

Уравнение (2.32)
является уравнением колебательного
звена. Поскольку в данном анализе мы не
учитывали внутренние потери, то груз
при приложении к стреле постоянного
вращательного момента будет совершать,
незатухающие колебания с частотой
![]() .
.
2.7. Движение механической системы в пространственных координатах
Для некоторых производственных механизмов характерно движение рабочего органа одновременно в нескольких координатах. Типичным примером таких механизмов являются роботы и манипуляторы. Рассмотрим для примера движение схвата манипулятора, имеющего две степени подвижности, определяющих цилиндрическую рабочую зону механизма.
К инематическая
схема такого манипулятора показана на
рис.2.13. Схват с грузомm
имеет две степени подвижности:
горизонтальное перемещение со скоростью
V,
связанное с выдвижением рукояти
манипулятора и вращательное движение
рукояти со скоростью ω
вокруг вертикальной оси. Для простоты
анализа будем считать, что основной
момент инерции манипулятора сосредоточен
в массе груза m,
остальными движущимися массами будем
пренебрегать.
инематическая
схема такого манипулятора показана на
рис.2.13. Схват с грузомm
имеет две степени подвижности:
горизонтальное перемещение со скоростью
V,
связанное с выдвижением рукояти
манипулятора и вращательное движение
рукояти со скоростью ω
вокруг вертикальной оси. Для простоты
анализа будем считать, что основной
момент инерции манипулятора сосредоточен
в массе груза m,
остальными движущимися массами будем
пренебрегать.
Анализ движения манипулятора проведем, пользуясь уравнением Лагранжа.
Функция Лагранжа будет:
![]()
Обратим внимание
на то, что в данном случае при движении
манипулятора потенциальная энергия
механической системы не меняется, т.к.
высота положения груза остается
постоянной. Поэтому можно считать, что
![]() .
.
Найдя частные производные
![]() ,
,
где: R – расстояние от оси вращения до схвата;
φ – угол поворота манипулятора,
и подставив их в уравнение (2.21), получим систему дифференциальных уравнений, описывающих движение схвата с грузом m по двум координатам его движения.
 (2.33)
(2.33)
В уравнениях (2.33) М – момент, развиваемый двигателем поворота, приведенный к оси вращения рукояти;
Мтр1 – момент сопротивления, определяемый силами трения приведенный к оси вращения рукояти;
F – усилие, создаваемое приводом выдвижения рукояти, прикладываемое к схвату;
Fтр – усилие сопротивления движения рукояти, определяемое силами трения.
Преобразовав уравнения (2.33), получим два уравнения, описывающих движение схвата с грузом m по двум координатам: вращения относительно вертикальной оси, линейного горизонтального движения рукояти.

Проанализируем
полученные выражения. Обратим внимание
на то, что в этих уравнениях присутствуют
в левой части дополнительные члены
![]() ,
отражающие влияние движения по другой
координате. Если бы мы составили уравнение
вращения рукояти, пользуясь уравнениями
(2.8, 2.9), то мы не могли бы учесть
дополнительный момент, возникающий при
изменении линейного положения схвата.
Если схват приближается к оси вращения,
то возникает дополнительный положительный
момент, повышающий угловое ускорение
схвата; если груз двигается от оси
вращения, то этот момент будет носить
тормозной характер. В уравнении (2.35)
дополнительный член
,
отражающие влияние движения по другой
координате. Если бы мы составили уравнение
вращения рукояти, пользуясь уравнениями
(2.8, 2.9), то мы не могли бы учесть
дополнительный момент, возникающий при
изменении линейного положения схвата.
Если схват приближается к оси вращения,
то возникает дополнительный положительный
момент, повышающий угловое ускорение
схвата; если груз двигается от оси
вращения, то этот момент будет носить
тормозной характер. В уравнении (2.35)
дополнительный член![]() отражает действие центробежной силы
на вращающуюся массу.
отражает действие центробежной силы
на вращающуюся массу.
Таким образом, если рабочий орган совершает одновременное движение в двух и более координатах, то следует учитывать появление дополнительных составляющих момента (усилия) при описании движения по каждой координате.
Глава 3. Режимы работы электропривода
3.1. Энергетические диаграммы электропривода
Энергетически электромеханическую систему можно разделить на три составляющие:
преобразователь электрической энергии (управляемый выпрямитель, регулятор напряжения, преобразователь частоты и др.), который служит для преобразования электрической энергии питающей сети в электрическую энергию, удобную по своим параметрам (напряжению, частоте и др.) для питания регулируемого электрического двигателя;
электромеханический преобразователь (электрическая машина), служащий для преобразования электрической энергии в регулируемую механическую энергию, которая необходима для осуществления технологического процесса; выходным параметром электромеханического преобразователя является момент (усилие), развиваемый двигателем;
механический преобразователь (редуктор, трансмиссия), передающий механическую энергию от двигателя к рабочему органу машины (или обратно); механический преобразователь преобразует момент и скорость на валу двигателя к тем величинам момента и скорости, которые должны быть на рабочем органе по условиям технологического процесса.
Любая электрическая машина, как электромеханический преобразователь энергии, может работать в двух режимах: двигательном, преобразуя подводимую электрическую энергию в механическую или в тормозном (генераторном) режиме, преобразуя подводимую механическую энергию в электрическую. В двигательном режиме (см.рис.3.1а) электрическая энергия, потребляемая из сети, за вычетом потерь в преобразователе и электродвигателе, преобразуется в механическую и передается рабочему органу машины РО.
Тормозные режимы по своим энергетическим характеристикам могут быть различными.
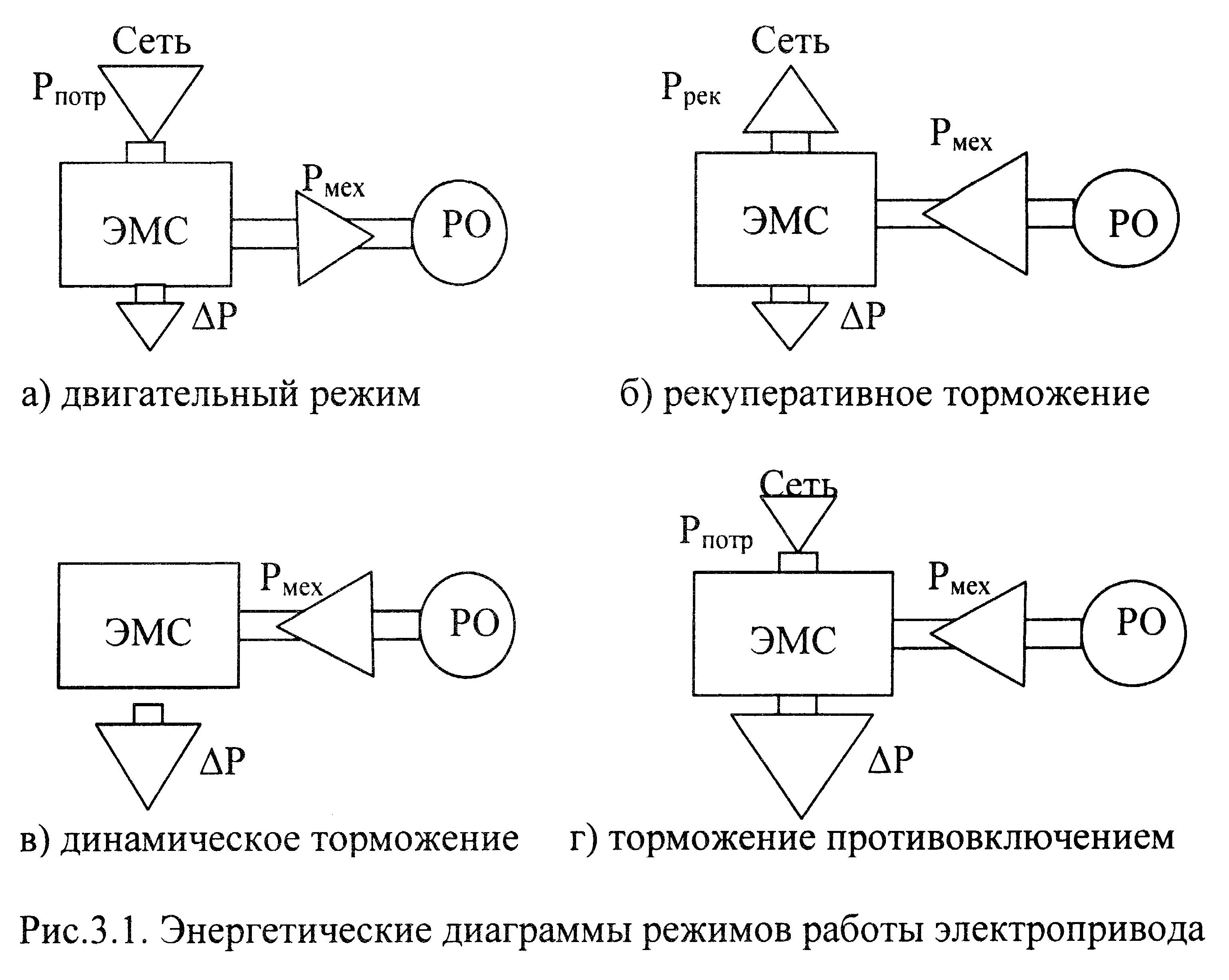
Режим рекуперативного генераторного торможения; в этом режиме (рис.3.1б) энергия, запасенная в движущихся элементах механической системы, или потенциальная энергия, отбираемая от рабочего органа (например, в режиме спуска груза), поступает на вал электродвигателя и преобразуется им, как генератором, в электрическую энергию, которая за вычетом потерь в электрической машине и преобразователе отдается в питающую сеть; в этом режиме электродвигатель работает как генератор параллельно с питающей сетью; такой режим торможения энергетически является наиболее выгодным, т.к. энергия торможения используется полезно.
Режим динамического торможения; в этом режиме двигатель отключается от сети и работает как автономный генератор, нагруженный на сопротивление; энергия торможения (см.рис.3.1в), поступающая на вал электродвигателя, преобразуется в электрическую и вся расходуется на потери в электрической машине и (в случае необходимости) во включенных в цепи обмоток машины сопротивлениях.
Режим противовключения может использоваться в двух случаях:
- режим торможения противовключением; в этом случае двигатель, вращающийся в одном направлении, с целью торможения включается в другом направлении; двигатель при этом потребляет электрическую энергию из сети и механическую энергию торможения, поступающую на вал электродвигателя (см.рис.3.1г). Суммарная энергия расходуется на потери в электродвигателе и в сопротивлениях, включенных в цепи обмоток машины; этот режим характеризуется большими потерями энергии.
- режим противовключения при протягивающем грузе; этот режим иногда используется в электроприводах грузоподъемных механизмов для создания подтормаживающего момента при спуске груза; в рассматриваемом режиме механизм движется под действием силы тяжести груза, а электродвигатель включается в направлении подъема груза, создавая посредством системы регулирования необходимый тормозной момент; энергетически этот режим идентичен режиму торможения противовключением.