

1. Теория машин и механизмов (ТММ) — это научная дисциплина об общих методах исследования, построения, кинематики и динамики меМашина — технический объект, состоящий из взаимосвязанных функциональных частей (узлов, устройств, механизмов и др.), предназначенный для получения или преобразования механической энергии с целью выполнения возложенных на него функций.
Механизм — система взаимосвязанных тел, предназначенных для преобразования движения одного или нескольких тел в требуемое движение других тел. Механизм составляет основу большинства машин.
Твёрдое тело, входящее в состав механизма, называется звеном. Звено может состоять из одной или нескольких неподвижно соединённых деталей.
Соединение звеньев, допускающее их относительное движение, называется кинематической парой. Наиболее распространённые кинематические пары: цилиндрический шарнир; шаровой шарнир; ползун и направляющая; винтовая передача.
ханизмов и машин и о научных основах их проектирования. При построении механизма звенья соединяются в кинематические цепи. Другими словами, механизм – это кинематическая цепь, в состав которой входит неподвижной звено (стойка или корпус (основание)), число степеней свободы которого равняется числу обобщённых координат, характеризующих положения звеньев относительно стойки. Движение звеньев рассматривается по отношению к неподвижному звену – стойке (корпусу, основанию).
2.Структурная и кирематическая схемы. Чтобы разобраться в устройстве механизма, следует обратить внимание не на отдельно взятые звенья, а на характер их соединения. Подвижное соединение двух звеньев в механизмах называется кинематической парой. При этом следует интересоваться лишь кинематическими возможностями пар (то есть возможностью звеньев совершать определенные движения) и не принимать во внимание конструктивные особенности.В кинематических парах звенья могут получать относительное, вращательное, поступательное или сложное движение. Соответственно и различают вращательные, поступательные и пары сложного движения. Например, зубчатые колеса образуют вращательную пару, ползун и направляющие устройства — поступательную пару, винт и гайка — пару сложного движения или винтовую пару.Соединения кинематических пар, в свою очередь, образуют кинематическую цепь. Для изображения механизмов и их составных частей — звеньев и кинематических пар — пользуются стандартными условными обозначениями. Неподвижность звеньев в парах всех видов отмечается на схемах подштриховкой.В качестве примера приведем последовательное изображение кинематической схемы двигателя внутреннего сгорания, конструкция которого показана на рис. 25. Структурная схема механизма – это безмасштабное графическое изображение механизма с применением условных обозначений звеньев и кинематических пар (рис. 4). Если структурную схему выполнить в масштабе, то получится кинематическая схема.Структурная схема механизма применяется при структурном анализе и синтезе механизмов, а кинематическая схема используется при кинематическом и силовом анализе механизмов.На структурных и кинематических схемах механизмов звенья принято обозначать арабскими цифрами, а их подвижные соединения (кинематические пары) – прописными буквами латинского алфавита.
3.Звенья механизма. Такая совокупность двух тел, в которой формой одного тела определяется весь ряд последовательных положений, которые способно в нём занять другое тело, называетсякинематической парой. Тела, составляющие пару, называются её звеньями. Например, тело, имеющее призматический канал, и помещенная в этом канале призма составляют поступательную пару, потому что одно из этих тел может совершать относительно другого только поступательное движение. Цилиндрическая втулка и помещенный в ней шип, снабженный закраинами, не дающими ему выскочить из втулки, составляют вращательную пару. Винт и гайка составляют винтовую пару. Расстояние между нарезками винта, считаемое по направлению оси винта, называется его шагом, так что, обойдя винт один раз, нарезка приближается к концу винта на один шаг. Поступательная пара может быть математически рассматриваема как такая винтовая, шаг которой равен бесконечности. Вращательная пара может быть рассматриваема как винтовая, шаг которой равен нулю. Эти пары называются простыми; отличительное свойство их заключается в том, что в них относительное движение одного звена по отношению к другому тождественно с относительным движением второго звена по отношению к первому.Пары, не обладающие этим свойством, называются высшими. Таковы: зацепляющиеся между собой зубчатые колеса, шкив и перекинутый через него ремень, дуговой двухсторонник и полая трёхгранная призма и многие другие.Движение звена A в звене B называется обращенным по отношению к движению звена B в звене A. Одну из наиболее интересных высших пар представляет собой эллиптический циркуль. Он состоит из доски, в которой сделаны два крестообразно пересекающихся между собой прямолинейных, перпендикулярных друг к другу прореза, и из стержня с выступающими на концах цилиндрическими шипами, диаметры которых равны ширине прорезов. Стержень вставляется шипами в прорезы так, чтобы один шип ходил по одному, а другой по другому из прорезов; с противоположной стороны на шипы навинчиваются винты с головками, препятствующими шипам выскочить из прорезов. При неподвижности доски траектория всех точек стержня суть эллипсы; как частные случаи эллипсов траектория центров шипов суть прямые линии, а траектория середины стержня — окружность. Движение стержня относительно доски происходит так, как будто бы соединённый с ним круг, построенный на нём как на диаметре, катился по внутренней стороне окружности, описанной из точки пересечения средних линий прорезов радиусом, равным диаметру катящегося круга. В обращенном движении, то есть при неподвижности стержня, все точки доски описывают улитки Паскаля (см. Кривые).Звено B, соединённое в какую-либо пару со звеном A, может быть соединено в пару же со звеном C, которое, в свою очередь, может составлять пару со звеном D и так далее. Такое последовательное соединение звеньев в пары называется кинематической цепью. Если последнее звено кинематической цепи соединено в пару с первым, то цепь называется замкнутой, в противном случае она называется открытой. Такая кинематическая замкнутая цепь, которая при неподвижности одного из звеньев получает определенность движения, характеризующую механизм, называется принудительной. Когда в принудительной цепи одно из звеньев предполагается неподвижным, то говорят, что цепь поставлена на этом звене. Ставя принудительную цепь последовательно на разные её звенья, получим столько механизмов, сколько имеется звеньев в цепи. Примером принудительной цепи может служить шарнирный четырёхсторонник, состоящий из четырёх стержней, соединённых между собой вращательными парами, называемыми шарнирами.
4.Кинематические пары Кинематической парой называют подвижное соединение двух соприкасающихся звеньев
Всякая кинематическая пара ограничивает движение соединяемых звеньев.
Ограничение, наложенное надвижение твердого тела, называется условием связи.
Таким образом, кинематическая пара накладывает условия связи на относительное движение двух соединяемых звеньев. Очевидно, что наибольшее число условий связи наложенное кинематической парой, равно пяти.
Различное число условий связи, накладываемых на относительное движение звеньев кинематическими парами, позволяет разделить последние на 5 классов, так что пара k-го класса накладывает k условий связи, где k из {1,2,3,4,5}. Отсюда следует, что кинематическая пара k-го класса допускает в относительном движении звеньев 6-k степеней подвижности.
Следует заметить, что в механизмах применяются кинематические пары только пятого, четвертого и третьего классов. Кинематические же пары первого и второго классов не нашли применения в существующих механизмах.
Так как звенья соприкасаются геометрическими элементами, то, очевидно, кинематическая пара представляет собою совокупность таких элементов соединяемых звеньев. Отсюда следует, что характер относительного движения соединяемых звеньев зависит от формы геометрических элементов. Это относительное движение одного звена по отношению к другому может быть получено, если одно из двух соединяемых звеньев сделать неподвижным, а другому сообщить движение, допускаемое связями, накладываемыми кинематической парой.
Любая точка подвижного звена описывает в относительном движении траекторию, которую для краткости будем называть траекторией относительного движения. Если траектории относительного движения таких точек являются плоскими кривыми и располагаются в параллельных плоскостях, то пара называетсяплоской. В случае пространственных кинематических пар указанные траектории относительного движения представляют собою пространственные кривые.
Кроме разделения по классам, кинематические пары так же делят в зависимости от типа геометрического элемента пары:
высшие пары – это пары, в которых при соединении двух звеньев контакт осуществляется лишь на кривых или точках;
низшие пары – это пары, в которых при соединении двух звеньев контакт осуществляется по поверхностям.
Высшие кинематические пары применяются для уменьшения трения в элементах этих пар и часто реализуются в качестве роликов или подшипников. Но особенности внутреннего строения таких элементов, в общем случае, не влияют на относительное движение соединяемых парой звеньев. Существуют так же определённые приёмы, позволяющие заменять механизмы с высшими кинематическими парами их аналогами с низшими парами (что позволяет упростить исследование кинематики механизма в дальнейшем). Поэтому далее мы будем рассматривать только механизмы с низшими парами.
Низшие кинематические пары наиболее часто применяются на практике и имеют более простое внутреннее строение, по сравнению с высшими парами. Элемент низшей кинематической пары представляет собой две скользящие друг по другу поверхности, что, с одной стороны распределяет нагрузку в этом элементе, а с другой стороны увеличивает трение при относительном движении звеньев. В связи с этим, использование низших кинематических пар позволяет передавать значительную нагрузку от одного звена на другое, благодаря именно тому, что в этих парах звенья соприкасаются по поверхности.
Пары так же разделяют по типу относительного движения соединяемых звеньев на обратимые и необратимые:
Обратимые кинематические пары допускают один и тот же вид относительного движения независимо от того, какое из звеньев условно выбрано неподвижным. Если кинематическая пара одноподвижная, то она однозначно обратимая;
Необратимые кинематические пары допускают различные виды относительного движения соединяемых звеньев в зависимости от того, какое из них условно принято неподвижным.
В качестве необратимых пар в существующих механизмах применяются кулачковые пары, пары зацепления (различного вида зубчатые пары), фрикционные пары с гибкими звеньями. Изучение относительных движений звеньев, соединения которых представляют собой указанные пары, можно осуществить лишь при рассмотрении механизмов в целом, так как с помощью необратимых пар нельзя образовать двухзвенные механизмы, как это можно сделать с помощью обратимых пар. Изучение необратимых пар выходит за рамки данной работы и будет нами пропущено.
5. Основные виды механизмов. Для выполнения различных функций часто применяются механизмы, имеющие одинаковое строение, кинематику и динамику. Поэтому для изучения в теории механизмов и машин выделяются механизмы, имеющие общие методы их синтеза и анализа работы, независимо от их функционального предназначения. С этой точки зрения выделяются следующие виды механизмов:
- механизмы с низшими парами (рычажные механизмы)
- кулачковые механизмы
- зубчатые механизмы
- фрикционные механизмы
- механизмы с гибкими связями
- механизмы с деформируемыми звеньями (волновые передачи)
- гидравлические и пневматические механизмы.
Мальтийский механизм — механизм прерывистого движения, преобразующий равномерное вращательное движение в прерывистое вращательное движение.
Мальтийские механизмы бывают с внешним и внутренним зацеплением, и как правило с числом пазов от 3 до 12.
Основное применение механизм получил в кинопроекторах в качестве скачкового механизма для прерывистого перемещениякиноплёнки на шаг кадра. Механизм преобразует равномерное вращение ведущего вала в скачкообразное вращение ведомого, на котором закреплен скачковый барабан, непосредственно осуществляющий прерывистое перемещение киноплёнки. Мальтийский механизм имеет намного большие габариты и массу, нежели грейферные скачковые механизмы. Однако, по сравнению с ними обеспечивает меньшее и более равномерное воздействие на перфорацию киноплёнки при более высоком КПД. Благодаря меньшей нагрузке на перфорацию и, как следствие, меньшему износу фильмокопии по сравнению с грейфером, мальтийский механизм применяется в большинстве кинопроекторов, рассчитанных на киноплёнку 35-мм и 70-мм.
Рычажный механизм, механизм, состоящий из звеньев, соединённых между собой в низшие кинематические пары.Их делят на плоские и пространственные. В плоских рычажных механихмах звенья соприкасаются по окружности (шарниры, вращательные пары) и по линии (поступательные пары). В пространственном звенья соединяются по цилиндрическим или сферическим поверхностям (вращательные пары) и по плоскости (поступательные пары). Часто в технической литературе рычажный механизм называют стержневыми шарнирными механизмами. К ним относят также кулисные и кривошипно-ползунные механизмы. Рычажный механизм проще в изготовлении, прочнее и более износостойки, чем кулачковые и зубчатые механизмы, поэтому его применяют для передачи больших усилий в прессах, ковочных машинах, двигателях внутреннего сгорания, погрузчиках и т. п.
Кулачковые механизмы. Не менее богатый класс представляют механизмы с кулаками. Примером такого рода механизма может служить толчея, пест которой состоит из вертикально расположенного и способного иметь вертикальное движение бруска, оканчивающегося внизу тяжеловесной головкой; к этому бруску приделан сбоку выступ (кулак); подле песта помещается вращающийся вал с небольшим числом кулаков; при вращении вала кулак его подходит под кулак песта и поднимает пест на некоторую высоту, а затем, при дальнейшем вращении, кулак вала выскальзывает из-под кулака песта, и пест падает, производя удар, после чего он снова поднимается следующим кулаком вала, и так далее.Кроме твердых тел, звеньями механизмов могут быть и гибкие тела, как это мы видим в одном из распространеннейших механизмов, служащих для передачи вращения, а именно времённой передаче, состоящей из двух шкивов с перекинутым через них ремнем. Такие шкивы вращаются в одну сторону, если ремень на них надет просто; если же ремень надет так, что он перекрещивается между шкивами, принимая форму восьмерки, то шкивы вращаются в противоположные стороны. Отношение угловых скоростей было бы обратно пропорционально радиусам шкивов, если бы не было скольжения ремня, которое изменяет это отношение примерно на 2 процента. Часть ремня, набегающая на шкив, должна идти так, чтобы средняя линия ремня находилась в одной плоскости со средним сечением шкива. Если это условие не соблюдается, то ремень соскочит; сбегающая же со шкива часть ремня может быть отведена значительно в сторону. Этим обстоятельством пользуются при устройстве передачи между шкивами, находящимися в разных плоскостях.
6.структурный анализ и синтез механизмов. Профессор Л.В. Ассур предложил простой метод синтеза структурных схем плоских механизмов путем последовательного присоединения к первичному механизму особых кинематических цепей – групп. В качестве первичного механизма 1-го класса, принимается простейший двухзвенный механизм, состоящий из подвижного звена, установленного на стойке.
Группой называется кинематическая цепь, которая после присоединения к стойке своими свободными элементами имеет степень подвижности, равную нулю. Кроме того, в группах Ассура все кинематические пары низшие. Следовательно, для группы Ассура структурная формула (2) примет вид
![]() (3)
(3)
Из этого уравнения следует, что число звеньев группы всегда четное, а число пар – кратно трем. В табл. 1 приведены группы Ассура различных классов и порядков.
Класс групп определяется по предложению И.И. Артоболевского числом кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами. Порядок группы определяется числом внешних элементов кинематических пар, которыми группа присоединяется к имеющемуся механизму: первая группа присоединяется к первичному механизму, каждая последующая – к полученному механизму, при этом нельзя присоединять группы к одному звену. Структурные группы 2-го класса (обычно называемые двухпроводковыми группами Ассура) дополнительно классифицируются по видам, различающихся сочетанием вращательных и поступательных пар (рис. 8).
Класс и порядок механизма определяются классом и порядком наиболее сложной группы, входящей в состав механизма.
Структурный
анализ механизма приводится путем
расчленения его на структурные группы
и первичные механизмы в порядке, обратном
образованию механизма. Как
на любом этапе проектирования при
структурном синтезе различают задачи
синтеза и задачи анализа.
Задачей
структурного анализа является
задача определения параметров структуры
заданного механизма - числа звеньев и
структурных групп, числа и вида КП, числа
подвижностей (основных и местных), числа
контуров и числа избыточных связей.
Задачей
структурного синтеза является
задача синтеза структуры нового
механизма, обладающего заданными
свойствами: числом подвижностей,
отсутствием местных подвижностей и
избыточных связей, минимумом числа
звеньев, с парами определенного вида
(например, только вращательными, как
наиболее технологичными) и т.п.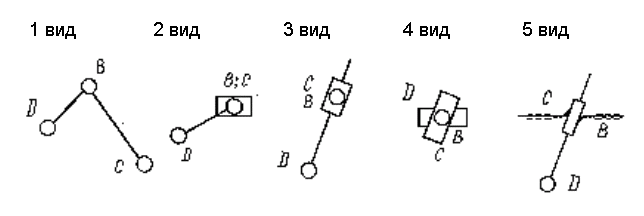
Подвижность механизма - число независимых обобщенных координат однозначно определяющее положение звеньев механизма на плоскости или в пространстве. Связь - ограничение, наложенное на перемещение тела по данной координате. Избыточные (пассивные) - такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной подвижности механизма. При этом расчетная подвижность механизма уменьшается, а степень его статической неопределимости увеличивается. Иногда используется иное определение: Избыточные связи - это связи число которых в механизме определяется разностью между суммарным числом связей, наложенных кинематическими парами, и суммой степеней подвижности всех звеньев, местных подвижностей и заданной (требуемой) подвижностью механизма в целом. Местные подвижности - подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции), а введены в механизм с другими целями (например, подвижность ролика в кулачковом механизме обеспечивает замену в высшей паре трения скольжения трением качения).
7. Структурная группа (группа Ассура)
Структурная группа (группа Ассура) – это такая кинематическая цепь, присоединение которой к любому механизму не изменяет его числа степеней свободы. При этом такая цепь не должна распадаться на более простые цепи с тем же свойством. Так как группа Ассура не изменяет числа степеней свободы механизма после присоединения к нему или отсоединения от него, то она обладает собственной нулевой степенью свободы. Таким образом:Wгр=3nгр–2p5гр=0, откуда p5гр=3nгр/2 или nгр=2p5гр/3,где:nгр – число звеньев в группе Ассура, включая фиктивные звенья, полученные при замене высших пар, p5гр – число кинематических пар пятого класса в группе Ассура, включая пары, полученные при замене высших пар. Примечание: рассматриваются структурные группы, включающие только низшие пары 5 класса, т.к. при наличии высших кинематических пар в механизме их можно заменить цепями с низшими парами. Так как количество звеньев и кинематических пар заведомо целые числа, то число звеньев в группе Ассура всегда четное, а число кинематических пар кратно трем. Таким образом группы Ассура имеют следующие сочетания чисел звеньев и кинематических пар (таблица 2.1). Класс группы Ассура определяется числом сторон замкнутого контура (многоугольника), входящего в состав этой группы. При этом все группы, имеющие два звена, относятся к группам II класса, а контур с числом сторон больше трех должен быть подвижным (т.е. иметь изменяемую форму при работе механизма).Порядок группы Ассура Порядок группы Ассура определяется числом элементов кинематических пар, которыми группа присоединяется к механизму.Группы Ассура второго класса одновременно являются группами второго порядка (иногда их называют двухповодковыми группами), но они еще подразделяются на виды.Вид группы Ассура зависит от сочетания вращательных (шарниров) и поступательных (ползунов) кинематических пар в данной группе. Всего существует пять видов групп Ассура второго класса.
8. Понятие о степени подвижности механизма Если в пространственной к. ц., состоящей из «n» подвижных звеньев, имеются к.п. 1-ого, 2-ого,… 5-ого класса, число которых, соответственно, p1,p2,… p5, то к. ц. имеет число степеней свободы, определяемое формулой А.П. Малышева. W=6n-5p5-4p4-3p3-2p2-p1 (3.1) Так как любой механизм имеет одно неподвижное звено (стойку) и «n» подвижных звеньев, то формула (3.1) может использоваться для определения W пространственного механизма, где n – число подвижных звеньев, а W – степень подвижности механизма, показывающая сколько нужно иметь ведущих звеньев (двигателей) для получения определенного движения остальных его звеньев. Для плоского механизма степень подвижности определяется по формуле Чебышева: W=3n-2p5-p4, (3.2)
При этом к.п. 5-ого класса существует в виде поступательных, вращательных и винтовых.
При определении W необходимо учитывать возможность наличия так называемых «пассивных» звеньев, т.е. звеньев, устраняемых без формального ущерба для кинематики анализируемого механизма (рис.8). а) W=3·4-2·6-0=0 – с пассивным звеном, б) W=3·3-2·4-0=1 – фактически. Кроме того, необходимо учитывать возможность наличия избыточных связей,