

Момент, развиваемый двигателем, пропорционален току якоря и потоку возбуждения
![]() . (6.3)
. (6.3)
Из
уравнений (6.1) и (6.2) легко получить
зависимость скорости от тока якоря
![]() ,
которая называется электромеханической
характеристикой двигателя
,
которая называется электромеханической
характеристикой двигателя
![]() . (6.4)
. (6.4)
Подставляя в (6.4) значения тока якоря из (6.3), получим уравнение механической характеристики двигателя
![]() . (6.5)
. (6.5)
Если двигатель во всех режимах работает с постоянным потоком возбуждения, то величину кФ считают постоянной
![]() . (6.6)
. (6.6)
Тогда уравнения (6.2), (6.4) и (6.5) будут иметь вид:
![]() (6.7)
(6.7)
![]() (6.8)
(6.8)
![]() (6.9)
(6.9)
Строго говоря, при изменении нагрузки на валу, когда изменяется ток якоря, поток двигателя вследствие размагничивающего влияния реакции якоря не остается постоянным. Для устранения влияния тока в цепи якоря на поток возбуждения на крупных машинах используют компенсационную обмотку, которая включается последовательно с обмоткой якоря и располагается на полюсах машины, усиливая поток возбуждения. Однако и для некомпенсированных машин в инженерных расчетах обычно пренебрегают размагничивающим действием реакции якоря, возлагая обеспечение линейности механической характеристики двигателя на замкнутые системы регулирования. В двигателях с возбуждением от постоянных магнитов реакция якоря практически не проявляется. Для более точного учета влияния реакции якоря на механические характеристики рекомендуем обратиться к [1-3].
Естественная механическая характеристика двигателя постоянного тока независимого возбуждения показана на рис.6.2.
Жесткость естественной механической характеристики β для рассматриваемых двигателей обычно высока и равна
![]() .
(6.10)
.
(6.10)
З аметим,
что в уравнениях (6.4), (6.5), (6.8), (6.9) члены
аметим,
что в уравнениях (6.4), (6.5), (6.8), (6.9) члены![]() и
и![]() равны скорости холостого хода двигателяω0.
С учетом (6.10) получим удобное выражение
для механической характеристики при
постоянном потоке возбуждения
равны скорости холостого хода двигателяω0.
С учетом (6.10) получим удобное выражение
для механической характеристики при
постоянном потоке возбуждения
![]() .
(6.11)
.
(6.11)
Регулирование скорости двигателя постоянного тока независимого возбуждения может производиться тремя способами:
Введением добавочного сопротивления в цепь якоря.
Изменением величины напряжения, питающего якорную цепь двигателя, при постоянном потоке возбуждения.
Изменением тока возбуждения, т.е. изменением магнитного потока двигателя.
П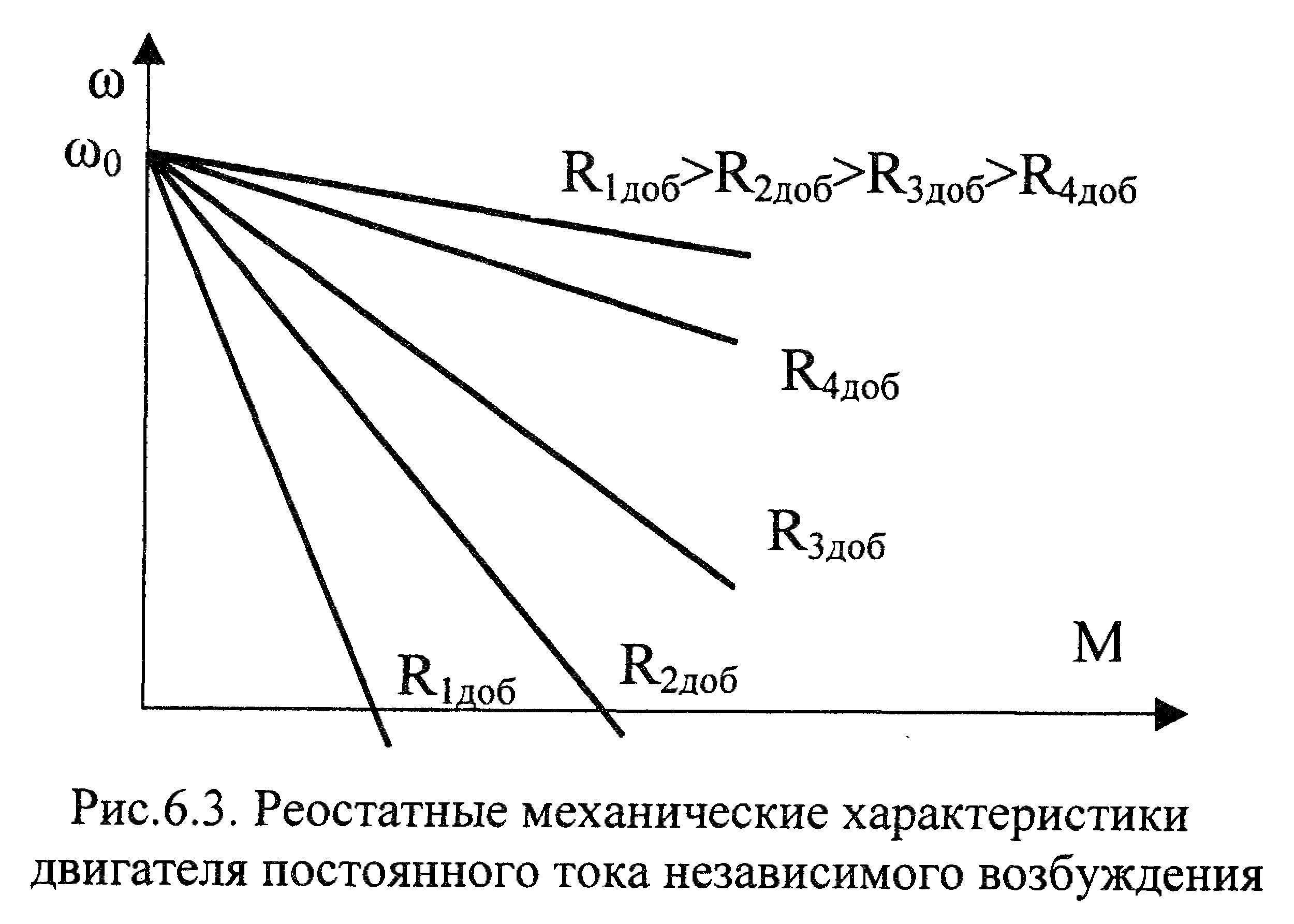 ри
вводе добавочного сопротивления в цепь
якоря скорость холостого ходаω0
остается
неизменной, а изменяется наклон
механических харак-теристик, т.е.
умень-шается их жесткость (см.рис.6.3).
Данный способ регулирова-ния скорости
в настоящее время не используется,
поско-льку введение доба-вочного
сопротивле-ния сопряжено с потерями
энергии в этом сопротивлении.
ри
вводе добавочного сопротивления в цепь
якоря скорость холостого ходаω0
остается
неизменной, а изменяется наклон
механических харак-теристик, т.е.
умень-шается их жесткость (см.рис.6.3).
Данный способ регулирова-ния скорости
в настоящее время не используется,
поско-льку введение доба-вочного
сопротивле-ния сопряжено с потерями
энергии в этом сопротивлении.
Основным способом регулирования скорости двигателей постоянного тока независимого возбуждения является регулирование напряжения, подводимого к якорю двигателя.
И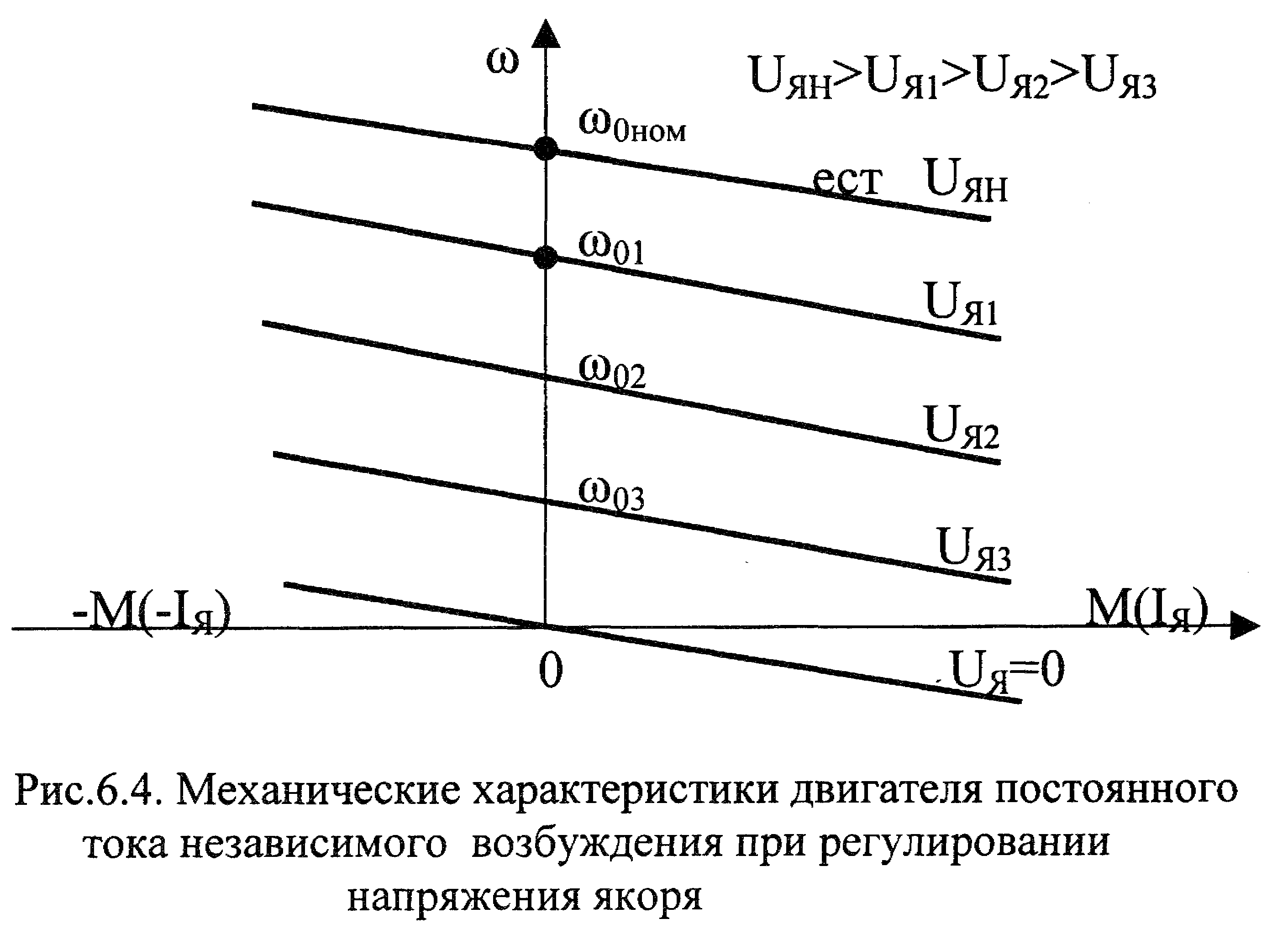 зменение
скорости при этом произво-дится вниз
от основной (но-минальной) ско-рости,
опреде-ляемой естест-венной харак-теристикой
(рис.6.4). Повы-шение напря-жения питания
выше номина-льного, как пра-вило, не
рекомендуется, т.к. это может ухудшить
коммутацию на коллекторе.
зменение
скорости при этом произво-дится вниз
от основной (но-минальной) ско-рости,
опреде-ляемой естест-венной харак-теристикой
(рис.6.4). Повы-шение напря-жения питания
выше номина-льного, как пра-вило, не
рекомендуется, т.к. это может ухудшить
коммутацию на коллекторе.
При уменьшении напряжения якоря уменьшается скорость холостого хода ω0, а жесткость механических характеристик остается постоянной. Плавность регулирования, отсутствие дополнительных потерь энергии при регулировании и высокая жесткость механических характеристик составляют основные достоинства этого способа регулирования скорости.
Регулирование скорости выше основной производится уменьшением тока (потока) возбуждения (см.рис.6.5). При уменьшении магнитного потока Ф согласно (6.5) происходит увеличение скорости холостого хода ω0 и одновременно снижается жесткость механических характеристик двигателя (см.рис.6.5а).
Увеличение
тока возбуждения выше номинального
нецелесообразно, так как вследствие
насыщения магнитной цепи машины
существенного возрастания магнитного
потока не произойдет, а тепловой режим
двигателя нарушится. Электромеханические
характеристики двигателя при ослаблении
поля
![]() будут иметь вид, показанный на рис.6.5б.
Эти характеристики, как следует из
(6.4), на оси абсцисс сходятся в одной
точке, соответствующей току короткого
замыкания
будут иметь вид, показанный на рис.6.5б.
Эти характеристики, как следует из
(6.4), на оси абсцисс сходятся в одной
точке, соответствующей току короткого
замыкания![]() .
Заметим, что масштаб по оси абсцисс на
рис.6.5а и 6.5б различен.
.
Заметим, что масштаб по оси абсцисс на
рис.6.5а и 6.5б различен.
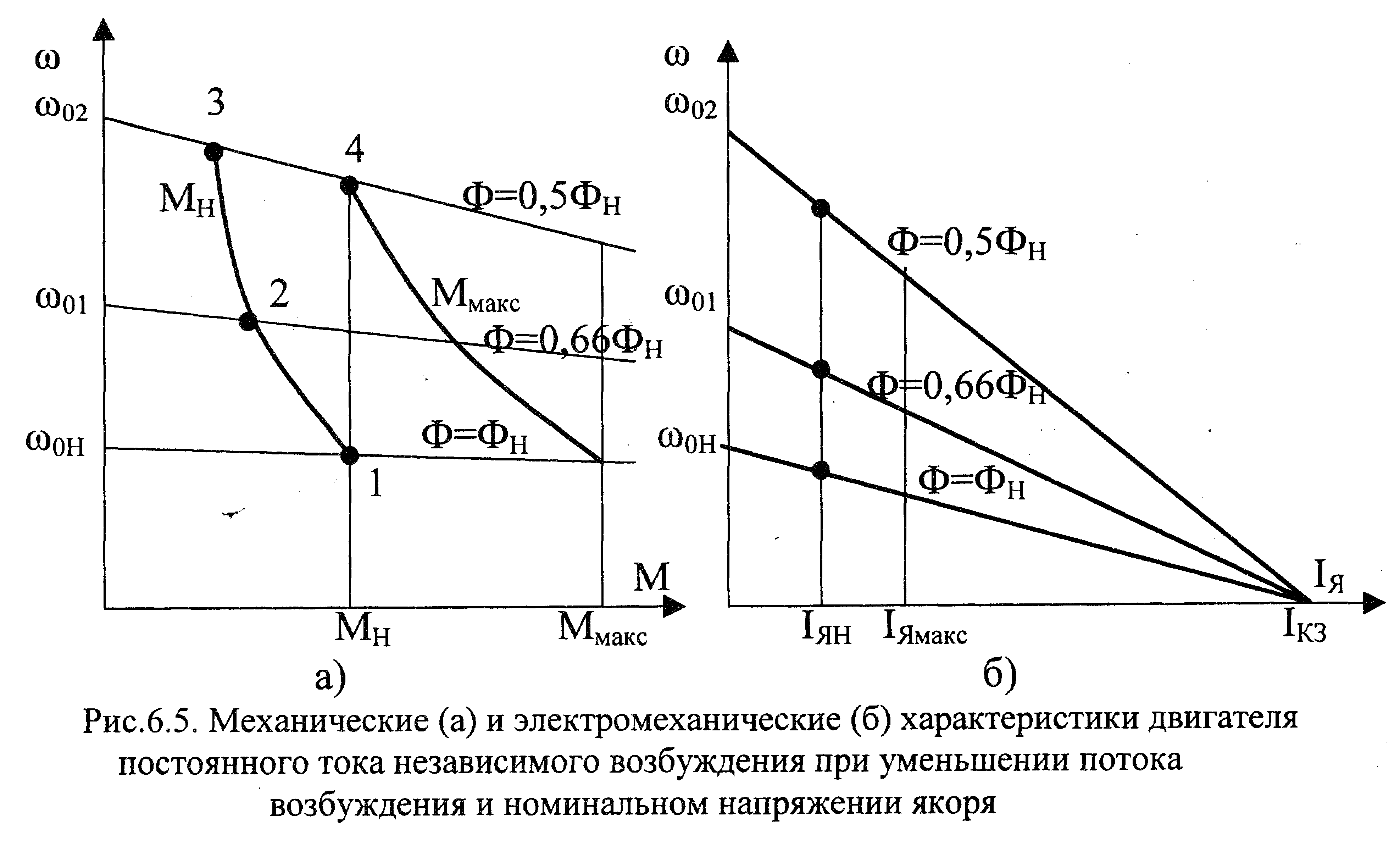
При
анализе механических характеристик
при ослаблении поля следует иметь в
виду, что при работе с постоянным
статическим моментом ток якоря по мере
ослабления потока увеличивается. Так,
если статический момент на валу двигателя
будет равен номинальному, то при
номинальном напряжении якоря Uян
двигатель
будет работать в т.1 (см.рис.6.5а). Если,
например, ослабить поток возбуждения
в 2 раза, то скорость холостого хода
двигателя ω02
увеличивается в 2 раза. Если момент
двигателя сохранится постоянным и
равным номинальному, то двигатель будет
работать в т.4. Однако, как это следует
из (6.3) ток якоря при этом увеличится в
2 раза. Поэтому длительная работа
двигателя в т.4 недопустима. Из этого
примера следует, что одновременно с
повышением скорости необходимо снижать
длительно допустимый по условия нагрева
(номинальный) момент. Линия номинального
момента при ослаблении поля отображается
кривой 1-2-3. Аналогично при ослаблении
поля уменьшается допустимый максимальный
момент, определяемый по условиям
коммутации на коллекторе. Поскольку
при ослаблении поля скорость увеличивается
примерно пропорционально степени
ослабления поля
![]() ,
а длительно допустимый момент уменьшается
пропорционально отношению
,
а длительно допустимый момент уменьшается
пропорционально отношению![]() ,
то мощность двигателя
,
то мощность двигателя![]() остается примерно постоянной. Поэтому
регулирование ослаблением поля называют
регулированием с постоянной мощностью
в отличие от регулирования изменением
напряжения якоря при постоянном потоке
возбуждения, которое называют
регулированием с постоянным моментом.
остается примерно постоянной. Поэтому
регулирование ослаблением поля называют
регулированием с постоянной мощностью
в отличие от регулирования изменением
напряжения якоря при постоянном потоке
возбуждения, которое называют
регулированием с постоянным моментом.
Д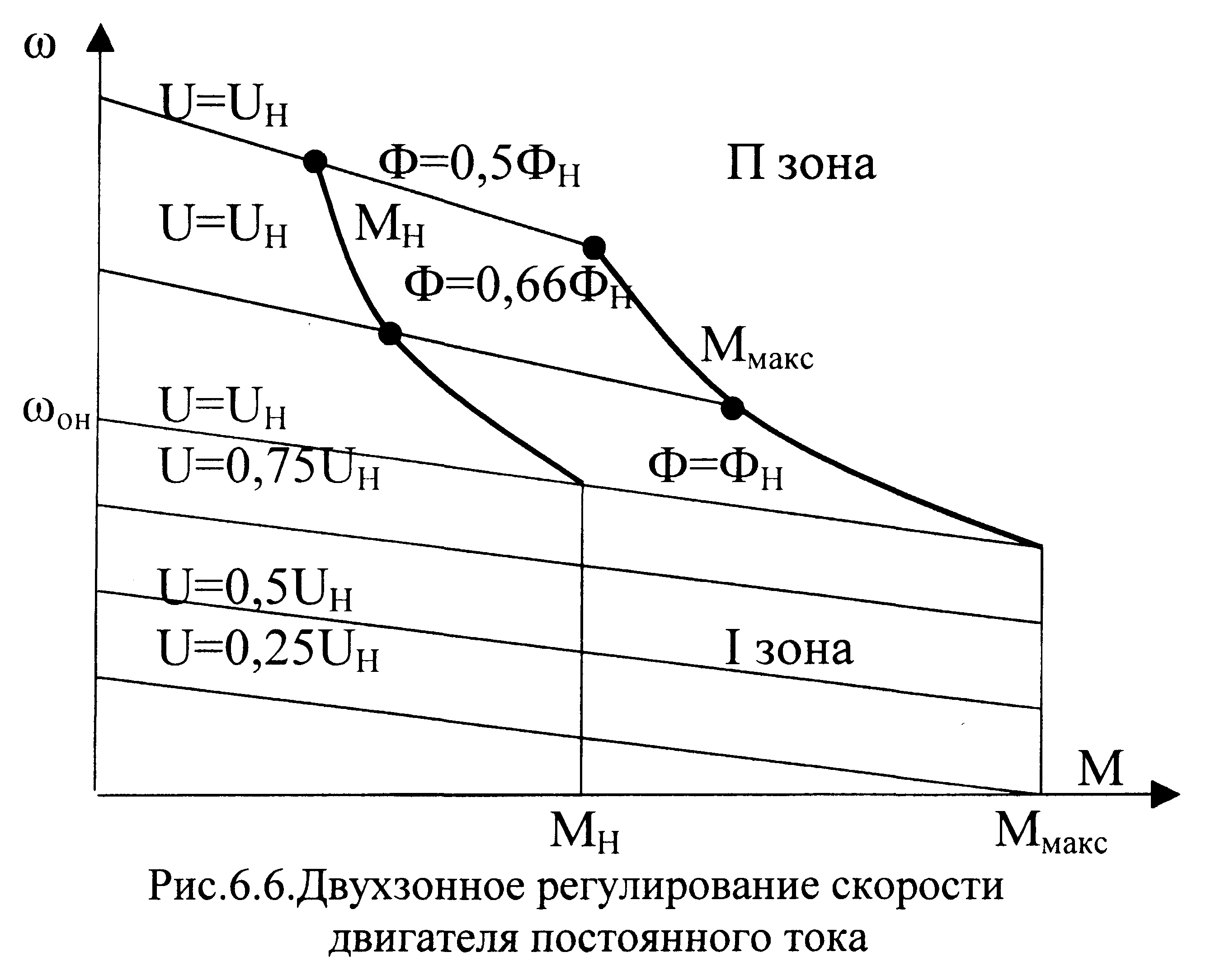 ля
электроприводов многих механизмов
используют комбинированное управление,
так называемое двух-зонное регулирование
скорости. Механи-ческие характеристи-ки
для этого способа управления показаны
на рис.6.6. В первой зоне скорость двига-теля
в диапазоне от нуля до основной скоростиω0н
регули-руется изменением напряжения
якоря при постоянном потоке возбуждения
Фн.
Во второй зоне регулирование производится
изменением тока (потока) возбуждения
при постоянном номинальном напряжении
якоря. Соответственно номинальный
момент в первой зоне регулирования
остается постоянным, а во второй зоне
снижается пропорционально уменьшению
потока. Максимально допустимая скорость
двигателя при ослаблении поля определяется
механической прочностью якоря и условиями
коммутации на коллекторе. Эта скорость
указывается в каталоге на двигатели.
ля
электроприводов многих механизмов
используют комбинированное управление,
так называемое двух-зонное регулирование
скорости. Механи-ческие характеристи-ки
для этого способа управления показаны
на рис.6.6. В первой зоне скорость двига-теля
в диапазоне от нуля до основной скоростиω0н
регули-руется изменением напряжения
якоря при постоянном потоке возбуждения
Фн.
Во второй зоне регулирование производится
изменением тока (потока) возбуждения
при постоянном номинальном напряжении
якоря. Соответственно номинальный
момент в первой зоне регулирования
остается постоянным, а во второй зоне
снижается пропорционально уменьшению
потока. Максимально допустимая скорость
двигателя при ослаблении поля определяется
механической прочностью якоря и условиями
коммутации на коллекторе. Эта скорость
указывается в каталоге на двигатели.
Ослабление поля используется и при однозонном регулировании скорости для установления основной (максимальной) скорости. В отличие от синхронных и асинхронных двигатели постоянного тока не имеют жестко определенной номинальной скорости. В каталогах указывается номинальная и максимальная скорости. Например, если указано, что двигатель мощностью 100кВт имеет номинальную скорость 1000об/мин и максимальную – 2000об/мин, то основная скорость может быть установлена в этих пределах выбором соответствующего значения тока возбуждения. Например, - 1600об/мин; при этом мощность двигателя останется равной 100кВт. Это удобно при конструировании кинематической схемы рабочей машины.
Для высокодинамичных электроприводов небольшой мощности (до 20кВт) эффективно использование высокомоментных двигателей постоянного тока с возбуждением от постоянных магнитов. Благодаря применению высокоэнергетических постоянных магнитов на основе редкоземельных элементов (например, сплава самарий-кобальт) эти двигатели особенно при малых скоростях вращения (когда условия коммутации тока на коллекторе более легкие) способны развивать большой крутящий момент. Отношение пускового момента такого двигателя к номинальному составляет 10-12, в то время как у двигателей с электромагнитным возбуждением это отношение не превышает 2-4. Такие двигатели находят применение в металлорежущих станках с числовым программным управлением, в приводах роботов и следящих электроприводах различного назначения [1-9].
В некоторых случаях двигатели независимого возбуждения снабжают «легкой» обмоткой последовательного возбуждения, создающей м.д.с. при номинальном токе якоря около 20% от м.д.с. обмотки независимого возбуждения. Такие двигатели смешанного возбуждения применяются в случаях многодвигательного привода, когда два или несколько двигателей работают на один вал или их валы связаны механически (например, лентой конвейера), В этом случае скорость всех двигателей будет одинаковой, но из-за неидентичности характеристик двигателя возникает задача равномерного распределения нагрузки между ними. Благодаря наличию последовательной обмотки возбуждения в более нагруженном двигателе увеличивается поток и возрастает противоэдс якоря, что ведет к снижению тока якоря. Напротив, менее нагруженный двигатель будет иметь несколько меньший поток, его э.д.с. будет ниже и ток якоря соответственно возрастает. Таким образом, благодаря наличию слабой последовательной обмотки происходит выравнивание тока якоря между двигателями, питающимися от общего источника напряжения.
Электродвигатели постоянного тока независимого возбуждения могут работать в трех тормозных режимах: режиме рекуперативного торможения, динамического торможения и торможения противовключением.
Режим рекуперативного генераторного торможения отражается на механических характеристиках во втором квандранте, когда скорость двигателя превышает скорость холостого хода ω>ω0 (рис.6.7). При этом э.д.с. якоря Ея превышает величину напряжения питания якорной цепи Ея>Uя и ток в якорной цепи пойдет под действием э.д.с. якоря Ея; знак тока будет противоположен знаку напряжения питания, что означает, что энергия торможения отдается в сеть питания постоянного тока. Отсюда следуют три условия существования режима рекуперативного торможения.
Ц

Рис.6.7. Механические характеристики двигателя постоянного тока в режиме рекуперативного торможения
епь питания должна обеспечивать возможность протекания тока встречно напряжению источ-ника питания; это условие особенно важно в случае пита-ния двигателя пос-тоянного тока от полупроводниковых преобразователей, элементы которых обладают односторонней проводимостью тока (см.§6.2).Источник питания должен обладать возможностью воспринимать отдаваемую двигателем энергию и передавать ее в питающую сеть; так режим рекуперативного торможения невозможен, если привод получает питание от автономной дизель-генераторной установки.
Для того, чтобы рекуперативное торможение было возможно в пределах заданного диапазона регулирования скорости, для регулирования должен применяться способ изменения напряжения, подводимого к якорной цепи двигателя.
В режиме рекуперативного торможения уравнения (6.1) и (6.5) принимают вид:

Основными достоинствами рекуперативного торможения являются: энергетическая эффективность, связанная с полезным использованием энергии торможения, высокая жесткость механических характеристик, плавный переход из двигательного в тормозной режим на одной и той же характеристике. Благодаря такому характеру механических характеристик улучшается качество управления приводом. Вернемся к рассмотрению рис.6.7. Пусть двигатель работал в т.1 в двигательном режиме со статическим моментом Мс. Если оператор хочет уменьшить скорость, он уменьшает напряжение источника питания с Uя1 до Uя2. В первый момент скорость двигателя из-за механической инерции не может измениться, и двигатель переходит на работу в т.2. При этом на валу двигателя возникает тормозной момент, равный сумме тормозного момента двигателя и статического момента. Скорость двигателя быстро снижается до скорости ω02 и далее под действием статического момента до скорости, определяемой т.3.
В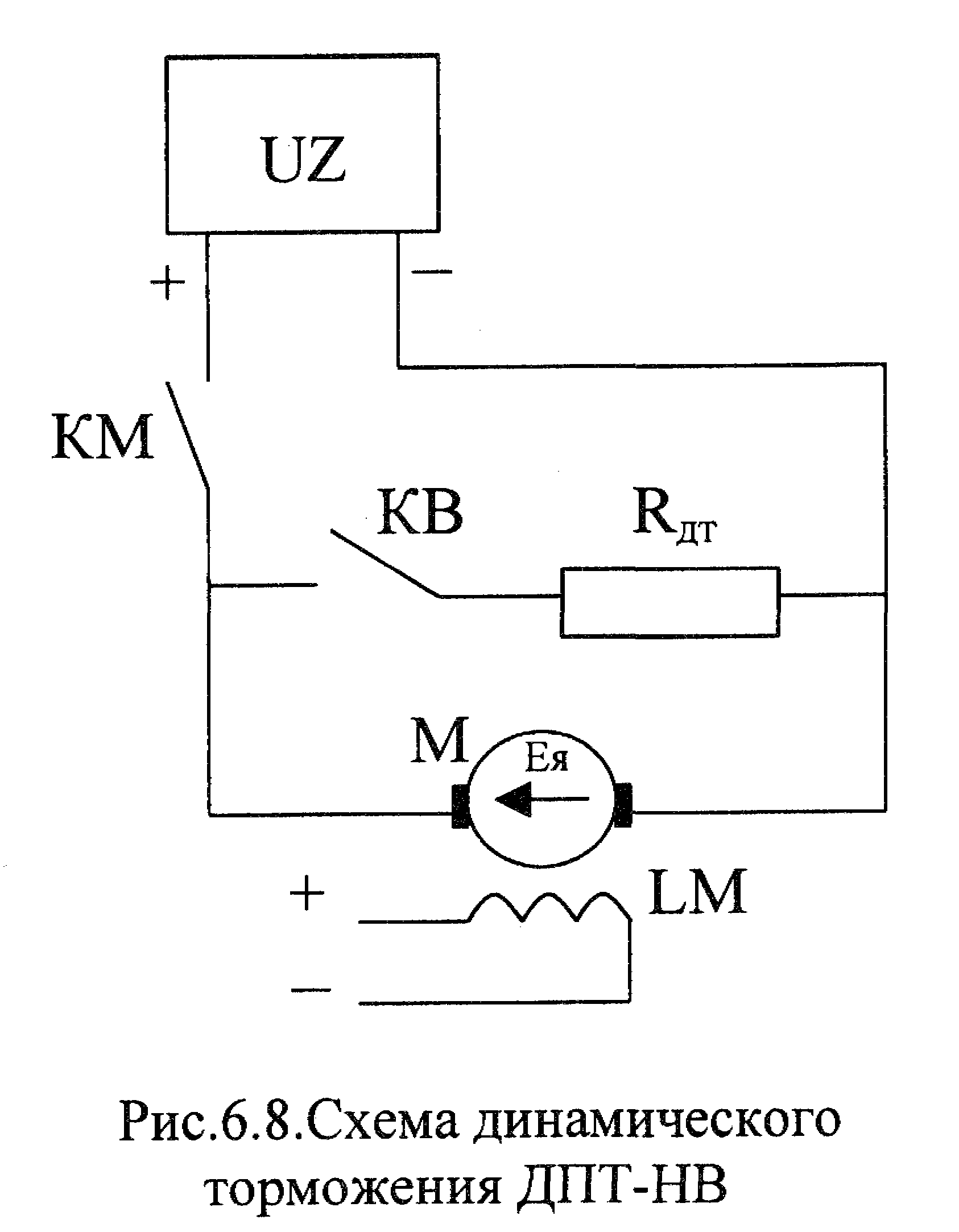
 торым
возможным тормозным режимом является
режим динамического торможения. В этом
режиме якорь двигателя отключается от
источника постоянного тока (см.рис.6.8)
и замыкается на сопротивление динамического
торможения. Питание обмотки возбуждения
при этом должно быть обязательно
сохранено. В указанном режиме двигательМ
работает как генератор постоянного
тока, нагруженный на сопротивление Rдт.
Энергия торможения расходуется на
нагрев сопротивления Rдт
и обмоток цепи якоря двигателя.
торым
возможным тормозным режимом является
режим динамического торможения. В этом
режиме якорь двигателя отключается от
источника постоянного тока (см.рис.6.8)
и замыкается на сопротивление динамического
торможения. Питание обмотки возбуждения
при этом должно быть обязательно
сохранено. В указанном режиме двигательМ
работает как генератор постоянного
тока, нагруженный на сопротивление Rдт.
Энергия торможения расходуется на
нагрев сопротивления Rдт
и обмоток цепи якоря двигателя.
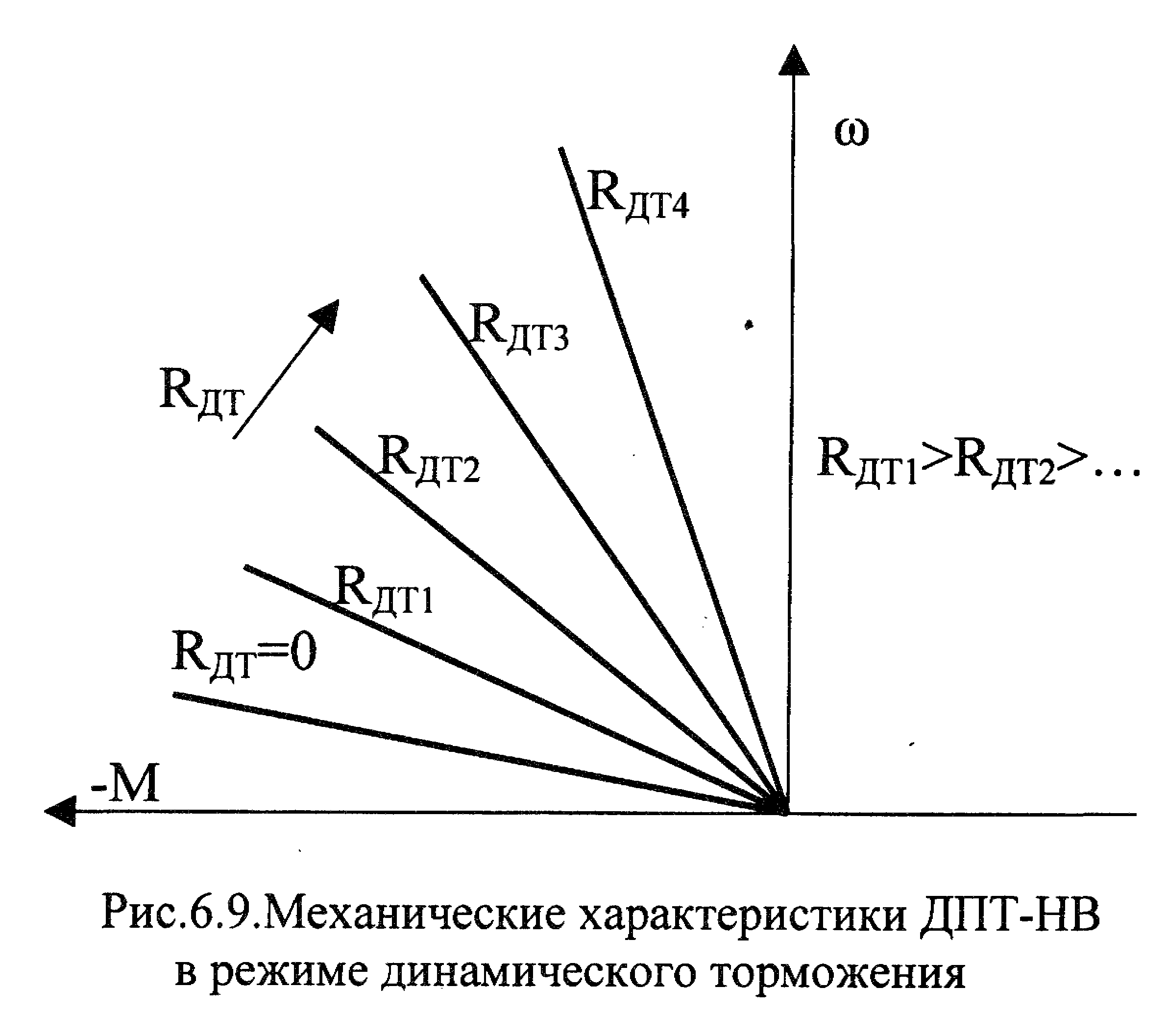
Механические
характеристики при динамическом
торможении представлены на рис.6.9. Если
Rдт=0,
якорная цепь двигателя будет замкнута
накоротко и механическая характеристика
(при Ф=Фн)
будет иметь жесткость естественной
характеристики (см.6.10). При увеличении
Rдт
жесткость характеристик будет уменьшаться
в соотношении
![]() ,
и механические характеристики будут
линейными и расходиться веером из начала
координат.
,
и механические характеристики будут
линейными и расходиться веером из начала
координат.
Как следует из (6.5), при UЯ=0 уравнение механических характеристик динамического торможения будет:
![]() .
.
Недостатками режима динамического торможения являются: потери энергии торможения, расходуемой на нагрев элементов привода, и невозможность торможения привода до полной его остановки.
Достоинством режима динамического торможения является его высокая надежность, определяемая тем, что этот режим может осуществляться при исчезновении питающего напряжения и в случае выхода из строя источника питания цепи якоря, когда режим рекуперативного торможения становится невозможен. Исходя из этого, динамическое торможение в приводах постоянного тока часто используется в качестве средства аварийного торможения.
Торможение противовключением не характерно для двигателей постоянного тока независимого возбуждения. Этот режим может использоваться в приводах малой мощности с широтно-импульсными регуляторами тока, позволяющими ограничить ток торможения допустимой величиной.
6.2. Электроприводы по системе тиристорный преобразователь-двигатель постоянного тока
Для питания двигателей постоянного тока независимого возбуждения используются регулируемые источники питания:
электромашинные агрегаты – генератор постоянного тока – двигатель переменного тока (система Г-Д);
тиристорные преобразователи (выпрямители) с фазовым управлением (система ТП-Д);
полупроводниковые выпрямители с регулированием величины выпрямленного напряжения методом широтно-импульсного регулирования (ШИР-Д).
Система генератор-двигатель, в которой двигатель постоянного тока получает питание от электромашинного агрегата, в настоящее время морально устарела и в стационарных установках не применяется. Система Г-Д продолжает использоваться для мобильных установок, например экскаваторов.
Основной
системой регулируемого электропривода
с двигателями постоянного тока является
система ТП-Д (тиристорный преобразователь
– двигатель постоянного тока), наиболее
р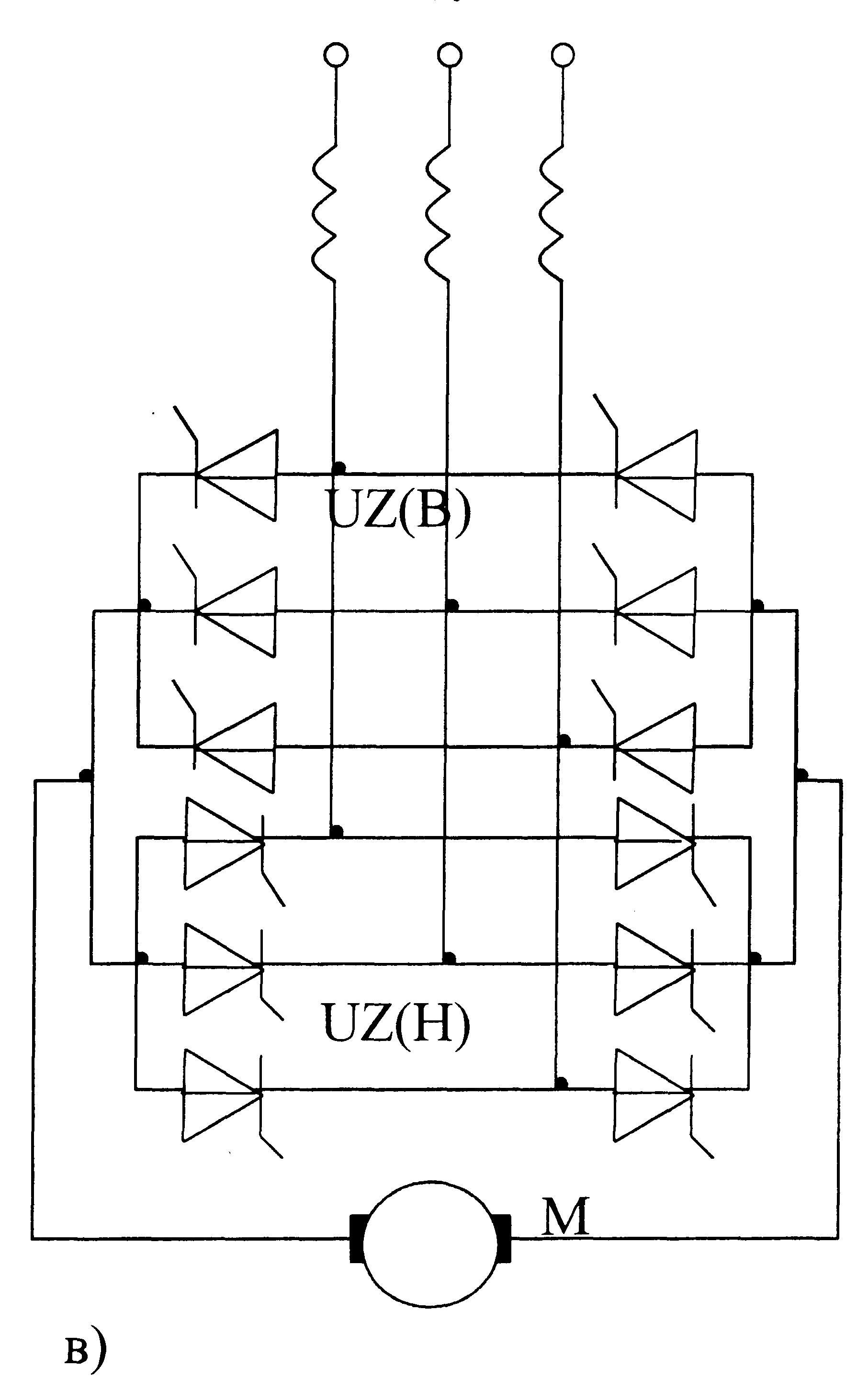 асп
асп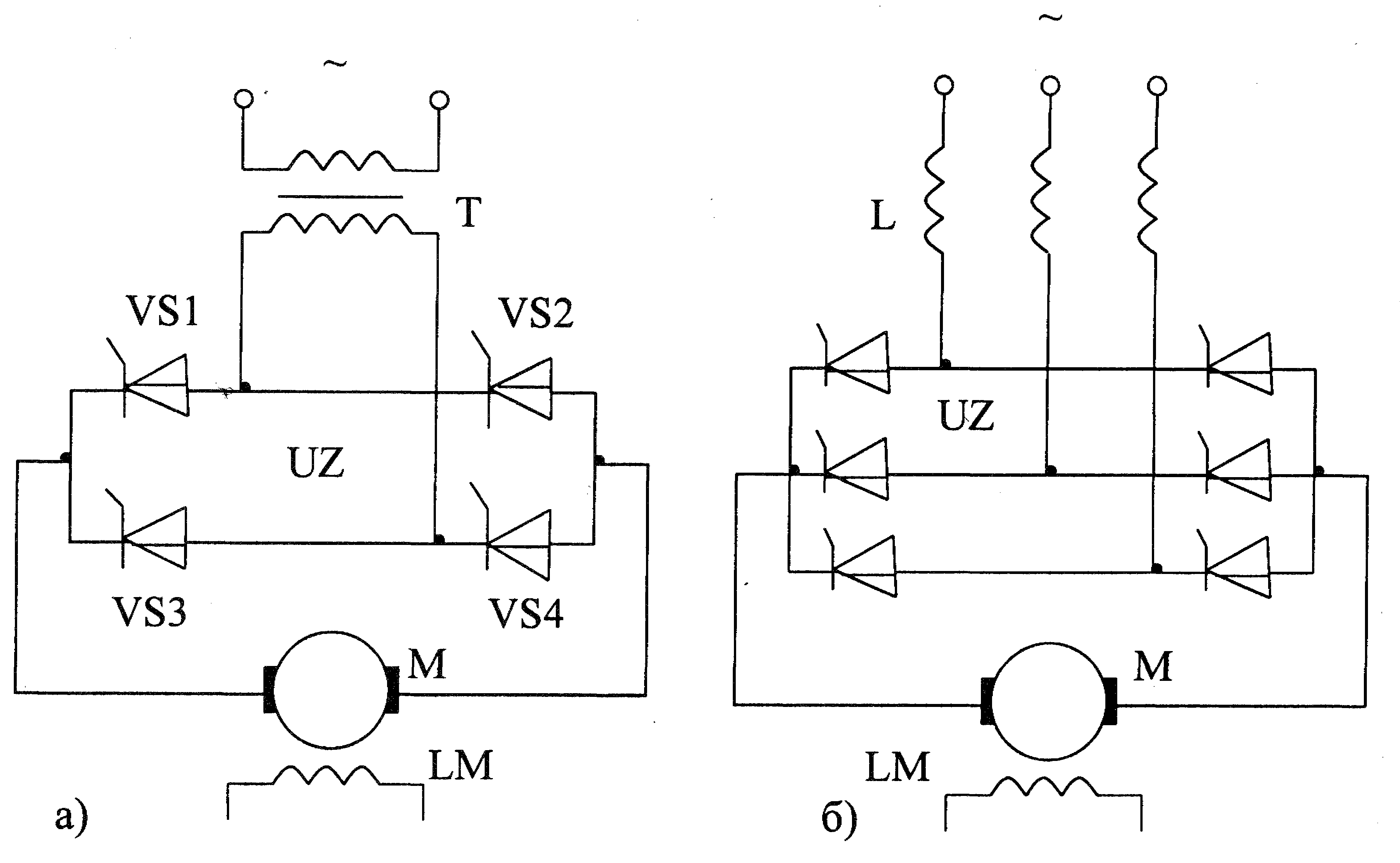 ространенные
схемы которой приведены на рис.6.10.
ространенные
схемы которой приведены на рис.6.10.
О
Рис.6.10.
Силовые схемы электроприводов ТП-Д а)
однофазная мостовая нереверсивная б)
трехфазная мостовая нереверсивная
схема в)
трехфазная мостовая встречно-параллельная
реверсивная схема с раздельным
управлением
Тиристорный преобразователь в схемах электропривода постоянного тока выполняет две функции: выпрямление переменного напряжения питающей сети и регулирование средней величины выпрямленного напряжения.
Принцип регулирования величины среднего значения выпрямленного напряжения тиристорного преобразователя с импульсно-фазовым управлением рассмотрим на примере однофазной мостовой схемы (рис.6.10а).
Если отпирающие импульсы на тиристоры VS1 и VS4 (и соответственно тиристоры VS3 и VS2 при другой полуволне синусоиды питающего напряжения) подаются в момент естественного открывания, когда напряжение катод-анод становится положительным, то среднее выпрямленное напряжение, определяемое заштрихованной площадью на рис.611а), будет максимальным и равным:
![]() ,
(6.12)
,
(6.12)
где Uл – линейное напряжение на стороне переменного тока;
ксх – коэффициент схемы выпрямления, который равен: для однофазной мостовой схемы – 0,9; для трехфазной мостовой схемы – 1,35; для трехфазной нулевой схемы – 0,675.
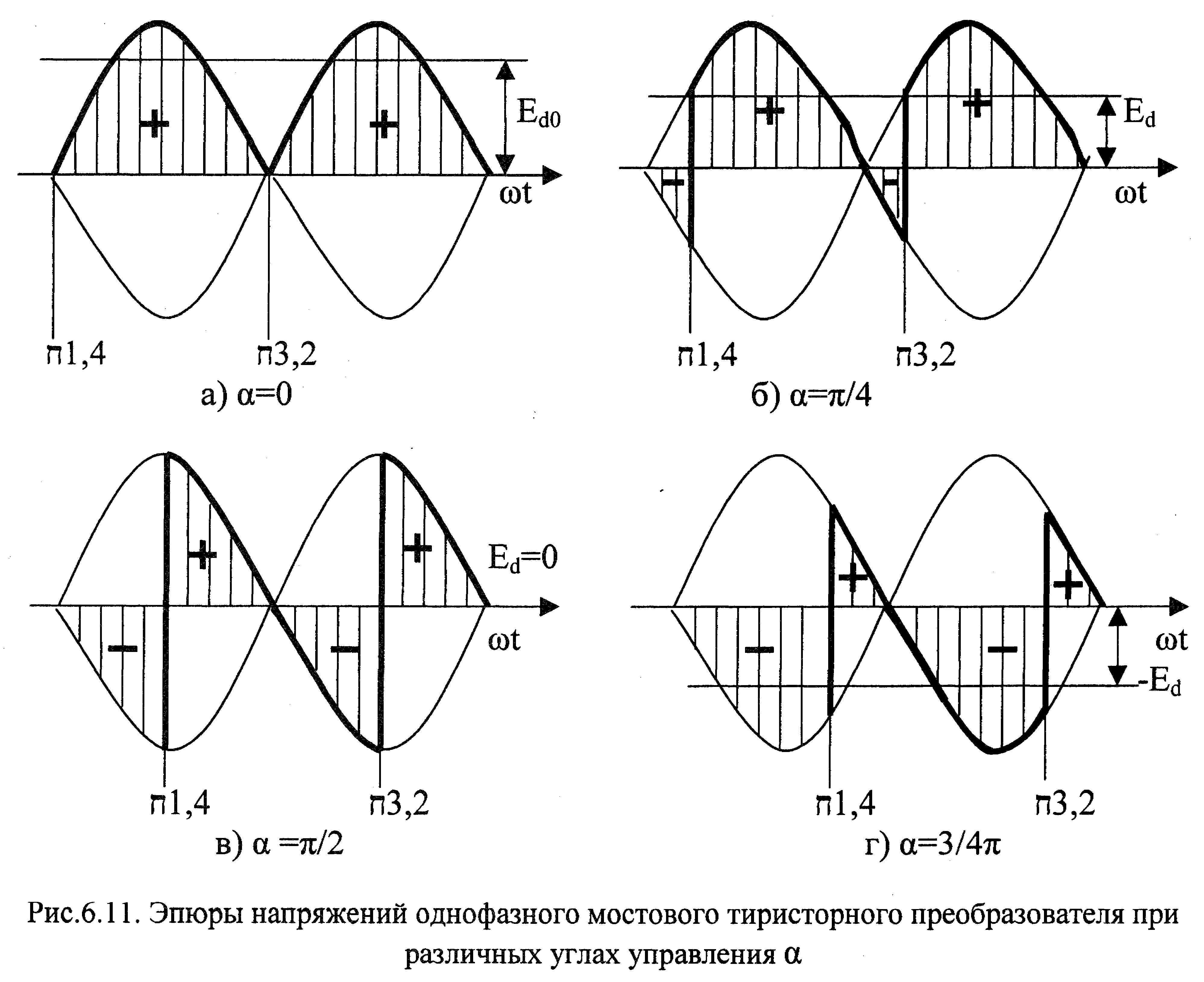
Если отпирающие импульсы на тиристоры будут подаваться с запаздыванием относительно момента естественного открывания на угол α (угол управления тиристорами), то среднее выпрямленное напряжение преобразователя будет уменьшаться, как это показано на рис.6.11б. При этом тиристоры VS1 и VS2 будут проводить ток до тех пор, пока не откроются тиристоры VS3 и VS4, т.е. и в то время, когда напряжение катод-анод будет отрицательным. Это объясняется тем, что в цепи выпрямленного тока имеется достаточно большая индуктивность обмотки якоря двигателя Lя , и ток будет протекать под действием э.д.с. самоиндукции. Если же в цепи выпрямленного тока не было бы индуктивности (чисто активная нагрузка), то ток прекратился бы при переходе анодного напряжения через нуль; ток в этом случае был бы прерывистым. При большом значении индуктивности Lя соотношение между средним выпрямленным напряжением преобразователя и углом α будет:
![]() (6.13)
(6.13)
Среднее
выпрямленное напряжение определяется
разностью заштрихованных площадей. При
значении угла регулирования
![]() среднее выпрямленное напряжение
(см.рис.6.11в) будет равно нулю.
среднее выпрямленное напряжение
(см.рис.6.11в) будет равно нулю.
Тиристорный
преобразователь может работать в
выпрямительном и в инверторном режимах.
Выпрямительный режим имеет место при
углах регулирования
![]() .
При этом среднее выпрямленное напряжение
должно быть больше эдс в цепи выпрямленного
тока (противоэдс якоря двигателя)
.
При этом среднее выпрямленное напряжение
должно быть больше эдс в цепи выпрямленного
тока (противоэдс якоря двигателя)![]() .
Направление выпрямленного тока совпадает
со знаком выпрямленного напряжения
преобразователя.
.
Направление выпрямленного тока совпадает
со знаком выпрямленного напряжения
преобразователя.
Если
угол α
увеличить
сверх
 ,
то площадь отрицательной полуволны,
при которой открыты тиристоры, будет
больше площади положительной полуволны
(см.рис.6.11г) и, следовательно, среднее
выпрямленное напряжение преобразователя
будет отрицательным, что следует также
из формулы (6.13).
,
то площадь отрицательной полуволны,
при которой открыты тиристоры, будет
больше площади положительной полуволны
(см.рис.6.11г) и, следовательно, среднее
выпрямленное напряжение преобразователя
будет отрицательным, что следует также
из формулы (6.13).
Под действием отрицательного напряжения преобразователя ток пойти не может из-за односторонней проводимости тиристоров. Поэтому инверторный режим преобразователя возможен при соблюдении трех условий:
В цепи выпрямленного тока должен быть источник э.д.с., величина которой превосходит среднее значение выпрямленной противоэдс инвертора; в схемах тиристорного привода постоянного тока – э.д.с. якоря двигателя должна быть больше Ed инвертора
 .
.Источник эдс (якорь двигателя) должен быть так подключен к преобразователю, чтобы было возможно протекание тока под действием э.д.с. якоря.
Угол управления тиристорами должен быть больше
 .
.
При соблюдении этих условий двигатель постоянного тока будет работать в генераторном режиме, вырабатывая энергию постоянного тока, которая преобразуется тиристорным преобразователем в энергию переменного тока и отдается в питающую сеть. Инверторный режим преобразователей используется в приводах для осуществления рекуперативного торможения двигателей. Схемы тиристорного привода, позволяющие осуществлять этот режим, рассмотрены в следующем параграфе.
Как источник напряжения постоянного тока тиристорный преобразователь характеризуется э.д.с. Ed, регулируемой посредством угла управления α, и внутренним сопротивлением Rп, состоящим из двух слагаемых.
![]() (6.14)
(6.14)
Rа – активное сопротивление источника питания на стороне переменного тока (сетевого реактора или трансформатора);
Rγ – условное сопротивление, связанное с падением напряжения в процессе коммутации тиристоров.
Преобразователи подсоединяются к питающей сети или через трансформатор, служащий для согласования напряжения питающей сети и двигателя, или через сетевой реактор.
Сетевые реакторы в бестрансформаторных схемах питания выполняют две функции: ограничивают ток короткого замыкания в преобразователе и уменьшают негативное влияние преобразователя на питающую сеть. И трансформаторы, и реакторы обладают активным и индуктивным сопротивлением.
Активное
сопротивление фазы трансформатора,
приведенное ко вторичной обмотке, может
быть определено по паспортным данным
трансформатора
![]() ,
,
где: I2ф – номинальный фазный ток вторичной обмотки трансформатора;
ΔРкз – потери короткого замыкания трансформатора.
П Рис.6.12.
Коммутация тока между тиристорами в
однофазном мостовом преобразователе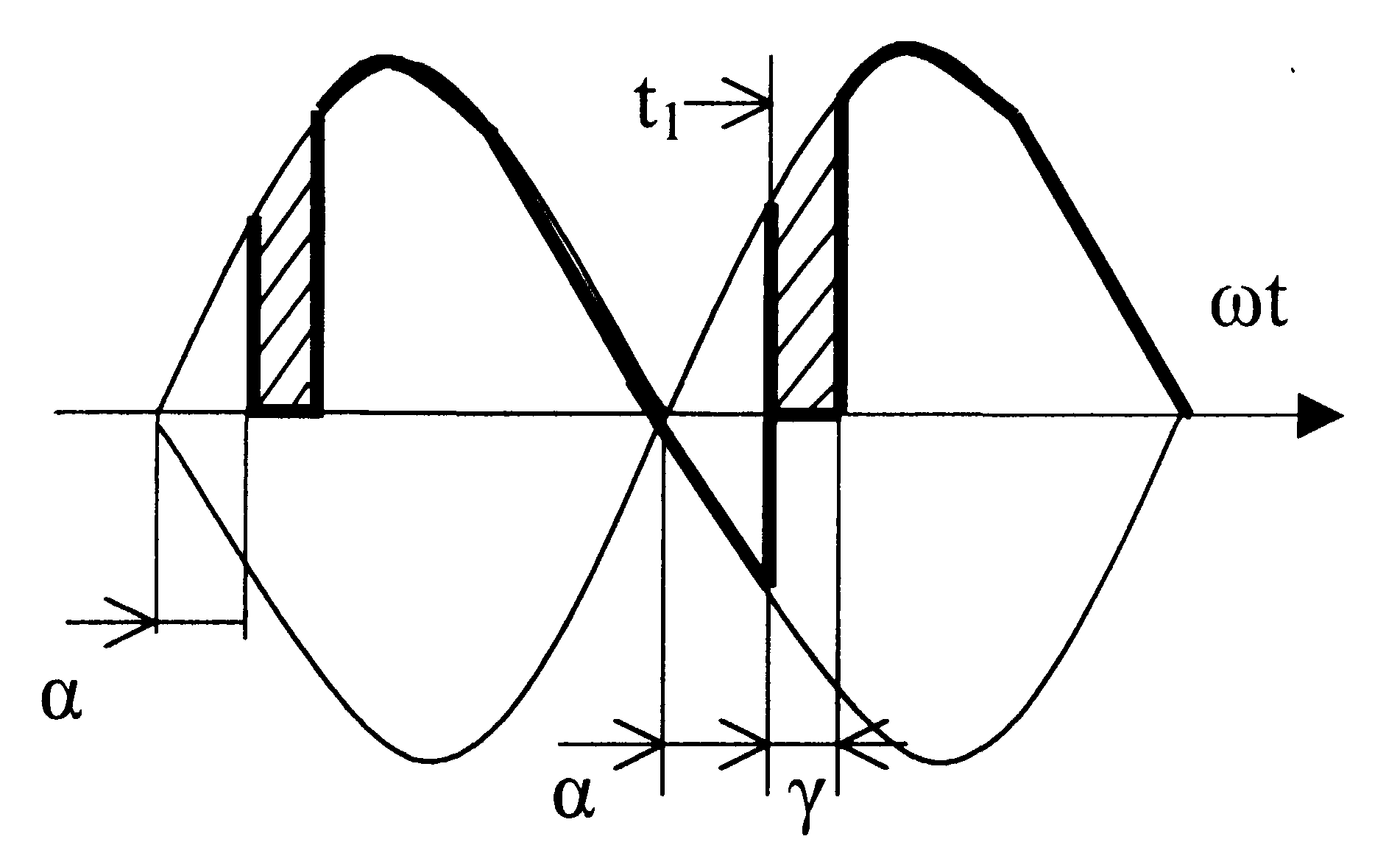
![]() .
.
Условно
величину
![]() можно принять за некоторое сопротивлениеRγ,
вызывающее падение напряжения в
преобразователе
можно принять за некоторое сопротивлениеRγ,
вызывающее падение напряжения в
преобразователе
![]() ,
(6.15)
,
(6.15)
где: m – число коммутаций за период;
Ха – индуктивное сопротивление на стороне переменного тока;
![]() ,
,
здесь U2ф – фазное напряжение вторичной обмотки трансформатора;
ек – напряжение короткого замыкания трансформатора, %.
Следует иметь в виду, что падение напряжения на сопротивлении Rγ не связано с потерями мощности в нем, поскольку оно вызвано индуктивным сопротивлением на стороне переменного тока; оно ухудшает коэффициент мощности преобразователя.
Таблица 6.1.