

Глава 15. Типовые системы регулирования электроприводов постоянного тока
15.1. Системы регулирования скорости
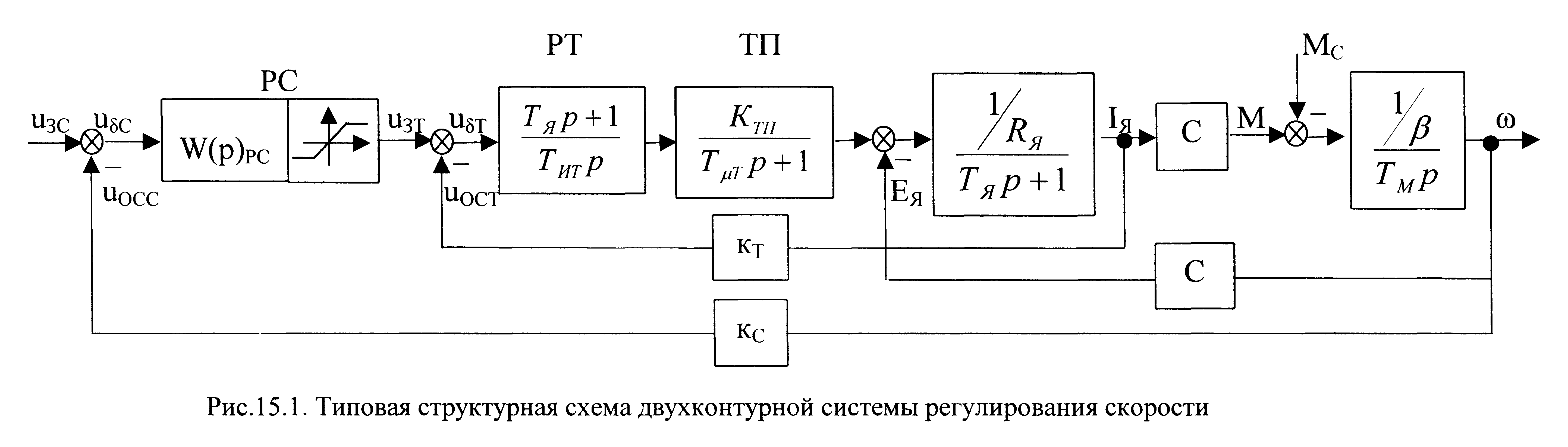
Современные электроприводы постоянного тока, обеспечивающие регулирование скорости в широких пределах, проектируются и выпускаются промышленностью как двухконтурные системы с подчиненным регулированием координат. Внешним контуром регулирования является контур скорости, а внутренним – контур тока. Регулирование скорости в этих системах осуществляется изменением напряжения на якоре двигателя. В качестве преобразователей постоянного тока, питающих якорь обычно используются управляемые выпрямители – тиристорные преобразователи (ТП) или преобразователи постоянного напряжения – в регулируемое постоянное с широтно-импульсной модуляцией – ШИМ–преобразователи.
На рис.15.1 приведена типовая структурная схема двухконтурной системы регулирования скорости. В этой схеме двигатель, работающий с постоянным потоком возбуждения, представлен стандартной структурной схемой (см.рис.6.22).
Построение системы регулирования следует начинать с синтеза контура тока, сделав допущение, что внутренняя обратная связь по э.д.с. двигателя отсутствует. Такое допущение возможно, так как обычно за время переходного процесса в оптимизированном контуре тока скорость двигателя изменяется незначительно и влияние внутренней связи по э.д.с. на переходный процесс в контуре тока практически не проявляется.
Тип настройки контура скорости определяется техническими требованиями к систему регулирования скорости.
15.2. Синтез контура регулирования тока
Р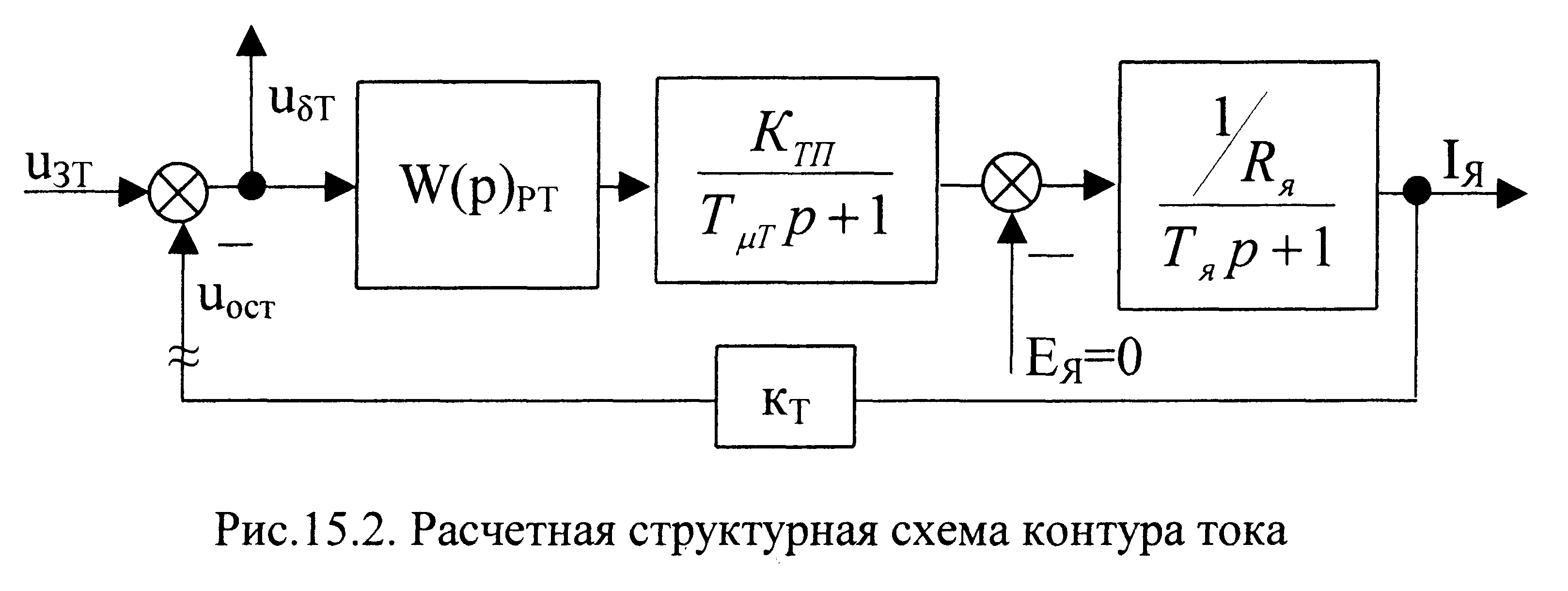 асчетная
структурная схема контура тока приведена
на рис.15.2. По условиям высокого
быстродействия и малого перерегулирования
кон-тур тока обычно нас-траивается на
моду-льный оптимум (МО). В контуре тока
объе-ктом регулирования является якорная
цепь двигателя, представляющая собой
апериодическое звено с большой постоянной
времениТя,
т.е.
асчетная
структурная схема контура тока приведена
на рис.15.2. По условиям высокого
быстродействия и малого перерегулирования
кон-тур тока обычно нас-траивается на
моду-льный оптимум (МО). В контуре тока
объе-ктом регулирования является якорная
цепь двигателя, представляющая собой
апериодическое звено с большой постоянной
времениТя,
т.е.
 .
(15.1)
.
(15.1)
Тиристорный преобразователь, питающий якорную цепь двигателя, рассматривается как апериодическое звено с малой некомпенсируемой постоянной времени с передаточной функцией
![]() ,
(15.2)
,
(15.2)
где: КТП – коэффициент усиления по напряжению тиристорного преобразователя;
![]() - постоянная времени
тиристорного преобразователя, определяемая
схемой выпрямления (см.§14.9).
- постоянная времени
тиристорного преобразователя, определяемая
схемой выпрямления (см.§14.9).
Разомкнутый контур тока, настроенный на МО, должен иметь передаточную функцию
![]() ,
,
где:
![]() -
коэффициент настройки контура тока на
МО;
-
коэффициент настройки контура тока на
МО;
![]() - стандартный
коэффициент настройки.
- стандартный
коэффициент настройки.
Передаточная
функция регулятора тока находится, если
приравнять передаточную функцию
разомкнутого контура тока и желаемую
передаточную функцию (14.3), т.е.
![]() или в развернутой форме
или в развернутой форме
 .
.
Тогда
 ,
(15.3)
,
(15.3)
где:
![]() - постоянная времени интегрирования
регулятора тока;
- постоянная времени интегрирования
регулятора тока;
![]() - коэффициент
усиления регулятора тока.
- коэффициент
усиления регулятора тока.
Следовательно, регулятор тока представляет собой пропорционально-интегральное звено.
Из передаточной
функции (15.3) следует, что в составе
регулятора тока имеется форсирующее
звено
![]() ,
которое компенсирует действие
апериодического звена объекта управления
,
которое компенсирует действие
апериодического звена объекта управления![]() .
.
Н Рис.15.3.
Переходные процессы в контуре тока с
коэффициентами настройки аМТ=1,2,4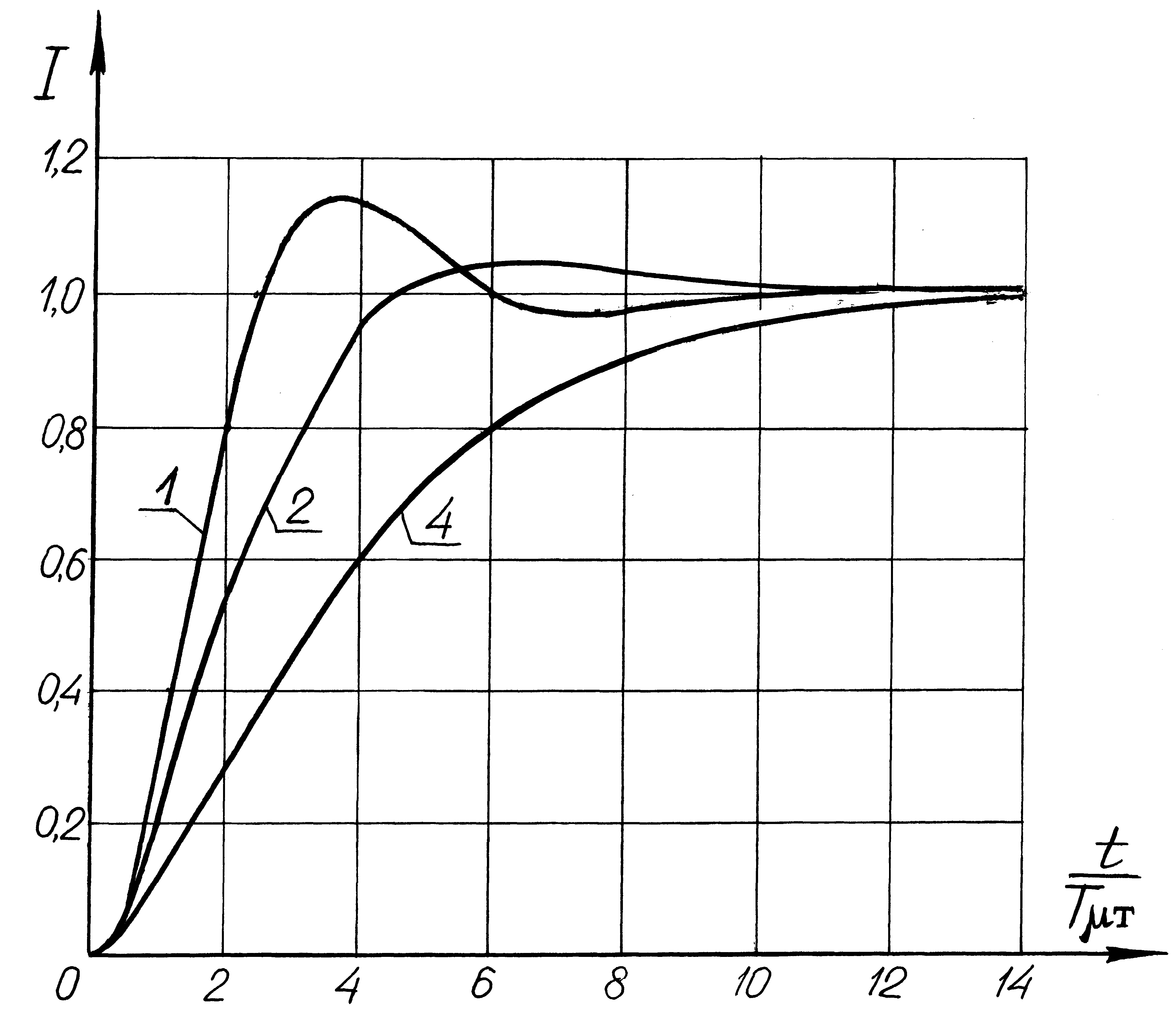
![]() .
Уменьшение зна-ченияаМТ
по сравнению со стандартным снижает
запас по фазе и, следовательно, повышает
перерегулирова-ние. Например, при аМТ=1
.
Уменьшение зна-ченияаМТ
по сравнению со стандартным снижает
запас по фазе и, следовательно, повышает
перерегулирова-ние. Например, при аМТ=1![]() ,
время пере-ходного процесса уменьша-ется,
а перерегулирование возрастает. При
увеличенииаМТ
запас по фазе воз-растает. Так при аМТ=4
запас по фазе
,
время пере-ходного процесса уменьша-ется,
а перерегулирование возрастает. При
увеличенииаМТ
запас по фазе воз-растает. Так при аМТ=4
запас по фазе
![]() ,
время переходного процесса увеличивается
до
,
время переходного процесса увеличивается
до![]() ,
а переходный процесс становится
апериодическим. Графики переходных
процессов в контуре тока при различных
значениямаМТ
показаны на рис.15.3.
,
а переходный процесс становится
апериодическим. Графики переходных
процессов в контуре тока при различных
значениямаМТ
показаны на рис.15.3.
Замкнутый оптимизированный контур тока имеет передаточную функцию
![]() ,
(15.4)
,
(15.4)
где:
![]() - характеристический полином передаточной
функции контура, настроенного на МО.
- характеристический полином передаточной
функции контура, настроенного на МО.
Передаточная функция по сигналу ошибки регулирования тока
![]() .
(15.5)
.
(15.5)
Числитель этой передаточной функции содержит сомножителем оператор р в первой степени. Следовательно, контур тока имеет астатизм первого порядка относительно сигнала задания тока.
При ступенчатом сигнале uзТ установившаяся ошибка регулирования тока uTуст=0, так как при р0 uTуст стремится к нулю, т.е. в установившемся режиме uзT=uосT.
К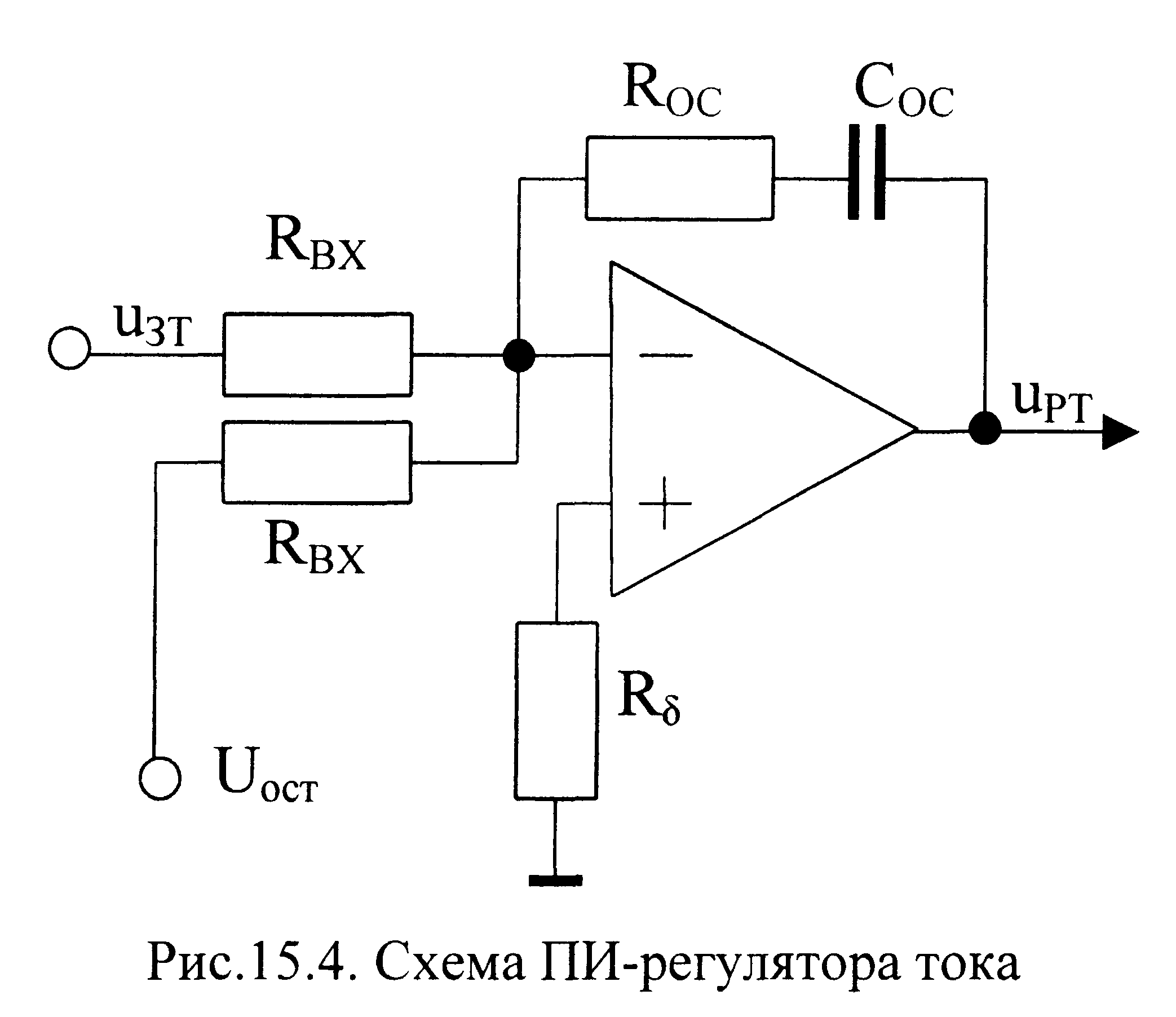 оэффициент
обратной связи по току рассчитывается
из соотношения
оэффициент
обратной связи по току рассчитывается
из соотношения
![]() ,
,
где: uзTмакс=8В - для серий-ных операционных усилителей с учетом возможных перерегу-лирований.
Iмакс доп - максимально до-пустимый ток якоря.
ПИ-регулятор
тока обычно реализуется на операционных
усилителях по схеме рис.15.4. Для этой
схемы
![]() ,
Тит=RосСос
,
Тит=RосСос