Министерство образования и науки российской федерации
________________________________________________________________________
Коломенский институт (филиал)
Федерального государственного бюджетного образовательного учреждения
высшего профессионального образования
«Московский государственный открытый университет
им. В.С. Черномырдина»
-
УТВЕРЖДЕНО
Учебно-методическим
Советом КИ МГОУ
|
НОВИКОВ В.Г. |
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
для выполнения лабораторной работы № 3
по моделированию систем
Моделирования динамических процессов
с помощью подсистемы MatLab
SIMULINK
г. Коломна
2012 г.
СОДЕРЖАНИЕ
1. Краткие сведения о подсистеме MatLabSIMULINK
1.1. Запуск подсистемы SIMULINK
1.2 Создание модели
1.3. Некоторые основные приемы подготовки и редактирования модели
1.4. Установка параметров моделирования и его выполнение
2. Пример создания модели системы и выбор ее характеристик
2.1. Постановка задачи
2.2. Методика решения
2.3. Результаты моделирования
3. Задание на самостоятельную работу
Приложение. К методике моделирования в среде SIMULINKMatlab
1. Краткие сведения о подсистеме MatLab SIMULINK
SIMULINKвходит в состав семейства программных продуктов системыMatLab.
Подсистема SIMULINK служит для моделирования динамических процессов. Для пользователя это - конструктор, с помощью которого блоки, соответствующие отдельным элементам динамической системы, объединяются в единое целое и проводится исследование поведения элементов и/или системы в целом во времени.
Запуск подсистемы SIMULINK
О существляется
после предварительного запуска системыMatLabодним из трех
способов:
существляется
после предварительного запуска системыMatLabодним из трех
способов:
- нажатием кнопки
SIMULINK ![]() на панели инструментов системыMatLab
(рисунок 1);
на панели инструментов системыMatLab
(рисунок 1);
- в строке командного окна MatLab набратьSIMULINK и нажатьENTER;
- выполнить опцию OPENв менюFILEи открыть файл модели (mdl-файл) – при запуске уже готовой и отлаженной модели.
П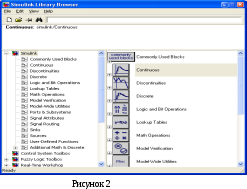 ри
применении первых двух способов
открывается окно обозревателя библиотеки
блоков (рисунок 2).
ри
применении первых двух способов
открывается окно обозревателя библиотеки
блоков (рисунок 2).
Библиотека блоков SIMULINK – это набор визуальных объектов, при помощи которых можно, соединяя модули линиями функциональной связи, составлять блок-схему любого устройства.
Библиотека разбита на ряд разделов, основные из них перечислены ниже (по алфавиту):
Continuous – блоки аналоговых элементов;
Discontinuities – блоки нелинейных элементов;
Discrete -блоки дискретных элементов;
Math Operations –блоки элементов, определяющих математические операции;
Signal & Routing –блоки маршрутизации сигналов;
Sinks– блоки приема и отображения сигналов;
Sources– блоки источников сигналов.
Блоки, входящие в раздел Sources (Источники) предназначены для формирования сигналов.Все блоки - источники имеют по одному выходу и не имеют входов.
Блоки, входящие в раздел Sinks(Приемники) предназначены для приема сигналов, они имеют только входы и не имеют выходов.
В разделе Discrete (Дискретные элементы) содержатся блоки, с помощью которых может быть описано поведение дискретных систем.
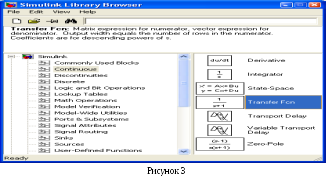
При выборе соответствующего раздела библиотеки его содержимое отображается в правой части окна (рисунок 3).