

ТАУ (курс 3, сессия 1)_МГОУ / Учебник тау / Глава 8
.docнением величины подводимого постоянного напряжения. Благодаря своим хорошим регулировочным качествам вентильные двигатели получили широкое применение для привода различных промышленных машин и механизмов.
8.2. Электропривод по системе транзисторный коммутатор - вентильный двигатель с постоянными магнитами
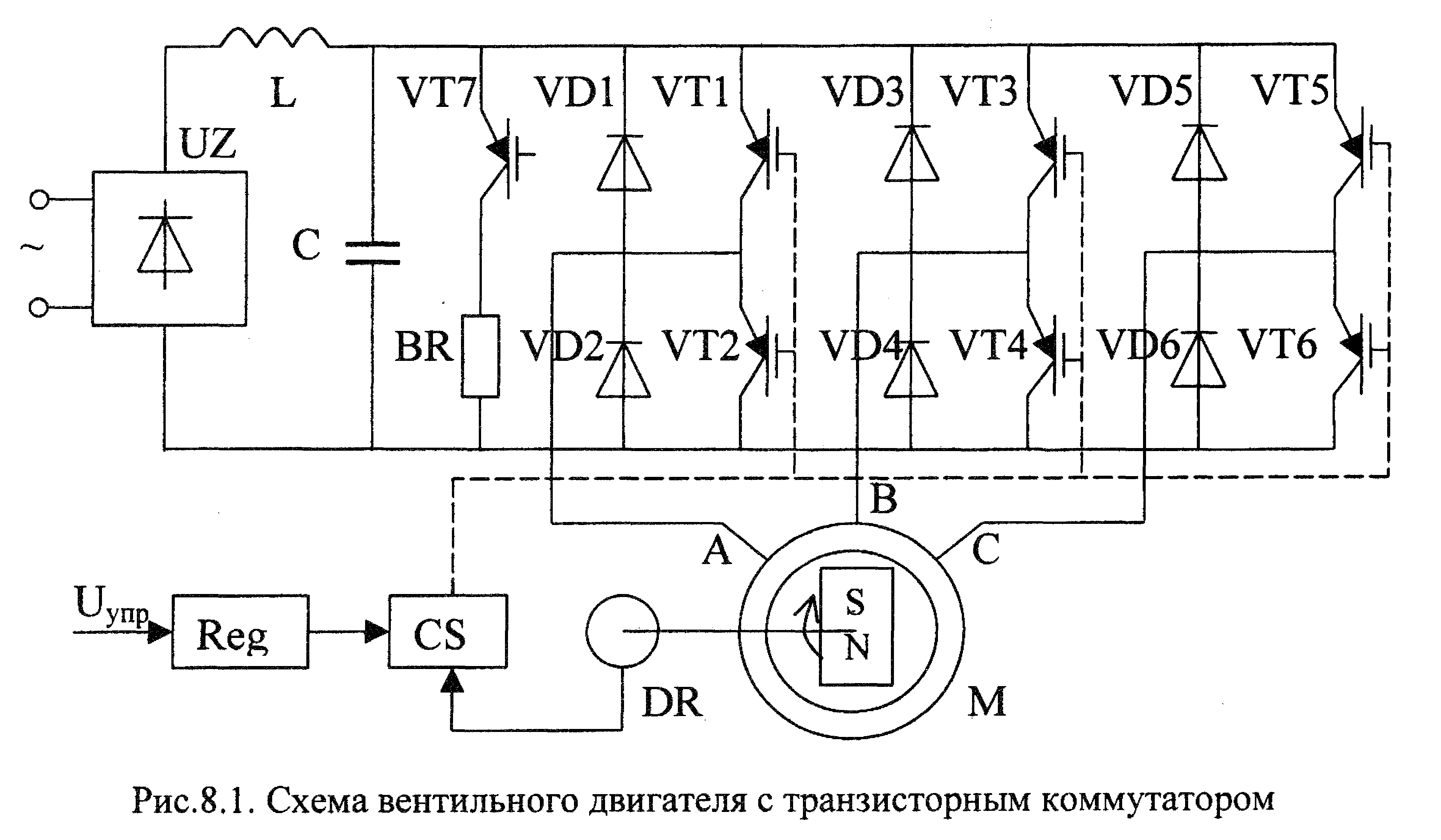
Вентильный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе. Трехфазные обмотки статора питаются постоянным током, подаваемым поочередно в две последовательно соединенные фазные обмотки. Переключение обмоток производится транзисторным коммутатором, выполненным по трехфазной мостовой схеме. Транзисторные ключи открываются и закрываются в зависимости от положения ротора двигателя. Схема вентильного двигателя представлена на рис.8.1.
Момент, создаваемый двигателем, определяется взаимодействием двух потоков: статора, создаваемого током в обмотках статора, и ротора, создаваемого высокоэнергетическими постоянными магнитами (на основе сплавов самарий-кобальт и других).
![]() , (8.1)
, (8.1)
где: θ – пространственный угол между векторами потоков статора и ротора;
рп – число пар полюсов.
Магнитный поток статора стремится повернуть ротор с постоянными магнитами, так, чтобы поток ротора совпал по направлению с потоком статора (вспомним магнитную стрелку компаса) [1-8].
Н аибольший
момент, создаваемый на валу ротора,
будет при угле между векторами потоков
равным
аибольший
момент, создаваемый на валу ротора,
будет при угле между векторами потоков
равным
![]() и будет уменьшаться до нуля по мере
сближения векторов потоков. Эта
зависимость показана на рис.8.2.
и будет уменьшаться до нуля по мере
сближения векторов потоков. Эта
зависимость показана на рис.8.2.
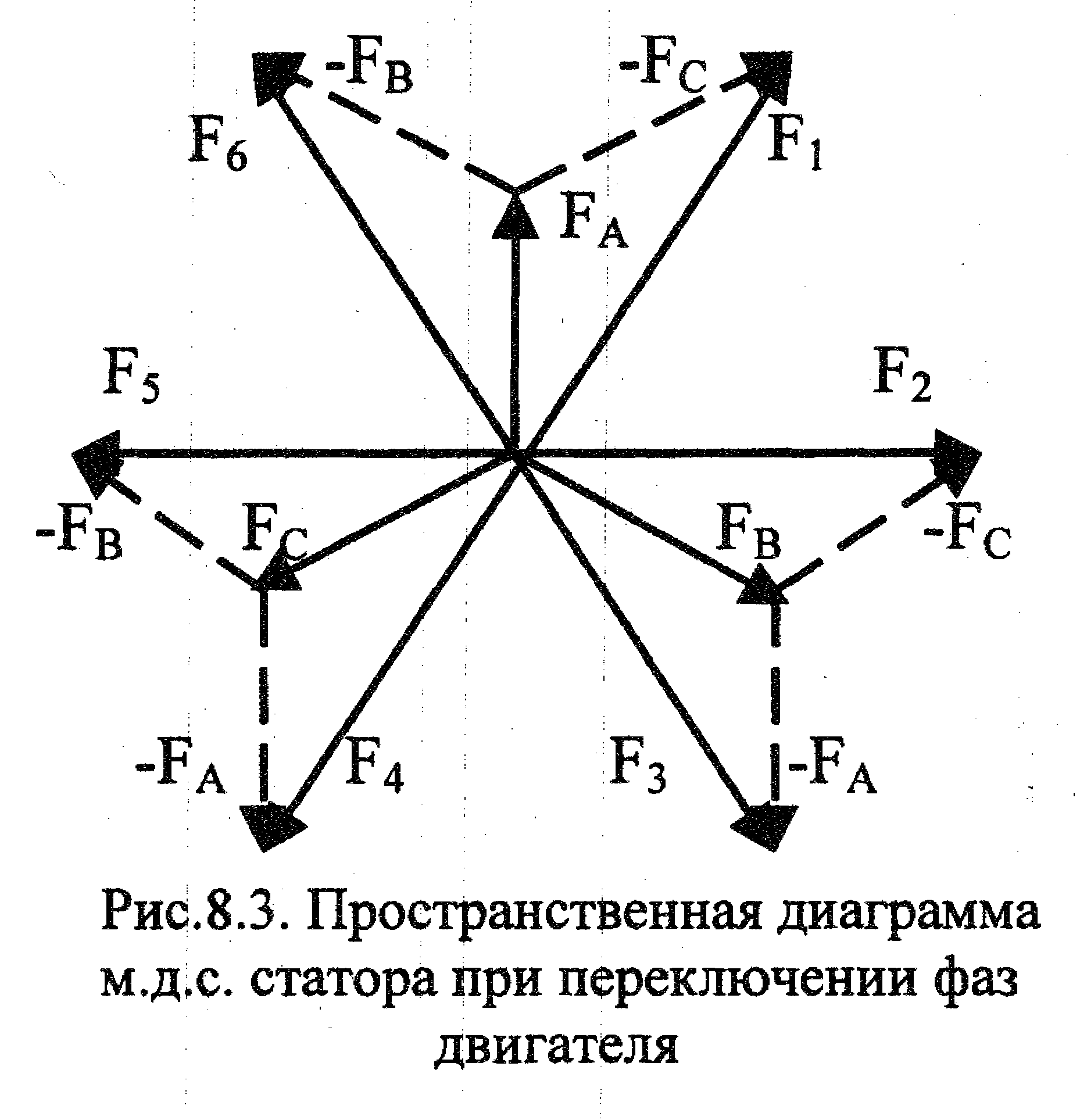
Рассмотрим пространс-твенную диаграмму векто-ров потоков, соответству-ющую двигательному режи-му (при числе пар полюсов рП=1). Предположим, что в данный момент включены транзисторы VT3 и VT2, (см. схему рис.8.1). Тогда ток проходит через обмотку фазы В и в обратном направлении через обмотку фазы А. Результирующий вектор м.д.с. статора будет занимать в пространстве положение F3 (см.рис.8.3). Если ротор занимает в этот момент положение, показанное на рис.8.4., то двигатель будет развивать в соответствии с 8.1 максимальный момент, под действием которого ротор будет поворачиваться по часовой стрелке. По мере уменьшения угла θ момент будет уменьшаться. Когда ротор повернется на 300 необходимо в соответствии с графиком на рис.8.2. переключить ток в фазах двигателя, так, чтобы результирующий вектор м.д.с. статора занял положение F4 (см.рис.8.3). Для этого нужно отключить транзистор VT3 и включить транзистор VT5.
Переключение фаз выполняет транзисторный коммутатор VT1-VT6, управляемый от датчика положения ротора DR; при этом угол θ поддерживается в пределах 900±300, что соответствует максимальному значению момента с наименьшими пульсациями. При рп=1 за один оборот ротора должно быть произведено шесть переключений, благодаря которым м.д.с. статора совершит полный оборот (см.рис.8.3). При числе пар полюсов больше единицы поворот вектора м.д.с. статора, а, следовательно, и ротора, составит 360/рп градусов.
Р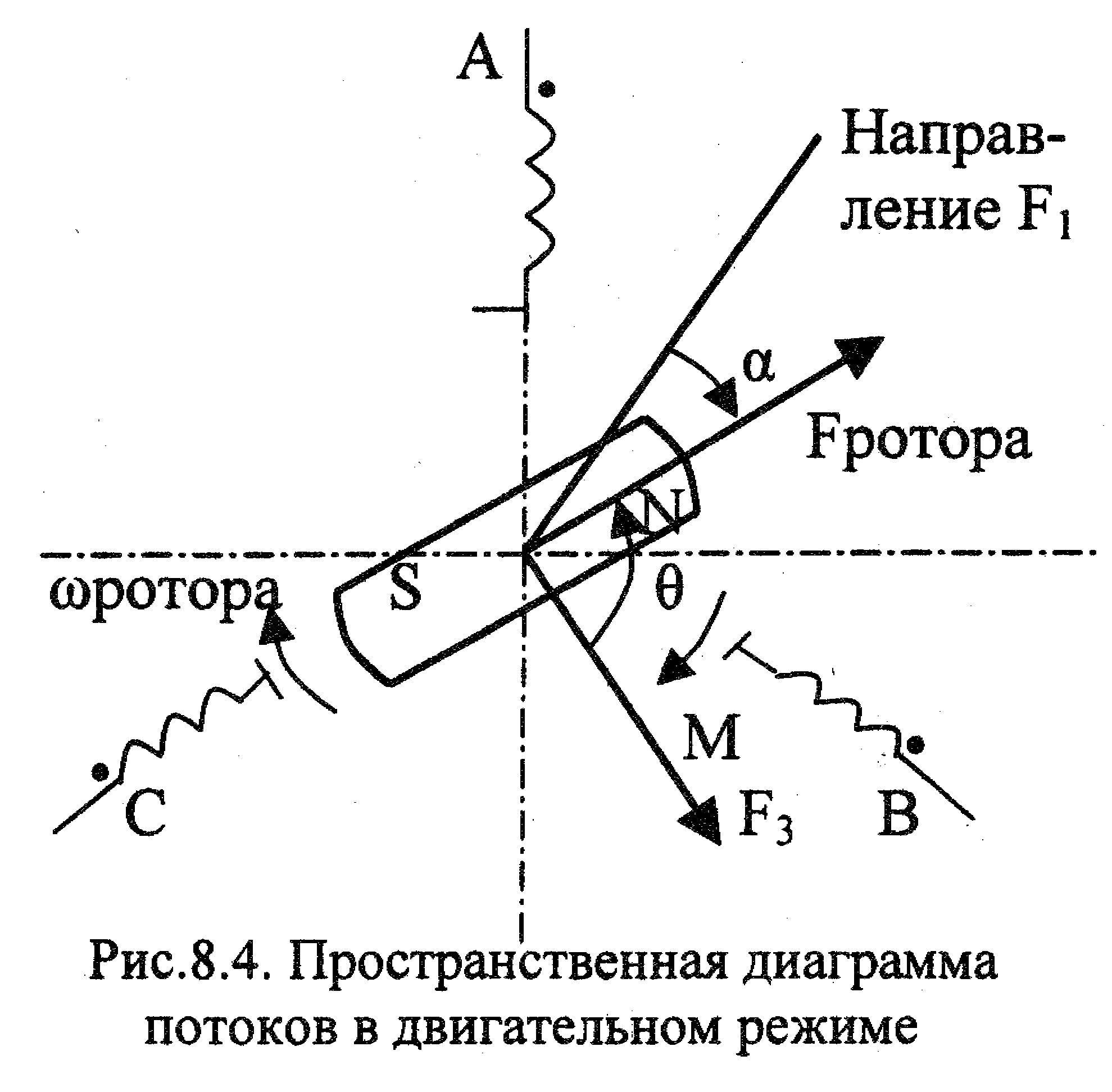
 егулирование
величины момента производится изменением
величины м.д.с. статора, т.е. изменением
средней величины тока в обмотках статора
егулирование
величины момента производится изменением
величины м.д.с. статора, т.е. изменением
средней величины тока в обмотках статора
![]() , (8.2)
, (8.2)
где: R1 – сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то э.д.с. Ея, наводимая в двух последовательно включенных обмотках статора будет пропорциональна скорости ротора. Уравнение электрического равновесия для цепей статора будет
![]() . (8.3)
. (8.3)
При отключении ключей ток в обмотках статора мгновенно не исчезает, а замыкается через обратные диоды и фильтровый конденсатор С.
Следовательно, регулируя напряжение питания двигателя U1, можно регулировать величину тока статора и момента двигателя
![]() . (8.4)
. (8.4)
Нетрудно заметить, что выражения (8.2 - 8.4) подобны аналогичным выражениям для двигателя постоянного тока, вследствие чего механические характеристики вентильного двигателя в данной схеме подобны характеристикам двигателя постоянного тока независимого возбуждения при Ф=const (см.рис.6.4).
Изменение напряжения питания вентильного двигателя в рассматриваемой схеме производится методом широтно-импульсного регулирования (см.§6.3). Изменяя скважность импульсов транзисторов VT1-VT6 в периоды их включенного состояния, можно регулировать среднюю величину напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы транзисторного коммутатора должен быть изменен таким образом, чтобы вектор м.д.с. статора отставал от вектора потока ротора. Тогда момент двигателя станет отрицательным. Поскольку на входе преобразователя установлен неуправляемый выпрямитель, то рекуперация энергии торможения в данной схеме невозможна. При торможении происходит подзаряд конденсатора фильтра С. Ограничение напряжения на конденсаторах осуществляется путем подключения разрядного сопротивления через транзистор VT7 [1-8]. Таким образом, энергия торможения рассеивается в разрядном сопротивлении.
8.3. Электропривод по системе тиристорный коммутатор – синхронный двигатель
В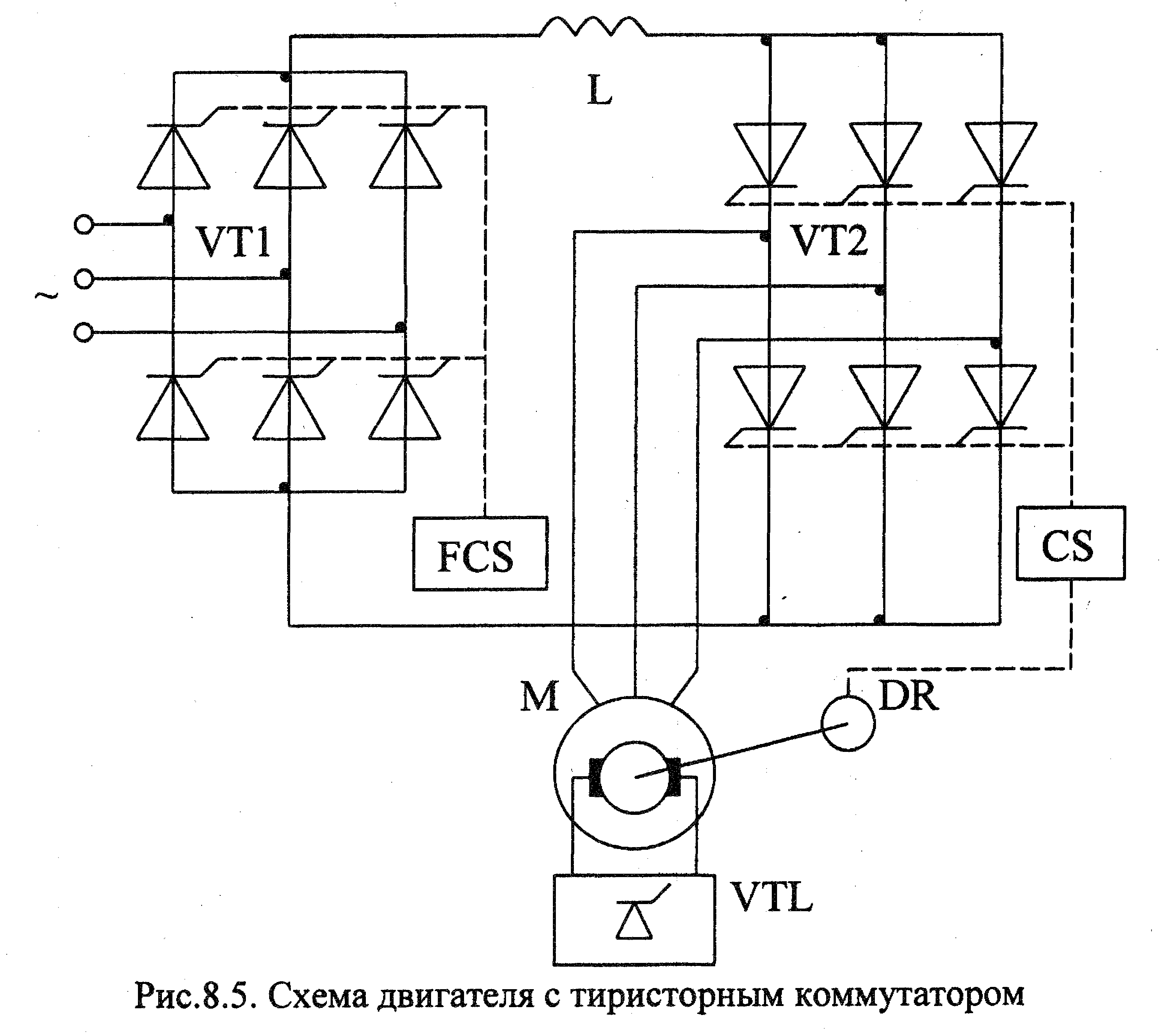 вентильном двигателе средней и большой
мощности обычно используются синхронные
двигатели обычной конструкции с
электромагнитным возбуждением. Поскольку
двигатели большой мощности имеют
напряжение статора 6,0 или 10,0кВ, то в
качестве вентильного коммутатора
используется тиристорный преобразователь,
состоящий из управляемого выпрямителя
и инвертора (см.рис.8.5). Инвертор выполняет
функции коммутатора, переключение
которого производится от датчиков
положения ротора. Поскольку тиристоры
являются полууп-равляемыми приборами,
то инвертор работает, как зависимый,
коммутируемый за счет э.д.с. двигателя,
наводимой в обмотках статора вращающимся
электромагнитным полем ротора. Для
обеспечения устойчивой коммутации
вентилей инвертора предусматривается
опережение угла их открывания на угол
β,
который составляет не менее 150,
что ведет к некоторому уменьшению
момента вентильного двигателя
вентильном двигателе средней и большой
мощности обычно используются синхронные
двигатели обычной конструкции с
электромагнитным возбуждением. Поскольку
двигатели большой мощности имеют
напряжение статора 6,0 или 10,0кВ, то в
качестве вентильного коммутатора
используется тиристорный преобразователь,
состоящий из управляемого выпрямителя
и инвертора (см.рис.8.5). Инвертор выполняет
функции коммутатора, переключение
которого производится от датчиков
положения ротора. Поскольку тиристоры
являются полууп-равляемыми приборами,
то инвертор работает, как зависимый,
коммутируемый за счет э.д.с. двигателя,
наводимой в обмотках статора вращающимся
электромагнитным полем ротора. Для
обеспечения устойчивой коммутации
вентилей инвертора предусматривается
опережение угла их открывания на угол
β,
который составляет не менее 150,
что ведет к некоторому уменьшению
момента вентильного двигателя
![]() .
.
Благодаря включению в цепь постоянного тока дросселя со значительной величиной индуктивности, преобразователь VT1-VT2 работает как источник тока, величина которого регулируется путем импульсно-фазового регулирования выходного напряжения выпрямителя VT1
![]() ,
,
где: Rэкв – эквивалентное сопротивление цепи обмоток статора;
Uс – напряжение питания выпрямителя.
Р β1>β2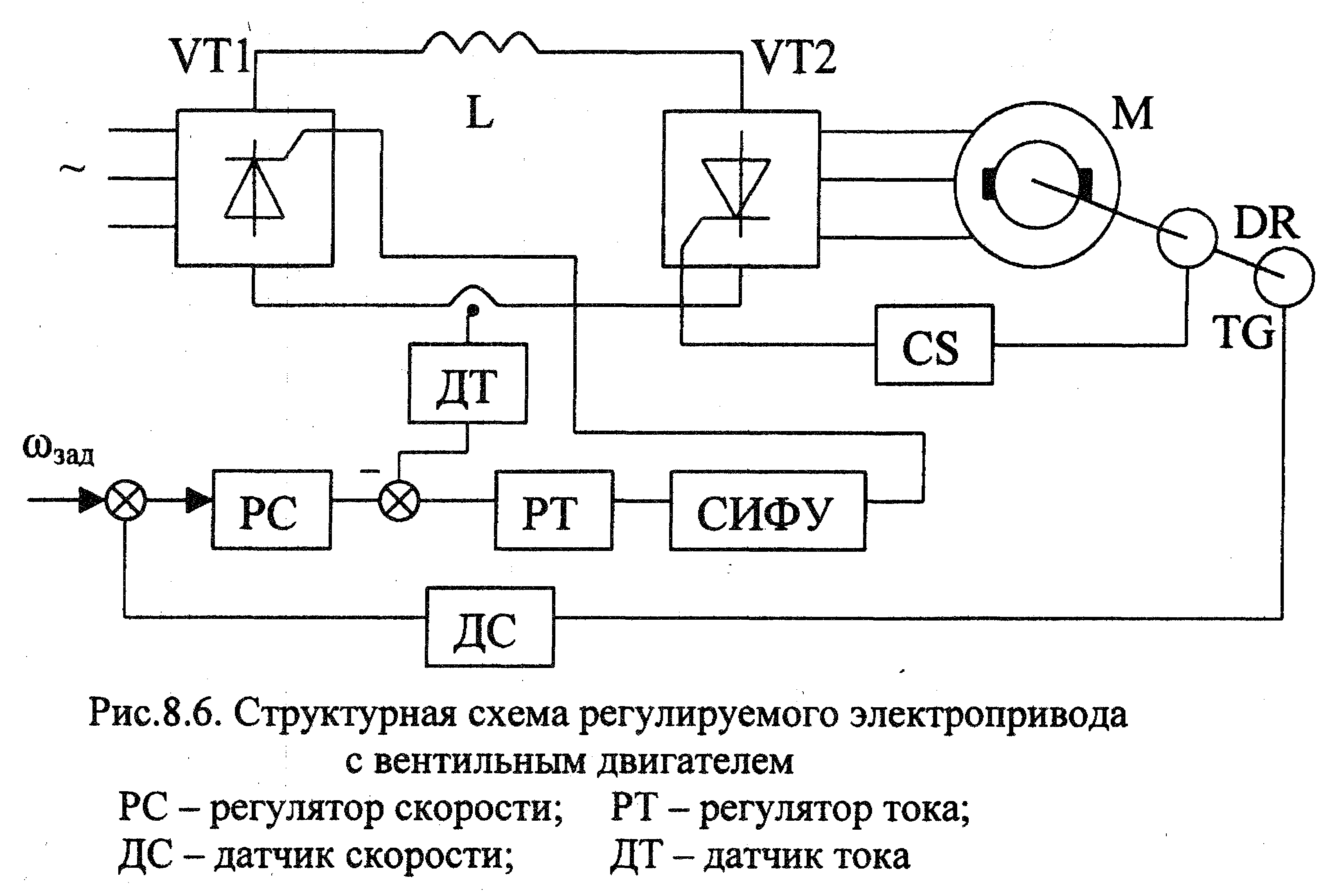
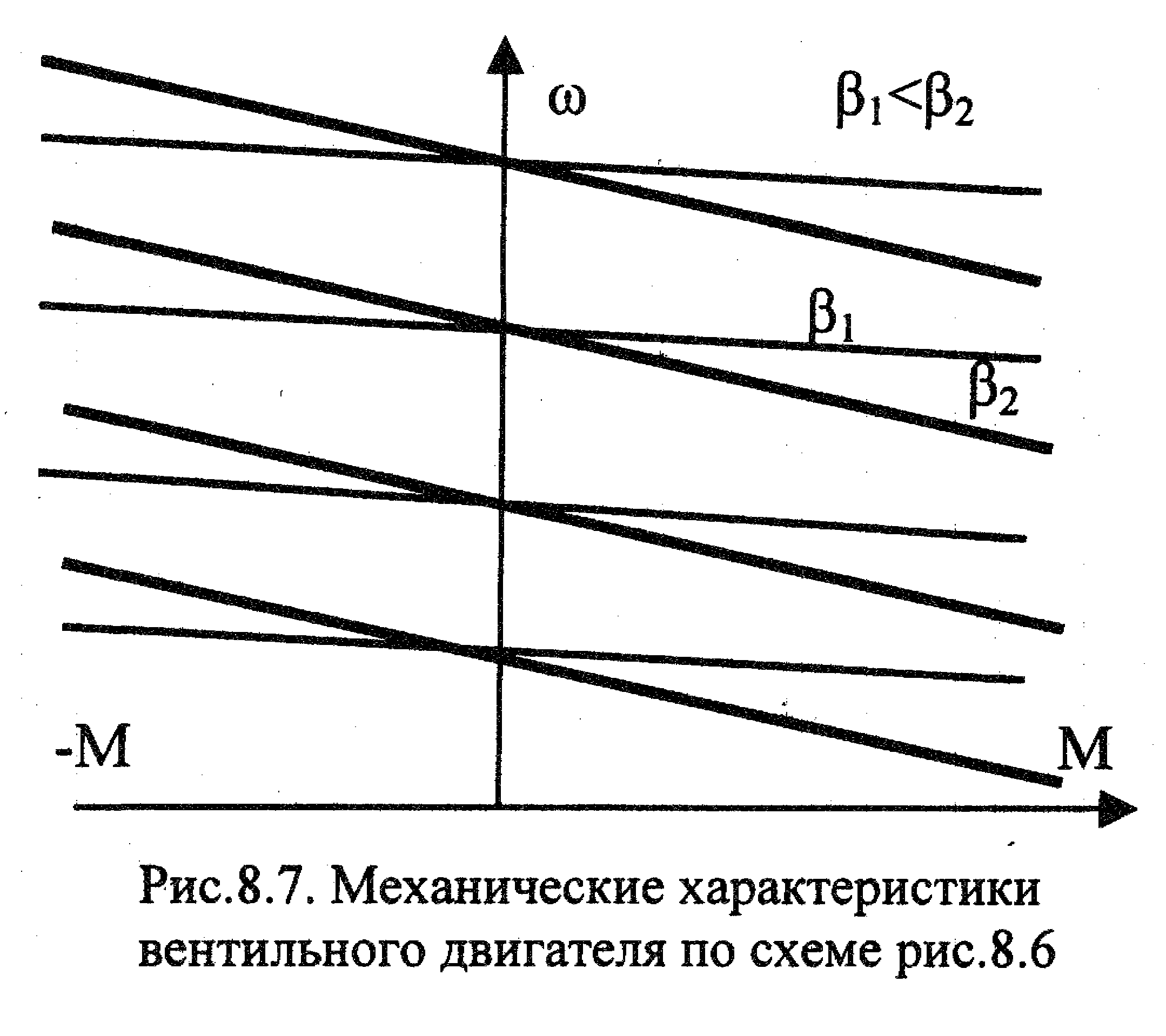
Поскольку в данной
схеме входной выпря-митель принят
управ-ляемым, то возможен режим
рекуперативного торможения, когда
э.д.с. двигателя
![]() .
.
Определенным недостатком рассматриваемой схемы является усложнение коммутации тиристоров инвертора при малых скоростях (ниже 0,1ωн), т.к. при этом э.д.с. двигателя становится недостаточной для естественной коммутации вентилей зависимого инвертора. В этом случае, при пуске двигателя до скорости 0,1ωн для коммутации вентилей инвертора приходится прерывать ток, запирая тиристоры выпрямителя, что усложняет схему его управления.
В последние годы с появлением запираемых тиристоров стали применять схемы с принудительной коммутацией вентилей инвертора, что повышает регулировочные свойства вентильного двигателя и дает возможность его использования для динамичных электроприводов с широким диапазоном регулирования скорости.
Глава 9. Способы регулирования асинхронного двигателя
9.1. Классификация способов регулирования асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения (см.гл.4). Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см.рис.9.1). Как следует из (4.6 и 4.7), скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s: