

ТАУ (курс 3, сессия 1)_МГОУ / Учебник тау / Глава 11
.docТаким образом, энергия скольжения, индуктируемая в обмотках ротора, преобразуется в энергию постоянного тока и инвертируется (отдается) в питающую сеть. Благодаря такому последовательному преобразованию энергии эти системы получили название «каскадов». Энергетическая диаграмма, характеризующая преобразование энергии в каскадной схеме, показана на рис.11.2.
М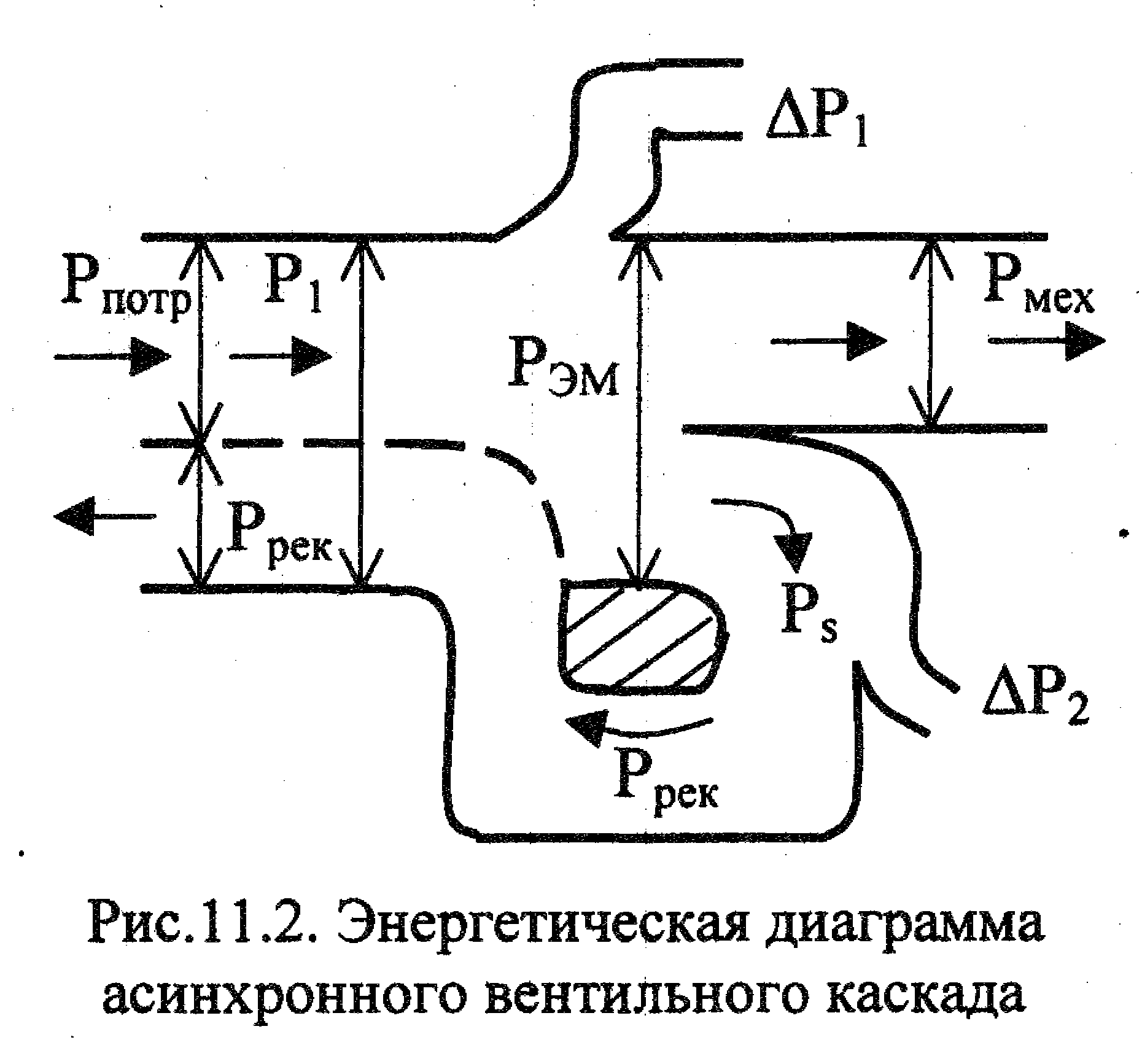 ощность
Р1,
забираемая по цепи статора двигателя
из сети, за вычетом потерь в статоре
∆Р1,
преобразуется в мощность вращающегося
магнитного поля – электромагнитную
мощность Рэм.
Последняя разделяется на две части:
механическую Рмех,
реализуемую на валу асинхронного
двигателя, и электрическую, трансформируемую
в обмотки ротора двигателя – мощность
сколь-жения РS.
Мощность скольжения, за вычетом потерь
в роторе двигателя, выпрямителе, инверторе
и трансформаторе инвертора, возвращается
в питающую сеть – Ррек.
Таким образом, результирующая, потребляемая
приводом из сети мощность Рпотр
будет равна разности Р1-Ррек.
Это определяет высокий кпд вентильного
каскада.
ощность
Р1,
забираемая по цепи статора двигателя
из сети, за вычетом потерь в статоре
∆Р1,
преобразуется в мощность вращающегося
магнитного поля – электромагнитную
мощность Рэм.
Последняя разделяется на две части:
механическую Рмех,
реализуемую на валу асинхронного
двигателя, и электрическую, трансформируемую
в обмотки ротора двигателя – мощность
сколь-жения РS.
Мощность скольжения, за вычетом потерь
в роторе двигателя, выпрямителе, инверторе
и трансформаторе инвертора, возвращается
в питающую сеть – Ррек.
Таким образом, результирующая, потребляемая
приводом из сети мощность Рпотр
будет равна разности Р1-Ррек.
Это определяет высокий кпд вентильного
каскада.
Мощность скольжения после выпрямления тока ротора будет
![]() ,
(11.1)
,
(11.1)
где: s – скольжение;
Ерн – номинальная (при s=1) линейная э.д.с. ротора;
Idp – выпрямленный ток ротора;
Ксх=1,35 – коэффициент мостовой схемы выпрямления;
∆Uγ – реактивное падение напряжения, обусловленное коммутацией вентилей выпрямителя;
![]() .
(11.2)
.
(11.2)
Здесь
![]() - индуктивное сопротивление рассеяния
фазы асинхронного двигателя, приведенное
к обмотке ротора.
- индуктивное сопротивление рассеяния
фазы асинхронного двигателя, приведенное
к обмотке ротора.
Подставляя (11.2) в (11.1), получим
 .
.
Момент асинхронного двигателя (см. формулу 4.37) равен
 .
(11.3)
.
(11.3)
В первом приближении (при М≤Мн) можно считать, что момент пропорционален выпрямленному току ротора Id. При больших значениях момента эта пропорциональность нарушается.
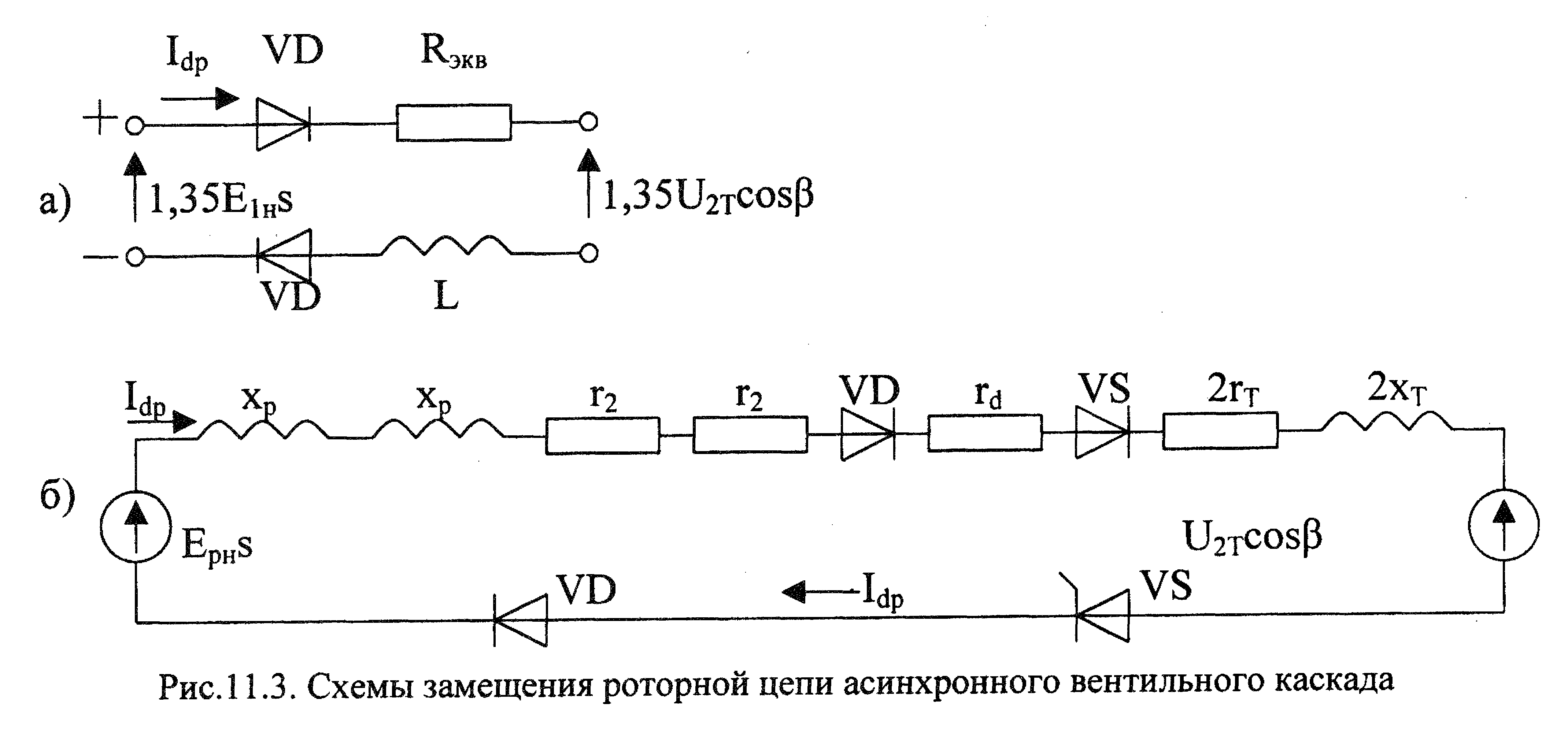
Величина выпрямленного тока ротора определяется разностью выпрямленной э.д.с. ротора Еdp, э.д.с. инвертора Edi и сопротивлением цепи Rэкв (см.рис.11.3а).
![]() ,
(11.4)
,
(11.4)
![]() ,
(11.5)
,
(11.5)
где: U2Т – линейное напряжение вторичной обмотки трансформатора;
β
– угол регулирования вентилей инвертора
![]() ;
;
![]() .
.
Здесь r2 – активное сопротивление обмотки ротора;
r2Т – активное сопротивление вторичной обмотки трансформатора;
rd – активное сопротивление сглаживающего дросселя L;
![]() - эквивалентное
сопротивление, вызванное коммутацией
вентилей выпрямителя;
- эквивалентное
сопротивление, вызванное коммутацией
вентилей выпрямителя;
![]() - эквивалентное
сопротивление, вызванное коммутацией
вентилей инвертора;
- эквивалентное
сопротивление, вызванное коммутацией
вентилей инвертора;
хТ – сопротивление фазы трансформатора, приведенное ко вторичной обмотке.
Регулируя величину угла управления вентилей инвертора, можно регулировать величину тока ротора Idp и, следовательно, момента асинхронного двигателя.
Если
![]() ,
то ток ротора и момент будут равны нулю.
Скольжение, соответствующее этому
условию, s0
будет скольжением холостого хода
двигателя в схеме вентильного каскада
,
то ток ротора и момент будут равны нулю.
Скольжение, соответствующее этому
условию, s0
будет скольжением холостого хода
двигателя в схеме вентильного каскада
![]() .
(11.6)
.
(11.6)
Таким образом, изменяя угол управления β можно регулировать скорость холостого хода двигателя.
Максимальная
величина скольжения холостого хода
определяется максимальным значением
противоэ.д.с. инвертора, которая будет
при
![]() .
.
![]() .
(11.6)
.
(11.6)
Преобразовав уравнение (11.4) с учетом (11.5), получим:
![]() .
(11.7)
.
(11.7)
Решая совместно уравнения (11.3) и (11.7), получим выражение для механических характеристик вентильного каскада
![]() (11.8)
(11.8)
или, обозначая
![]() и
и
![]() ,
получим:
,
получим:
![]() .
(11.9)
.
(11.9)
Здесь
![]() .
.
М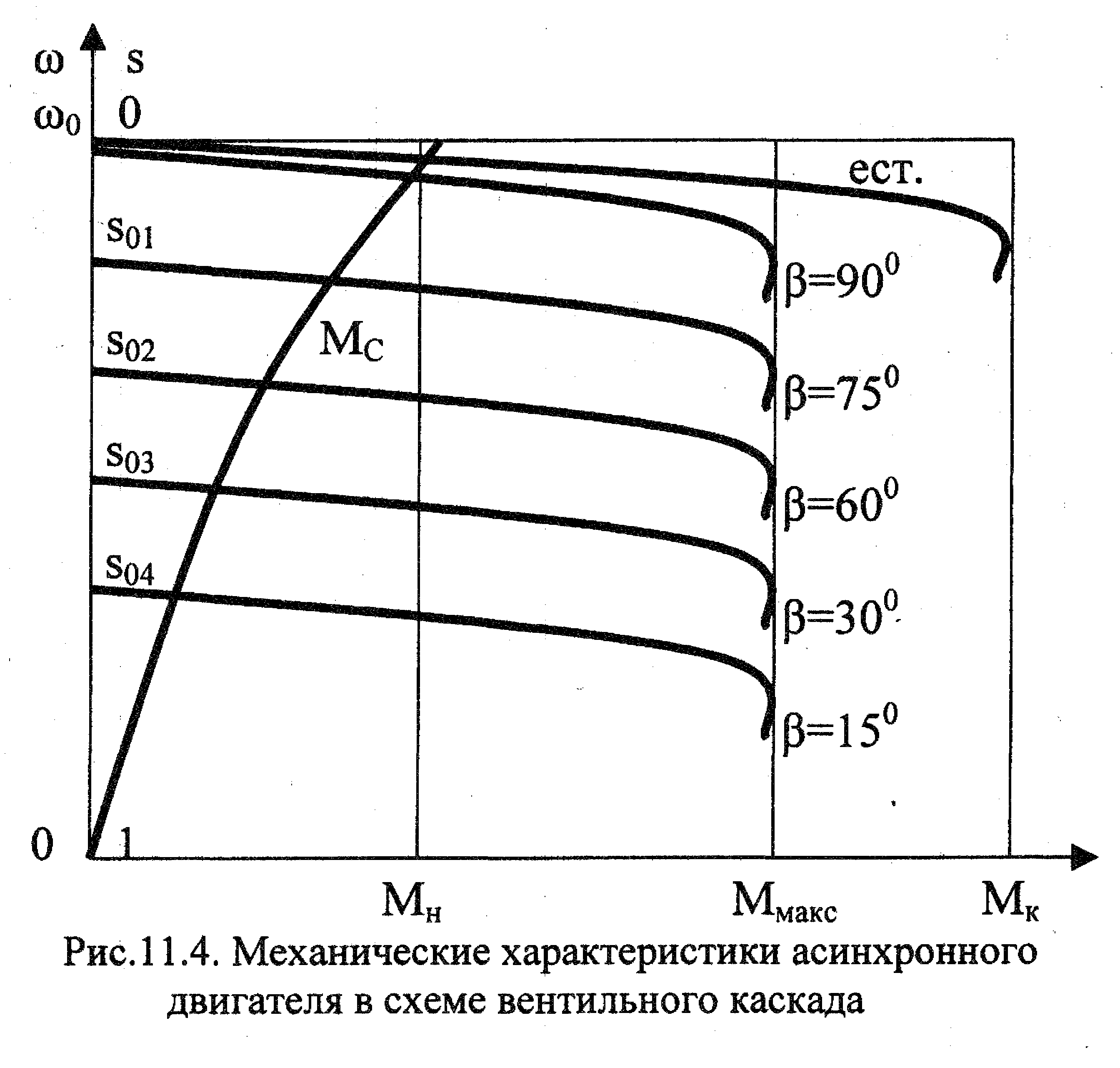 еханические
характеристики вентильного каскада
приведены на рис.11.4.
еханические
характеристики вентильного каскада
приведены на рис.11.4.
Механические ха-рактеристики имеют сравнительно высо-кую жесткость (при-мерно в 2 раза мень-ше, чем естественная механическая харак-теристика асинхрон-ного двигателя) и перемещаются па-раллельно друг дру-гу вдоль оси ординат по мере увеличения противоэ.д.с. инвер-тора Edi (по мере уменьшения угла уп-равления β). Уравнения (11.8) и (11.9) позволяют рассчитать механические характеристики при значениях момента до 0,72Мк. Вследствие того, что ток ротора несинусоидален, критический момент двигателя в схеме каскада не достигается и максимальный момент составляет Ммакс=0,83Мк, т.е. перегрузочная способность асинхронного двигателя в схеме каскада снижается на 17%.
Принцип регулирования скорости в рассматриваемой схеме следующий. Если установить угол управления β=900, то противоэ.д.с. инвертора Edi будет равна нулю. Этому условию соответствует верхняя механическая характеристика. Если при наличии статического момента Мс на валу двигателя уменьшить угол β (например установить β=600), то увеличится противоэ.д.с. инвертора Edi и она станет больше, чем выпрямленная э.д.с. ротора Edp. Тогда ток ротора Idp уменьшится до нуля (в обратную сторону он пойти не может из-за односторонней проводимости выпрямителя). Момент двигателя станет равным нулю, и под действием статического момента скорость двигателя будет уменьшаться и, следовательно, возрастать скольжение. По мере роста скольжения увеличивается э.д.с. ротора. Когда скольжение станет больше s02 (для рассматриваемого примера), по цепи ротора пойдет ток, и двигатель перейдет на работу на механической характеристике, соответствующей s02. Скорость двигателя будет определяться точкой пересечения линии статического момента с данной механической характеристикой. Для дальнейшего снижения скорости нужно еще более увеличить противоэ.д.с. инвертора, т.е. уменьшить угол β.
Для увеличения скорости уменьшают противоэ.д.с. инвертора Edi, ток ротора возрастает, момент увеличивается, и двигатель разгоняется. По мере увеличения скорости уменьшается выпрямленная э.д.с. ротора. Разгон двигателя будет происходить до тех пор, пока в соответствии с формулой (11.7) ток не уменьшится до значения, соответствующего статическому моменту.
Глубина возможного регулирования скорости определяется относительным значением напряжения трансформатора U2Т, от величины которого зависит максимальное скольжение s0макс (см.формулу 11.6). Это обстоятельство определяет целесообразность применения вентильных каскадов для привода механизмов с вентиляторным характером нагрузки (насосов, вентиляторов и др.), для которых не требуется, как правило, снижение скорости ниже 50% от номинальной. Тогда трансформатор и инвертор могут иметь мощность в 2 раза меньше, чем мощность асинхронного двигателя, что уменьшает стоимость электропривода.
Ориентировочно требуемая мощность трансформатора инвертора определяется соотношением
![]() ,
,
т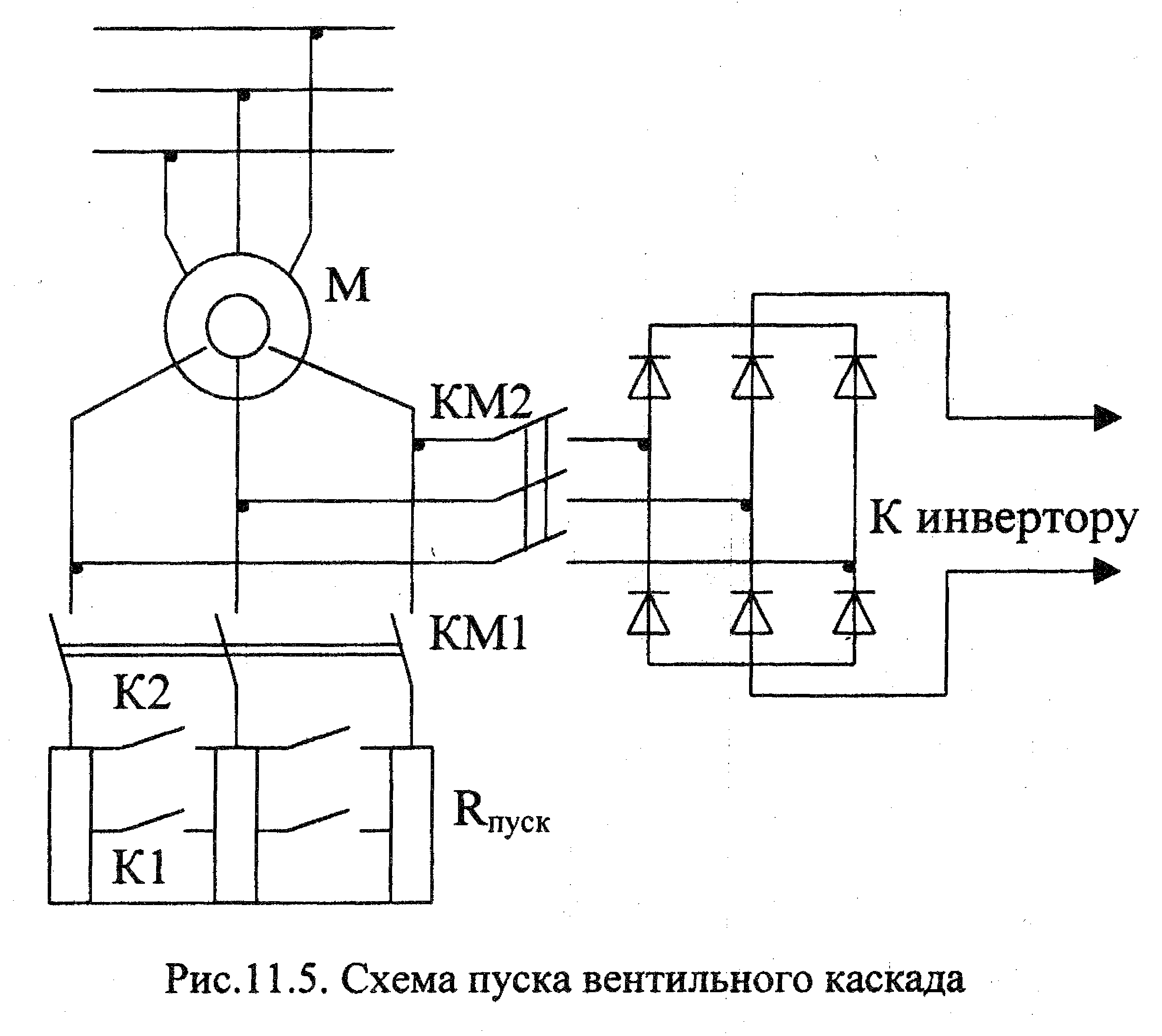 .е.
составляет часть мощности двигателя,
пропорциональную максимальному
скольжению.
.е.
составляет часть мощности двигателя,
пропорциональную максимальному
скольжению.
В случае регули-рования в схеме кас-када в неполном диа-пазоне скорости воз-никает задача пуска двигателя до нижней рабочей скорости в схеме каскада. Обыч-но в этом случае ис-пользуется схема ре-остатного пуска.
Одна из возмож-ных схем показана на рис.11.5. В этой схе-ме двигатель разгоняется при включенном контакторе КМ1 и отключенном КМ2 по схеме реостатного пуска. По достижении определенной скорости выше, чем ω0(1-s0макс), включается контактор КМ2 и затем отключается КМ1, и двигатель переходит на работу в схеме вентильного каскада.
11.2. Двигатели двойного питания
В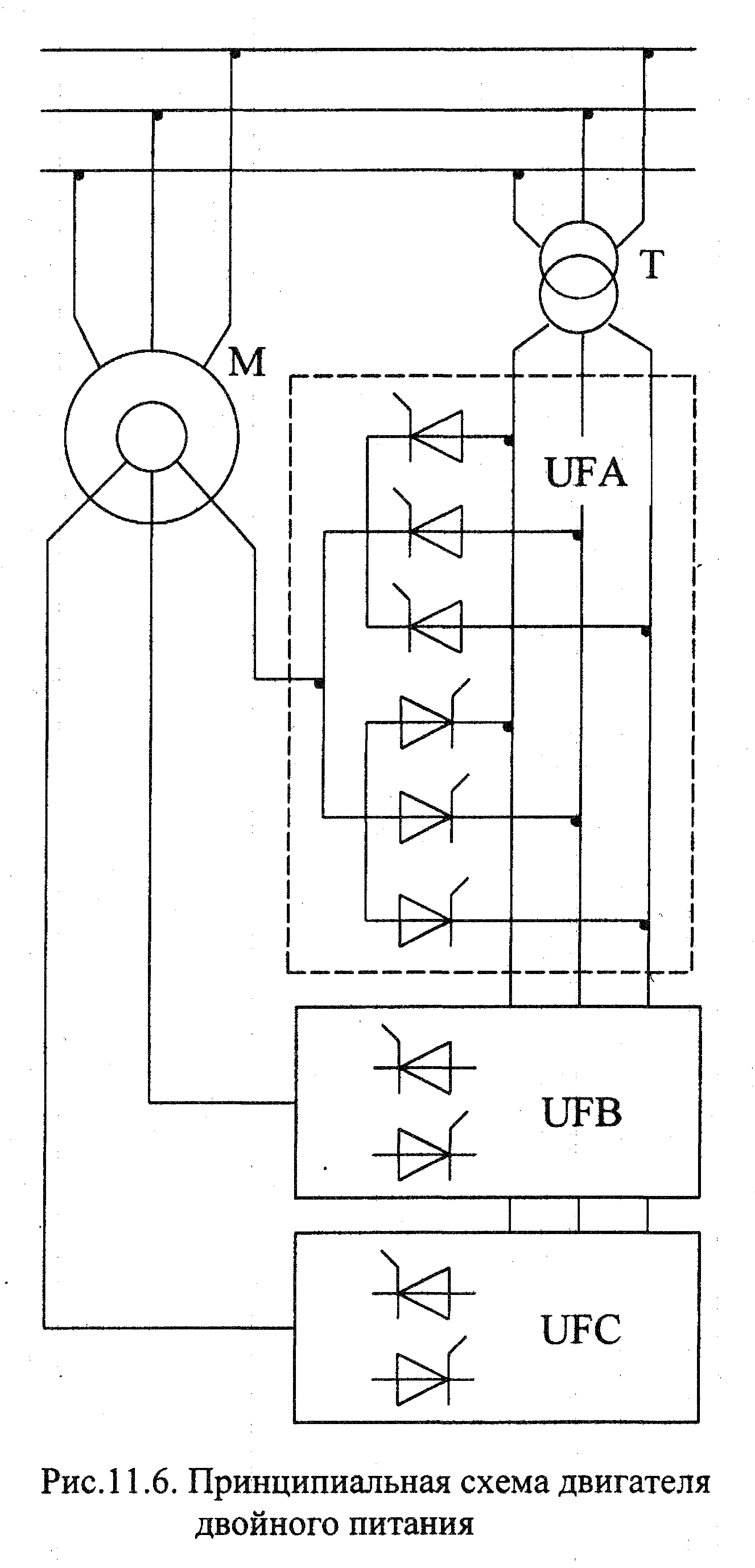 отличие от схем вентиль-ного каскада,
где поток энергии скольжения направлен
только в одну сторону – от ротора
двигателя к инвертору и далее в питающую
сеть, в схемах дви-гателя двойного
питания в цепь ротора включается
преобразо-ватель (рис.11.6), обеспечиваю-щий
двухсторонний обмен энергией, как от
ротора дви-гателя в питающую сеть, так
и от сети в обмотки ротора асин-хронного
двигателя. Таким пре-образователем
является преоб-разователь частоты с
непос-редственной связью, рассмотренный
в §10.3. При этом доба-вочная э.д.с., вводимая
в цепь ротора, может быть направлена
как против э.д.с. ротора, согласно с ней
или под некоторым углом (π-δ).
В общем случае
отличие от схем вентиль-ного каскада,
где поток энергии скольжения направлен
только в одну сторону – от ротора
двигателя к инвертору и далее в питающую
сеть, в схемах дви-гателя двойного
питания в цепь ротора включается
преобразо-ватель (рис.11.6), обеспечиваю-щий
двухсторонний обмен энергией, как от
ротора дви-гателя в питающую сеть, так
и от сети в обмотки ротора асин-хронного
двигателя. Таким пре-образователем
является преоб-разователь частоты с
непос-редственной связью, рассмотренный
в §10.3. При этом доба-вочная э.д.с., вводимая
в цепь ротора, может быть направлена
как против э.д.с. ротора, согласно с ней
или под некоторым углом (π-δ).
В общем случае
![]() .
.
Ток
ротора будет опреде-ляться из уравнения
равновесия напряжений в контуре
ротора![]() .
(11.10)
.
(11.10)
Активная и реактивная составляющие тока ротора будут равны:
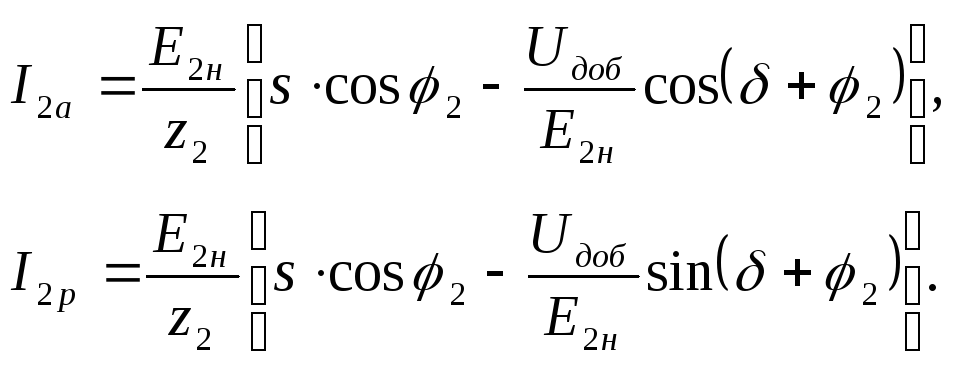 (11.11)
(11.11)
В этих формулах: Е2, Е2н – текущая и номинальная (при s=1) э.д.с. ротора;
![]() .
.
Активная составляющая тока ротора определяет момент двигателя М и механическую мощность двигателя
![]() .
(11.12)
.
(11.12)
Реактивная составляющая тока ротора определяет реактивную мощность, циркулирующую в статорной и роторной цепях двигателя
![]() .
(11.13)
.
(11.13)
Равенства (11.11) и
(11.13) показывают, что регулируя величину
и фазу добавочного напряжения
![]() ,
вводимого в цепь ротора, можно управлять
активной и реактивной мощностями
двигателя. Из этого положения также
следует, что при соответствующих
значениях U2
и δ
активная составляющая тока ротора может
быть отрицательна при положительных
скольжениях s>0
и положительна при отрицательных
скольжениях s<0.
Это означает, что в системе двойного
питания асинхронный двигатель может
работать в несвойственных ему в обычных
схемах включения режимах: генераторном
при скорости ниже синхронной и двигательном
при скорости выше синхронной. Энергетические
диаграммы для указанных режимов приведены
на рис.11.7.
,
вводимого в цепь ротора, можно управлять
активной и реактивной мощностями
двигателя. Из этого положения также
следует, что при соответствующих
значениях U2
и δ
активная составляющая тока ротора может
быть отрицательна при положительных
скольжениях s>0
и положительна при отрицательных
скольжениях s<0.
Это означает, что в системе двойного
питания асинхронный двигатель может
работать в несвойственных ему в обычных
схемах включения режимах: генераторном
при скорости ниже синхронной и двигательном
при скорости выше синхронной. Энергетические
диаграммы для указанных режимов приведены
на рис.11.7.
Направление потока
энергии в режиме генераторного торможения
при скорости ниже синхронной противоположно
тому, какое было в двигательном режиме
(см.рис.11.2). Мощность торможения Рмех
(см.11.12) в
рассматриваемом случае недостаточна
для создания электромагнитной мощности
Рэм,
поэтому из сети через трансформатор и
роторный преобразователь забирается
и направляется в ротор двигателя
недостающая мощность, пропорциональная
скольжению
![]() .
Сумма механической мощности, поступающей
с вала, и мощность скольжения
.
Сумма механической мощности, поступающей
с вала, и мощность скольжения
![]()
образует
электромагнитную мощность, которая
рекуперируется в питающую сеть. Отдаваемая
в сеть мощность равна разности
рекуперируемой мощности, отдаваемой
по цепи статора, и мощности, забираемой
со стороны трансформатора
![]() .
.
В двигательном режиме при скорости выше синхронной (рис.11.7б) в роторную цепь двигателя добавляется мощность скольжения, забираемая из сети со стороны трансформатора. Она складывается с электромагнитной мощностью, поступающей в двигатель со стороны статора. Сумма этих мощностей преобразуется в механическую мощность на валу двигателя, обеспечивая работу двигателя с моментом М при скорости выше синхронной
![]() .
.
З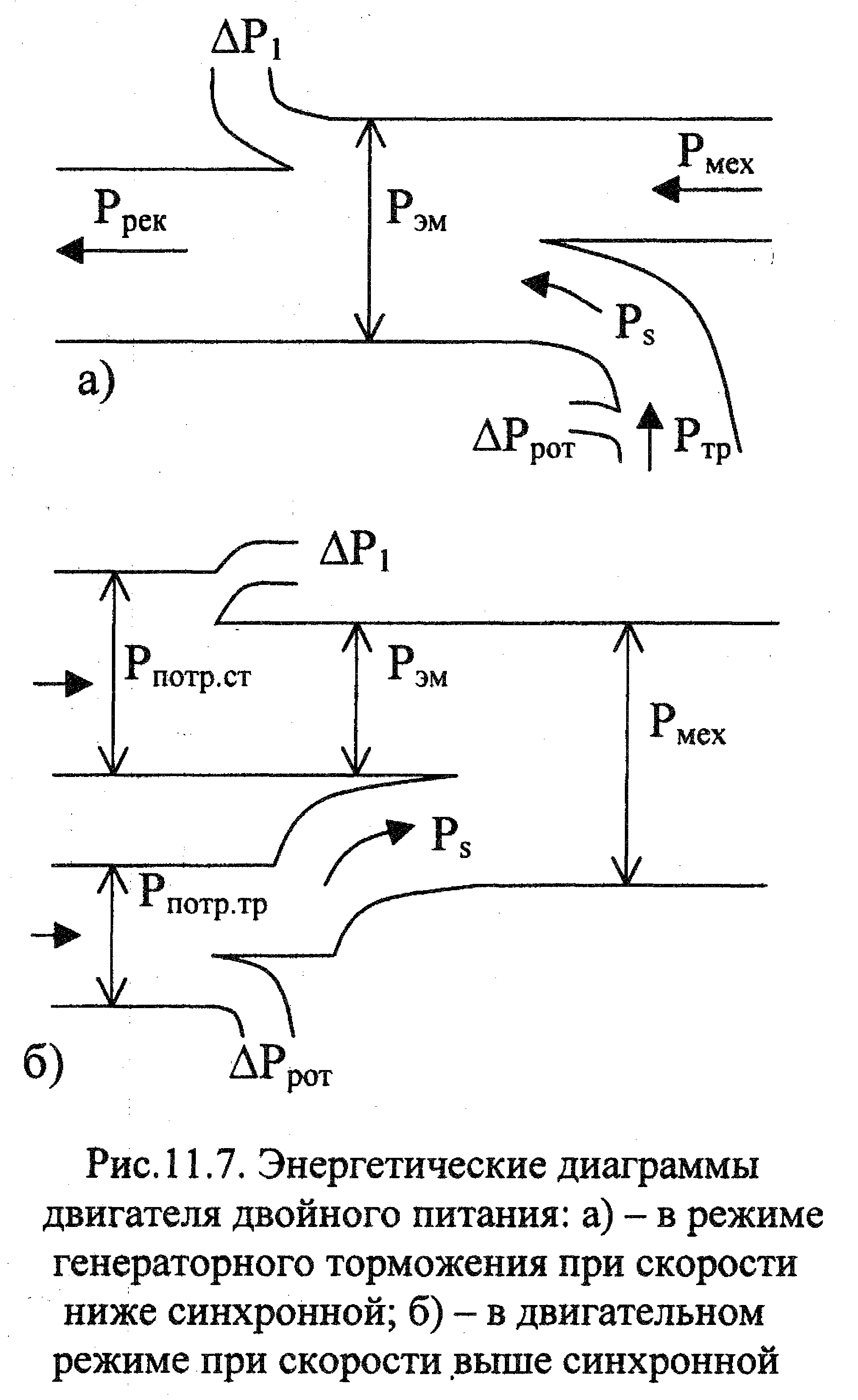 аметим,
что, несмотря на то, что скольжение в
этом случае отрицательно, двигатель
разви-вает двигательный момент.
аметим,
что, несмотря на то, что скольжение в
этом случае отрицательно, двигатель
разви-вает двигательный момент.
В обоих рассматриваемых режимах преобразователь частоты работает таким образом, что энергия от трансформатора поступает в ротор двигателя, т.е. двигатель питается как со стороны статора, так и ротора.
Поскольку частота
f2
э.д.с. и тока ротора определяется
сколь-жением двигателя
![]() ,
то и частота добавочной э.д.с. Uдоб,
вводимой в цепь ротора, должна совпадать
с частотой э.д.с. рото-ра и изменяться
при изменении скольжения двигателя.
,
то и частота добавочной э.д.с. Uдоб,
вводимой в цепь ротора, должна совпадать
с частотой э.д.с. рото-ра и изменяться
при изменении скольжения двигателя.
Максимально возможный диапазон регулирования скорости вниз и вверх от синхронной определяется двумя параметрами - возможными максимальными значениями частоты f2 и напряжения U2макс на выходе преобразователя частоты, служащего для питания цепи ротора. Максимальный диапазон регулирования скорости будет равен
![]() .
.
Абсолютное значение максимального скольжения равно
![]() .
.
Т ак
как преобразователь частоты с
непосредственной связью, как правило,
обеспечивает регулирование частоты в
пределах 20Гц (при частоте питания 50Гц),
чему соответствует максимальное
скольжение
ак
как преобразователь частоты с
непосредственной связью, как правило,
обеспечивает регулирование частоты в
пределах 20Гц (при частоте питания 50Гц),
чему соответствует максимальное
скольжение
![]() ,
то максимальный диапазон регулирования
скорости двигателя двойного питания
будет равен
,
то максимальный диапазон регулирования
скорости двигателя двойного питания
будет равен
![]() .
.
Регулирование
скорости в схеме двигателя двойного
питания производится из-менением
величины и зна-ка относительного
значе-ния добавочной э.д.с.
![]() ,
при этом час-тота на выходе преоб-разователя
автоматически поддерживается равной
частоте тока ротора. Ме-ханические
характерис-тики двигателя двойного
питания при ε=0,2
приведены на рис.11.8. Пуск двигателя до
значения минимальной рабочей скорости
производится так же, как и в схемах
вентильного каскада (см.рис.11.5).
,
при этом час-тота на выходе преоб-разователя
автоматически поддерживается равной
частоте тока ротора. Ме-ханические
характерис-тики двигателя двойного
питания при ε=0,2
приведены на рис.11.8. Пуск двигателя до
значения минимальной рабочей скорости
производится так же, как и в схемах
вентильного каскада (см.рис.11.5).
Основным достоинством схем вентильного каскада и двигателей двойного питания является высокий кпд, сохраняющийся при регулировании скорости в заданном диапазоне. Поскольку эти системы регулируемого асинхронного привода имеют ограниченный диапазон регулирования, как правило, не выше 2:1, то эти системы применяются, главным образом, для привода мощных (выше 500кВт) турбомеханизмов: вентиляторов, центробежных насосов и других машин.