

ТАУ (курс 3, сессия 1)_МГОУ / Контрольные работы / Задание
.doc
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ УНИВЕРСИТЕТ
КАФЕДРА «ЭЛЕКТРОПРИВОД И АВТОМАТИЗАЦИЯ
ПРОМЫШЛЕННЫХ УСТАНОВОК»
Грехов В.П., Куприков А.В., Ключникова Г.А.
ЗАДАНИЕ
НА КОНТРОЛЬНЫЕ РАБОТЫ ПО КУРСУ
«ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
для студентов специальности 140604 «Электропривод и автоматизация промышленных установок и технологических комплексов»
Москва
2002 г.
Студенты полного срока обучения выполняют контрольные работы № 1 и № 2.
Студенты сокращенного срока обучения выполняют контрольную работу № 2.
КОНТРОЛЬНАЯ РАБОТА № 1
1. Построить ЛАЧХ, ЛФЧХ и переходные функции типовых динамических звеньев:
а) пропорционального
в) интегрирующего
с) дифференцирующего
d) апериодического первого порядка
е) апериодического второго порядка
f) колебательного
Параметры звеньев приведены в табл.1.
2. Свернуть структурную схему рис.1 или рис.2, выбираемую в соответствии с последней цифрой шифра.
3. Перенести входные сигналы структурной схемы рис.3 или рис.4 на один суммирующий вход. Вариант схемы выбирается по последней цифре шифра.
4. Для графиков переходных процессов рис.5а или рис.5б определить время tПП, перерегулирование σ и число колебаний nК. Вариант графика переходного процесса выбирается по последней цифре шифра. Зона допустимых установившихся отклонений ±5%.
5. Оценить по критерию Гурвица устойчивость системы регулирования, имеющей характеристическое уравнение вида
![]() .
.
Коэффициенты характеристического уравнения выбираются из табл.2 по последней цифре шифра.
Таблица 1
Параметры типовых динамических звеньев
|
Вариант |
Ка |
Тв |
Тс |
Тd |
Т1е |
Т2е |
Т0f |
ξf |
|
Последняя цифра шифра четная |
10 |
0,1 |
0,01 |
1,0 |
0,5 |
0,2 |
0,02 |
0,2 |
|
Последняя цифра шифра нечетная |
100 |
0,01 |
0,1 |
0,5 |
0,3 |
0,6 |
0,05 |
0,4 |
Символ параметра соответствует типу динамического звена по заданию.
Таблица 2
Коэффициенты характеристического уравнения
|
Вариант |
а3 |
а2 |
а1 |
а0 |
|
Последняя цифра шифра четная |
1 |
0,5 |
0,2 |
1 |
|
Последняя цифра шифра нечетная |
20 |
10 |
4 |
1 |
![]()
![]()
Х
 (р) +
У(р)
(р) +
У(р)









10


Рис.1. Четный вариант
![]()
![]()
Х
 (р)
У(р)
(р)
У(р)

 _ _
_ _






100

0,1


Рис.2. Нечетный вариант
![]()
![]()

 _
_
Х


 (р)
f(p)
M(p)
У(р)
(р)
f(p)
M(p)
У(р)










 _ _
_ _

10


Рис.3. Четный вариант


 f(p)
M(p)
f(p)
M(p)
![]()
![]()
Х


 (р)
У(р)
(р)
У(р)








 _
_
5р+1
0,2

Рис.4. Нечетный вариант
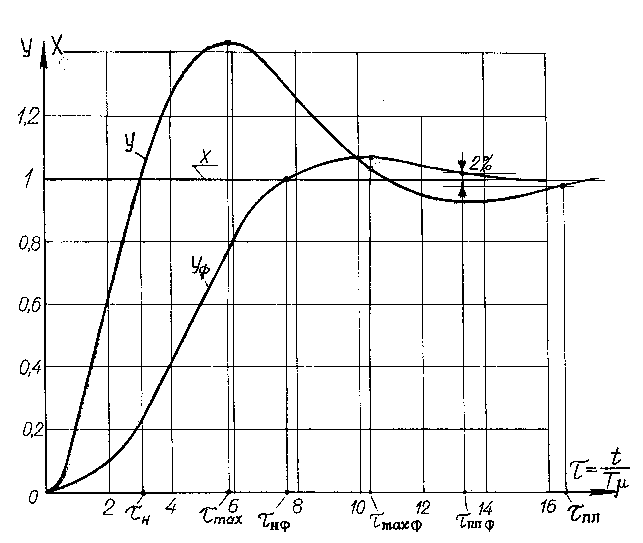
Рис.5. Переходная функция контура регулирования, настроенного на симметричный оптимум. У – без фильтра на входе; Уф – с фильтром на входе
Вопросы для самопроверки к контрольной работе № 1
-
По каким соотношениям рассчитываются ЛАЧХ и ЛФЧХ динамических звеньев?
-
Сформулируйте правила преобразования структурных схем с отрицательной и положительной обратными связями.
-
Как записывается передаточная функция последовательно соединенных динамических звеньев?
-
Как записывается передаточная функция параллельно соединенных динамических звеньев?
-
Сформулируйте правила переноса входных сигналов в структурной схеме системы.
-
По каким показателям оцениваются динамические свойства систем регулирования?
-
Как влияет на устойчивость системы регулирования расположение корней характеристического уравнения на комплексной плоскости?
-
Какие показатели системы регулирования оцениваются с помощью критерия Гурвица и в чем его сущностью?
КОНТРОЛЬНАЯ РАБОТА № 2
-
Для структурной схемы системы регулирования, приведенной на рис.6, в соответствии со своим вариантом из табл.3 выписать передаточные функции W1(p), W2(p) и W3(p) и дать их характеристику.
2. Построить ЛАЧХ и ЛФЧХ разомкнутого контура регулирования относительно сигнала обратной связи.
-
По типу динамических звеньев системы определить порядок астатизма системы по задающему воздействию Х(р) и возмущению F(p).
-
Определить установившиеся ошибки при отработке задающего воздействия Х(t) и возмущения f(t).
-
По ЛАЧХ разомкнутой системы регулирования (рис.6) найти передаточную функцию последовательного корректирующего звена, не меняющего порядок астатизма, но уменьшающего время переходного процесса tПП и перерегулирование σ.
-
Для своего варианта структурной схемы найти передаточную функцию цепи компенсации возмущения при реализации комбинированного управления.
Место
включ. коррект. звена.



 Δ(р)
F(р)
Δ(р)
F(р)
Х W1(p) W2(p)









_ Z(p)
W3(p)

Рис.6. Структурная схема системы регулирования
Таблица 3
Таблица параметров звеньев и воздействий
Вариант |
W1(p) |
W2(p) |
W3(p) |
Х(t) |
f(t) |
|
Последняя цифра шифра четная |
|
|
0,2 |
|
0,5 |
|
Последняя цифра шифра нечетная |
|
|
0,05 |
|
0,1 |
Вопросы для самопроверки к контрольной работе № 2
-
Начертите ЛАЧХ и ЛФЧХ динамических звеньев W1(p), W2(p) и W3(p).
-
Как определяется астатизм системы по каждому входному воздействию?
-
Как зависит точность отработки воздействия от порядка астатизма по этому входу?
-
Как вычисляется по передаточной функции величина установившейся ошибки?
-
Как взаимосвязаны динамические характеристики замкнутой системы регулирования с частотой среза и запасом по фазе разомкнутой системы?
-
Какие отличительные особенности имеют системы регулирования с комбинированным управлением?
-
Для чего выполняется коррекция системы автоматического регулирования?