

Глава 16. Типовые системы управления асинхронными частотно-регулируемыми электроприводами
16.1. Общие положения
Универсальные регулируемые электроприводы переменного тока обычно строятся на базе асинхронных двигателей с короткозамкнутым ротором с частотным управлением. При этом в качестве источников питания применяются полупроводниковые преобразователи частоты, работающие в режиме источника напряжения (ПЧН) или источники тока (ПЧТ).
Целесообразный способ управления двигателем зависит от технических требований к системе электропривода. В электроприводах с ограниченным диапазоном регулирования и отсутствием динамических режимов работы применяется частотно-параметрический способ, при котором принудительно регулируется частота и действующее значение выходного напряжения ПЧН в соответствии с заданной скоростью.
В электроприводах с ограниченным диапазоном регулирования, к которым предъявляются высокие требования к динамическим режимам, применяется частотно-токовый способ, при котором принудительно регулируется частота и действующее значение выходного тока ПЧТ в зависимости от абсолютного скольжения двигателя при заданной скорости и действующей нагрузке.
В электроприводах с большим диапазоном регулирования скорости и высокими требованиями к динамическим характеристикам применяется регулирование мгновенных значений трехфазной системы питающих напряжений и токов с использованием векторного принципа регулирования.
16.2. Асинхронные электроприводы с частотно-параметрическим регулированием скорости
Наиболее
простыми системами частотного
регулирования являются частотно-параметрические
системы. Такие системы обеспечивают
диапазон регулирования скорости до
D=10:1
при статизме по моменту SM=5-10%.
Обычно это разомкнутые по скорости
системы частотного регулирования, у
которых желаемое семейство механических
характеристик асинхронного двигателя
реализуется за счет формирования
регулировочной характеристики
преобразователя частоты – отношение
амплитуды питающего напряжения к частоте
![]() .
.
Ф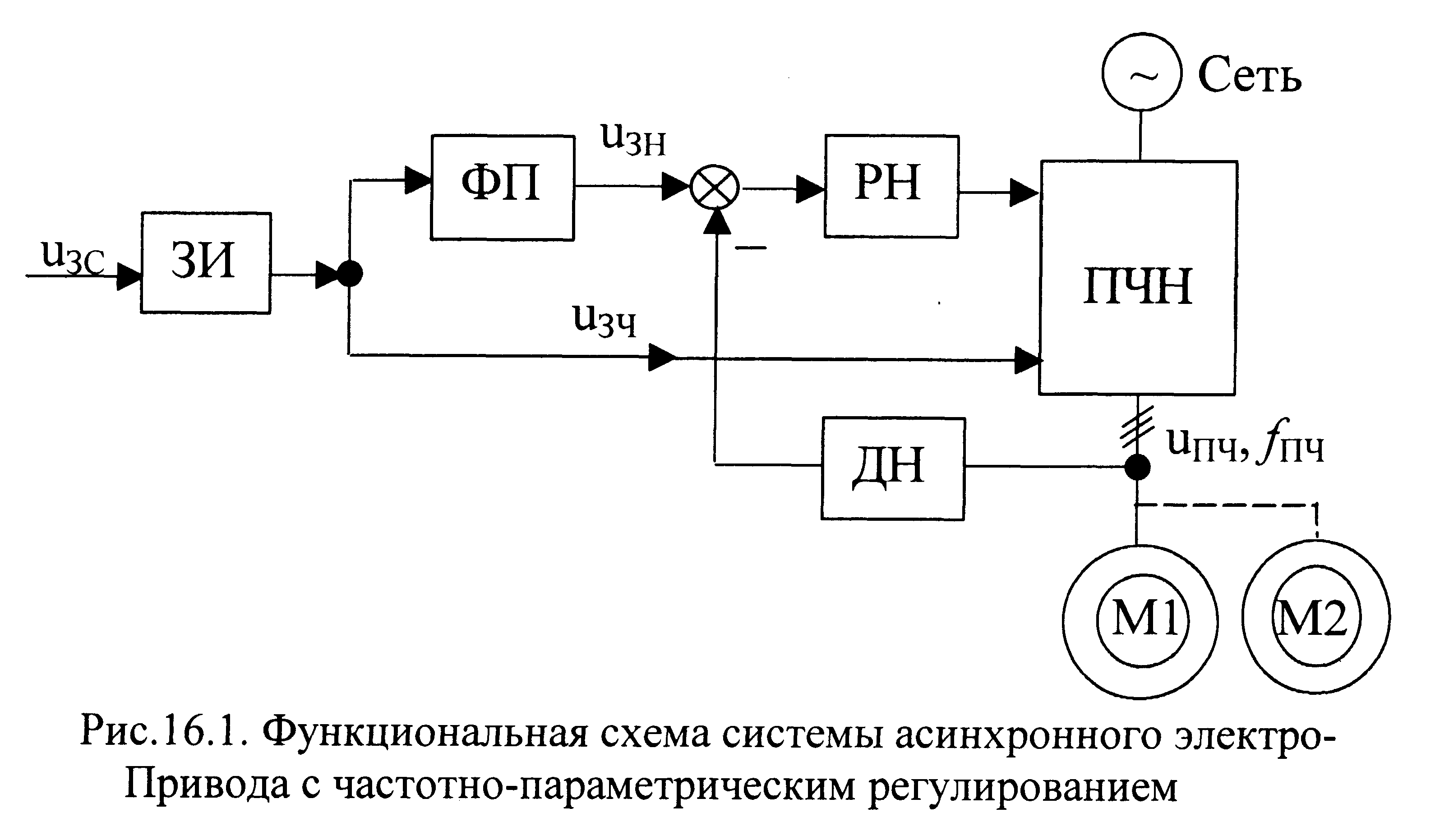 ункциональная
схема такой системы электропривода
приведена на рис.16.1. ЧастотаfПЧ
определяется величиной задаваемой
скорости ωз.
Канал регулирования частоты преобразователя
выпол-няется с линейной регу-лировочной
характе-ристикой fПЧ(uзс).
В ка-нал регулирования на-пряжения
включается функциональный пре-образователь
ФП, кото-рый обеспечивает требуемое
соотношение между частотой и напряжением
Gωз.
При этом желательно предусмотреть
отрицательную обратную связь по выходному
напряжению UПЧ,
чтобы преобразователь частоты обладал
свойством источника напряжения. Это
позволяет достаточно точно выполнять
требуемый закон регулирования Gωз.
Наиболее часто встречающиеся законы
регулирования рассмотрены в §10.1.
ункциональная
схема такой системы электропривода
приведена на рис.16.1. ЧастотаfПЧ
определяется величиной задаваемой
скорости ωз.
Канал регулирования частоты преобразователя
выпол-няется с линейной регу-лировочной
характе-ристикой fПЧ(uзс).
В ка-нал регулирования на-пряжения
включается функциональный пре-образователь
ФП, кото-рый обеспечивает требуемое
соотношение между частотой и напряжением
Gωз.
При этом желательно предусмотреть
отрицательную обратную связь по выходному
напряжению UПЧ,
чтобы преобразователь частоты обладал
свойством источника напряжения. Это
позволяет достаточно точно выполнять
требуемый закон регулирования Gωз.
Наиболее часто встречающиеся законы
регулирования рассмотрены в §10.1.
Электроприводы с частотно-параметрическим регулированием скорости примечаются в технологических установках, работающих в продолжительном режиме с относительно медленным изменением скорости. Такие системы целесообразно также применять, если по технологии требуется одновременное регулирование скорости группы однотипных электроприводов, например, рольгангов с индивидуальными приводами роликов. В этом случае преобразователь частоты является общим источником питания для группы приводов.