, град» и тут же фиксировать число импульсов на том же индикаторе, переключившись в режим «Имп.».
Данные занести в табл. 1.
Таблица 1
α, град
N, число импульсов
По итогам эксперимента построить передаточную характеристику N=f(α). По формуле N0 = N/α определить разрешающую способность оптического энкодера.
4.2. Снятие и построение характеристики холостого хода для синусной обмотки.
Для снятия экспериментальной характеристики подключить вольтметр к зажимам обмотки Usin. Входы A, B и ┴ индикатора PF2 подключить соответст-
венно к выходам A, B и ┴ энкодера. Установить тумблером режим индикации
«α, град». Вращая ручку от 0° до 360°, снять не менее 20 точек через равные промежутки, как по часовой стрелке, так и против нее, обязательно включая 0– 90–180–360. Отметить положение ручки (αmin) при котором Usin минимально. В дальнейших экспериментах учитывать Δα=αmin как постоянную погрешность и определить фактическое значение угла поворота ротора.
Данные занести в табл. 2.
Таблица 2
Измерение |
α, град |
|
|
|
|
Usin, В |
|
|
|
|
|
|
U1, В |
|
|
|
|
Расчет |
α, град |
|
|
|
|
К, о.е. |
|
|
|
|
|
|
|
|
|
|
Коэффициент Кm определяется по (2), для максимального значения Usin.
37
Построить зависимость Usin=f(α). Эта зависимость должна практически не отличаться от идеальной синусоиды.
4.3. Снятие и построение характеристики холостого хода для косинусной обмотки.
Для снятия экспериментальной характеристики подключить вольтметр к зажимам обмотки Ucos. Дальнейшие действия производятся согласно последовательности, представленной в 4.2 и заносятся в табл. 3. Значение Кm необходимо определить для Ecos max и α=0.
Следует убедиться в равенстве коэффициентов Кm для обеих обмоток.
Таблица 3
Измерение |
α, град |
|
|
|
|
Ucos, В |
|
|
|
|
|
|
U1, В |
|
|
|
|
Расчет |
α, град |
|
|
|
|
К, о.е. |
|
|
|
|
|
|
|
|
|
|
4.4. Снятие характеристик синусной обмотки при нагрузке.
Для этого подключить нагрузку Rнагр1=1000, 470 Ом к синусной обмотке, установив соответствующие перемычки. Вольтметр подключается к гнездам Usin. Вращая ручку, изменять угол α в диапазоне 0÷360°,снять значения Usin=f(α) при нагрузке. Результаты занести в табл. 4.
Таблица 4
Измерение |
α, град |
|
|
|
|
U’sin, В |
|
|
|
|
|
|
RН, Ом |
|
|
|
|
Расчет |
Usin, В |
|
|
|
|
UВЫХ, В |
|
|
|
|
|
|
UВЫХ%, % |
|
|
|
|
Значения |
UВЫХ и UВЫХ% определить по формулам: |
||||
|
Usin=UsinM·sinα, UsinM =EsinM из 4.2 при α=90°; |
||||
|
|
UВЫХ= U’sin – Usin; |
|||
|
UВЫХ%= 100(U’sin – Usin)/ Usin max. |
||||
По данным табл. 4 построить опытную кривую U’sin =f(α), а также расчет-
ные кривые Usin , UВЫХ , UВЫХ %. Для наглядности, аналогично рис. 1 постро-
ить в диапазоне α=0÷90°. На одном графике Usin, UВЫХ, UВЫХ%. 4.5. Снятие характеристик косинусной обмотки при нагрузке.
Для этого подключить нагрузку Rнагр1=1000, 470 Ом к косинусной обмотке, установив соответствующие перемычки. Вольтметр подключается к гнездам Ucos.
38
Характеристики снимаются аналогично 4.4, Ucos max =Ecos max из 4.3 при α=0°. Результаты занести в табл. 5.
Таблица 5
α, град Измерение U’cos, В
RН, Ом
Ucos, В
Расчет UВЫХ, В
UВЫХ%, %
4.6. Снятие характеристик ВТ при первичном симметрировании.
Собрать при помощи перемычек схему ВТ с первичным симметрированием, соединив накоротко гнезда К1 и К2.
Вращая ручку в диапазоне α=0÷360° снять характеристики U’sin, U’cos= f(α). Результаты свести в табл. 6.
Таблица 6
α, град Измерение U’sin, В
U’cos, Ом
Usin, В
Расчет Ucos, В
UВЫХ, В
4.7. Снятие характеристик ВТ при вторичном симметрировании.
Собрать при помощи перемычек схему ВТ с вторичным симметрированием, установив Rнагр1sin= Rнагр2cos=1000, 470 Ом.
Вращая ручку в диапазоне α=0÷360° снять характеристики U’sin, U’cos= f(α). Результаты свести в табл. 7.
Таблица 7
Измерение |
α, град |
|
|
|
|
U’sin, В |
|
|
|
|
|
|
U’cos, Ом |
|
|
|
|
Расчет |
Usin, В |
|
|
|
|
Ucos, В |
|
|
|
|
|
|
UВЫХ, В |
|
|
|
|
Убедиться в близости полученных характеристик к синусоидальным, построив U’sin, U’cos, UВЫХ = f(α).
39
4.8. Снятие и построение характеристики холостого хода потенциометрического датчика угла поворота.
Для снятия экспериментальной характеристики подключить вольтметр PV1 к клеммам потенциометрического датчика UВЫХ. Вращая ручку от 0° до 360° снять не менее 20 точек через равные промежутки по часовой стрелке и после этого против нее, обязательно включая 0–90–180–360. Данные занести в табл. 8.
Таблица 8
По часовой стрелке |
α, град |
|
|
|
|
UВЫХ0, В |
|
|
|
|
|
|
|
|
|
|
|
Против |
α, град |
|
|
|
|
часовой стрелки |
UВЫХ0, В |
|
|
|
|
Построить зависимость UВЫХ0=f(α). Эта зависимость должна быть практически линейная. На одном графике зависимость, полученная при вращении рукоятки по часовой стрелке. На другом – против часовой.
4.9. Снятие и построение характеристики потенциометрического датчика угла поворота под нагрузкой
Для снятия экспериментальной характеристики подключить вольтметр PV1 к зажимам обмотки UВЫХ. К этим же клеммам подключить нагрузочное сопротивление Rнагр1, величина которого изменяется с помощью галетного переключателя от 100 до 10000 Ом. Вращая ручку от 0° до 360° снять не менее 20 точек через равные промежутки по часовой стрелке и после этого против нее, обязательно включая 0–90–180–360. Данные занести в табл. 9.
Таблица 9
|
|
По часовой стрелке |
α, град |
|
|
|
|
|
470 |
UВЫХ0, В |
|
|
|
|
|
|
|
|
|
|
|
||
Ом |
Против часовой |
α, град |
|
|
|
|
|
|
|
|
|
|
|||
|
стрелки |
UВЫХ0, В |
|
|
|
|
|
, |
|
По часовой стрелке |
α, град |
|
|
|
|
Нагрузка |
|
|
|
|
|
|
|
… |
|
UВЫХ0, В |
|
|
|
|
|
|
Против часовой |
α, град |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
стрелки |
UВЫХ0, В |
|
|
|
|
|
|
По часовой стрелке |
α, град |
|
|
|
|
|
10000 |
UВЫХ0, В |
|
|
|
|
|
|
|
|
|
|
|
||
|
Против часовой |
α, град |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
стрелки |
UВЫХ0, В |
|
|
|
|
Построить зависимости UВЫХ=f(α) на тех же графиках, что и зависимости
UВЫХ0=f(α).
40