

Глава 7. Электропривод с двигателями постоянного тока с последовательным возбуждением
7.1. Электромеханические характеристики двигателя постоянного тока с последовательным возбуждением
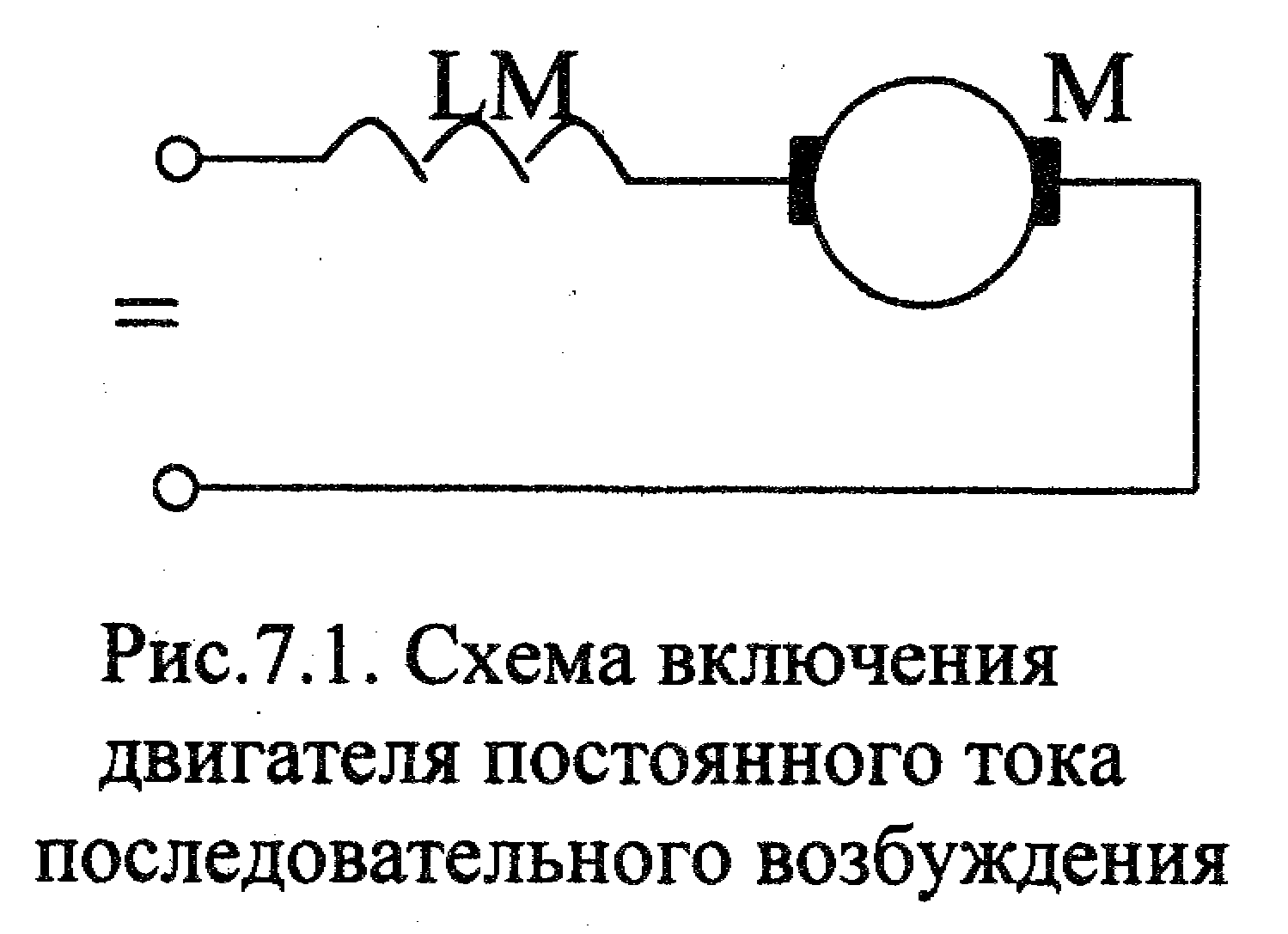
В рассматриваемых двигателях постоянного тока обмотка возбуждения включается (рис.7.1) последовательно с обмоткой якоря, в результате чего ток возбуждения равен току якоря и создаваемый им поток будет
![]()
 (7.1)
(7.1)
З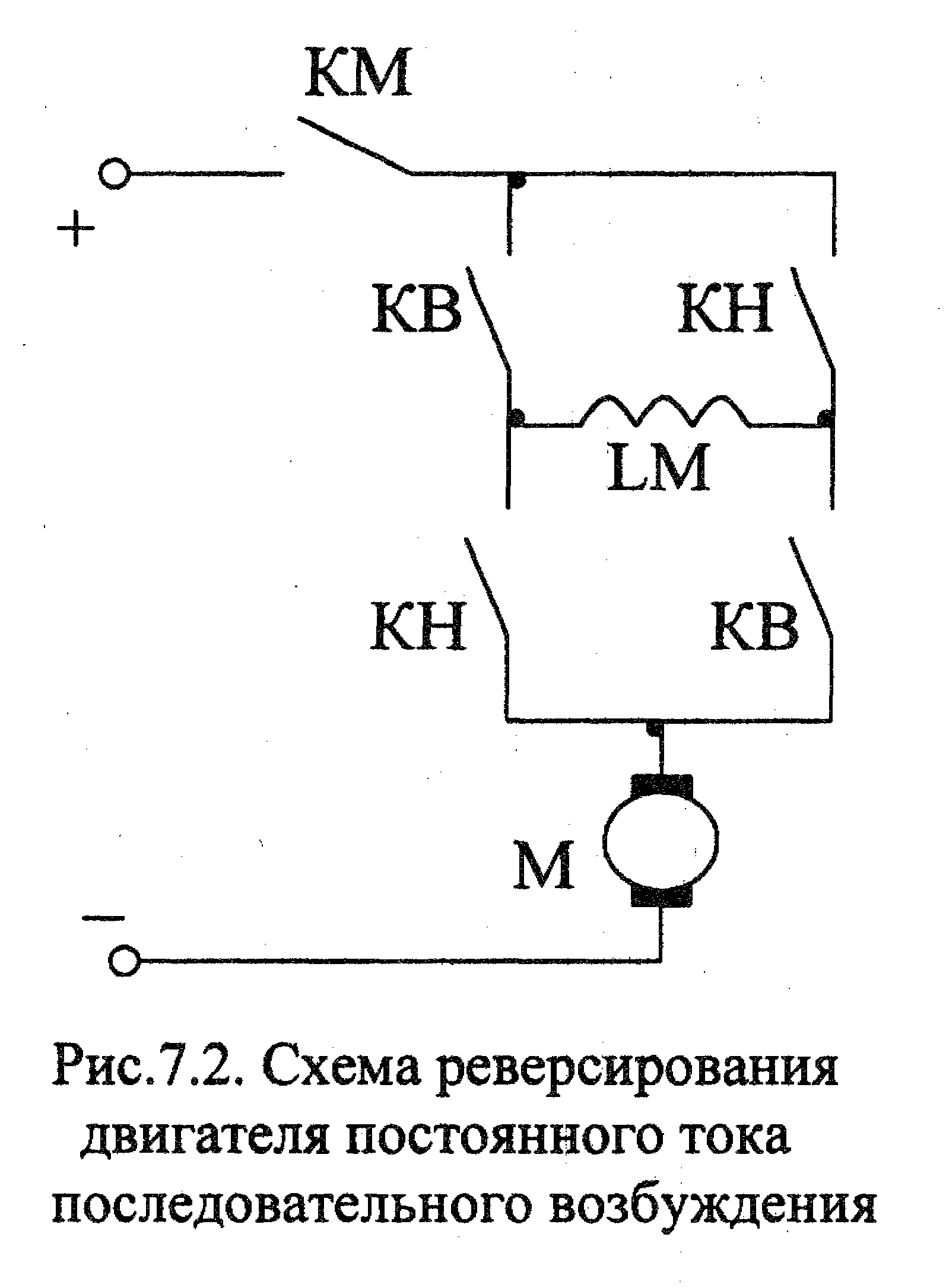 десь
а
– нелинейный коэффи-циент
десь
а
– нелинейный коэффи-циент
![]() ;
нелинейность этого коэффициента связана
с формой кривой намагничивания и
размагничивающим действием реак-ции
якоря; оба этих фактора проявляются при
больших токах
;
нелинейность этого коэффициента связана
с формой кривой намагничивания и
размагничивающим действием реак-ции
якоря; оба этих фактора проявляются при
больших токах
![]() ;
при малых токах якоря коэффициент а
можно считать величиной постоянной;
при токах якоря
;
при малых токах якоря коэффициент а
можно считать величиной постоянной;
при токах якоря
![]() машина насыщается, и величина потока
мало зависит от тока якоря. Соотношение
7.1 определяет свое-образие электромеханических
характеристик двигателя постоян-ного
тока последовательного возбуждения.
машина насыщается, и величина потока
мало зависит от тока якоря. Соотношение
7.1 определяет свое-образие электромеханических
характеристик двигателя постоян-ного
тока последовательного возбуждения.
Для изменения направления вращения двигателя последова-тельного возбуждения недостаточ-но изменить полярность напряже-ния, подводимого к двигателю, т.к. при этом изменится одновременно и направление тока в обмотке якоря и полярность потока воз-буждения. Поэтому для реверси-рования двигателя нужно изменить направление тока в одной из частей машины, например в обмотке возбуждения, оставив направление тока в обмотке якоря неизменным, как это показано на схеме рис.7.2.
Подставив (7.1) в (6.2) и (6.3), получим основные соотношения для рассматриваемых двигателей.
![]() (7.2)
(7.2)
![]() (7.3)
(7.3)
Соответственно, выражение для электромеханической и механической характеристик двигателя последовательного возбуждения будут:
![]() ; (7.4)
; (7.4)
![]() . (7.5)
. (7.5)
В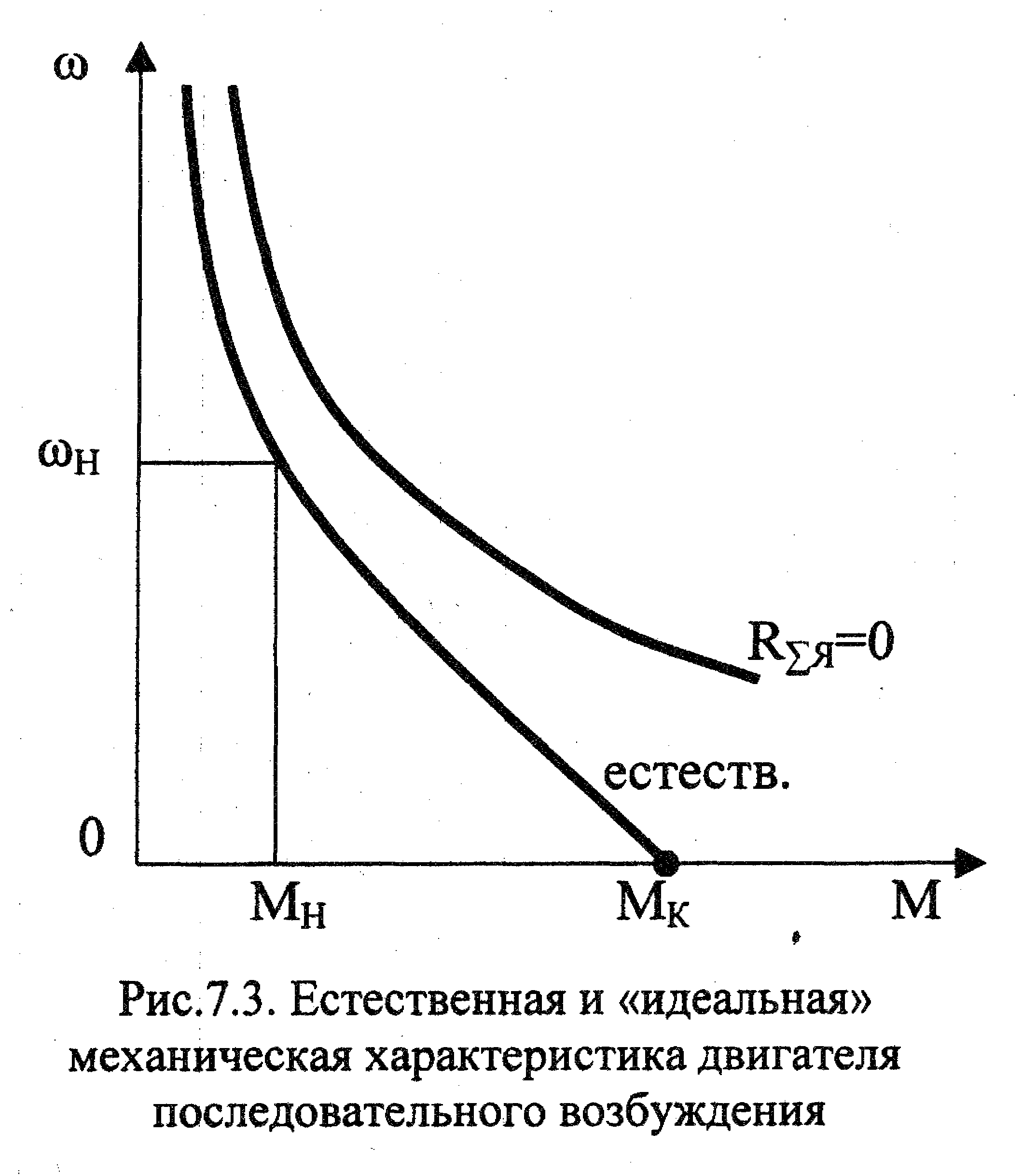 первом приближении механическую
характерис-тику двигателя постоянно-го
тока последовательного возбуждения,
если не учитывать насыщение магнит-ной
цепи, можно предста-вить в виде гиперболы,
не пересекающей ось орди-нат, а
асимптотически при-ближающуюся к ней.
Если положить (RЯ+Rв)=0,
то характеристика (см. рис. 7.3) не будет
пересекать и ось абсцисс. Такая
характерис-тика называется «идеаль-ной»;
выше нее характеристики быть не могут.
Реальная естественная характеристика
пересекает ось абсцисс в точке,
соответствующей току короткого замыкания
(момент Мк).
Если учитывать насыщение двигателя, то
при моментах меньших 0,8Мк
характеристика криволинейна и носит
гиперболический характер; при больших
значениях тока и момента поток вследствие
насыщения становится постоянным и
характеристика выпрямляется.
первом приближении механическую
характерис-тику двигателя постоянно-го
тока последовательного возбуждения,
если не учитывать насыщение магнит-ной
цепи, можно предста-вить в виде гиперболы,
не пересекающей ось орди-нат, а
асимптотически при-ближающуюся к ней.
Если положить (RЯ+Rв)=0,
то характеристика (см. рис. 7.3) не будет
пересекать и ось абсцисс. Такая
характерис-тика называется «идеаль-ной»;
выше нее характеристики быть не могут.
Реальная естественная характеристика
пересекает ось абсцисс в точке,
соответствующей току короткого замыкания
(момент Мк).
Если учитывать насыщение двигателя, то
при моментах меньших 0,8Мк
характеристика криволинейна и носит
гиперболический характер; при больших
значениях тока и момента поток вследствие
насыщения становится постоянным и
характеристика выпрямляется.
Характерной особенностью характеристик двигателя последовательного возбуждения является отсутствие точки идеального холостого хода. При уменьшении нагрузки скорость двигателя существенно возрастает, вследствие чего оставлять двигатель без нагрузки недопустимо.
Важным достоинством двигателей последовательного возбуждения является большая перегрузочная способность на низких скоростях. При перегрузке по току в 2,25-2,5 раза двигатель развивает момент 3,0-3,5 номинального. Это обстоятельство определило широкое использование двигателей последовательного возбуждения для электрических транспортных средств, где наибольшие моменты необходимы при трогании с места. Вторым важным достоинством двигателей последовательного возбуждения является отсутствие источника питания для цепи возбуждения двигателя.
Искусственные механические характеристики могут быть получены тремя способами: включением добавочного сопротивления в цепь якоря, изменением величины питающего напряжения и шунтированием обмотки якоря добавочным сопротивлением.
При введении добавочного сопротивления в цепь якоря жесткость механических характеристик уменьшается и уменьшается значение Мк (см.рис.7.4). Этот способ регулирования используется при пуске двигателя, когда ступени сопротивления перемыкаются пусковыми контакторами. На рис.7.4. показаны пусковые характеристики, соответствующие двухступенчатой схеме пуска. Длительная работа на реостатных характеристиках сопряжена со значительными потерями энергии в сопротивлениях.


Наиболее экономичным способом регулирования скорости двигателя последовательного возбуждения является изменение величины подводимого к двигателю напряжения. Механические характеристики, соответствующие этому способу регулирования, показаны на рис.7.5. По мере уменьшения напряжения они смещаются вниз от естественной характеристики. Внешне искусственные характеристики при регулировании изменением напряжения схожи с реостатными характеристиками, однако, есть существенная разница в этих способах регулирования. Реостатное регулирование сопряжено с потерей энергии в добавочных сопротивлениях, а при регулировании изменением напряжения дополнительные потери отсутствуют.
Д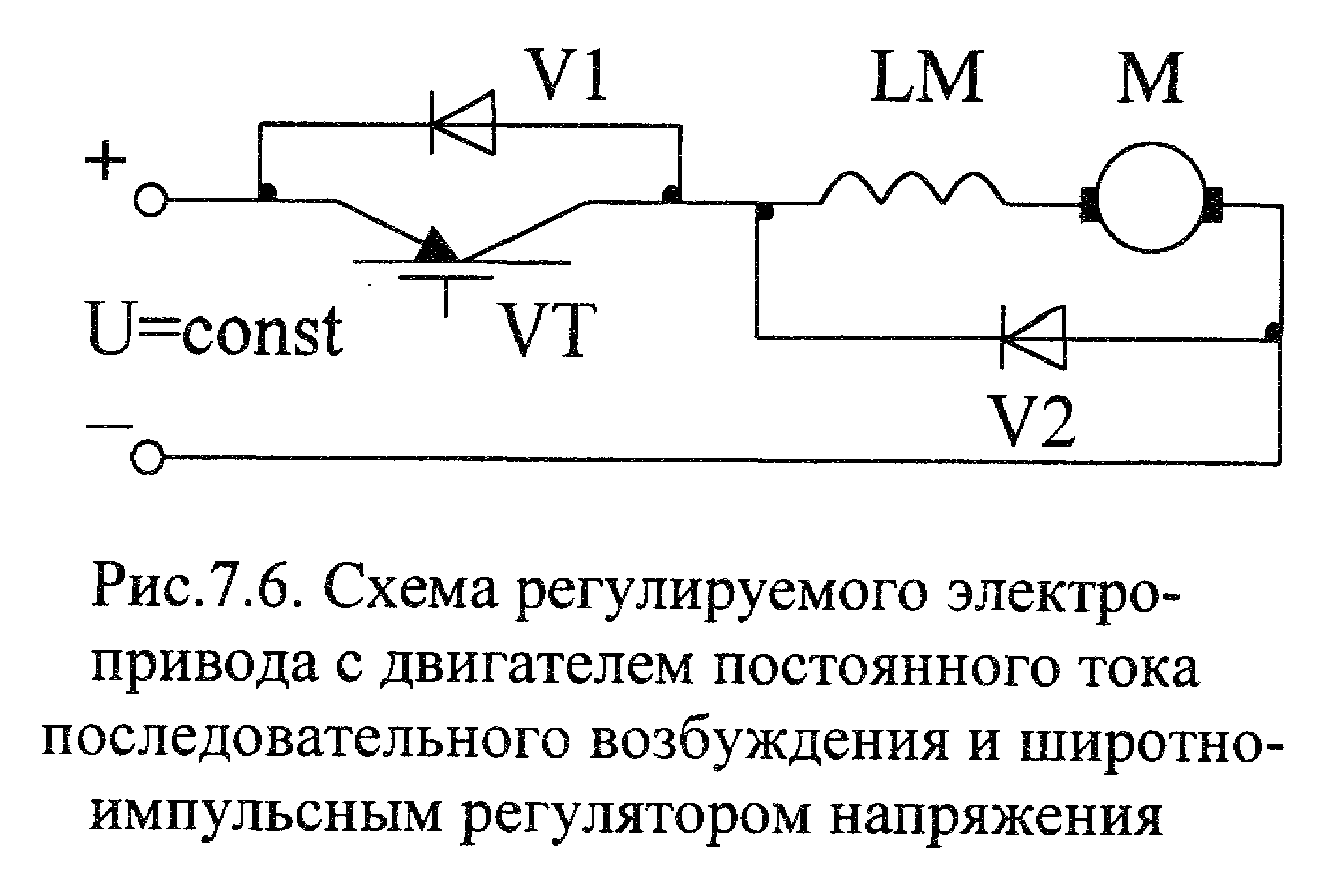 вигатели
последо-вательного возбуждения часто
получают питание от сети постоянного
тока или источника постоянного то-ка с
нерегулируемой вели-чиной напряжения.
Регули-рование напряжения на за-жимах
двигателя в этом случае целесообразно
про-изводить способом широт-но-импульсного
регулирования, который был рассмотрен
в §6.3. Упрощенная схема регулируемого
электропривода с двигателем постоянного
тока последовательного возбуждения и
широтно-импульсным регулятором напряжения
показана на рис.7.6.
вигатели
последо-вательного возбуждения часто
получают питание от сети постоянного
тока или источника постоянного то-ка с
нерегулируемой вели-чиной напряжения.
Регули-рование напряжения на за-жимах
двигателя в этом случае целесообразно
про-изводить способом широт-но-импульсного
регулирования, который был рассмотрен
в §6.3. Упрощенная схема регулируемого
электропривода с двигателем постоянного
тока последовательного возбуждения и
широтно-импульсным регулятором напряжения
показана на рис.7.6.
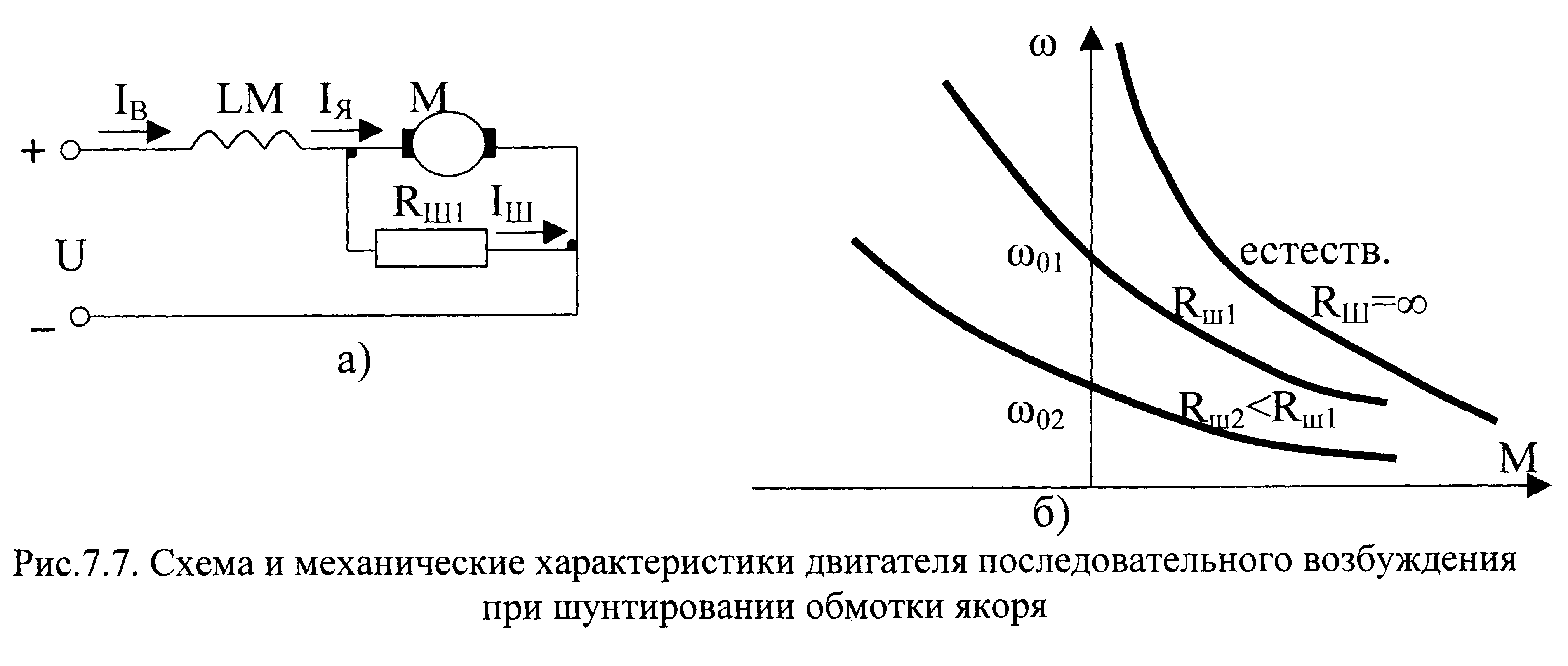
Изменение потока возбуждения в рассматриваемых двигателях возможно, если зашунтировать обмотку якоря сопротивлением (см.рис.7.7а). В этом случае ток возбуждения будет равен
![]() ,
,
т.е.
содержит постоянную составляющую, не
зависящую от нагрузки двигателя. При
этом двигатель приобретает свойства
двигателя смешанного возбуждения:
независимого и последовательного.
Благодаря независимому возбуждению
механические характеристики приобретают
большую жесткость и пересекают ось
ординат. Примерные механические
характеристики для этого способа
регулирования показаны на рис.7.7б.
Шунтирование якоря позволяет получить
устойчивую пониженную скорость при
отсутствии нагрузки на валу двигателя.
В данной схеме возможен переход двигателя
в режим рекуперативного торможения при
скорости
![]() или
или
![]() .
Существенным недостатком рассматриваемого
способа регулирования является его
неэкономичность, обусловленная большими
потерями энергии в шунтирующем
сопротивлении.
.
Существенным недостатком рассматриваемого
способа регулирования является его
неэкономичность, обусловленная большими
потерями энергии в шунтирующем
сопротивлении.
Д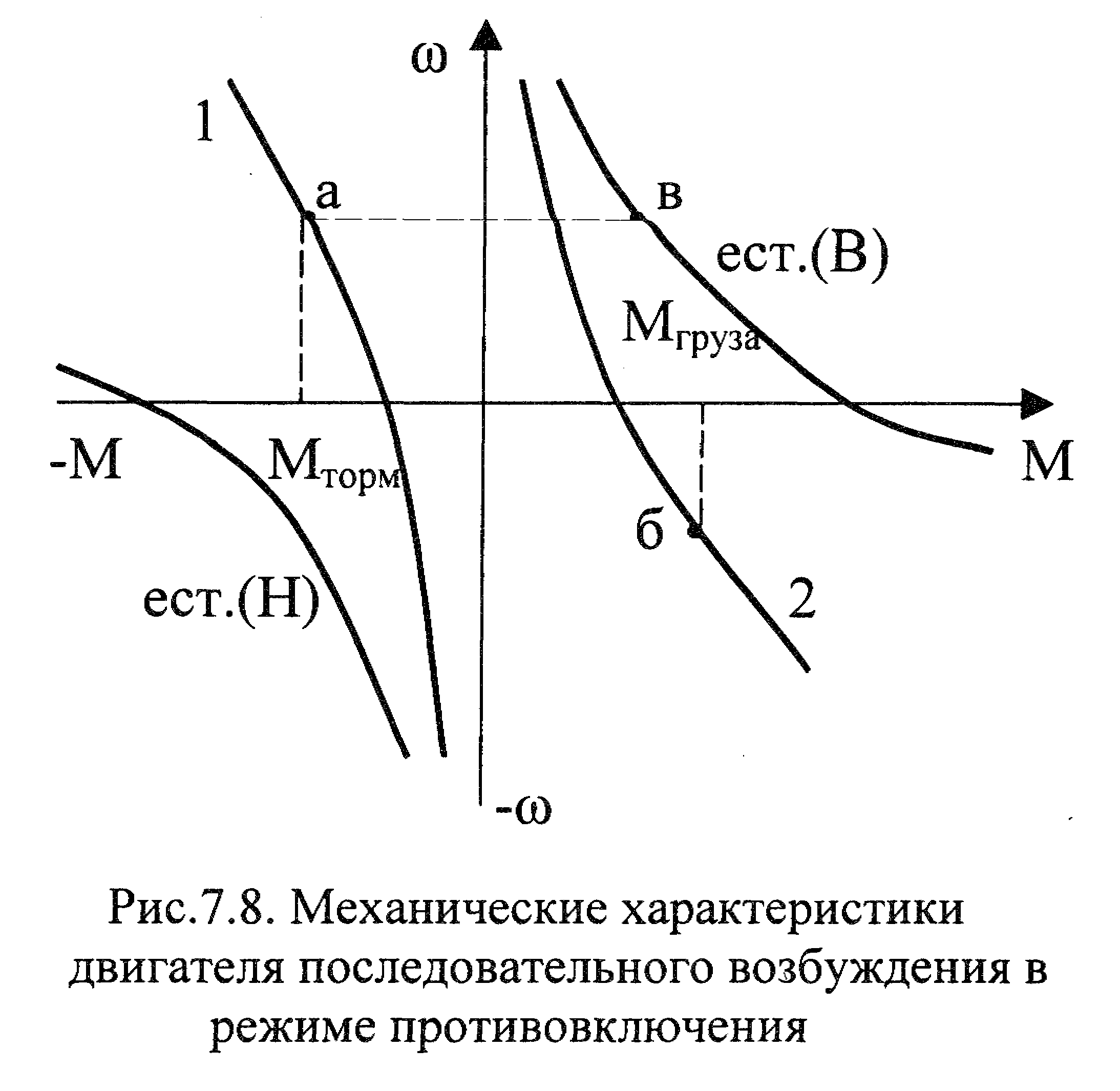 ля
двигателей последовательного возбуждения
характерны два режима торможения:
противовключением и динамический. В
режиме противовключения необходимо
включение добавочного сопротивления
в цепь яко-ря двигателя. На рис.7.8 показаны
механические характеристики для двух
вариантов режима противовключения.
Характерис-тика 1 получается, если при
работе двигателя в на-правлении «вперед»
(точ-ка «в») изменить направление тока
в обмотке возбуждения и одновре-менно
ввести в цепь двигателя добавочное
сопро-тивление. При этом дви-гатель
переходит в режим противовключения в
точке «а» с тормозным моментом Мторм,
под действием которого будет происходить
торможение двигателя.
ля
двигателей последовательного возбуждения
характерны два режима торможения:
противовключением и динамический. В
режиме противовключения необходимо
включение добавочного сопротивления
в цепь яко-ря двигателя. На рис.7.8 показаны
механические характеристики для двух
вариантов режима противовключения.
Характерис-тика 1 получается, если при
работе двигателя в на-правлении «вперед»
(точ-ка «в») изменить направление тока
в обмотке возбуждения и одновре-менно
ввести в цепь двигателя добавочное
сопро-тивление. При этом дви-гатель
переходит в режим противовключения в
точке «а» с тормозным моментом Мторм,
под действием которого будет происходить
торможение двигателя.
Второй случай режима противовключения возникает в режиме «протягивающего груза», когда в грузоподъемных механизмах производится спуск груза, а для подтормаживания спускаемого груза двигатель включается в направлении его подъема. При этом благодаря тому, что в цепь двигателя включено большое добавочное сопротивление (которому соответствует характеристика 2), двигатель под действием момента, создаваемого грузом, вращается в обратном направлении и будет работать в точке «б», в которой активный статический момент Мгруза уравновешивается тормозным моментом двигателя, работающего в режиме противовключения. Режим противовключения сопряжен со значительными потерями энергии в цепи двигателя и добавочного сопротивления.
Режим динамического торможения для двигателей последовательного возбуждения возможен в двух вариантах. В первом – якорь двигателя замыкается на сопротивление, а обмотка возбуждения питается от сети через добавочное сопротивление. Характеристики двигателя в этом режиме подобны характеристикам двигателя независимого возбуждения в режиме динамического торможения.
В
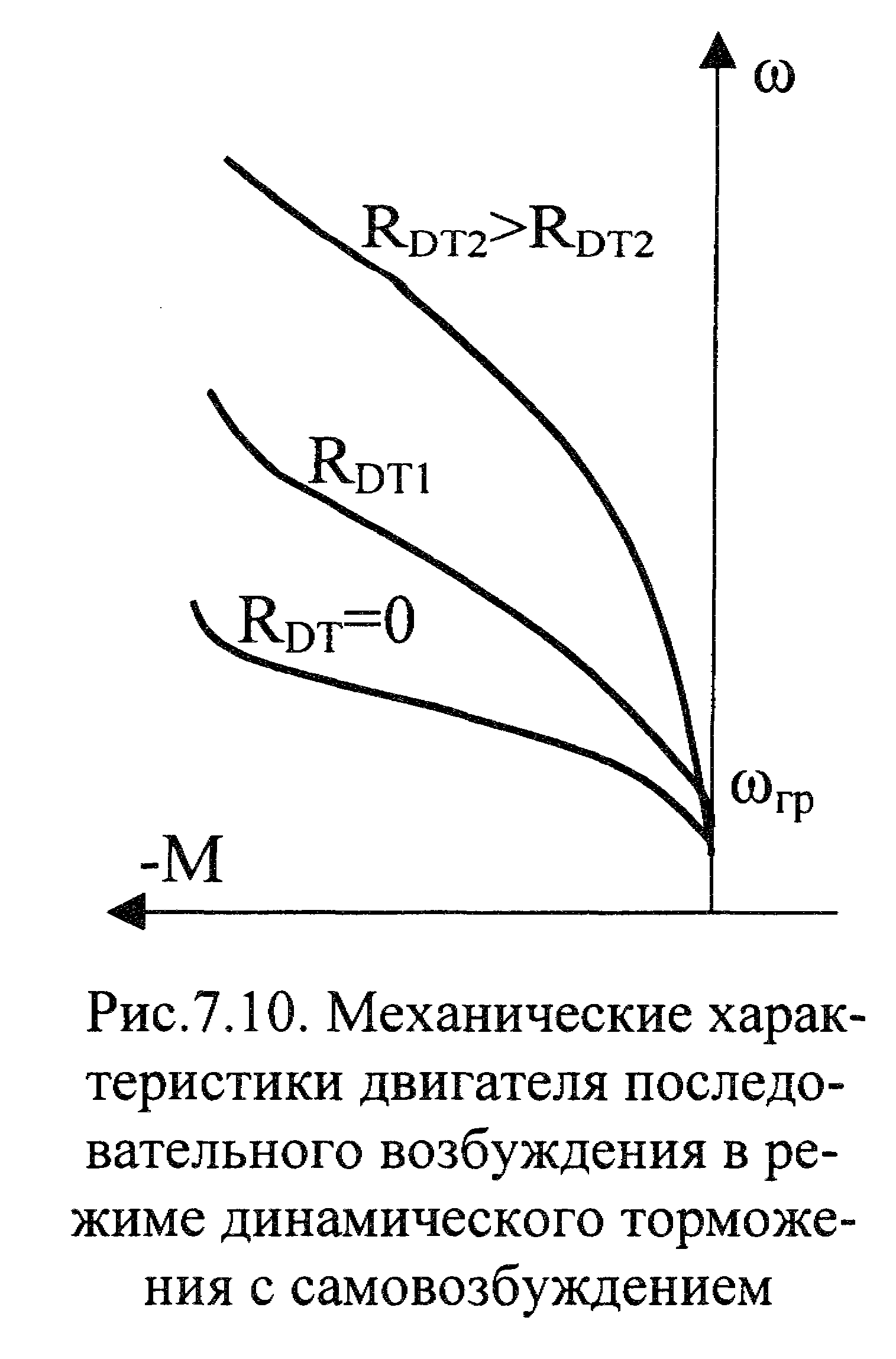 о
втором варианте, схема ко-торого показана
на рис.7.9, дви-гатель работает как
генератор с самовозбуждением. Особенность
данной схемы состоит в том, что необходимо
при переходе из дви-гательного режима
в режим дина-мического торможения
сохранить направление тока в обмотке
возбуждения во избежание размагничивания
машины. При размыкании контактора КМ
ток в обмотке возбуждения становится
равным нулю, но, так как магнитопровод
машины был намагничен, то сохраняется
остаточный поток возбуждения, благодаря
которому в обмотке якоря вращающегося
двигателя наводится э.д.с., под действием
которой при замыкании контактов КВ в
цепи: обмотка якоря – обмотка возбуждения
– сопротивление R
протекает ток, и машина самовозбуждается.
Этот процесс происходит, если скорость
двигателя будет больше граничной
скорости
о
втором варианте, схема ко-торого показана
на рис.7.9, дви-гатель работает как
генератор с самовозбуждением. Особенность
данной схемы состоит в том, что необходимо
при переходе из дви-гательного режима
в режим дина-мического торможения
сохранить направление тока в обмотке
возбуждения во избежание размагничивания
машины. При размыкании контактора КМ
ток в обмотке возбуждения становится
равным нулю, но, так как магнитопровод
машины был намагничен, то сохраняется
остаточный поток возбуждения, благодаря
которому в обмотке якоря вращающегося
двигателя наводится э.д.с., под действием
которой при замыкании контактов КВ в
цепи: обмотка якоря – обмотка возбуждения
– сопротивление R
протекает ток, и машина самовозбуждается.
Этот процесс происходит, если скорость
двигателя будет больше граничной
скорости
![]() .
Механические характеристики в режиме
динамического торможения с самовозбуждением
показаны на рис.7.10.
.
Механические характеристики в режиме
динамического торможения с самовозбуждением
показаны на рис.7.10.
Режим рекуперативного торможения в обычной схеме включения двигателя последовательного возбуждения невозможен. Для его осуществления необходимо шунтирование якоря двигателя, либо применение отдельной дополнительной обмотки независимого возбуждения.