

Глава 21. Пример разработки микропроцессорной системы управления электроприводом постоянного тока с подчиненным регулированием координат
21.1. Технические данные рассматриваемого электропривода
Р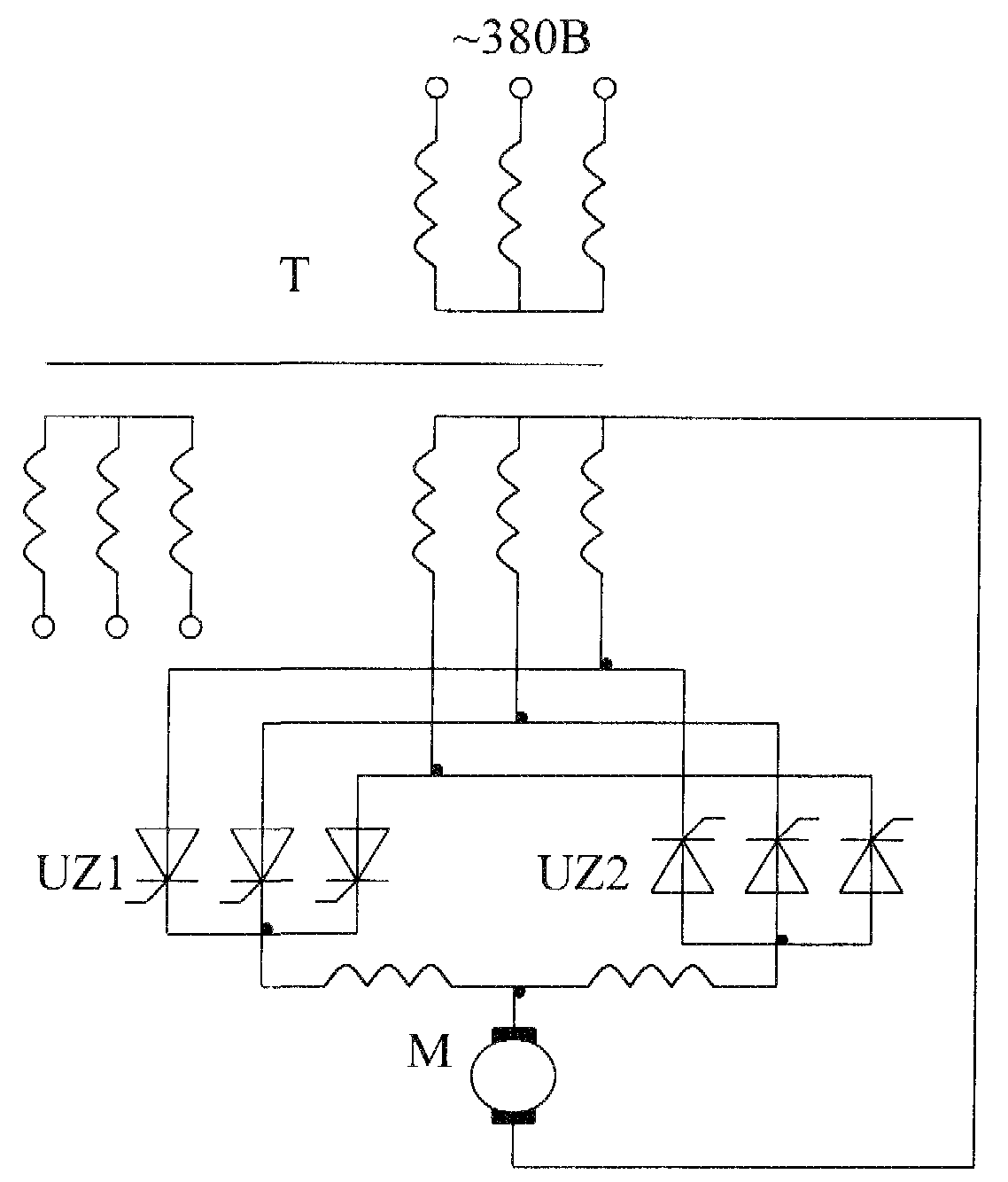 ассмотрим
микропроцессорную систему управления
реверсивным тиристорным электроприводом
постоянного тока с цифровым СИФУ. На
рис.21.1. представлена схема силовой части
электропривода.
ассмотрим
микропроцессорную систему управления
реверсивным тиристорным электроприводом
постоянного тока с цифровым СИФУ. На
рис.21.1. представлена схема силовой части
электропривода.
Технические данные двига-теля следующие:
1. Мощность Рн=2,8кВт
2. Напряжение Uн=220В
3.Номинальная скорость враще-ния nн=1500об/мин
4. Номинальный ток Iн=14,5А
5.Номинальный момент Мн= =17,9Нм
6.Магнитный поток
Фн=5,84·10-3Вб
7. Момент инерции J=0,056кгм2
Р Рис.21.1. Схема силовой части электропривода ассчитанные по стандар-тной методике [см. Раздел 2] ко-эффициенты и постоянные времени звеньев системы сведены в таблицу 21.1.
Таблица 21.1
Параметры силовой части и звеньев системы
|
№№ |
Наименование параметров |
Обозначение и расчетное соотношение |
Размерность |
Значение параметра |
|
1 |
Машинная постоянная электродвигателя |
|
Нм/А, В.с |
1,3 |
|
2 |
Максимальное напряжение тиристорного преобразователя |
Ud0 |
В |
340 |
|
3 |
Сопротивление якорной цепи |
Rяц |
Ом |
6,8 |
|
4 |
Коэффициент передачи якорной цепи |
|
1/Ом |
0,15 |
|
5 |
Индуктивность якорной цепи |
Lяц |
Гн |
0,0954 |
|
6 |
Электромагнитная постоянная времени якорной цепи |
|
с |
0,028 |
|
7 |
Суммарный момент инерции |
JΣ |
кгм2 |
0,07 |
|
8 |
Коэффициент интегрирования механического звена |
|
1/кгм2 |
14,29 |
|
9 |
Электромеханическая постоянная времени |
|
с |
0,14 |
|
10 |
Коэффициент усиления тиристорного преобразователя |
|
- |
42,48 |
|
11 |
Постоянная времени тиристорного преобразователя |
ТТП=Тμ |
с |
0,007 |
|
12 |
Коэффициент обратной связи по скорости |
кС |
В/рад/с |
0,051 |
21.2 Разработка цифровой двухконтурной системы регулирования скорости электропривода постоянного тока с тиристорным преобразователем
При синтезе цифровых регуляторов тока и скорости воспользуемся результатами, приведенными в §17.4.
За величину периода дискретности двухконтурной системы стабилизации скорости электропривода примем величину некомпенсируемой постоянной времени тиристорного преобразователя Т=Тμ=Тт [3-21].
Полученная в §17.4 желаемая дискретная передаточная функция (ДПФ) замкнутого контура тока в соответствии с (17.67) имеет вид
![]() ,
(21.1)
,
(21.1)
где:
![]() ;
;
Кацп – передаточный коэффициент АЦП;
кТ – коэффициент обратной связи по току.
АЦП преобразует
входной аналоговый сигнал, лежащий в
заданном диапазоне изменения (например,
±10В), в целое число. Наибольший числовой
код, определяющий разрешающую способность
АЦП, зависит от числа используемых при
преобразовании разрядов. Диапазон
изменения кодов задается величиной
![]() ,
где m
– число
разрядов. Поэтому 12-разрядный АЦП
позволяет получить максимальный код
,
где m
– число
разрядов. Поэтому 12-разрядный АЦП
позволяет получить максимальный код
![]() .
12-разрядный дифференциальный АЦП с
диапазоном входного сигнала ±10В показан
на рис.21.2.
.
12-разрядный дифференциальный АЦП с
диапазоном входного сигнала ±10В показан
на рис.21.2.
При Dмакс=4096 текущее значение кода принимается в интервале -2048≤D≤2047. Для положительных значений разрешающая способность АЦП определяется по формуле:
Разрешение=10В/2047=0,00489В.
Таким образом, ошибка квантования, определяемая как ±1/2 разрешения, есть ±0,00244В, а относительная ошибка Δ преобразования оценивается по формуле:
Δ=0,00244В/(диапазон измерений, В)
Т
Рис.21.2.
12-разрядный дифференциальный АЦП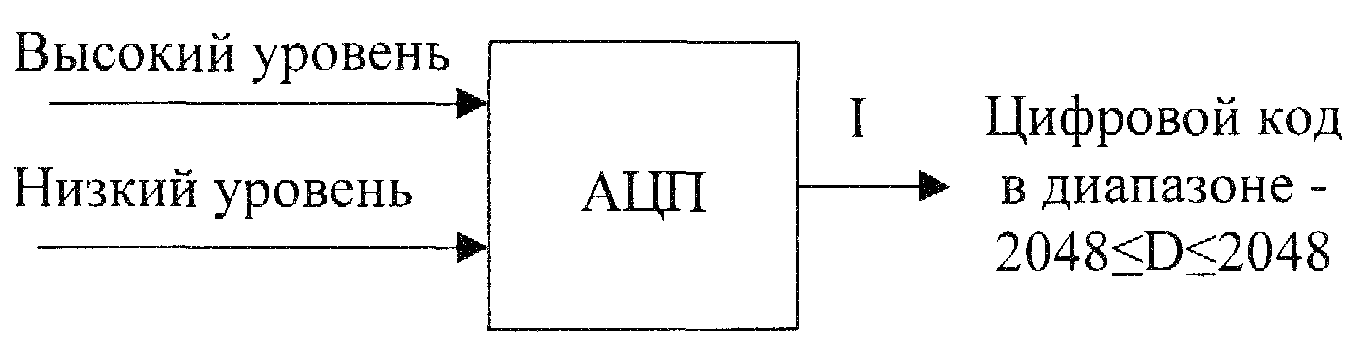
 аким
образом, боль-шую точность можно получить
при использо-вании всей шкалы (т.е. 10В)
усиления.
аким
образом, боль-шую точность можно получить
при использо-вании всей шкалы (т.е. 10В)
усиления.
АЦП, показанный на рис.21.2, является 12-разрядным и выдает код D=1261. В этом случае для определения истинного значения измеренной величины служит формула:
![]() В,
В,
а относительная ошибка преобразования для этого значения напряжения
![]() %,
%,
т.е. является достаточно малой величиной.