

Курсовой проект по дисциплине «Механика управляемых машин»
.pdfБалтийский Государственный Технический Университет «ВОЕНМЕХ» имени Д. Ф. Устинова
Кафедра К4 «Прикладная механика, автоматика и управление»
Курсовой проект
по дисциплине «Механика управляемых машин»
Кинематика робота-манипулятора
Вариант №19
Выполнил:
Студент группы К-491
Фоминых П.Ю.
Санкт-Петербург
2013
2
Техническое задание
Схема 4
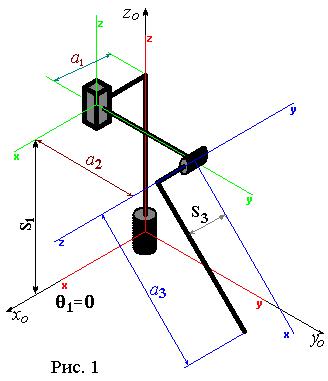
Структурная схема манипулятора, с обозначением размеров показана на рис. 1. В табл. 1 по каждой степени свободы для различных вариантов заданий приведены размеры и значения параметров матриц перехода, которые рекомендуется использовать при первичном формировании механизма.
В проекте исследуется работа манипулятора при цикловой, позиционной и контурной системе управления.
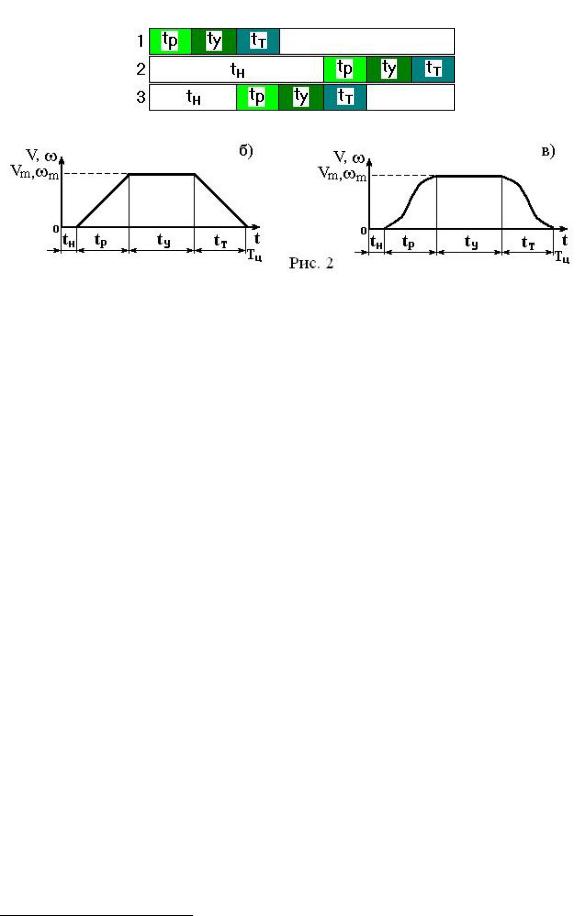
Исходные данные для цикловой системы управления. На рис. 2,а
показаны варианты циклограмм, где tн – время начальной паузы, tР – время разгона, tу – время установившегося движения, tт – время торможения. На рис. 2,б,в – законы изменения обобщенных скоростей. На рис. 2,б – трапецеидальный закон, на рис. 2,в – безударная трапеция. В табл. 2 по каждой степени свободы для различных вариантов приведены параметры циклограммы, пределы изменения обобщенных координат и тип закона изменения обобщенной скорости.
Таблица 1
вар |
1O |
S1, м |
a1, м |
1O |
2O |
S2, м |
a2, м |
2O |
3O |
S3, м |
a3, м |
3O |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
90 |
0,7 |
0 |
0 |
90 |
0 |
0,35 |
90 |
-45 |
0,15 |
0,6 |
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3
a)
Таблица 2
Вар. |
Вариант циклограммы |
Степень свободы |
законаТип движения |
tн, c |
tP, c |
tу, c |
tт, c |
Начальное |
Конечное |
|
|
|
|
||||||
|
|
|
|
положение |
положение |
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Рис. 2в |
0 |
0,5 |
1,0 |
0,5 |
1(0) = 10O |
1(TЦ) = 110O |
|
|
|
|
|
|
|
|
|
|
3 |
3 |
2 |
Рис. 2в |
3,5 |
0,5 |
1,0 |
0,5 |
S2(0) = 0,2 м |
S2(TЦ) = 0,4 м |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
Рис. 2б |
1,5 |
0,5 |
1,0 |
0,5 |
3(0) = 20O |
3(TЦ) = 50O |
|
|
|
|
|
|
|
|
|
|
При позиционной системе управления в процессе работы манипулятор должен занять ряд позиций, переходя из одной позиции в другую с заданными параметрами движения.
В таблице 3 приведены координаты позиций, занимаемых рабочим органом манипулятора (точка
A, см. рис. 1)1.
Таблица 3
Вар |
|
Позиция 1 |
|
|
Позиция 2 |
|
|
Позиция 3 |
|
|
|
|
|
|
|
|
|
|
|
||
xA, м |
yA, м |
zA, м |
xA, м |
yA, м |
zA, м |
xA, м |
yA, м |
zA, м |
||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
0,3 |
0,65 |
0,5 |
-0,6 |
0,1 |
0,55 |
0,3 |
-0,8 |
0,8 |
|
|
|
|
|
|
|
|
|
|
|
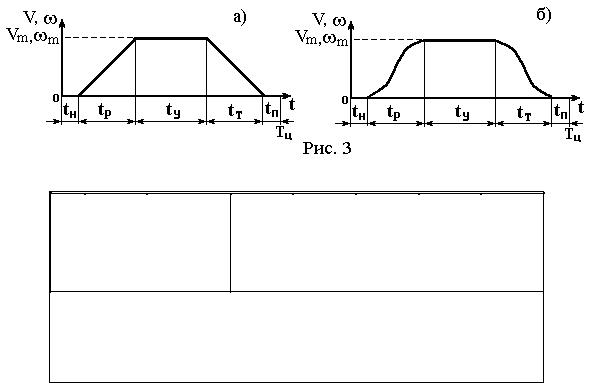
Часть общего цикла движения точки A от позиции 1 до позиции 2 будем называть участком 1, а от позиции 2 до позиции 3 – участком 2. На рис. 3 показаны варианты изменения обобщенных скоростей при планировании движении на участке, где tн – время начальной паузы, tР – время разгона, tу – время установившегося движения, tт – время торможения, tп – время паузы,. На рис. 3а
– трапецеидальный закон, на рис. 3б закон в виде безударной трапеции.
В таблице 4 для каждой степени свободы указан тип закона движения для каждого участка и значения его параметров.
1 Если позиция окажется вне зоны сервиса манипулятора, то по согласованию с преподавателем надо изменить её координаты.
4
Таблица 4
Вар. |
Степень свободы |
Тип закона движения |
|
|
|
tн, c |
tP, c |
tу, c |
tт, c |
tп, c |
|
|
|
|
|
|
1 |
Рис. 3в |
0 |
0,5 |
1,0 |
0,5 |
0 |
|
|
|
|
|
|
|
|
3 |
2 |
Рис. 3в |
3,5 |
0,5 |
1,0 |
0,5 |
0 |
|
|
|
|
|
|
|
|
|
3 |
Рис. 3б |
1,5 |
0,5 |
1,0 |
0,5 |
0 |
|
|
|
|
|
|
|
|
При контурной системе управления в процессе работы рабочий орган манипулятора (точка A, см. рис. 1) должен пройти по заданной траектории. В табл. 5 для каждого варианта указан тип траектории, координаты её начала и конца, тип и параметры закона движения точки A.
Таблица 5
|
Тип траектории |
Тип закона движения |
|
|
|
|
Начало траектории |
Конец траектории |
||||
Вар. |
tн, c |
tP, c |
tу, c |
tт, c |
|
|
|
|
|
|
||
|
|
|
|
xA, м |
yA, м |
zA, м |
xA, м |
yA, м |
zA, м |
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
Прямая |
Рис. 2в |
0 |
0,8 |
1,0 |
0,8 |
0,3 |
0,65 |
0,5 |
-0,6 |
0,1 |
0,55 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Для кинетостатического расчета в таблице 6 по каждому варианту указаны массы mi и моменты инерции Ji звеньев в ГЦСК. Величины m3 и J3 указаны с учетом массы и момента инерции груза, перемещаемого манипулятором.
Таблица 6
|
m1, кг |
J1x, |
J1y, |
J1z, |
m2, кг |
J2x, |
J2y, |
J2z, |
m3, кг |
J3x, |
J3y, |
J3z, |
|
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
|||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
24 |
0,4 |
0,4 |
0,11 |
12 |
0,008 |
0,15 |
0,15 |
24 |
0,015 |
0,8 |
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5
Содержание
Введение ......................................................................................................................................... |
6 |
1.Структурный анализ механизма манипулятора ...................................................................... |
6 |
2.Кинематический анализ ............................................................................................................. |
7 |
2.1.Цикловая система управления............................................................................................ |
7 |
2.1.1.Законы движения по степеням свободы ..................................................................... |
7 |
2.1.2.Прямая позиционная задача в одном положении ...................................................... |
8 |
2.1.3.Исследование движения манипулятора .................................................................... |
11 |
2.2.Позиционная система управления ................................................................................... |
14 |
2.2.1.Позиции рабочего органа и планирование движений ............................................. |
14 |
2.2.2.Исследование движения манипулятора .................................................................... |
16 |
2.3.Контурная система управления ........................................................................................ |
19 |
2.3.1.Траектория рабочего органа....................................................................................... |
19 |
2.3.2.Исследование движения манипулятора .................................................................... |
20 |
3.Кинетостатический анализ ...................................................................................................... |
22 |
3.1.Инерционные параметры механизма ............................................................................... |
23 |
3.2.Уравнения равновесия. Определение управляющих сил .............................................. |
26 |
3.3.Цикловая система управления.......................................................................................... |
27 |
3.4.Позиционная система управления ................................................................................... |
32 |
3.5.Контурная система управления ........................................................................................ |
36 |
Заключение................................................................................................................................... |
40 |
Приложение.................................................................................................................................. |
41 |
Библиографический список........................................................................................................ |
42 |
|
|
|
|
6 |
|
|
|
|
|
|
|
Введение |
|
|
|
|
В проекте решается ряд взаимосвязанных задач по исследованию функционирования |
||||||
робота-манипулятора при различных системах управления: |
|
|
|
||||
|
- Цикловой |
|
|
|
|
|
|
|
- Позиционной |
|
|
|
|
||
|
- Контурной |
|
|
|
|
||
|
Исследование будет включать в себя: |
|
|
|
|||
|
- Структурный |
|
|
|
|
||
|
- Кинематический |
|
|
|
|||
|
- Кинестетический анализ механизма. |
|
|
|
|||
|
Расчеты, таблицы, графики и рисунки выполняются при помощи программы CaDMan, |
||||||
реализующей решение всех рассматриваемых задач. |
|
|
|
||||
|
|
|
|
1.Структурный анализ механизма манипулятора |
|
|
|
|
Схема манипулятора, с обозначением размеров показана на рисунке 1 технического |
||||||
задания (ТЗ). Определим число степеней свободы W для данного пространственного механизма |
|||||||
по формуле Сомова-Малышева: |
S2 |
2 |
|
||||
|
|
|
|
|
θ3 |
||
|
|
|
|
|
|
||
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W 6n kpk 6 3 5 3 18 15 3 , |
|
|
|
|
|
|
|
|
k 1 |
|
|
|
|
где n – количество подвижных звеньев в механизме, pk – |
1 |
|
3 |
|||
количество кинематических пар k-го класса. Структурная схема |
|
|
|||||
|
|
|
|||||
механизма с обозначением звеньев приведена на рисунке 1.1. |
|
|
|
||||
|
S2 |
2 |
|
Маневренность – число |
|
|
|
|
θ3 |
степеней свободы манипулятора со |
|
|
|
||
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
схватом, закрепленным на стойку |
|
|
|
|
|
|
|
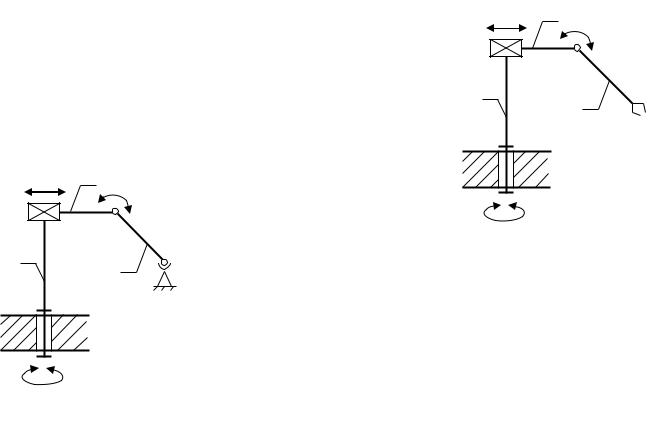
шаровым шарниром (рис. 1.2). |
θ1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
3 |
Определим маневренность |
|
|
Рисунок 1.1 |
|
|
|
манипулятора WM : |
|
|
|
|
|
|
|
|
|
|
|
|
WM 6 3 5 3 3 1 18 15 3 0
Маневренность характеризует способность манипулятора обеспечивать различную ориентацию рабочего органа.
θ1 |
|
WM 0 означает, что механизм не может менять ориентацию |
|
рабочего органа. |
|
|
Рисунок 1.2 |
|
|
|

7
2.Кинематический анализ
При кинематическом анализе механизмов роботов-манипуляторов возникают две взаимообратные задачи. Прямая задача формулируется следующим образом: при известных мгновенных значениях кинематических параметров относительного движения звеньев определить мгновенные значения кинематических параметров абсолютного движения звеньев. Совокупность решений для последовательных положений механизма являются решением общей задачи, а каждое в отдельности для одного положения есть решение частной прямой задачи.
При решении обратной задачи известными параметрами являются координаты интересующей нас точки, ее скорость и ускорение. Искомыми являются параметры относительного движения звеньев, которые обеспечили бы требуемое движение рассматриваемой точки.
Прямая и обратная задачи решают методом преобразования координат [1, с.14-19]. Решения данных задач используются при задании движения рабочего органа. В зависимости от типа движения, реализуемого по отдельным степеням свободы, различают системы: контурного, позиционного и циклового управлений.
2.1.Цикловая система управления
Системы циклового управления – простейший способ программного управления, когда по каждой степени свободы программируется только начальное и конечное положения. Движения по степеням свободы происходят раздельно.
2.1.1.Законы движения по степеням свободы
Для осуществления циклового типа управления в таблице 2 ТЗ по каждой степени свободы приведены параметры циклограммы, пределы изменения обобщенных координат и тип закона изменения обобщенной скорости. Законы изменения обобщенных скоростей: трапеция для 3-й степени свободы и безударная трапеция для 1-й и 2-й степеней. Их вид приведен на рис.2.1:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
трапеция |
|
|
|
|
|
|
|
|
|
|
|
|
безударная трапеция |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.1
8
Циклограмма движения представлена на рис.2.2:
Рисунок 2.2
Где tн – время начальной паузы, tР – время разгона, tу – время установившегося движения, tт – время торможения.
Таблица 2.1
Степень |
tн, c |
tр, c |
tу, c |
tт, c |
|
свободы |
|||||
|
|
|
|
||
|
|
|
|
|
|
1 |
0 |
0,5 |
1,0 |
0,5 |
|
|
|
|
|
|
|
2 |
3,5 |
0,5 |
1,0 |
0,5 |
|
|
|
|
|
|
|
3 |
1,5 |
0,5 |
1,0 |
0,5 |
|
|
|
|
|
|
2.1.2.Прямая позиционная задача в одном положении
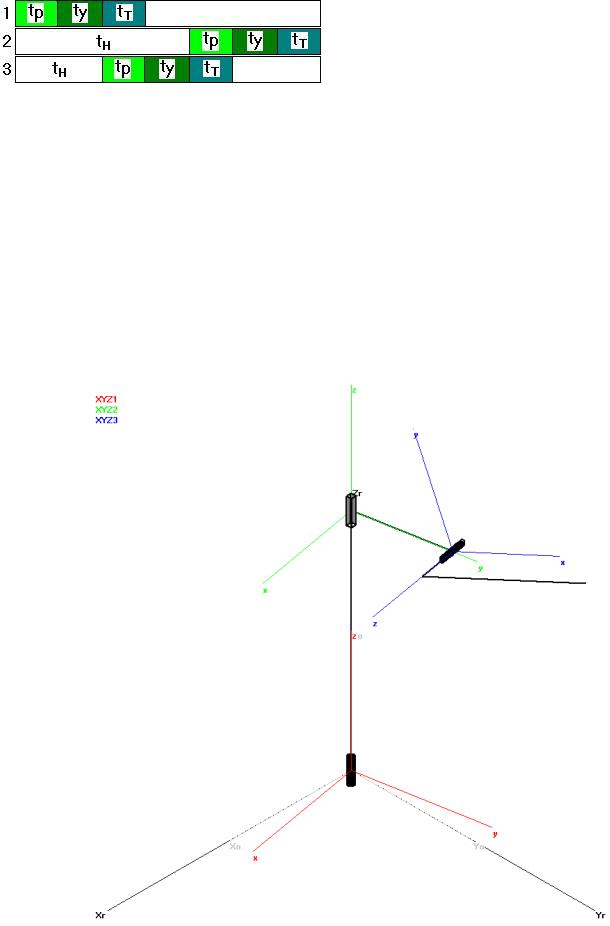
Схема манипулятора в начальном положении с изображением ЛСК приведена на рис.2.3. Координатные системы манипулятора установлены таким образом, что являются связанными или представлением Денавита-Хартенберга [1, с.17-18]
Рисунок 2.3
9
Найдем для начального положения звеньев манипулятора параметры точки A (рабочего органа) в абсолютных системах координат. В соответствии с ТЗ в таблице 2.2 приведены параметры обобщенных координат.
Таблица 2.2
θ1(0), o |
S2(0), м |
θ3(0), o |
10 |
0,2 |
20 |
Для решения прямой задачи необходимо осуществить переход от одной системы координат в другую. Выражение для преобразования координат, например, рассматриваемой точки А при переходе из (i+1)-ой системы координат в i-ю выглядит следующим образом:
x(i) |
x(i 1) |
cos |
(i 1) |
y (i 1) |
sin |
(i 1) |
a |
i |
|
|
|
|
|
|
|
|
|
|
|
|
||||
A |
A |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
y (i) |
x(i 1) |
sin |
(i 1) |
cos |
(i) |
y (i 1) |
cos |
(i 1) |
cos |
(i) |
z |
(i 1) |
sin |
(i) |
|
|
||||||||
A |
A |
|
|
|
|
A |
|
|
|
|
|
|
A |
|
|
|
|
|||||||
z (i) |
x(i 1) |
sin |
(i 1) |
sin |
(i) |
y (i 1) |
cos |
(i 1) |
sin |
(i) |
z (i 1) cos |
(i) |
S |
, |
||||||||||
A |
A |
|
|
A |
|
|
|
|
|
A |
|
|
i |
|
||||||||||
данное выражение в матричной форме:
xA(i) |
|
cos |
|
|
sin |
|
|
|||||
|
|
|
|
|
|
(i 1) |
|
|
|
|
(i 1) |
|
|
|
|
|
|
|
|
|
|
|
|
||
y (i) |
sin |
(i 1) |
cos |
(i) |
cos |
(i 1) |
cos |
(i) |
||||
|
A |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
(i) |
sin (i 1) |
sin (i) |
cos (i 1) |
sin (i) |
|||||||
z A |
|
|||||||||||
что эквивалентно:
0
sin (i) cos (i)
|
xA(i 1) |
|
|
|
|
y
z (i 1)
A(iA 1)
ai
0 ,Si
xA(i) |
|
cos |
|
|
sin |
|
|
0 |
|
|||||
|
|
|
|
|
(i 1) |
|
|
|
|
(i 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
yA(i) |
sin (i 1) cos (i) |
cos (i 1) cos (i) |
sin (i) |
|||||||||||
(i) |
|
|
sin |
|
sin |
|
cos |
|
sin |
|
cos |
|
||
zA |
|
|
(i 1) |
(i) |
(i 1) |
(i) |
(i) |
|||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
0 |
|
|
|
0 |
|
|
|
0 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
введем обозначения:
a |
|
xA(i 1) |
|
|
|
i |
|
|
|
|
|
0 |
|
yA(i 1) |
|
, |
|
|
|
|
|
|
|
Si |
zA(i 1) |
|
|
||
1 |
|
|
1 |
|
|
|
|
|
|
||
RAi Ti RAi 1 , где RAi , RAi 1 - векторы координат точки в системе координат i-го и i+1 звена, Т i - матрица перехода из системы координат i+1 звена в систему координат i-го звена:
|
|
cos |
(i 1) |
|
sin |
(i 1) |
|
0 |
|
a |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
i |
|
|||
T |
sin (i 1) cos (i) |
cos (i 1) cos (i) |
sin (i) |
0 |
, |
||||||||||
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|||
i |
|
sin |
|
cos |
|
sin |
|
cos |
|
S |
|
||||
|
(i 1) |
(i) |
(i 1) |
(i) |
(i) |
|
|||||||||
|
|
|
|
|
|
|
|
i |
|
||||||
|
|
|
0 |
|
|
|
0 |
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
тогда матрицы перехода Т0 из ЛСК X1Y1Z1 |
(см. рис. 2.3) в ЛСК X0Y0Z0 (i=0) и Т1 из |
||||||||||||
ЛСК X 2Y2Z2 в ЛСК X1Y1Z1 (i=1)имеют вид:
|
cos 1 |
sin 1 |
0 |
0 |
|
|
|
cos 2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
sin 1 |
cos 1 |
0 |
0 |
|
, T |
|
sin 2 cos 1 |
|||||
|
|
|
|
|
|
sin |
|
|
|
||||
0 |
0 |
0 |
1 |
0 |
1 |
|
|
sin |
|
||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
0 |
0 |
0 |
1 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||||||
sin |
|
|
0 |
|
a |
|
|
||
|
|
|
2 |
|
|
|
1 |
|
|
cos 2 cos 1 |
sin 1 |
0 |
|
, |
|||||
cos |
2 |
sin |
1 |
cos |
1 |
S |
|
||
|
|
|
|
1 |
|
|
|||
|
0 |
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
|
||||
10
|
|
матрицы перехода Т2 |
из ЛСК X3Y3Z3 в ЛСК X 2Y2Z2 |
(i=2) и |
|||||||||||||||||||||
X3Y3Z3 (i=3): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
cos |
3 |
|
sin |
3 |
|
0 |
|
a |
2 |
|
|
|
|
cos |
4 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
T |
sin 3 cos 2 |
cos 3 cos 2 |
sin 2 |
0 |
|
, |
T |
sin 4 cos 3 |
|||||||||||||||||
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|||||
2 |
|
sin |
|
cos |
|
sin |
|
cos |
|
S |
|
|
3 |
|
|
sin |
|
||||||||
|
3 |
2 |
3 |
2 |
2 |
2 |
|
|
4 |
3 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
1 |
|
|
|
|
|
|
0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Т3 из ЛСК X 4Y4Z4 в ЛСК
sin |
|
|
0 |
|
a |
|
|
|
||
|
|
|
4 |
|
|
|
3 |
|
|
|
cos 4 cos 3 |
sin 3 |
0 |
|
, |
||||||
cos |
4 |
sin |
3 |
cos |
3 |
S |
3 |
|
||
|
|
|
|
|
|
|
||||
|
0 |
|
|
0 |
|
1 |
|
|
||
|
|
|
|
|
|
|||||
При этом полагаем, что ЛСК X 4Y4Z4 расположена на конце выходного звена 3 на месте рабочего органа, соответственно координата 4 и расположение точки А ( RA4 ) в этой ЛСК принимаются равными нулю.
Таблица параметров:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1O |
|
S1, |
|
a1, |
1O |
|
2O |
|
S2, |
|
a2, |
|
2O |
|
3O |
S3, |
a3, |
3O |
|
4O |
|
||
|
м |
|
м |
|
|
м |
|
м |
|
|
м |
м |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
10 |
|
0,7 |
|
0 |
0 |
|
90 |
|
0,2 |
|
0,35 |
|
90 |
|
20 |
0,15 |
0,6 |
90 |
|
0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R0 |
T |
R1 |
T T R2 |
T |
T T |
R3 |
T T T |
T |
R4 - вектор координат точки А в |
||||||||||||||
A |
0 |
A |
0 1 |
A |
0 |
1 2 |
A |
0 1 2 |
3 |
|
A |
|
|
|
|
|
|
||||||
неподвижной системе координат (НСК).
|
cos 1 |
|||
|
|
|
|
|
0 |
sin 1 |
|
||
RA |
|
0 |
|
|
|
|
|
||
|
|
|
||
|
|
0 |
|
|
|
|
|
||
|
cos 3 |
|
||
|
|
|
|
|
sin 3 cos 2 |
||||
sin |
|
sin |
|
|
|
|
3 |
|
2 |
|
|
0 |
|
|
|
|
|
||
sin 1 |
0 |
0 |
|
cos |
2 |
|
|
|
sin 2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos 1 |
0 |
0 |
|
sin 2 cos 1 |
|
cos 2 cos 1 |
|||||||||||||
0 |
|
1 |
0 |
|
sin |
|
sin |
|
|
cos |
|
sin |
|
||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
2 |
|
|
1 |
0 |
|
0 |
1 |
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
sin 3 |
|
|
|
0 |
|
|
|
a2 |
|
|
cos 4 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos 3 cos 2 |
|
sin 2 |
|
0 |
|
sin 4 cos 3 |
|||||||||||||
cos |
3 |
sin |
2 |
|
cos |
2 |
|
|
S |
2 |
|
sin |
4 |
sin |
3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
0 |
|
|
|
0 |
|
|
|
1 |
|
|
|
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
0 |
|
a1 |
|
|
sin 1 |
0 |
|
|
|
|
|
|||
cos |
|
S |
|
|
|
|
|||
|
1 |
1 |
|
|
0 |
|
1 |
|
|
|
|
|
||
sin 4 |
|
0 |
|
a3 |
|
|
0 |
|
0,011 |
|||||
cos 4 cos 3 |
sin 3 |
0 |
|
|
0 |
|
|
0,926 |
|
|||||
|
|
|
|
|
||||||||||
cos |
|
sin |
|
cos |
|
S |
|
|
|
0 |
|
|
1,105 |
|
|
4 |
|
3 |
|
3 |
|
3 |
|
|
|
|
|
|
|
|
0 |
|
0 |
|
1 |
|
|
1 |
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|||||||
Таким образом, координаты точки А в НСК:
xA0 0,011; yA0 0,926; z0A 1,105.