

ТАУ (курс 3, сессия 1)_МГОУ / Учебник тау / Глава 10
.docрость вращения электромагнитного поля статора пропорциональна частоте питающего напряжения
![]() .
(10.1)
.
(10.1)
Следует также учесть, что поскольку с изменением частоты питающего напряжения изменяется и величина потока двигателя Ф1,
![]() ,
(10.2)
,
(10.2)
то в большинстве случаев одновременно с изменением частоты питающего напряжения необходимо регулировать и его величину, причем регулирование напряжения следует производить таким образом, чтобы скольжение двигателя было минимальным.
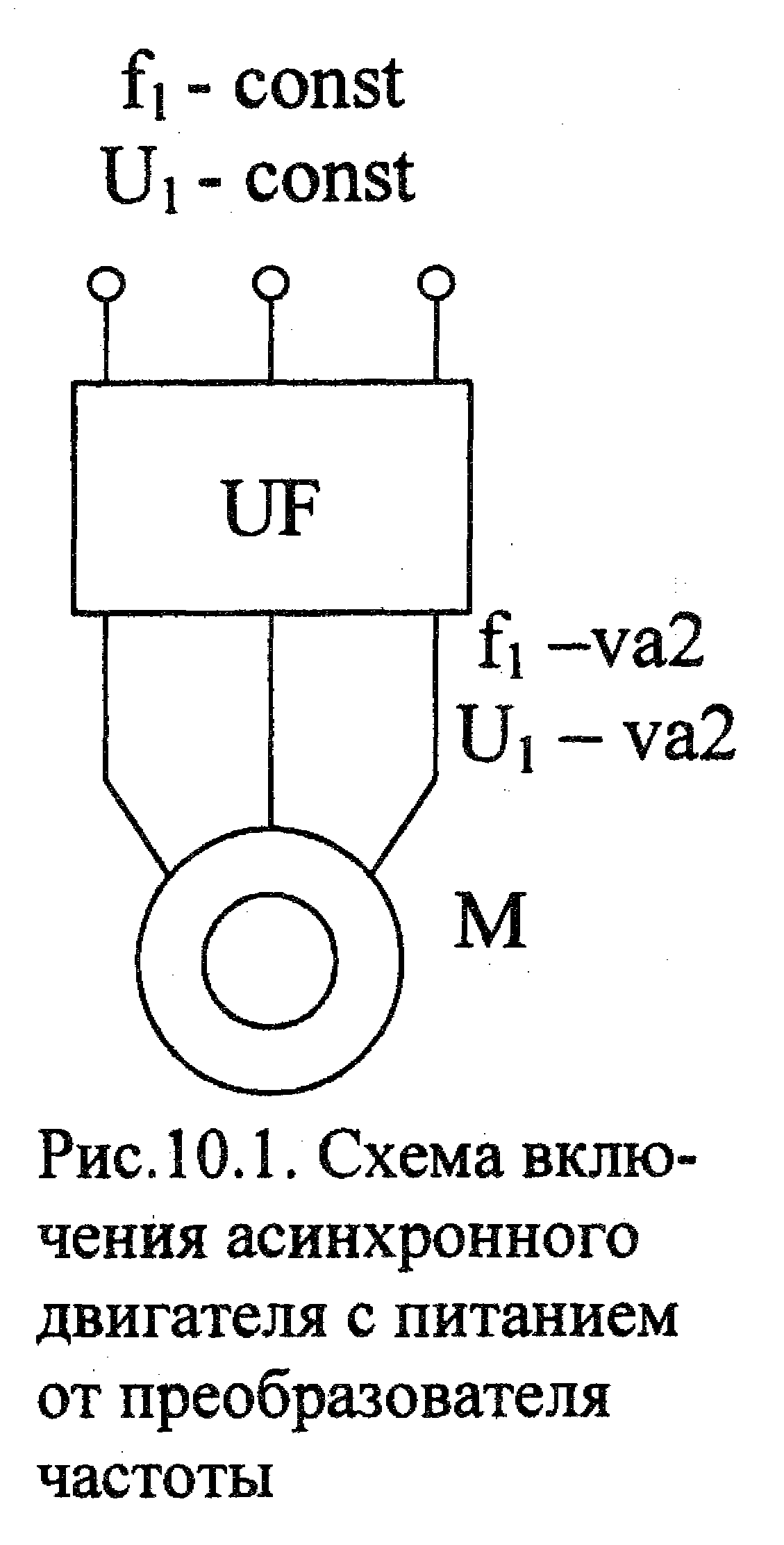
Для реализации способа частотного регулирования асинхронный короткозамкнутый двигатель включается в питающую сеть через преобразователь частоты UF (см.рис.10.1). В качестве преобразователей частоты в настоящее время используются, в основном, полупроводниковые преобразователи частоты.
При
частотном регулировании величина
относительного скольжения sj
зависит как от разности скоростей
вращающегося электромагнитного поля
и ротора – абсолютного скольжения
![]() ,
так и от относительного значения частоты
питающего напряжения
,
так и от относительного значения частоты
питающего напряжения
 ,
(10.2)
,
(10.2)
![]() .
(10.3)
.
(10.3)
Здесь f1j, ω0j, sj – регулируемые значения частоты напряжения статора и соответствующие значения скорости вращения поля и скольжения;
f1н и ω0н – номинальные значения частоты статора и скорости поля, соответствующие паспортным данным двигателя.
С учетом (10.1)
 .
(10.4)
.
(10.4)
Для анализа электромеханических характеристик двигателя при частотном регулировании рассмотрим Т-образную схему замещения двигателя (рис.10.2). В отличие от ранее приведенной на рис.4.4а схемы замещения в данном случае приходится учитывать, что реактивные сопротивления двигателя зависят от частоты питающего напряжения и изменяются с изменением частоты.
 (10.5)
(10.5)
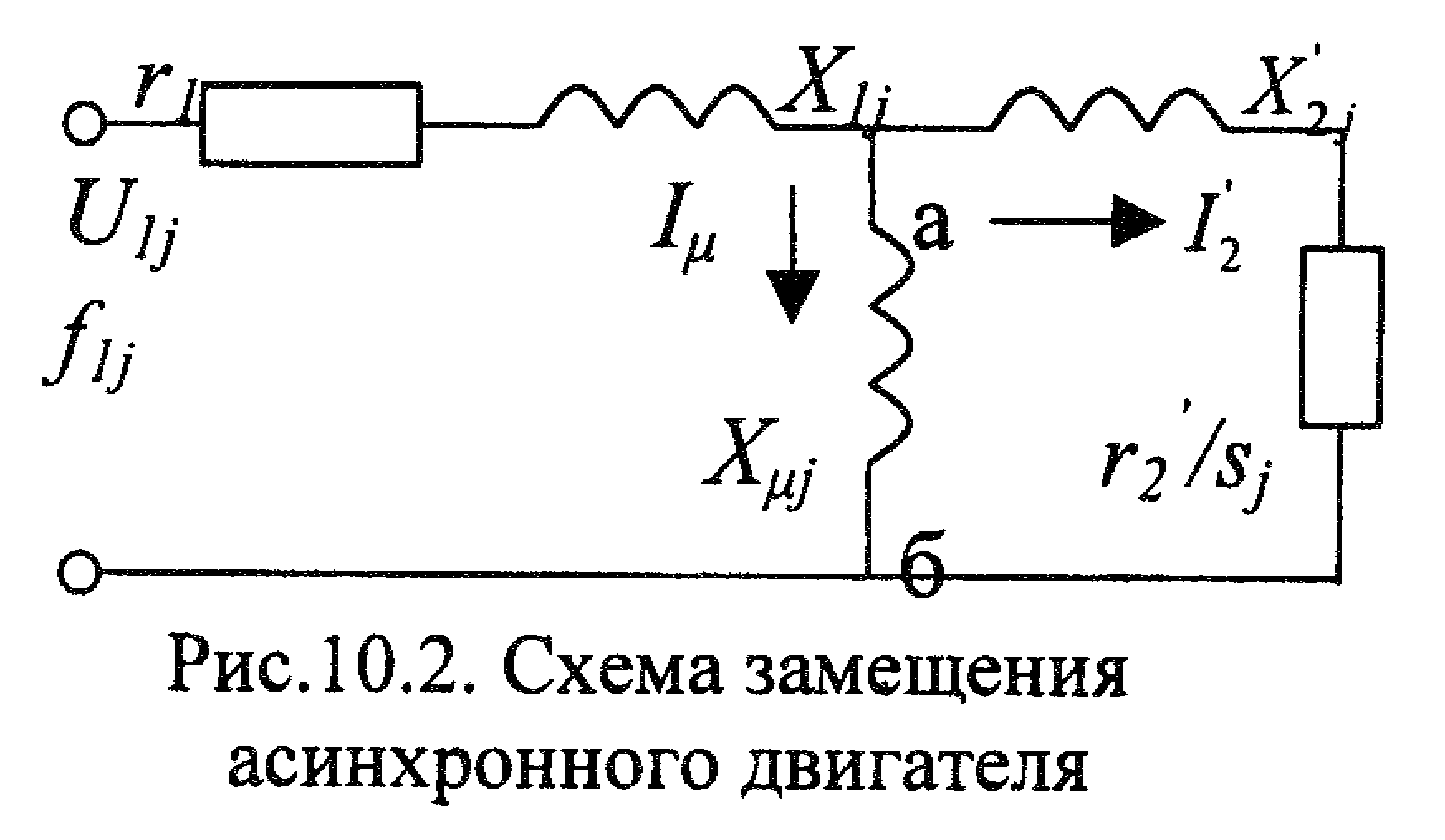 В
связи с этим нужно за-метить, что
номинальной час-тоте 50Гц индуктивное
соп-ротивление контура намаг-ничивания
хμн
на порядок
(для машин малой мощности) или на два
порядка (для машин большой мощности)
больше, чем активное сопротивление
обмотки статора r1.
Поэтому при анализе и расчете
электромеханических характеристик
асинхронных двигателей, работающих при
постоянной номинальной частоте питающего
напряжения, сопротивлением r1
обычно
пренебрегают (см.§4.2). Если же двигатель
работает с переменной частотой напряжения,
то при снижении частоты сопротивление
r1
становится соизмеримым с реактивными
сопротивлениями машины, и учет
сопротивления r1
является необходимым.
В
связи с этим нужно за-метить, что
номинальной час-тоте 50Гц индуктивное
соп-ротивление контура намаг-ничивания
хμн
на порядок
(для машин малой мощности) или на два
порядка (для машин большой мощности)
больше, чем активное сопротивление
обмотки статора r1.
Поэтому при анализе и расчете
электромеханических характеристик
асинхронных двигателей, работающих при
постоянной номинальной частоте питающего
напряжения, сопротивлением r1
обычно
пренебрегают (см.§4.2). Если же двигатель
работает с переменной частотой напряжения,
то при снижении частоты сопротивление
r1
становится соизмеримым с реактивными
сопротивлениями машины, и учет
сопротивления r1
является необходимым.
Мощность скольжения, выделяемая в цепи ротора, определяется формулой (4.37) и расходуется на нагрев обмоток ротора.
![]() ,
откуда
,
откуда
![]() .
(10.6)
.
(10.6)
Из
схемы замещения определим значение
![]() [1-3]
[1-3]
 .
(10.7)
.
(10.7)
Если
учесть, что отношения
![]() и
и
![]() гораздо меньше единицы и ими можно
пренебречь, то выражение (10.7) можно
упростить:
гораздо меньше единицы и ими можно
пренебречь, то выражение (10.7) можно
упростить:
 .
(10.8)
.
(10.8)
Подставив (10.8) в (10.6) получим формулу для механических характеристик при переменных значениях величины и частоты напряжения питания
 . (10.9)
. (10.9)
Заметим,
что если положить
![]() и
и
![]() ,
то формула (10.9) станет идентичной формуле
(4.21) для механических характеристик
нерегулируемого по частоте асинхронного
двигателя.
,
то формула (10.9) станет идентичной формуле
(4.21) для механических характеристик
нерегулируемого по частоте асинхронного
двигателя.
Положив
![]() ,
найдем значения критического момента
и критического скольжения
,
найдем значения критического момента
и критического скольжения
 ,
(10.10)
,
(10.10)
 .
(10.11)
.
(10.11)
Знак (+) соответствует двигательному режиму, знак (-) – режиму рекуперативного торможения.
Анализируя выражение (10.10), можно установить, что, если пренебрегать величиной активного сопротивления статора (r1=0), то, для того чтобы при частотном регулировании (уменьшении частоты вниз от номинальной) сохранять критический момент постоянным, нужно величину напряжения изменять пропорционально изменению частоты.
 ,
(10.12)
,
(10.12)
г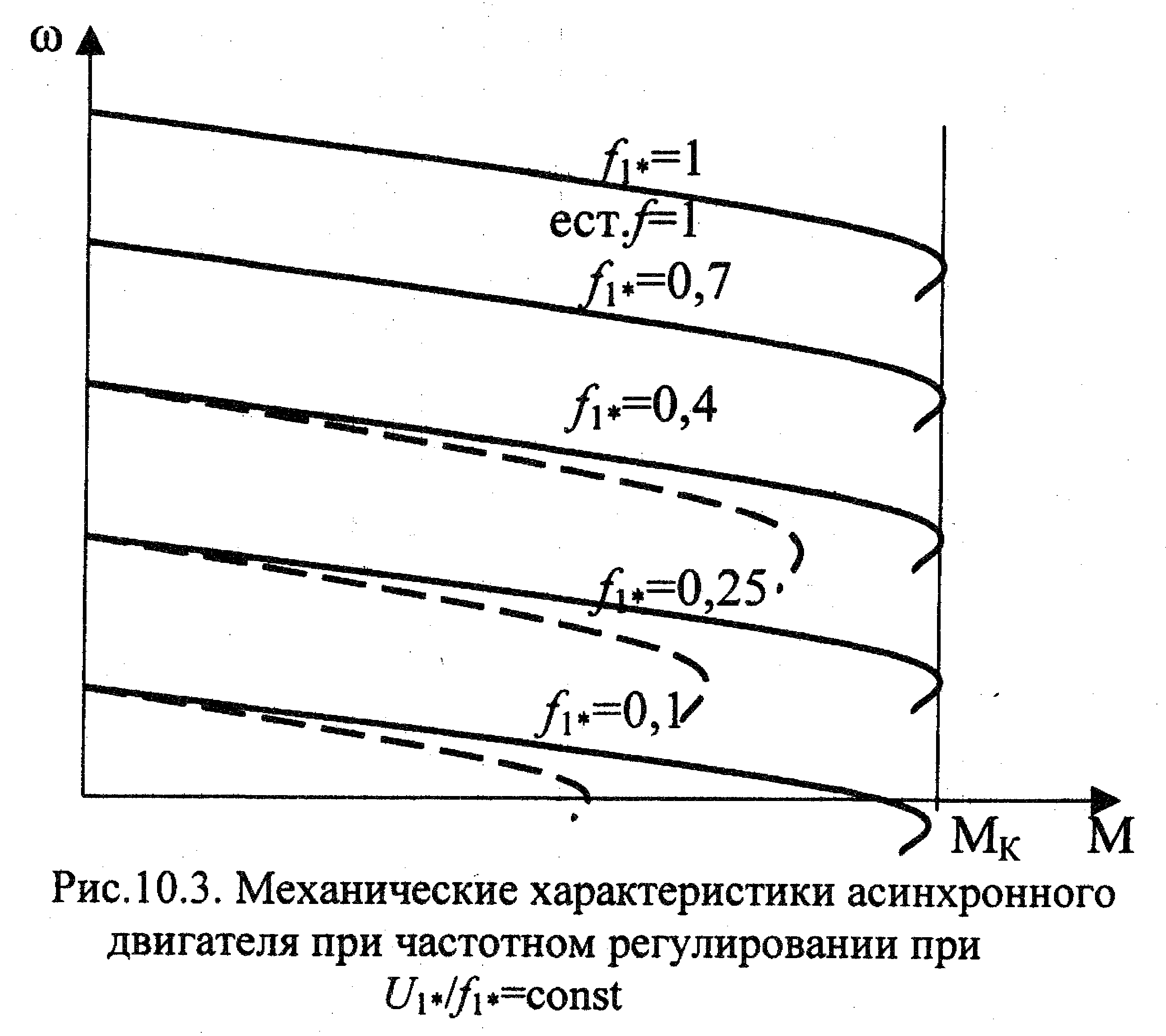 де
де
 .
.
Механические ха-рактеристики, соответст-вующие частотному ре-гулированию при выпол-нении соотношения (10.12) и r1=0, показаны на рис.10.3 (сплошными линиями). В первом приближении пропорци-ональное регулирование напряжения в соответст-вии с соотношением (10.12) обеспечивает ра-боту двигателя с постоянным потоком.
В действительности при малых значениях частоты (f1*<0,3) падение напряжения на сопротивлении r1 существенно снижает величину напряжения, прикладываемого к контуру намагничивания (напряжение Uаб на рис.10.2).
![]() .
.
Падение напряжения на индуктивном сопротивлении х1 уменьшается с уменьшением частоты и поэтому не оказывает такого влияния на напряжение Uаб, как падение напряжения на активном сопротивлении r1, которое не зависит от частоты.
При более точном расчете, учитывая падение напряжения на сопротивлении r1, механические характеристики имеют вид, показанный на рис.10.3 пунктиром. При малых значениях частоты, когда относительное значение падения напряжения на сопротивлении r1 становится значимым, поток двигателя уменьшается и соответственно уменьшается критический момент Мк, что следует также из формулы (10.10).
Поэтому для того чтобы регулировать скорость двигателя, сохраняя критический момент двигателя постоянным, нужно величину напряжения уменьшать в меньшей степени, чем уменьшается частота, примерно в соотношении:
![]() .
(10.13)
.
(10.13)
Т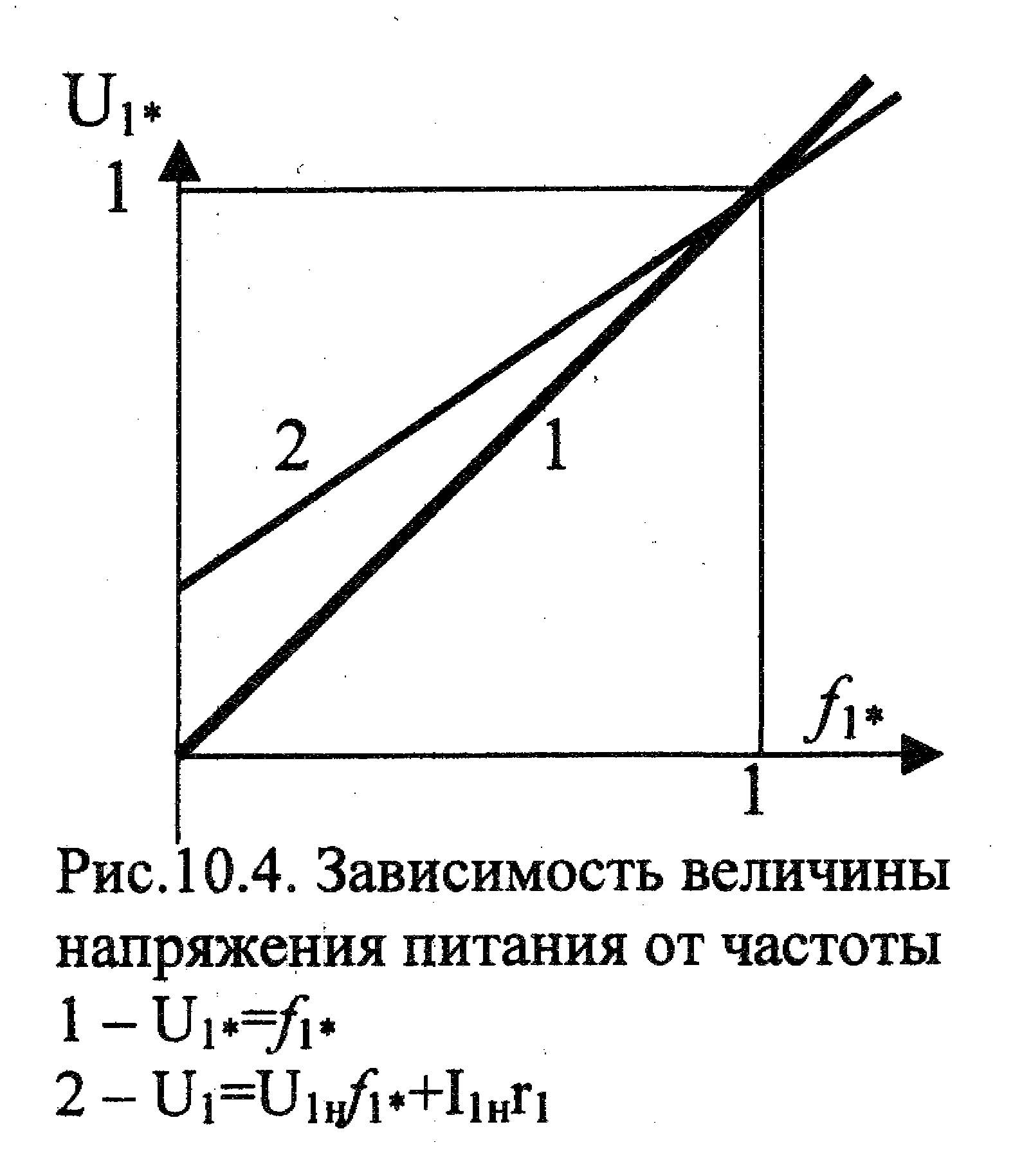 акой
способ регулирова-ния напряжения
называют «пропорциональное регулирование
с I·r
компенсаций». Зависимость
акой
способ регулирова-ния напряжения
называют «пропорциональное регулирование
с I·r
компенсаций». Зависимость
 показана на рис. 10.4. При регулировании
напря-жения в соответствии с соотношением
(10.13) механи-ческие характеристики будут
иметь вид, показанный на рис.10.3 сплошными
линиями.
показана на рис. 10.4. При регулировании
напря-жения в соответствии с соотношением
(10.13) механи-ческие характеристики будут
иметь вид, показанный на рис.10.3 сплошными
линиями.
Следует иметь в виду, что величина I·r компенсации зави-сит от относительной величины r1, которая для двигателей мощ-ностью более 100кВт незна-чительна и ею, как правило, можно пренебрегать; для двигателей мощностью до 15кВт учет r1 обязателен.
В
ряде случаев, в частности, при вентиляторном
характере нагрузки, нет необходимости
при снижении скорости поддерживать
критический момент двигателя равный
номинальному. В этом случае более
целесообразно выдерживать постоянным
соотношение между статическим моментом
и критическим
![]() .
При этом следует пользоваться следующим
соотношением между частотой и напряжением
(формула М.П. Костенко):
.
При этом следует пользоваться следующим
соотношением между частотой и напряжением
(формула М.П. Костенко):
 ,
(10.14)
,
(10.14)
где
 - относительное значение статического
момента при данной частоте (скорости).
- относительное значение статического
момента при данной частоте (скорости).
Так, для привода вентилятора при снижении скорости в 2 раза, статический момент снижается в 4 раза. Тогда, в соответствии с (10.14) при снижении скорости и частоты в 2 раза, напряжение можно уменьшить в 4 раза. При этом сокращаются потери в обмотке статора и магнитопроводе машины.
При стандартной частоте питания 50Гц невозможно получить скорость асинхронного двигателя выше 3000об/мин. Для получения более высокой скорости необходимо питать асинхронный двигатель напряжением с частотой более 50Гц. Для многих механизмов: машины текстильной промышленности, шлифовальные станки, центрифуги и другие, - необходимы скорости рабочего органа 6000, 9000, 1200об/мин и более. В этом случае применяют преобразователи частоты с выходной частотой более 50Гц. Однако повышение напряжения выше стандартного, как правило, невозможно или затруднено. В этом случае использование соотношения (10.12) невозможно, и регулирование скорости повышением частоты выше номинальной производится при постоянном напряжении U1*=1.
О чевидно,
что в этом случае ток намагничивания
Iμ
уменьшается с ростом частоты,
соответственно падает поток двигателя.
Как следует из (10.10), критический момент
снижается примерно обратно пропорционально
квадрату частоты. Однако, поскольку ток
ротора
чевидно,
что в этом случае ток намагничивания
Iμ
уменьшается с ростом частоты,
соответственно падает поток двигателя.
Как следует из (10.10), критический момент
снижается примерно обратно пропорционально
квадрату частоты. Однако, поскольку ток
ротора
![]() можно за счет увеличения скольжения
длительно поддерживать равным
номинальному, то длительно допустимый
номинальный момент уменьшается
обратно-пропорционально частоте в
первой степени. Поскольку с увеличением
частоты скорость двигателя увеличивается,
то длительно допустимая мощ-ность на
валу двигателя остается примерно
посто-янной. Поэтому регулирова-ние
повышением частоты сверх номинальной
при сох-ранении постоянства напря-жения
относят к регули-рованию с постоянством
мощности. Механические характеристики
для этого случая приведены на рис. 10.5.
Регулирование измене-нием частоты вниз
от номи-нальной с одновременным
регулированием напряже-ния в соответствии
с соотношением (10.13) относят к регулированием
с постоянным моментом.
можно за счет увеличения скольжения
длительно поддерживать равным
номинальному, то длительно допустимый
номинальный момент уменьшается
обратно-пропорционально частоте в
первой степени. Поскольку с увеличением
частоты скорость двигателя увеличивается,
то длительно допустимая мощ-ность на
валу двигателя остается примерно
посто-янной. Поэтому регулирова-ние
повышением частоты сверх номинальной
при сох-ранении постоянства напря-жения
относят к регули-рованию с постоянством
мощности. Механические характеристики
для этого случая приведены на рис. 10.5.
Регулирование измене-нием частоты вниз
от номи-нальной с одновременным
регулированием напряже-ния в соответствии
с соотношением (10.13) относят к регулированием
с постоянным моментом.
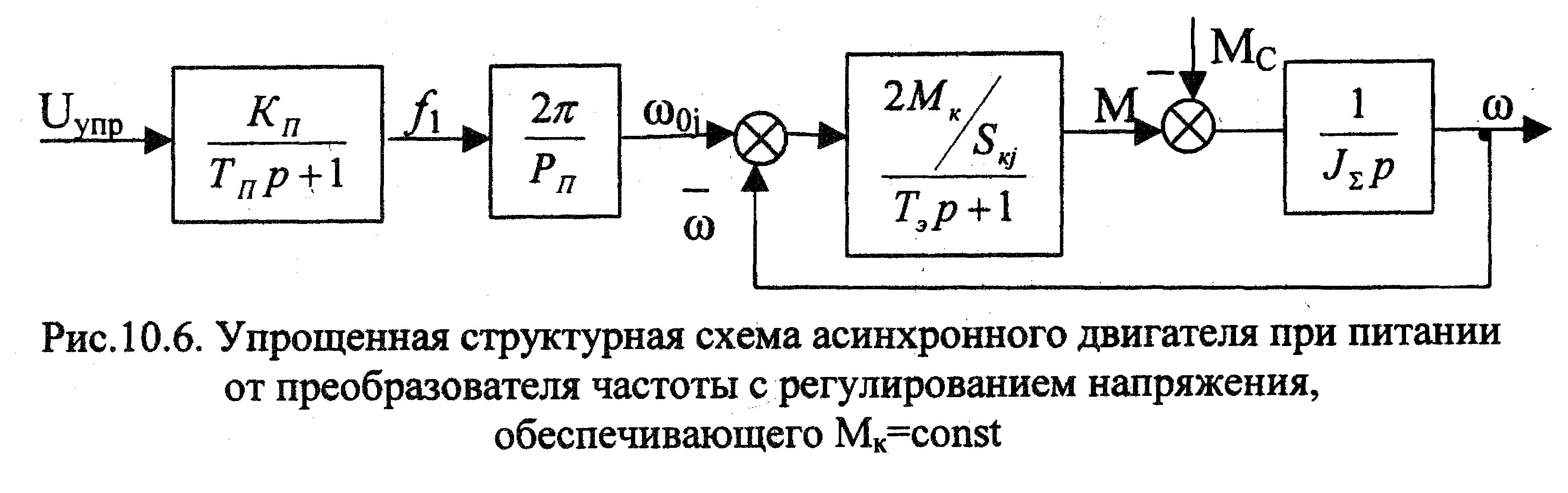
Поскольку асинхронный двигатель при частотном регулировании работает на рабочей линейной (линеаризованной) части механической характеристики, то приближенно оценивать его динамические характеристики можно аналогично тому, как это выполнялось при анализе динамики нерегулируемого асинхронного двигателя (см.§4.8). Тогда при условии, что при изменении частоты поток двигателя поддерживается постоянным, т.е. выполняется соотношение (10.10) или (10.13) асинхронный двигатель с питанием от преобразователя частоты может упрощенно быть представлен структурной схемой, приведенной на рис.10.6. Обозначения на структурной схеме приведены в .§4.8. Преобразователь представлен на структурной схеме как апериодическое звено с постоянной времени ТП. Более полное представление о динамических характеристиках асинхронного привода с частотным регулированием скорости дано в главе 16.
Существующие вентильные (полупроводниковые) преобразователи частоты можно разделить на три группы:
1 – преобразователи с непосредственной связью;
2 – преобразователи с промежуточным высокочастотным звеном;
3 – преобразователи частоты с промежуточным звеном постоянного тока.
10.2. Электропривод по системе преобразователь частоты с непосредственной связью – асинхронный двигатель
П реобразователь
частоты с непосредственной связью
включается в статорную цепь асинхронного
двигателя и служит для преобразования
напряжения стандартной частоты в
регулируемое в определенных пределах
напряжение по величине и частоте.
реобразователь
частоты с непосредственной связью
включается в статорную цепь асинхронного
двигателя и служит для преобразования
напряжения стандартной частоты в
регулируемое в определенных пределах
напряжение по величине и частоте.
Преобразователи частоты с непосредственной связью обычно представляют собой три согласованно работающих реверсивных тиристорных преобразователя постоянного тока. Блок схема непосредственного преобразователя частоты представлена на рис.10.7. Развернутая схема каждого из трех реверсивных преобразователей дана на рис.6.10в.
Каждая фаза асинхронного двигателя питается от своего реверсивного преобразователя. Напряжение, прикладываемое к обмотке статора, будет равно:
![]() .
.
Если угол регулирования α устанавливать в соответствии с текущим значением частоты, например,
 (10.15)
(10.15)
и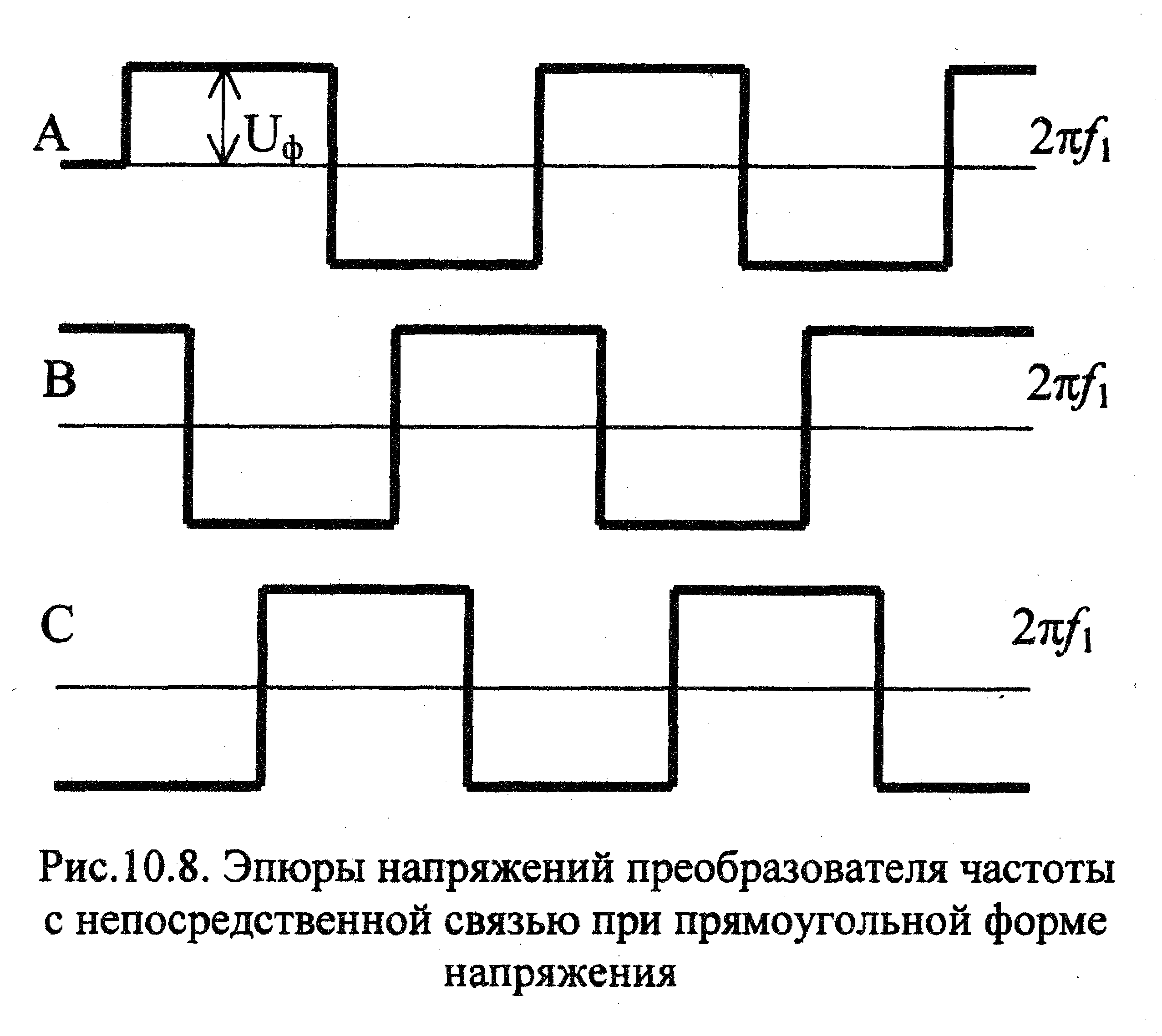 поддерживать неиз-менным в течение
одно-го полупериода входной частоты
преобразователя, а в течение второй
полуволны переключать группы вентилей
преоб-разователя с углом уп-равления
поддерживать неиз-менным в течение
одно-го полупериода входной частоты
преобразователя, а в течение второй
полуволны переключать группы вентилей
преоб-разователя с углом уп-равления
![]() ,
то получим переменное на-пряжение
прямоуголь-ной формы заданной час-тоты.
Сдвинув моменты включения преобразо-вателей,
питающих фазы В и С двигателя соответственно
на
,
то получим переменное на-пряжение
прямоуголь-ной формы заданной час-тоты.
Сдвинув моменты включения преобразо-вателей,
питающих фазы В и С двигателя соответственно
на
![]() и
и
![]() ,
получим трехфазную систему напряжений
прямоугольной формы заданной частоты
и соответствующей ей амплитуды напряжения
(рис.10.8).
,
получим трехфазную систему напряжений
прямоугольной формы заданной частоты
и соответствующей ей амплитуды напряжения
(рис.10.8).
Если величину αв и αн в течение каждого полупериода заданной частоты регулировать по арккосинусоидальному закону
![]()
где
 ,
то среднее значения фазных напряжений
будут иметь синусоидальную форму
,
то среднее значения фазных напряжений
будут иметь синусоидальную форму
![]() .
.
Для получения приемлемой формы выходного напряжения частота напряжения питающей сети должна быть в несколько раз выше частоты выходного напряжения.
Преобразователи частоты с непосредственной связью по схеме рис.10.7 дают возможность при частоте питания 50Гц получать выходную частоту в пределах 0-20Гц. Поэтому асинхронные электроприводы данного типа чаще всего применяются для тихоходных безредукторных электроприводов средней и большой мощности.
О
Рис.10.9.
Механические характеристики электропривода
НПЧ-АД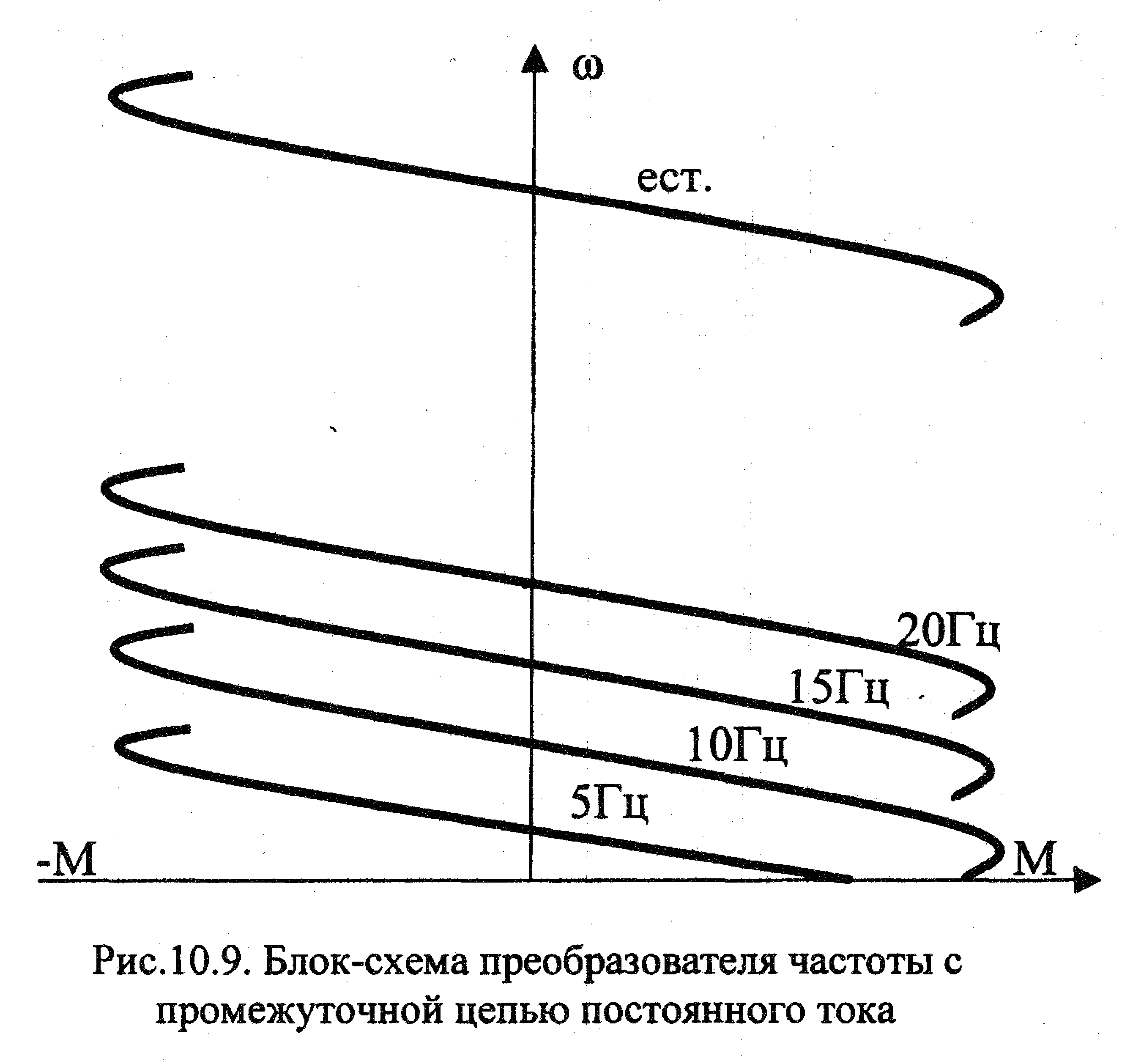
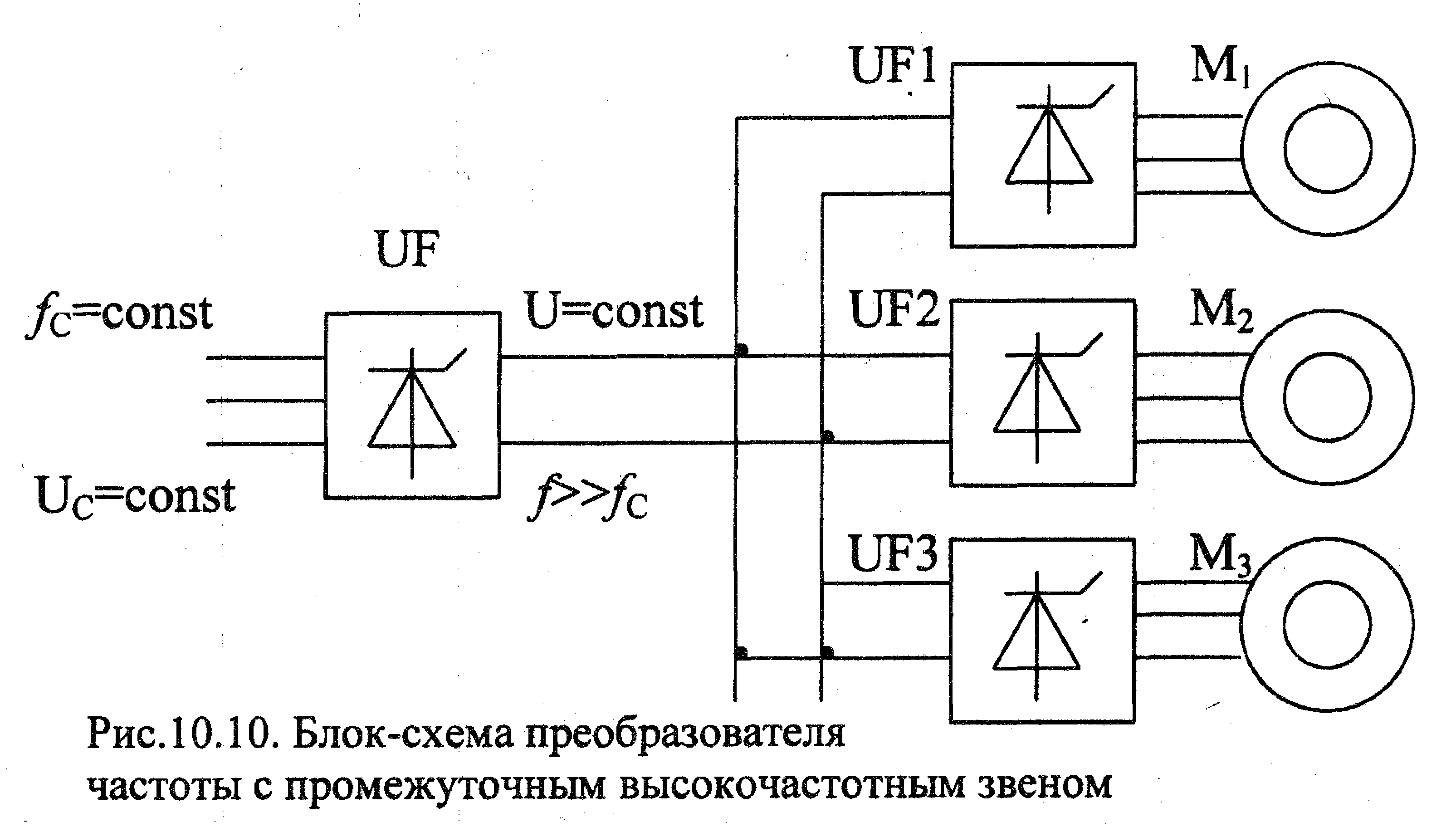
Для повышения диапазона регу-лирования часто-ты применяют схемы с промежуточным звеном повышенной частоты (см.рис.10.10). В такой системе первым звеном преобразования энергии является вентильный агрегат, преобразующий напряжение стандартной частоты в напряжение нерегулируемой повышенной частоты (400-2000Гц), а затем это напряжение посредством преобразователя частоты с непосредственной связью превращается в регулируемое по частоте и напряжению. Такие системы эффективны для многодвигательных электроприводов.
10.3. Электропривод по системе преобразователь частоты типа автономный инвертор – асинхронный двигатель
В этой системе используются преобразователи частоты с промежуточной цепью постоянного тока. Блок схема такого преобразователя представлена на рис.10.11.
П еременное
напряжение промышлен-ной сети сна-чала
выпрямляется пос-редством ре-гулируемого
или нерегу-лируемого выпрямителя UD,
а затем подается на автономный инвертор,
преобразующий постоянное напряжение
(или ток) в напряжение (или ток) регулируемой
частоты и величины.
еременное
напряжение промышлен-ной сети сна-чала
выпрямляется пос-редством ре-гулируемого
или нерегу-лируемого выпрямителя UD,
а затем подается на автономный инвертор,
преобразующий постоянное напряжение
(или ток) в напряжение (или ток) регулируемой
частоты и величины.
Регулирование величины напряжения (или тока) промежуточного звена постоянного тока может производиться управляемым выпрямителем UD, либо (в инверторах напряжения) в качестве первого звена используется неуправляемый выпрямитель, а регулирование напряжения осуществляется инвертором методом широтно-импульсного регулирования. В первом случае функции управления четко разделены: выпрямитель управляет величиной тока или напряжения, а инвертор – значением выходной частоты преобразователя. Во втором случае обе этих функции возлагаются на инвертор.
Важным узлом преобразователей с промежуточным звеном постоянного тока является фильтр F. Этот фильтр выполняет две функции: сглаживает пульсации выпрямленного напряжения (или тока) и служит устройством для накопления и отдачи энергии, что необходимо для обеспечения циркуляции реактивной мощности между обмотками асинхронного двигателя и фильтром. Поскольку на входе преобразователя установлен полупроводниковый выпрямитель, то циркуляция реактивной мощности между асинхронным двигателем и сетью невозможна.
Преобразователи частоты по типу автономного инвертора, используемые в электроприводах, позволяют получать выходную частоту от долей Герца до нескольких сотен Гц. Верхний предел ограничивается возможной частотой коммутации вентилей инвертора, нижний – качеством выходного напряжения или тока; при несинусоидальной форме тока в обмотках двигателя при малых частотах нарушается равномерность вращения ротора – он переходит в режим «шагания».

При частотно-токовом управлении асинхронным двигателем применяются автономные инверторы тока (см.рис.10.12). Отличительной особенностью этих инверторов является наличие мощного дросселя (индуктивного фильтра L) в цепи постоянного тока и отсутствие обратных диодов в мостовой схеме инвертора. Для коммутации тиристоров используются коммутирующие конденсаторы С. Принцип коммутации состоит в следующем (см.рис.10.12). Пусть открыты тиристоры VS1 и VS2. Ток проходит через фазы двигателя «а» и «с». Конденсатор С13 заряжен с положительным зарядом на верхней обкладке. При подаче отпирающего импульса на тиристор VS3 он открывается, и образуется короткозамкнутый контур С13-VS1-VS3-C13, по которому происходит перезаряд конденсатора С13. Под действием тока перезаряда тиристор VS1 закроется и ток далее будет протекать через тиристор VS3, фазы «в» и «с» двигателя и тиристор VS2. Полярность заряда конденсатора С13 изменится на обратную. Затем открывается тиристор VS4 и ток переходит с фазы «с» на фазу «а» (в обратном направлении) и т.д. За время периода заданной частоты происходит 6 коммутаций тиристоров, в результате чего по обмоткам статора двигателя будет протекать трехфазный переменный ток прямоугольной формы заданной частоты.
Величина тока контролируется регулятором тока РТ, в соответствии с выходным сигналом которого изменяется угол управления тиристорами и на выходе выпрямителя UD устанавливается необходимая величина выпрямленного напряжения. Выходная частота преобразователя определяется блоком управления вентилями инвертора БУИ в соответствии с заданием частоты.
Достоинствами инвертора тока являются относительная простота схемы, возможность ее реализации на тиристорах, что позволяет выполнять преобразователи на большую мощность и высокое напряжение. В приводах с инвертором тока возможен режим рекуперативного торможения. Для этого, не изменяя направление тока в звене постоянного тока, управляемый выпрямитель переводится в инверторный режим (угол α устанавливается больше π/2).
Недостатками инверторов тока является несинусоидальная форма тока в обмотках статора, а также невозможность питания от одного преобразователя нескольких асинхронных двигателей.
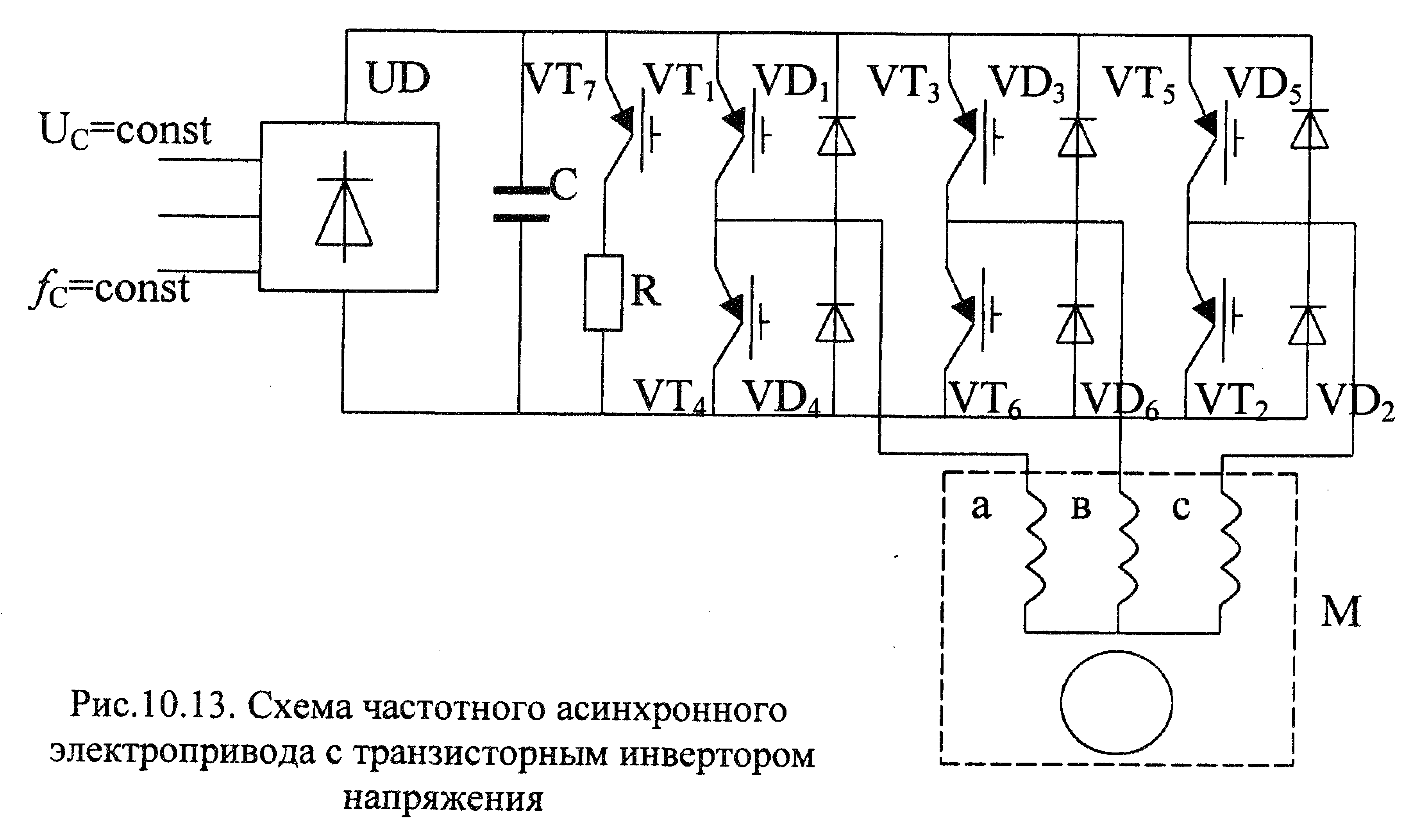
В настоящее время большинство преобразователей изготавливаются по схеме автономного инвертора напряжения. Это связано с появлением полностью управляемых силовых полупроводниковых приборов: IGB – транзисторов и запираемых тиристоров. Типичная схема электропривода с инвертором напряжения на полностью управляемых приборах дана на рис.10.13. Схемной особенностью инвертора напряжения является наличие обратных диодов VD1-VD6 и фильтрового конденсатора С.
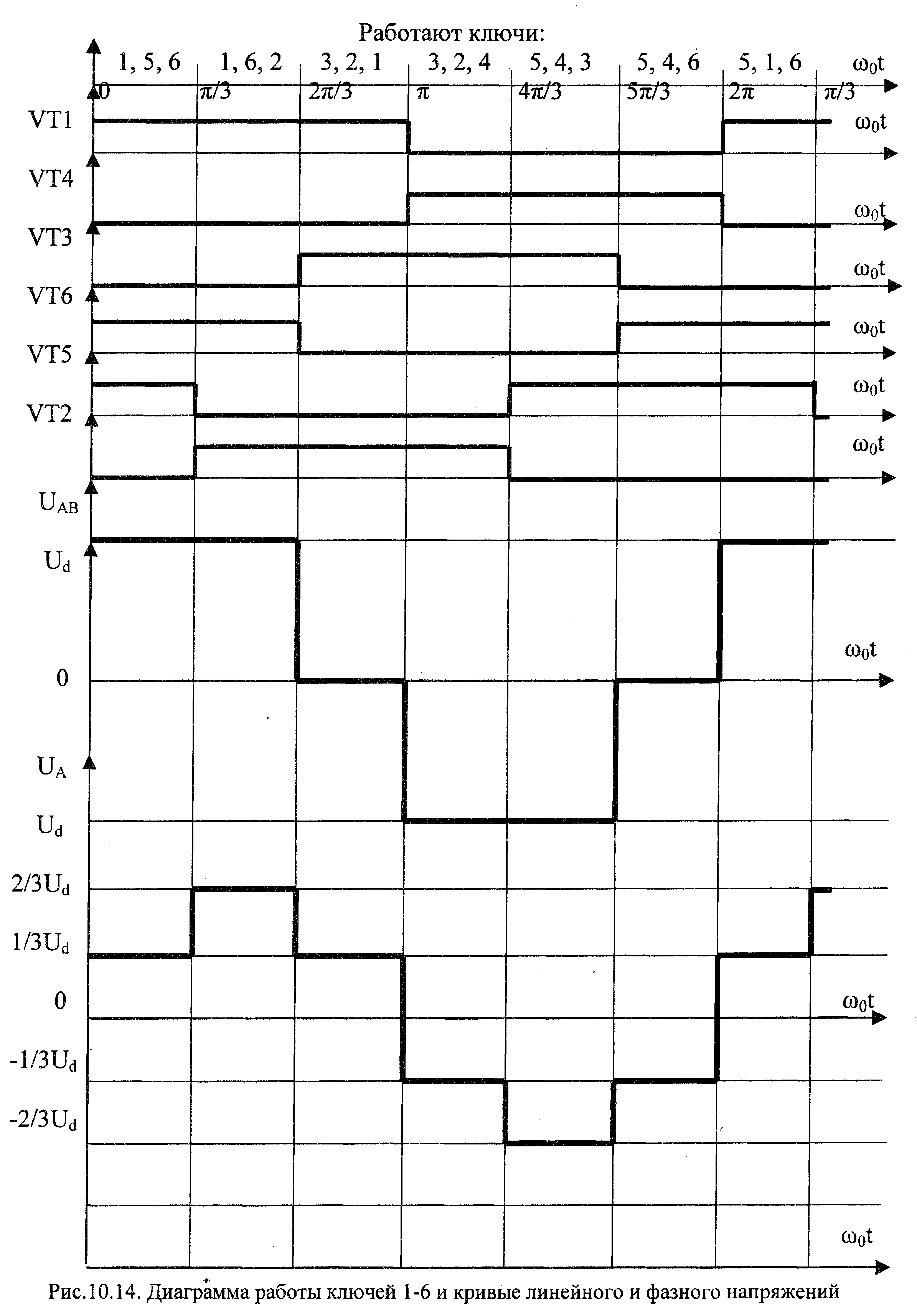
В отличие от инверторов тока, для которых характерным является работа в каждый момент времени по одному вентилю в анодной и катодной группах, в инверторах напряжения более целесообразна одновременная работа двух вентилей в одной группе и одного в другой. При этом продолжительность работы каждого вентиля составляет 2π. Допустим, что в некоторый момент времени работают транзисторы VT1, VT2 и VT6. Тогда ток протекает по всем трем фазным обмоткам двигателя, причем половина напряжения Ud прикладывается к фазе «а» и к двум параллельно включенным фазам «в» и «с». При запирании транзистора VT2 и включении транзистора VT5 ток в фазе «в» не может мгновенно измениться и замыкается через диоды VD3 и VD4 на конденсатор С, чем обеспечивается циркуляция реактивной мощности между обмотками двигателя и конденсатором С. После включения транзистора VT6 ток будет протекать по параллельно включенным фазам «а» и «с» и по фазе «в» и т.д. Фазное напряжение, прикладываемое к обмоткам двигателя, будет иметь форму, показанную на рис.10.14.
Требуемая выходная частота определяется частотой переключения вентилей инвертора и задается каналом регулирования частоты. Регулирование величины выходного напряжения может производиться двумя способами:
-
использованием управляемого выпрямителя на входе преобразователя, с помощью которого регулируется величина Ud;
использованием способа широтно-импульсного регулирования (см.§6.3), осуществляемого вентилями инвертора; в этом случае входной выпрямитель может быть принят неуправляемым. Первый способ характеризуется двумя недостатками: ступенчатой формой выходного напряжения (см.рис.10.14) и низким коэффициентом мощности преобразователя.
Более современным является второй способ. При широтно-импульсном способе регулирования возможно не только регулирование средней величины напряжения за период, но и корректировка формы выходного напряжения. Такое регулирование называется широтно-импульсной модуляцией (ШИМ). Принцип широтно-импульсной модуляции синусоидального напряжения поясняется рис.10.15 [1-10].
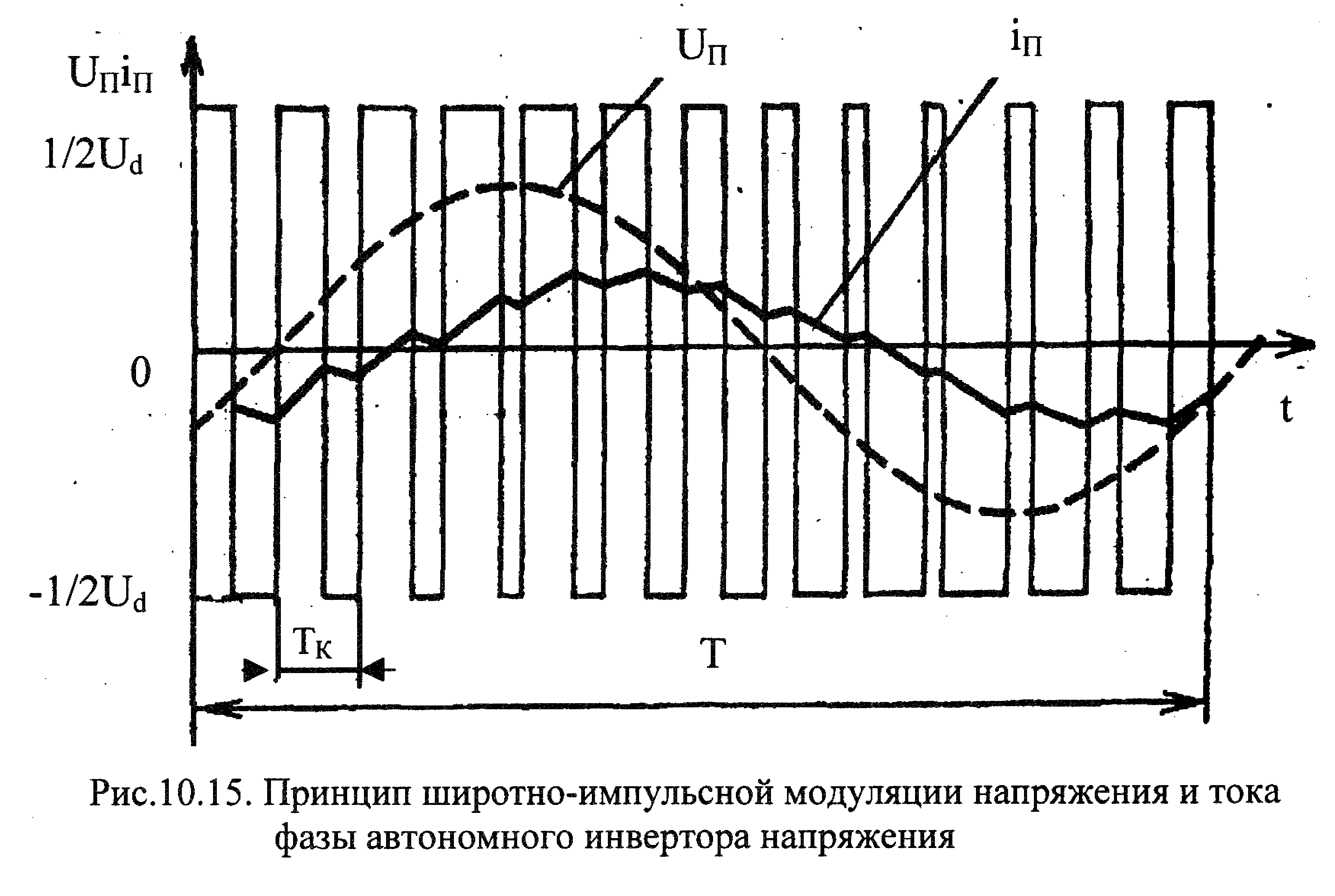
Так как для двуполярной коммутации
![]() ,
,
то,
регулируя непрерывно скважность по
синусоидальному закону,
 можно
получить среднее напряжение, также
изменяющееся по синусоиде.
можно
получить среднее напряжение, также
изменяющееся по синусоиде.
Изменяя
с помощью системы управления амплитуду
U1*
и угловую частоту
![]() ,
можно производить регулирование частоты
и величины выходного напряжения
преобразователя.
,
можно производить регулирование частоты
и величины выходного напряжения
преобразователя.
При использовании инверторов напряжения для реализации режима рекуперативного торможения асинхронного двигателя необходимо применение на входе реверсивного преобразователя с двумя группами вентилей, что усложняет схему преобразователя и снижает ее надежность. Поэтому в инверторах напряжения обычно предусматривают разрядное сопротивление R (см. рис.10.13), которое подключается в режиме торможения транзистором VT7 и в котором рассеивается энергия торможения.
Существует большое число разновидностей схем преобразователей частоты с автономными инверторами тока и напряжения, которые рассматриваются в литературе по преобразовательной технике [1-7].
Глава 11. Асинхронные вентильные каскады и двигатели двойного питания
11.1. Принцип работы каскадных схем асинхронного привода
Регулирование скорости асинхронного двигателя в схемах вентильного каскада и двигателя двойного питания производится путем изменения скольжения двигателя при постоянной скорости вращения электромагнитного поля. Основная идея – полезное использование мощности скольжения, трансформируемой в цепь ротора (§4.3). С этой целью в цепь ротора асинхронного фазного двигателя вводится добавочная э.д.с. Статорные обмотки двигателя непосредственно подключаются к питающей сети.
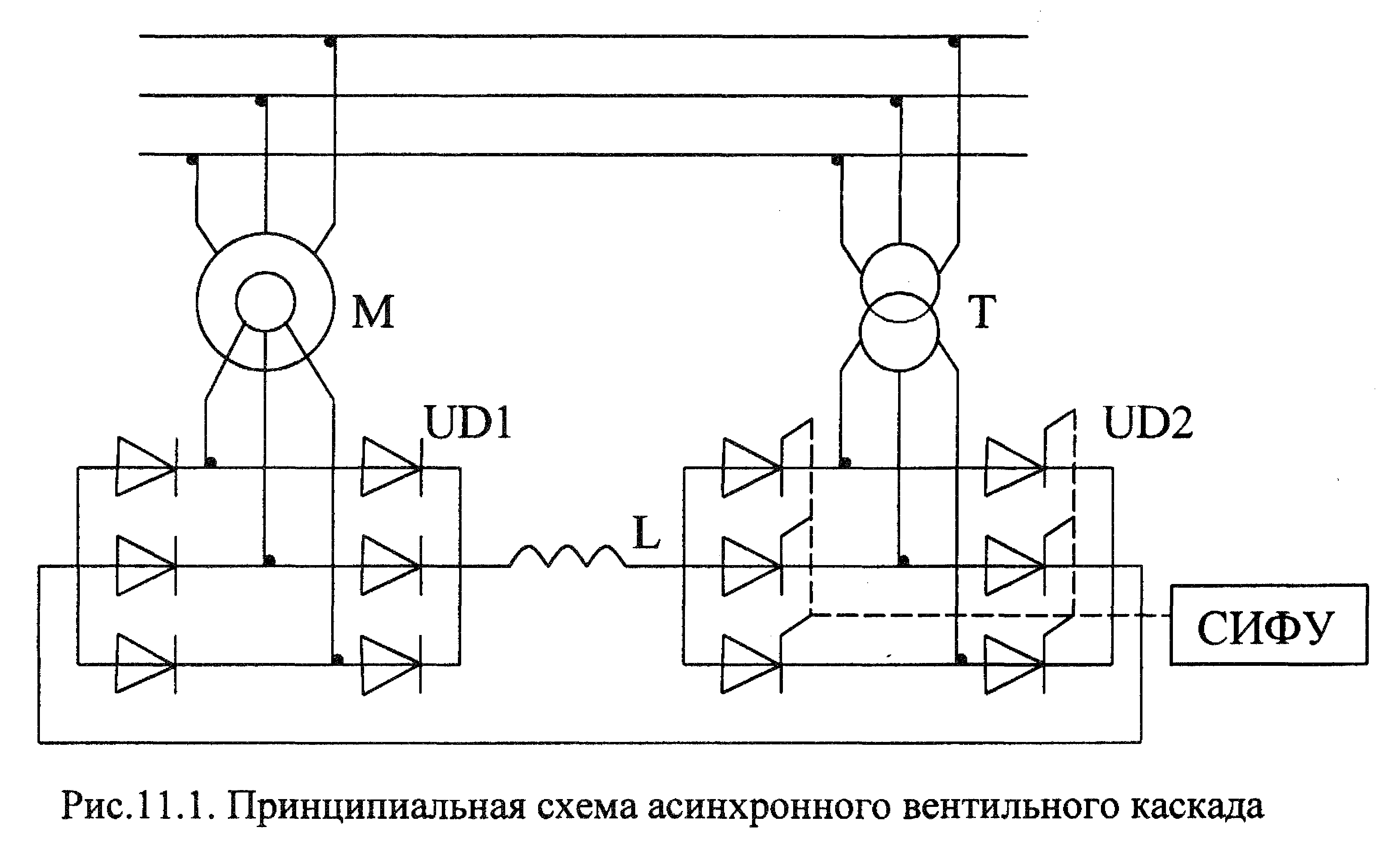 Схема
вентильного кас-када представлена на
рис. 11.1. Трудность полезного использования
энергии скольжения состоит в том, что
э.д.с. ротора Е2
и соответственно
ток ротора I2
имеют переменную частоту, зависящую от
скольжения (скорости) двигателя –
см.формулы 4.8, 4.9. В схемах вентильного
каскада ток ротора асинхронного двигателя
с фазным ротором выпрямляется посредством
неуправляемого выпрямителя UD1,
и уже в цепь выпрямленного тока ротора
вводят добавочную противоэ.д.с. постоянного
тока – э.д.с. инвертора UD2.
Трансформатор Т служит для согласования
напряжения сети и напряжение ротора
двигателя.
Схема
вентильного кас-када представлена на
рис. 11.1. Трудность полезного использования
энергии скольжения состоит в том, что
э.д.с. ротора Е2
и соответственно
ток ротора I2
имеют переменную частоту, зависящую от
скольжения (скорости) двигателя –
см.формулы 4.8, 4.9. В схемах вентильного
каскада ток ротора асинхронного двигателя
с фазным ротором выпрямляется посредством
неуправляемого выпрямителя UD1,
и уже в цепь выпрямленного тока ротора
вводят добавочную противоэ.д.с. постоянного
тока – э.д.с. инвертора UD2.
Трансформатор Т служит для согласования
напряжения сети и напряжение ротора
двигателя.