

Электрический привод / Лабраб №2 по ЭП
.docЛабораторная работа №2
Исследование асинхронного электродвигателя
Цель работы
Исследование механических характеристик и переходных процессов асинхронного электродвигателя (АД) посредством моделирования в среде MatLab (модель akzvirt10 из сборника моделей Компмод ППС).
Задание
-
Получить путем моделирования (снять) кривые переходных процессов ω(t) и M(t) при пуске двигателя посредством подачи номинального напряжения на его статор и моменте нагрузки Mс=0 с дальнейшим приложением момента нагрузки, равного номинальному моменту двигателя, используя модель двигателя akzvirt10, блок-схема которой приведена на рис. 1, причем:
ω – угловая скорость двигателя (1/с);
M – момент двигателя (Нм);
t – текущее время (с).
-
По полученным кривым определить время tп.п переходного процесса, перерегулирование σ и отношение Mmax/Mн максимального пускового момента к номинальному.
-
Варьируя величину Mc построить, используя установившиеся значения параметров ω(t) и M(t), полученные при моделировании переходных процессов, механические характеристики двигателя при внешнем сопротивлении фазы ротора Rр.вн=0, а затем – при внешнем сопротивлении Rр.вн=(3÷5)Rr′, причем
Rr′ – внутреннее сопротивление фазы ротора, приведенное к статору.
Механические характеристики построить при изменении момента нагрузки от Mс=0 до Mс=Mк, причем
Mк – критический (максимальный) момент двигателя в установившемся режиме работы, значение которого следует определить эксперимен-тально и сравнить со значением, приведенным в каталоге.
-
Варьируя величину Mc построить, используя установившиеся значения параметров ω(t) и M(t), полученные при моделировании переходных процессов, механические характеристики двигателя при внешнем сопротивлении фазы ротора Rр.вн=0, но при напряжении на статоре, равном половине номинального. Механические характеристики построить при изменении момента нагрузки от Mс=0 до Mс=Mк, причем величину Mк следует определить экспериментально и сравнить с его расчетным значением.
-
Все полученные механические характеристики построить на одном графике.
![]()
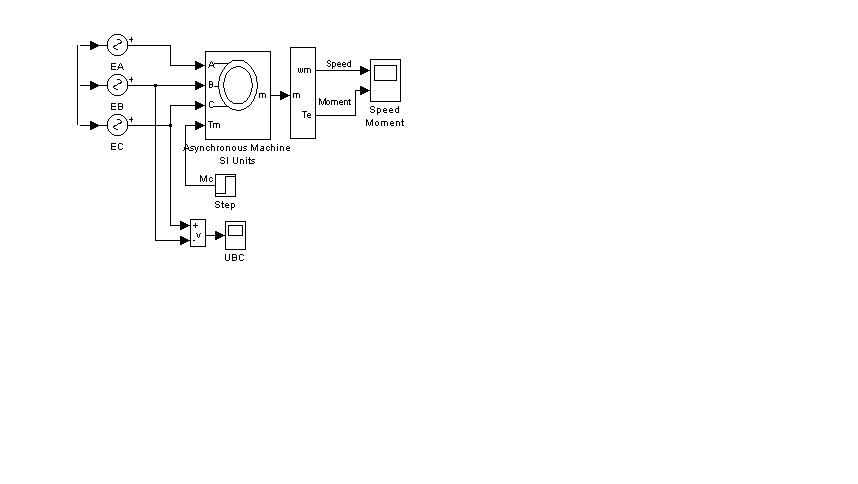
Рис. 1. Моделирование прямого пуска АД с набросом нагрузки
Исходные данные
Исходные данные по электродвигателю должны быть взяты из табл. 1. Для всех вариантов электродвигателя, приведенных в табл. 1, полагаем, что номинальное фазное напряжение на статоре равно Uф.н=220 В, номинальная частота питающего напряжения равна fн=50 Гц, а синхронная угловая скорость ωс=157 рад ⁄ с (или nс=1500 об ⁄ мин).
Технические данные асинхронных электродвигателей
-
Вариант задания
Тип двигателя
Номинальная мощность
Номинальная угловая скорость
Пусковой момент
Критический момент
Момент инерции
Рн, кВт
н, с-1
Мп/Мн
Мк/Мн
Jдв, кгм2
0
4А100L4УЗ
4,0
149,9
2,0
2,4
0,011
1
4А102М4УЗ
5,5
151,4
2,0
2,2
0,017
2
4А132S4УЗ
7,5
152,5
2,0
2,3
0,028
3
4А132М4УЗ
11,0
152,7
2,0
2,3
0,040
4
4А160S4УЗ
15,0
153,5
1,4
2,3
0,10
5
4АН160S4УЗ
18,5
152,1
1,3
2,1
0,127
6
4АН160М4УЗ
22,0
152,6
1,3
2,1
0,127
7
4АН180S4УЗ
30,0
153,5
1,2
2,2
0,180
8
4АН180М4УЗ
37,0
153,8
1,2
2,2
0,220
9
4АН200М4УЗ
45,0
154,3
1,3
2,5
0,350
Номер выбранного для выполнения варианта задания должен соответствовать последней цифре учебного шифра.
Методические указания
-
Описание виртуальной лабораторной установки akzvirt10 [2] (рис. 1)
Блок асинхронного двигателя с КЗ ротором Asynchronous Machine с заданием значений параметров в системе СИ (SI Units) получает питание от трех источников фазного напряжения EA, EB и EC, соединенных в звезду. Линейное напряжение между фазами B и C отображается осциллографом UBC, а измеренные значения угловой скорости ω (Speed) и момента (Moment) двигателя отображаются осциллографом Speed-Moment. Величина момента нагрузки Mс задается блоком Step.
-
Задание параметров виртуальной лабораторной установки
Для задания параметров АД следует произвести двойной щелчок левой клавишей мыши по блоку Asynchronous Machine. Появится окно настройки параметров АД, показанное на рис. 2.
В самом верхнем окне настройки АД указывается, что моделируется двигатель с КЗ ротором (Squirrel-cage). В следующем окне указано, что данный АД моделируется в системе координат, вращающейся синхронно с ротором (Rotor). В следующем ниже окне указывают номинальную мощность (Nom. power) моделируемого двигателя в ваттах, номинальное фазное напряжение (В) источника питания и номинальную частоту (Гц) питающего напряжения.
В следующих трех окнах приводятся параметры Т-образной схемы замещения [1] асинхронного двигателя:
Rs – активное сопротивление фазы обмотки статора (Ом);
Lls – индуктивность рассеяния фазы обмотки статора (Гн);
Rr′ – активное сопротивление фазы обмотки ротора, приведенное к статору (Ом);
Llr′ – индуктивность рассеяния фазы обмотки ротора, приведенная к ротору (Гн);
Lm – индуктивность цепи намагничивания двигателя (Гн).
Кроме того полагают активное сопротивление цепи намагничивания двигателя равным нулю (Rm=0), т. е. в данной модели не учитываются потери в стали.
В предпоследнем, считая сверху, окне указывают момент инерции J электропривода ( кгм2), коэффициент трения в подшипниках и число пар полюсов двигателя. В нашей модели коэффициент трения полагаем равным нулю, т. е. не учитываем механические потери в двигателе.
В последнем окне указывают начальные.условия, которые в данной лабораторной работе не изменяются.
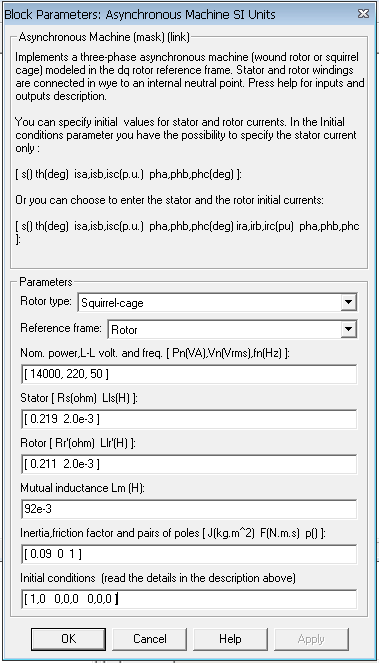
Рис. 2. Окно настройки параметров асинхронного двигателя
Задание остальных параметров данной лабораторной установки также начинается двойным щелчком левой клавишей мыши по соответствующему блоку на схеме лабораторной установки. После открытия окна задания параметров следует задавать их, руководствуясь указаниями над полями, которые предназначены для размещения в них значений параметров.
-
Расчет параметров моделируемого двигателя
По справочным данным, приведенным в табл. 1, определяем:
λ = Mк ⁄ Mн; Mн = Pн ⁄ ωн; Mк = λMн; sн = (ωс – ωн) ⁄ ωс.
Далее определяем:
xк
= 3Uф.н2
⁄ (2ωсMк);
sк
= sн(λ
+
![]() ).
).
Расчетные параметры моделируемого двигателя:
Rs ≈ Rr′ = sкxк;
Lls ≈ Llr′ ≈ xк ⁄ (4π fн);
Lm = (30÷40) Lls;
J = 1,5Jдв.
Число пар полюсов определяем по формуле pп = 60fн ⁄ nс.
-
Отчет по данной работе должен содержать:
-
задание с указанием принятых исходных данных;
-
блок-схему модели akzvirt10 исследуемого двигателя;
-
полученные посредством моделирования кривые переходных процессов;
-
время tп.п переходного процесса, перерегулирование σ и отношение Mmax/Mном максимального пускового момента к номинальному, определенные по полученным кривым переходных процессов;
-
построенные заданные графики механических характеристик.
Литература
-
Г. Б. Онищенко. Электрический привод: Учебник. – М.: ИЦ «Академия», 2006 (и дальнейшие издания). – Главы 4-5, 8.
-
С. Г. Герман-Галкин. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0. – СПб.: КОРОНА принт, 2001 (и дальнейшие издания). – Гл. 1; §4.1.1.