

Глава 5. Общие принципы регулирования электропривода
5.1. Общие положения
Регулируемый электропривод является сегодня основным видом автоматизированного электропривода. Применение регулируемого электропривода в составе технологических машин и агрегатов обычно связано с одним из следующих обстоятельств:
- необходимостью оперативного управления ходом технологического процесса (электроприводы грузоподъемных кранов, экскаваторов, реверсивных прокатных станов и других машин);
- необходимостью устанавливать и точно выдерживать технологический режим (электроприводы станов непрерывной прокатки, бумагоделательных машин, отделочных агрегатов текстильной промышленности и др.);
- необходимостью корректировки технологического процесса (электроприводы питателей, дозаторов и др.);
автоматическим управлением режимом обработки материала (электроприводы станков с ЧПУ и др.);
стремление оптимизировать технологический процесс по затратам электроэнергии (электроприводы насосов, вентиляторов, компрессоров).
Приведенный перечень обстоятельств, обуславливающих необходимость или целесообразность применения регулируемого электропривода, может быть расширен и дополнен.
По мере развития рабочих машин и механизмов, применения высоких технологий потребность в регулируемых электроприводах существенно возросла, и автоматизированный регулируемый электропривод составляет энергетическую и кибернетическую (с точки зрения управления) основу большинства рабочих машин и агрегатов во всех технологических областях.
Автоматизированный электропривод выполняет две технологические функции:
- преобразование электрической энергии в механическую, необходимую для осуществления данного технологического процесса;
- управление технологическим процессом, причем с определенной степенью оптимизации этого процесса по ряду критериев, таких как: обеспечение максимальной производительности, точности и качества обработки, минимального расхода энергии и т.п.; конкретные задачи управления многообразны и определяются характером технологического процесса.
Вторая функция автоматизированного электропривода всецело связана с необходимостью регулирования параметров движения электропривода (скорости, момента, положения рабочего органа). Выполнение этой функции возможно только посредством использования регулируемого электропривода. Использование для целей регулирования механических или гидравлических средств (вариаторы, коробки передач, гидромуфты и др.) сегодня является технически и экономически неоправданным.
Под регулируемым электроприводом понимается электропривод, обеспечивающий плавное с необходимой точностью регулирование скорости (или момента) в заданном диапазоне. Однако этим требования к регулируемому электроприводу не ограничиваются. Система управления регулируемого электропривода должна обеспечивать также заданный характер переходных процессов при изменении скорости, момента или других параметров электропривода.
Поскольку по своим электромеханическим свойствам электродвигатели в естественной схеме включения в питающую сеть не могут обеспечить регулирование параметров движения электропривода с нужным качеством, для создания регулируемого электропривода приходится преобразовывать электрическую энергию, подводимую к (или отводимую от) двигателю. Преобразование электрической энергии осуществляется посредством полупроводниковых преобразователей.
Регулируя параметры преобразованной электрической энергии (частоту, напряжение, форму и длительность импульсов и др.) удается получить требуемые для регулируемого привода механические и динамические характеристики. Для управления параметрами (напряжение, частота и др.) полупроводниковых преобразователей, входящих в состав регулируемого электропривода, служат внутренние контуры автоматического регулирования - это регуляторы тока, эдс, тока возбуждения и др. В этом смысле регулируемый электропривод всегда является автоматизированным, т.к. содержит средства автоматического управления, формирующие характеристики электропривода.
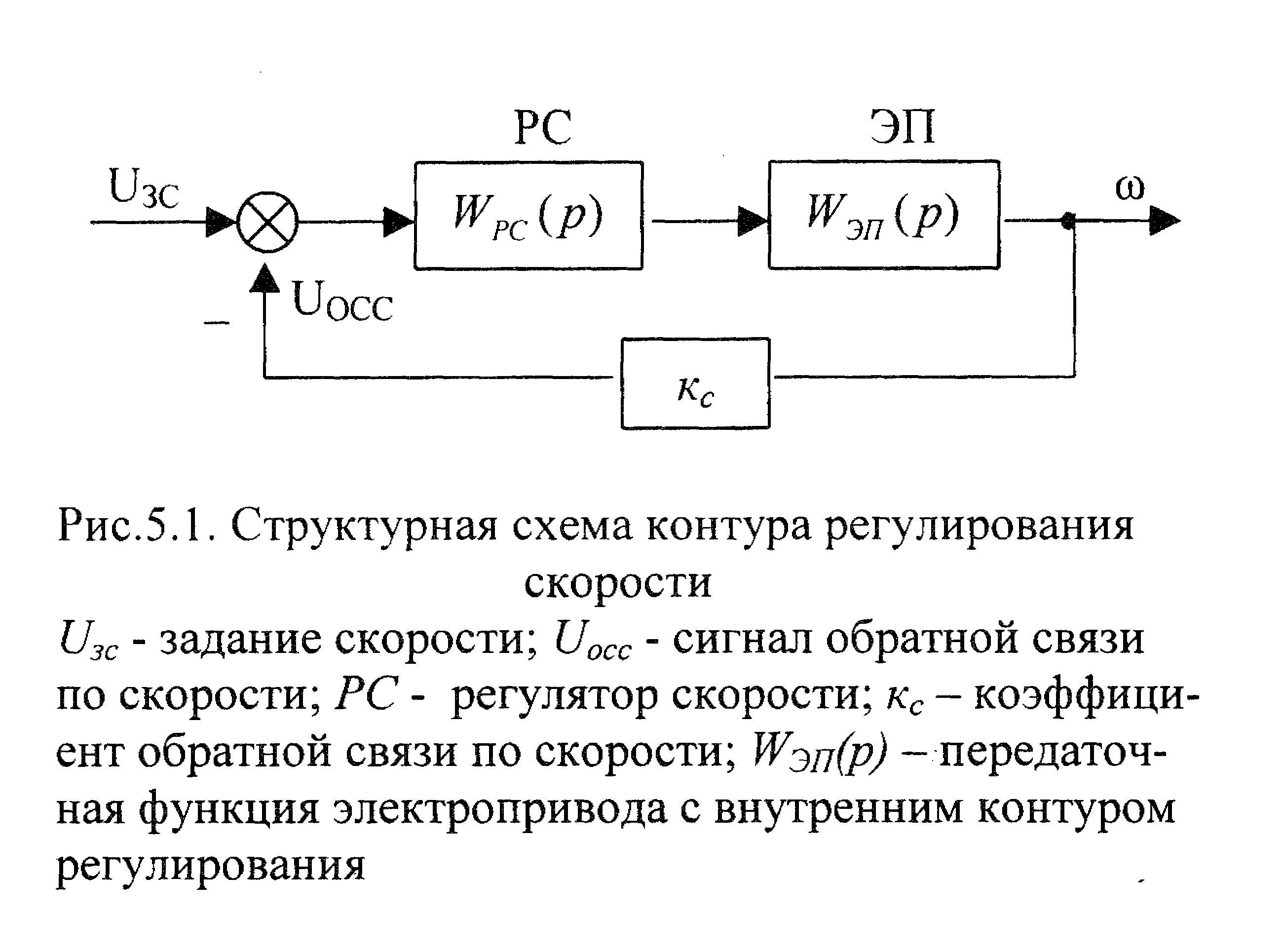
Внешние контуры регулирования определяют параметры движения электропривода: скорость или положение рабочего органа. Обычно эти контуры регулирования являются замкнутыми, т.е. содержат отрицательную обратную связь по регулируемому параметру и соответствующий регулятор. Типичная схема замкнутого контура регулирования скорости представлена на рис.5.1.
Задание на скорость может формироваться вручную - машинистом экскаватора, крановщиком, оператором и др., или автоматически - от системы числового программного управления (системы ЧПУ) в приводе станков, от технологических регуляторов или управляющих вычислительных машин верхнего уровня автоматизации.
Передаточная функция регулятора скорости WЭП(р) выбирается такой, чтобы обеспечить требуемое качество регулирования по статическим (диапазон, точность) и по динамическим показателям (быстродействие, перерегулирование, колебательность).
 Двигатели, полу-проводниковые
пре-образователи элек-трической энергии,
датчики и устройст-ва автоматического
регулирования пара-метров электропри-вода
в своей сово-купности образуют систему
регулируе-мого электропривода. Эти
системы разли-чаются, прежде все-го, по
виду приводного электродвигателя, а
также по виду используемых полупроводниковых
преобразователей электрической энергии,
питающих двигатель.
Двигатели, полу-проводниковые
пре-образователи элек-трической энергии,
датчики и устройст-ва автоматического
регулирования пара-метров электропри-вода
в своей сово-купности образуют систему
регулируе-мого электропривода. Эти
системы разли-чаются, прежде все-го, по
виду приводного электродвигателя, а
также по виду используемых полупроводниковых
преобразователей электрической энергии,
питающих двигатель.
Регулирование скорости - это принудительное средствами управления изменение скорости, исходя из требований технологического процесса. Такое регулирование производится при подаче на вход системы регулирования управляющего воздействия. Однако регулирование скорости может производиться и при неизменном управляющем воздействии, когда задача регулирования заключается в стабилизации скорости при появлении возмущающих воздействий, например при изменении нагрузки, прикладываемой к валу электродвигателя.
Одним из основных показателей, характеризующих регулирование скорости электропривода, является диапазон регулирования. Диапазон регулирования D - это отношение максимальной установившейся скорости электропривода к минимальной при изменении нагрузки на валу двигателя в заданных пределах. Определение величины диапазона регулирования показано рис.5.2.
П
Рис.5.2. К определению
диапазона регулирования по скорости
![]()
 (5.1)
(5.1)
Из графиков рис.5.2. найдем:

Подставляя эти значения в (5.1), получим:
![]() (5.2)
(5.2)
Из этой формулы следует, что диапазон регулирования зависит от жесткости механических характеристик привода: чем больше жесткость, тем больше диапазон регулирования.
Вторым
важным показателем качества регулирования
является точность регулирования
скорости. Статическая ошибка
![]() характеризует реакцию электропривода
на приложение (снятие) нагрузки. Если
мы анализируем регулируемый электропривод,
имеющий линейные (линеаризованные)
механические характеристики, которые
в зависимости от управляющего воздействия
могут бесступенчато перемещаться вниз
от основной с постоянной жесткостью
(см.рис.5.3), то абсолютная статическая
ошибка будет равна:
характеризует реакцию электропривода
на приложение (снятие) нагрузки. Если
мы анализируем регулируемый электропривод,
имеющий линейные (линеаризованные)
механические характеристики, которые
в зависимости от управляющего воздействия
могут бесступенчато перемещаться вниз
от основной с постоянной жесткостью
(см.рис.5.3), то абсолютная статическая
ошибка будет равна:
![]() . (5.3)
. (5.3)
 Относительная
ве-личина ошибки нахо-дится как отношение
абсолютной ошибки к базовой (заданной)
скорости (заданной скорости холостого
хода).
Относительная
ве-личина ошибки нахо-дится как отношение
абсолютной ошибки к базовой (заданной)
скорости (заданной скорости холостого
хода).
![]() .
(5.4)
.
(5.4)
Из (5.3) и (5.4) следует, что величина статической ошибки, связанной с возмущением по нагрузке, обратно пропорциональна жесткости механических характеристик: чем больше жесткость, тем меньше статическая ошибка.
Обычно жесткость механических характеристик электропривода с разомкнутой системой управления недостаточна для достижения требуемого диапазона регулирования и требуемой статической точности. Потому в регулируемых электроприводах, как правило, используются замкнутые по скорости системы регулирования.
Рассмотрим влияние отрицательной обратной связи по скорости на механические характеристики электропривода.
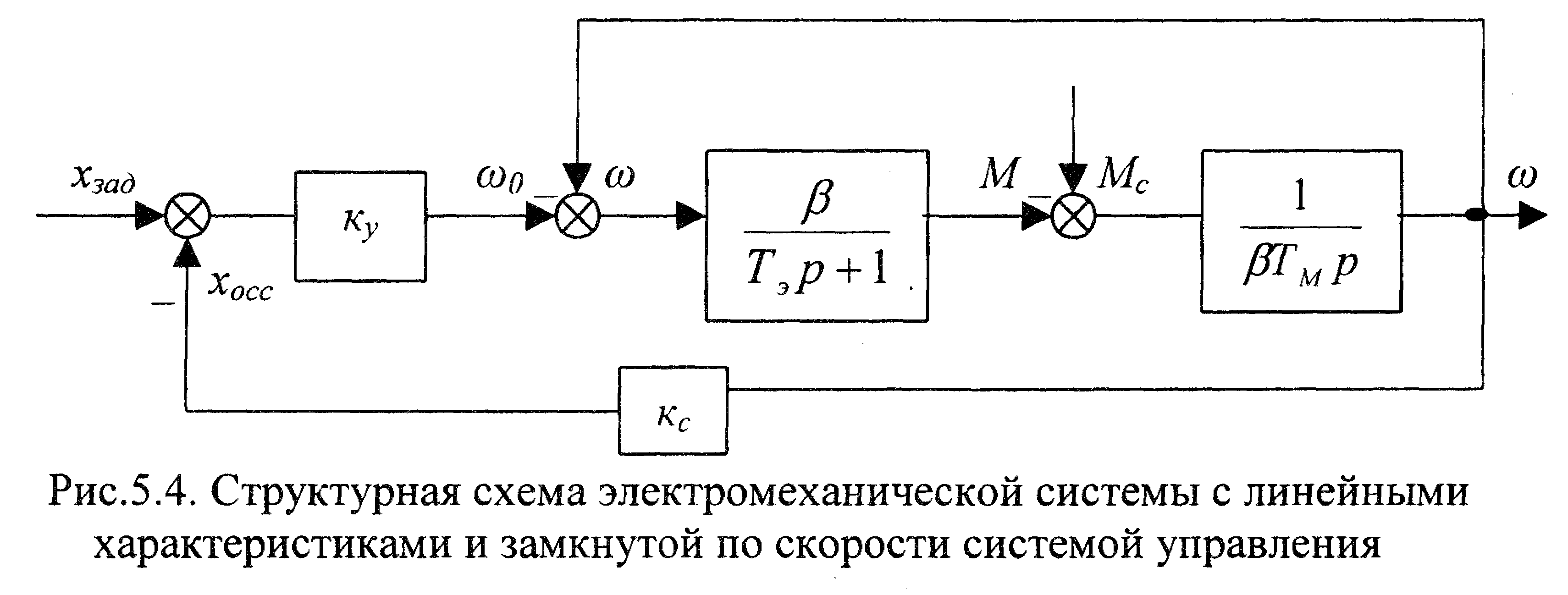
На рис.5.4 представлена структурная схема электропривода с линейными механическими характеристиками, характеризуемая двумя инерционностями: электромагнитной с постоянной времени Тэ и электромеханической с постоянной времени Тм (см.§3.4). В отличие от структурной схемы рис.3.10 в данной схеме привод охвачен отрицательной обратной связью по скорости. В такой схеме заданная величина скорости холостого хода будет определяться величиной разности заданной и действительной скоростей.
![]() . (5.5)
. (5.5)
Если
к валу приводного электродвигателя
прикладывается нагрузка - Мс,
то скорость привода уменьшится на
величину
![]() .
Для определения этой величины найдем
по схеме рис.5.4 передаточную функцию
электропривода по возмущению по нагрузке:
.
Для определения этой величины найдем
по схеме рис.5.4 передаточную функцию
электропривода по возмущению по нагрузке:
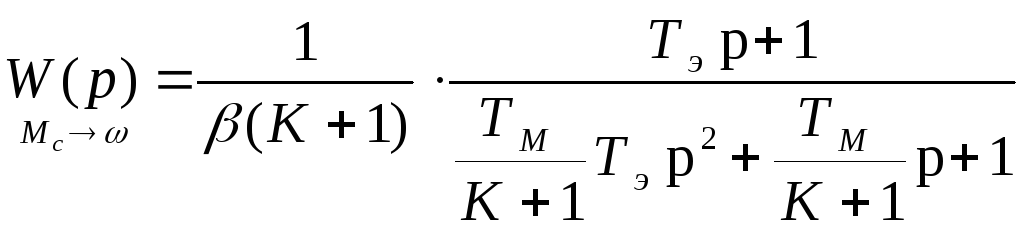 , (5.6)
, (5.6)
где К=кукс - коэффициент усиления разомкнутой системы.
В установившемся режиме, полагая р=0 передаточный коэффициент привода будет:
![]() . (5.7)
. (5.7)
Сравнивая полученную передаточную функцию с передаточной функцией разомкнутой системы (формула 3.16), определим, что в замкнутой системе жесткость механических характеристик повышается в (К+1) раз.
![]() . (5.8)
. (5.8)
Следовательно, ошибка по скорости при приложении нагрузки Мс будет:
![]() , (5.9)
, (5.9)
т.е. ошибка уменьшится в (К+1) раз по сравнению с разомкнутой системой.
Поскольку диапазон регулирования скорости примерно пропорционален жесткости механических характеристик (см.5.2), то в замкнутой по скорости системе по сравнению с разомкнутой диапазон регулирования увеличивается примерно в (К+1) раз.
Рассмотрим
механизм действия отрицательной обратной
связи (см.рис.5.5). Пусть характеристики
1 - механические характеристики привода
с разомкнутой системой управления. Если
задано значение скорости 0зад,
то при Мс=0
привод будет работать с заданной
скоростью. При приложении нагрузки Мс
и разомкнутой системе регулирования
скорость двигателя снизится на величину
![]() ,
равную отрезкуав.
При этом двигатель работает на
механической характеристике, определяемой
прямой 0зад-в,
имеющей жесткость ,
и просадка скорости определяется
в
,
равную отрезкуав.
При этом двигатель работает на
механической характеристике, определяемой
прямой 0зад-в,
имеющей жесткость ,
и просадка скорости определяется
в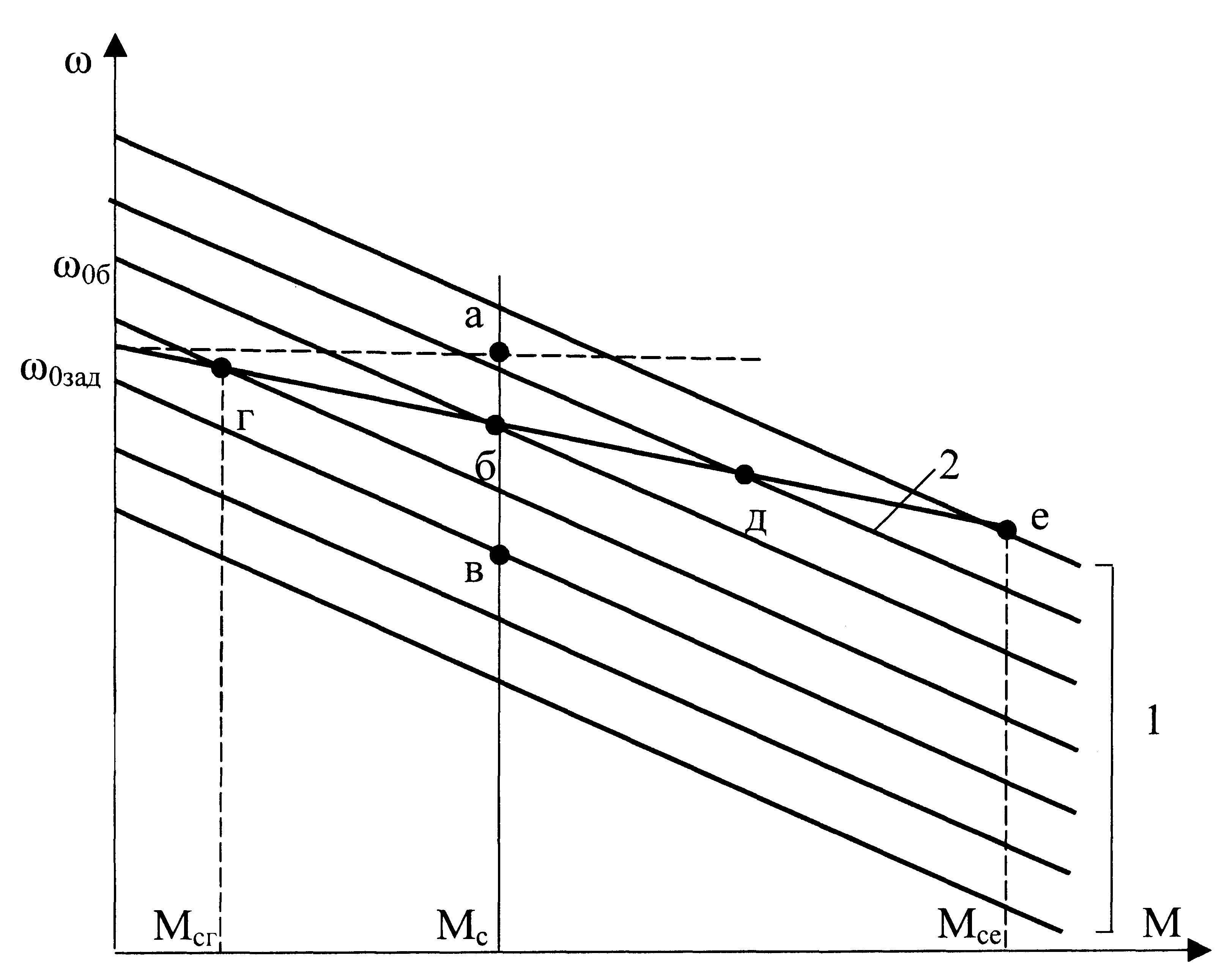 еличиной
еличиной![]() .
.
В
Рис.5.5.
Пояснения действия отрицательной
обратной связи по скорости![]() ,
определяемую отрезкомаб,
существенно меньшим, чем это было бы в
разомкнутой системе
,
определяемую отрезкомаб,
существенно меньшим, чем это было бы в
разомкнутой системе
![]() .
(5.10)
.
(5.10)
Если статический момент равен Мсг, то привод будет работать в точке г, если Мс=Мсе, то привод будет работать в точке е.
Мы видим, что механическая характеристика замкнутой системы представляет собой совокупность точек 0зад-г-б-д-е, принадлежащих механическим характеристикам разомкнутой системы с различными значениями скорости холостого хода. Жесткость механической характеристики замкнутой системы (прямая 2) будет выше жесткости характеристик разомкнутой системы, как это следует из (5.8).
Как следует из структурной схемы (см.рис.5.4), передаточная функция электропривода по управлению будет:
 .
(5.11)
.
(5.11)
Передаточная
функция по возмущению по нагрузке
выражается формулой (5.6). Как следует из
этих выражений, использование отрицательной
обратной связи по скорости позволяет
повысить быстродействие электропривода
при изменении сигнала управления и при
отработке возмущающего воздействия.
Это следует из того, что электромеханическая
постоянная времени ТМ,
характеризующая инерционность
механической части электропривода,
уменьшается в (К+1)
раз, т.е.
![]() .
.
Это
очень важное свойство - повышение
быстродействия привода - которое дает
отрицательная обратная связь по
скорости, сопряжено с существенным
недостатком - возрастанием колебательности
привода. Выше (см.§3.4) было показано, что,
если![]() ,
то переходные процессы в приводе носят
экспоненциальный характер без колебаний.
Если же
,
то переходные процессы в приводе носят
экспоненциальный характер без колебаний.
Если же![]() ,
то переходный процесс носит колебательный
характер с частотой и декрементом
затухания, определяемыми формулами
(3.13).
,
то переходный процесс носит колебательный
характер с частотой и декрементом
затухания, определяемыми формулами
(3.13).
Обычно электромеханическая постоянная времени ТМ больше, чем 4Тэ, и в разомкнутой системе регулирования скорости колебания не наблюдаются. Введение отрицательной обратной связи по скорости уменьшает эквивалентную электромеханическую постоянную времени ТМэкв, причем, чем больше коэффициент обратной связи по скорости кс, тем меньше ТМэкв. Поэтому в замкнутых системах при использовании отрицательной обратной связи по скорости ТМэкв становится меньше 4Тэ, и переходные процессы в системе приобретают колебательный характер.
Таким образом, введение отрицательной обратной связи по скорости повышает жесткость механических характеристик привода, уменьшает статическую ошибку, расширяет диапазон регулирования скорости, повышает быстродействие привода, но ведет к колебательности переходных процессов. Для снижения колебательности в систему регулирования вводят корректирующие динамические звенья. Способы формирования переходных процессов требуемого характера рассмотрены в разделе II.