

Лабораторная работа №2 «Синтез цифровых регуляторов для динамических систем»
.docxБалтийский Государственный Технический Университет «ВОЕНМЕХ» им. Д.Ф. Устинова Кафедра мехатроники и робототехники.
Лабораторная работа №2 «Синтез цифровых регуляторов для динамических систем»
Выполнил: Евстифеев А. С. Группа: Н101
Вариант: 2
Проверил: Ляпин А. С.
Санкт-Петербург
2014г
Оглавление
1. Цель работы 3
2. Исходные данные 3
3. Выполнение работы 3
3.1. Прямой метод Эйлера 4
3.2. Обратный метод Эйлера 5
3.3. Метод трапеции 6
3.4. Model Discretizer 7
3.5. Исследование влияния периода дискретизации. 8
4. Выводы по работе 10
1. Цель работы
Аналитическое определение параметров обобщенного цифрового регулятора по известному математическому описанию непрерывного регулятора.
Определение динамических характеристик замкнутой системы при различных параметрах цифрового регулятора.
2. Исходные данные
Таблица 1. Исходные данные
|
Вид передаточной функции регулятора внутреннего контура |
|
|
|
|
|
|
|
|
|
|
|
|










3. Выполнение работы
Определение параметров цифрового регулятора осуществляется путем пересчета параметров синтезированного непрерывного регулятора.
Идея
переоборудования заключается в следующем:
замкнутая система с непрерывным объектом
управления
 и синтезированным непрерывным регулятором
с передаточной функцией
и синтезированным непрерывным регулятором
с передаточной функцией
 переоборудуется к системе с цифровым
регулятором
переоборудуется к системе с цифровым
регулятором
 и фиксатором вычисленных значений с
передаточной функцией
и фиксатором вычисленных значений с
передаточной функцией
Переоборудование базируется на представлении интеграла суммой. Эта сумма может быть вычислена различными способами.
Рассмотрим способы численного интегрирования, которые использованы в среде Matlab-Simulink. Но, для начала, необходимо непрерывный регулятор внутреннего контура, полученный при выполнений первой лабораторной работы, заменить ПИД регулятором:



Рисунок
1. ПИД регулятор во внутреннем контуре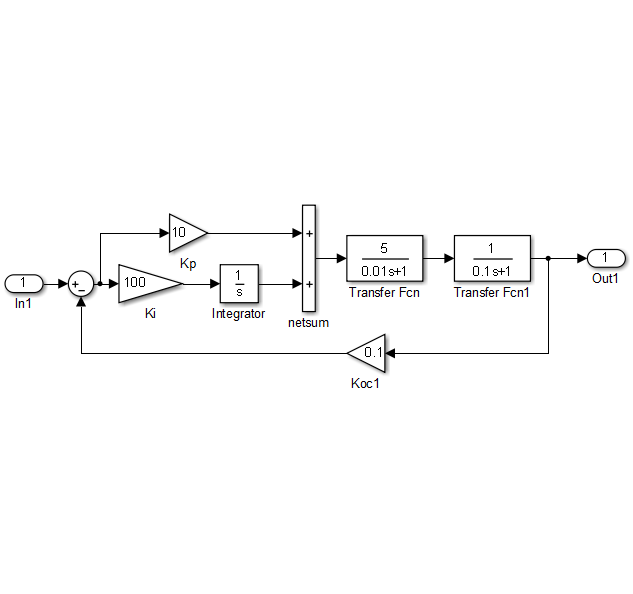
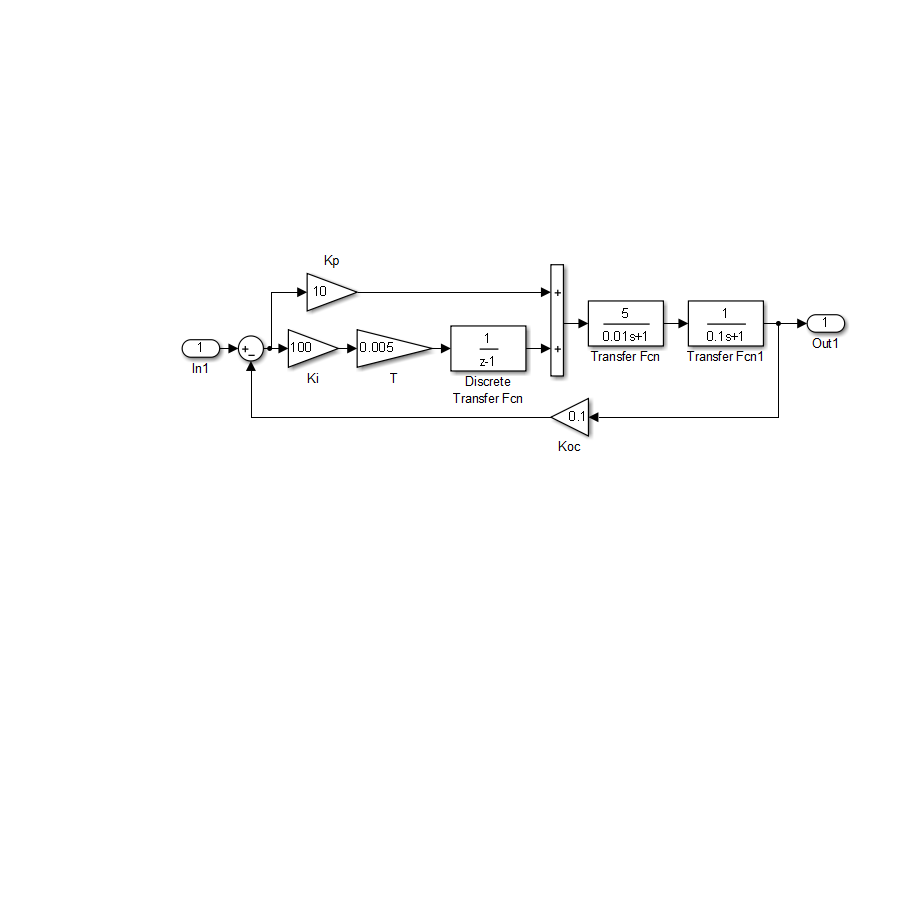
3.1. Прямой метод Эйлера
При использовании прямого метода Эйлера осуществляется замена переменной

Рисунок
2. Цифровой регулятор, полученный прямым
методом Эйлера
Произведя линейный анализ в Linear Analysis Tool можем сравнить графики реакций на единичный скачок непрерывной и оцифрованной систем:
Рисунок
3. Реакция на единичный скачок непрерывной
системы и цифровой системы, полученной
прямым методом Эйлера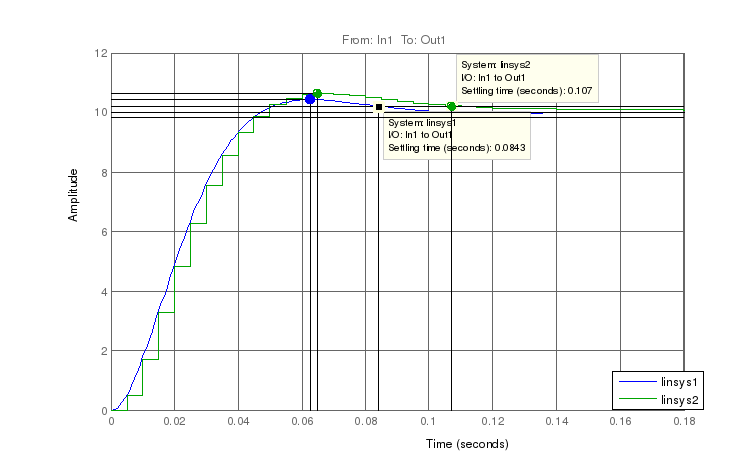
3.2. Обратный метод Эйлера
При использовании обратного метода Эйлера осуществляется замена переменной

Рисунок
4. Цифровой регулятор, полученный
обратным методом Эйлера
Рисунок
5. Реакция на единичный скачок непрерывной
системы и цифровой системы, полученной
обратным методом Эйлера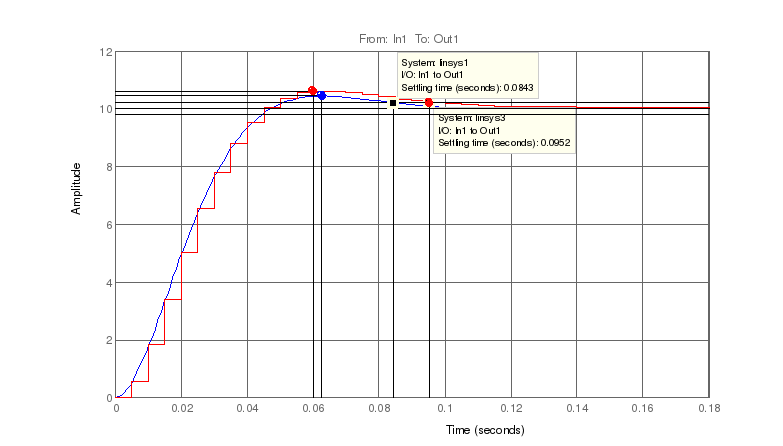
Видим, что полученная цифровая система по-прежнему хуже непрерывной как по времени переходного процесса, так и по показателю перерегулирования, но уже лучше системы, полученной прямым методом Эйлера.
3.3. Метод трапеции
В этом случае аналогом оператора интегрирования является

Рисунок
6. Цифровой регулятор, полученный методом
трапеции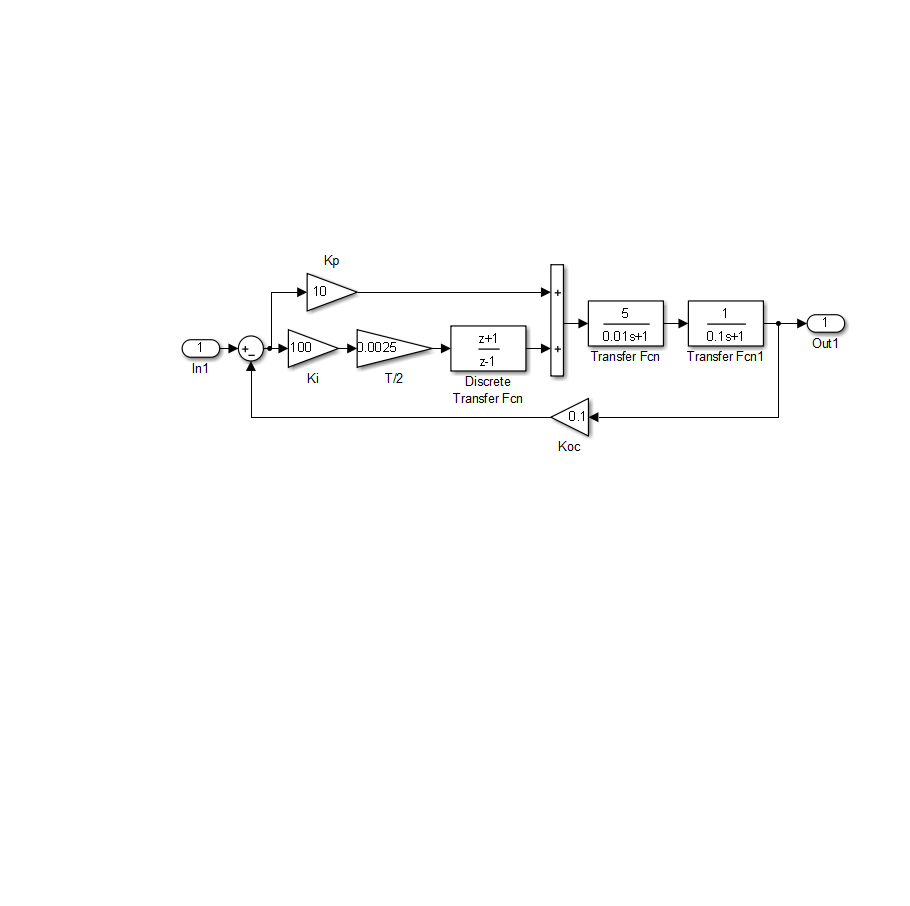
Рисунок
7. Реакция на единичный скачок непрерывной
системы и цифровой системы, полученной
методом трапеции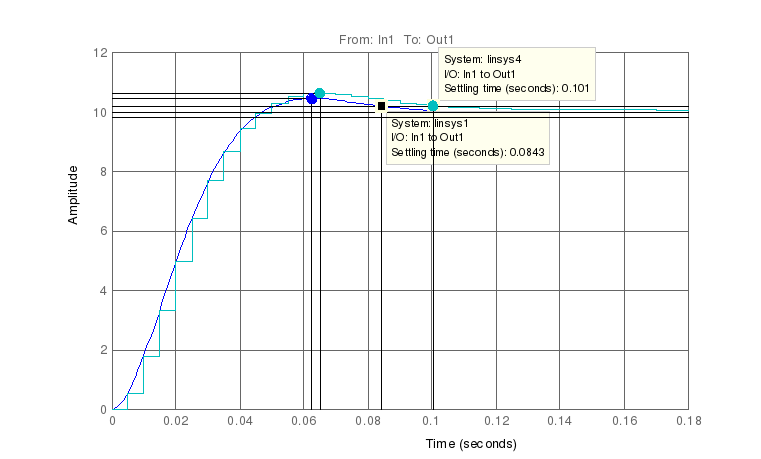
Исходя из графиков заметим, что полученная система по-прежнему хуже непрерывной по всем показателям, а каких-либо улучшений, по сравнению с предыдущей, получить не удалось.
3.4. Model Discretizer
Рисунок
8. Цифровой регулятор, полученный при
помощи команды Analysis – Control Design – Model
Discretizer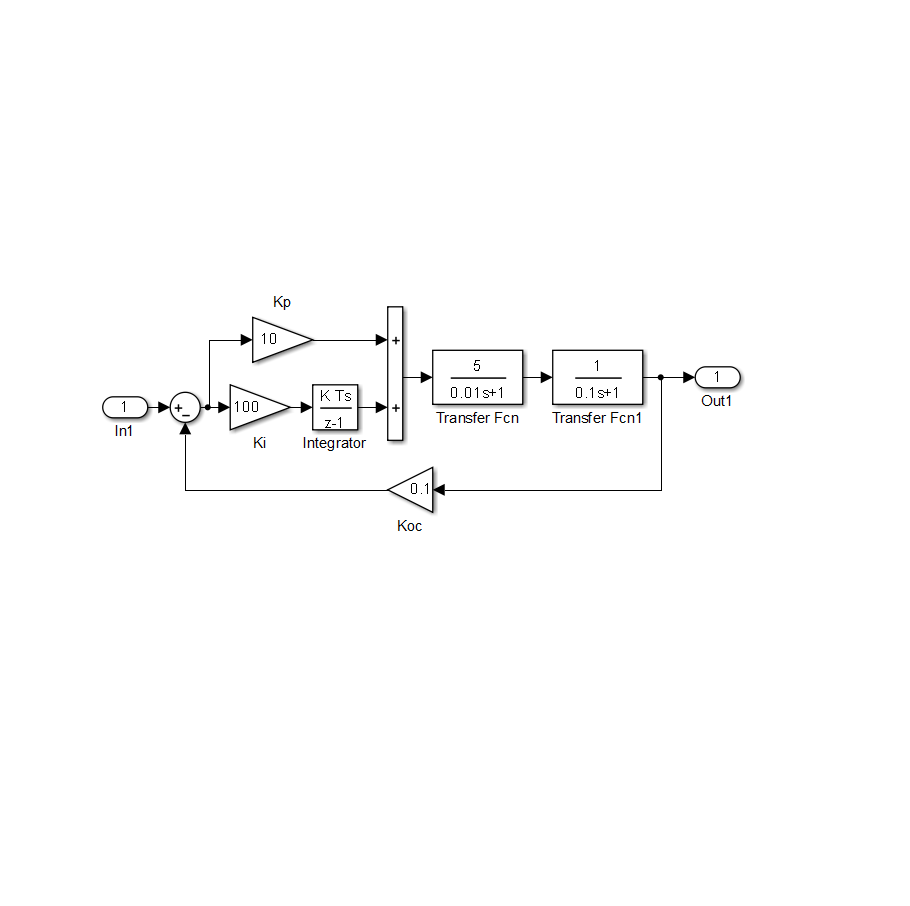
Рисунок
9.
Реакция
на единичный скачок непрерывной системы
и цифровой системы, полученной при
выполнении команды Model
Discretizer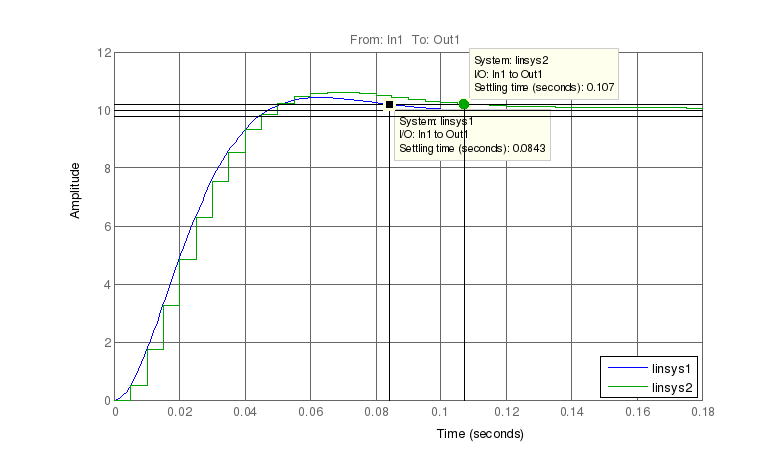
3.5. Исследование влияния периода дискретизации.
С помощью утилиты Linear Analysis Tool исследуем поведение замкнутой системы с цифровым регулятором при разных периодах дискретизации. Исследования будем проводить на примере регулятора, построенного по обратному методу Эйлера, т.к. он оказался наиболее удачным.
Результаты исследования приведены на рисунке 10.
Рисунок
10. Реакция на единичный скачок систем
с разными периодами дискретизации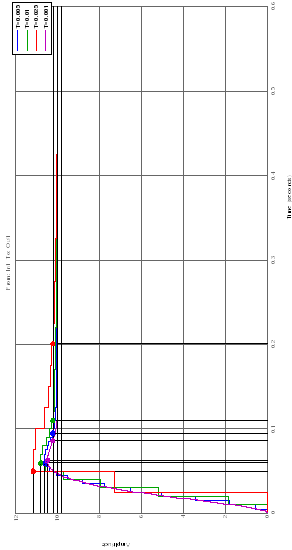
4. Выводы по работе
В ходе выполнения работы были синтезированы цифровые регуляторы внутреннего контура, разными методами, и исследовано влияние периода дискретизации на динамические характеристики замкнутой системы.
Наиболее удачным оказался регулятор, полученный обратным методом Эйлера. Он показал наименьшее перерегулирование и время переходного процесса.
Из графика (рис.10) видно, что при увеличение периода дискретизации переходный процесс становится менее качественным и удаляется по своим показаниям от технического оптимума.