

Лекция 19. Синтез непрерывных корректирующих средств
В цифровых системах управления возможно использование всех рас- смотренных выше непрерывных корректирующих средств. Если для запретной области, соответствующей заданному показателю колебательности, выполняет- ся условие (14.1), расчет корректирующего звена может выполняться как на основе ЛАХ, так и на основе логарифмической псевдочастотной характеристи- ки непрерывной части системы. Результаты оказываются практически одинако- выми. Более удобно использование ЛАХ.
Если исходная система с ЛАХ непрерывной части L(w) не обладает не-
обходимым запасом устойчивости и для заданного показателя колебательности
M построена желаемая ЛАХ Lж(w), то ЛАХ последовательного корректирую- щего звена может быть получена вычитанием:
. (19.1)
После этого на основе Lпс(w) может быть получена передаточная функ- ция и выбрана схема и конструкция корректирующего устройства.
Рассмотрим пример синтеза цифровой системы управления со следую- щими исходными данными.
Исходная передаточная функция непрерывной части совместно с АЦП и
ЦАП:
W (p) = p(1 + t1 p)(1 +kt2 p)(1 + t3 p) ,
где t1 =0,05 с, t2 =0,003 с, t3 =0,001 с. Период дискретизации сигнала в
цифровой части T0 =0,02 с. Используется экстраполятор нулевого порядка.
. ..
Характеристики входного сигнала: gmax = 30 c−1, gmax = 15 c−2 . Требуется
обеспечить ошибку воспроизведения входного сигнала emax не выше 0,1 при допустимом показателе колебательности M=1,5.
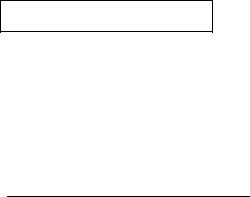
На рис. 53а показана ЛАХ исходной системы учетом запретной области на низких частотах, рассчитанной из условия обеспечения требуемой точности:
.. |
|
|
|
æ . |
ö 2 |
|
||
|
|
|
|
ç g |
÷ |
|
||
wэ = |
gmax |
= |
15 |
= 0,5 c |
−1, L(wэ ) = 20 lg |
è |
max ø |
= |
|
30 |
|
.. |
|||||
. |
|
|
|
|
|
|||
|
gmax |
|
|
|
|
emax gmax |
|
|
|
|
|
|
= 20 lg600 = 55,6дБ , |
|
|
||
|
|
|
|
w0 |
= 12 c−1. |
|
|
|
73
Соответственно требуемое значение коэффициента передачи разомкнутой сис- темы k=300 c-1.
Поскольку условие (16.1) для по-
стоянной времени τ1 не выполняется, синтез системы cледует выполнять на основе желаемой ЛАХ (рис. 45).
Постоянные времени, формирую- щие изломы желаемой ЛАХ:
|
|
|
|
T |
|
|
= |
1 |
|
= 2 c, |
||||
|
|
|
|
|
|
|||||||||
|
|
|
1 |
|
|
|
ωэ |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
T2 = |
1 |
|
|
|
|
M |
|
= 0,14 c, |
||||||
|
ω0 |
|
|
M − 1 |
||||||||||
|
|
|
|
|
|
|
||||||||
|
T3 = |
T2τ1 |
= 0,0035 c. |
|||||||||||
|
|
|||||||||||||
|
|
|
|
|
|
T1 |
|
|
|
|
||||
Частота |
среза |
желаемой ЛАХ: |
||||||||||||
ωc = k |
T2 |
|
= 21c |
|
−1 |
. |
|
|
|
|||||
T1 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Полученная желаемая ЛАХ пока-
зана на рис. 53а пунктиром. Соотношение (16.6) с учетом величины T0 2 вы-
полняется.
ЛАХ корректирующего устройства, полученная в соответствии с (19.1), показана на рис. 53б. Таким образом, для обеспечения требуемой точности в
систему должно быть добавлено последовательное корректирующее устройство интегро-дифференцирующего типа с передаточной функцией:
W (p) = (1+ T2 p)(1+ τ1 p) . (1+ T1 p)(1+ T3 p)
На основе формул перехода (18.1) также могут быть синтезированы па- раллельное корректирующее устройство или обратная связь.
Лекция 20. Синтез компьютерного управления
Закон управления или корректирующее звено, обеспечивающие решение системой ее задач и необходимое качество процесса управления, могут быть реализованы в виде алгоритма в цифровой части системы (управляющем ком- пьютере).
Требуемый алгоритм управления определяется дискретной передаточной функцией цифровой части D(z), как это показано в лекции 9.
74

Если для системы, структура которой соответствует рис. 34, известна дискретная передаточная функция непрерывной части Wн(z) и найдена желае- мая дискретная передаточная функция разомкнутой системы Wж(z), то переда-
точная функция цифровой части может быть определена как отношение
D(z) = |
W |
(z) |
|
|
|
ж |
. |
(20.1) |
|
W |
н (z) |
|||
Вместо (20.1) на практике чаще применяется метод синтеза цифровой части на основе частотных характеристик. При этом управляющий компьютер рассматривается как последовательное корректирующее устройство, переда- точная функция которого D(z)=Wпс(z), может быть найдена через дискретные частотные передаточные функции:
W п с( jl) = |
W ж ( jl) |
, |
(20.2) |
|
W н ( jl) |
||||
|
|
|
или соответствующие им логарифмические псевдочастотные характеристики:
|
Lп с(l) = Lж (l) - Lн (l). |
2w |
|
(20.3) |
||
Если найдена W |
( jl), далее подстановками jl = |
|
и w = |
z − 1 |
|
|
|
|
|||||
|
п с |
T0 |
|
z + 1 |
||
|
|
|
||||
можно перейти к D(z) и алгоритму компьютерного управления.
При использовании соотношений (20.1) - (20.3) следует иметь в виду сле- дующие ограничения:
-в число нулей и полюсов желаемых передаточных функций системы должны входить все нули и полюсы передаточных функций непрерывной час- ти, лежащие за пределами области устойчивости (рис. 28 или 29 соответствен- но);
-степень числителя получаемой передаточной функции цифровой части не должна быть выше степени ее знаменателя.
Рассмотрим синтез управляющего алгоритма на примере.
Пусть в системе компьютерного управления с экстраполятором нулевого порядка передаточная функция непрерывной части совместно с ЦАП и АЦП имеет вид:
W н (p) = pk2 .
Дискретные передаточные функции и частотные характеристики непре- рывной части будут иметь вид:
W н (z) = |
z - 1 |
ì k |
ü |
|
kT02 (z + 1) |
|
||
|
|
Z í |
|
ý |
= |
|
, |
|
z |
|
2(z - 1)2 |
||||||
|
î p3 |
þ |
|
|
||||
75

|
æ |
|
|
T |
ö |
|
|
|
|
||
|
kç |
1 |
- j |
|
0 |
|
l÷ |
|
|
||
|
2 |
|
|
||||||||
W н ( jl) = |
è |
|
|
ø |
, |
|
|
||||
|
|
( jl)2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
Lн (l) = 20lg k + 20lg 1 + |
T 2 |
|
l2 - 40lg l, |
|
|
||||||
0 |
|
|
|
||||||||
4 |
|
T0 |
|
||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
yн (l) = -180o - arctg |
l . |
|||||||
|
|
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
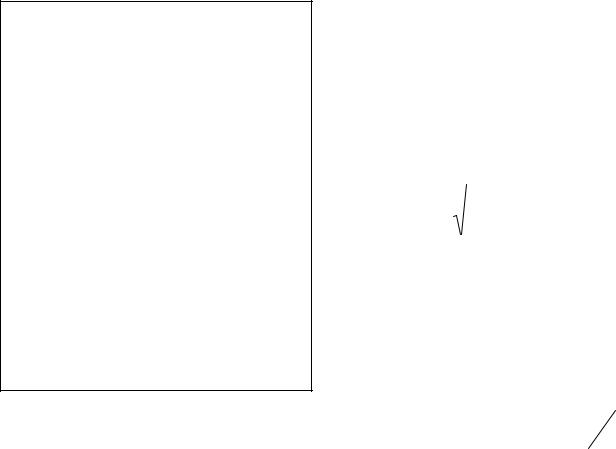
Логарифмические псевдочастот-
ные характеристики непрерывной части показаны на рис. 54а. Ясно, что при простейшем законе управления на осно- ве отрицательной обратной связи замк- нутая система будет неустойчива. Син- тез закона управления может быть вы- полнен аналогично синтезу корректи- рующего устройства. Выберем желае- мую ЛАХ в виде, показанном на рис. 54а пунктиром. Желаемая дискретная частотная передаточная функция ра- зомкнутой системы имеет вид:
|
|
|
|
æ |
|
|
|
T |
0 |
ö |
|
|
|
k(1 + jT l)ç |
1 |
- j |
|
l÷ |
|||||||
2 |
||||||||||||
W ж ( jl) = |
|
1 |
|
è |
|
|
|
ø |
, |
|||
( jl) |
2 æ |
|
|
|
|
T |
|
ö |
|
|||
|
ç |
1 |
+ j |
0 |
l÷ |
|
|
|||||
2 |
|
|
||||||||||
|
|
è |
|
|
|
|
|
ø |
|
|
||
а для последовательного корректирующего устройства получим:
W п с( jl) = |
1 + jT1λ |
. |
|||
1 + j |
T0 |
l |
|||
|
|
||||
|
|
|
|||
|
2 |
|
|
||
ЛАХ последовательного корректирующего устройства показана на рис. 54б. Требуемое значение T1 рассчитывается по формуле (15.4).
Указанными выше подстановками перейдем к дискретной передаточной функции цифровой части:
W п с(w) = T0 +( 2wT)1 , T0 1 + w
76
|
|
|
|
T0 |
+ 2 |
z − 1 |
T1 |
|
|
(T |
|
+ 2T |
)z + (T |
|
- 2T |
) |
|
|
|
|||||||
|
|
|
|
|
|
|
|
0 |
0 |
|
−1 |
|
||||||||||||||
D(z) = W п с(z) = |
|
|
|
|
|
z + 1 |
= |
|
1 |
2T z |
1 |
|
= b0 + b1z |
, |
||||||||||||
|
|
|
æ |
|
|
|
z - 1ö |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
T |
0 |
ç1 |
+ |
|
|
|
÷ |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
è |
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
z + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
где b = 0,5 + |
T1 |
, |
b |
= 0 |
,5 - |
T1 |
. |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
0 |
T0 |
|
|
1 |
|
|
|
|
|
T0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
В результате получен следующий алгоритм компьютерного управления:
u[n] = b0 x[n]+ b1x[n - 1].
В общем случае дискретная передаточная функция цифровой части мо- жет быть получена в виде:
|
b0 |
+ |
b1z |
−1 + + |
−l |
U(z) |
||
D(z) = |
|
... blz |
|
= |
|
, |
||
a0 + a1z−1 +...+amz −m |
X (z) |
|||||||
Соответствующий алгоритм управления, который должен быть реализо- ван в управляющем компьютере, получается в виде рекуррентного соотноше- ния:
u[n] = |
b0 |
x[n] + |
b1 |
x[n − 1]+...+ |
|
bl |
x[n − l] |
− |
a1 |
|
u[n − 1]−...− |
am |
u[n − m]. |
||||||||||||||||||||||||||
|
|
|
|
|
a |
|
|
||||||||||||||||||||||||||||||||
|
a |
|
a |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
||||||||||
0 |
|
0 |
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|||||||||||
В таблице 3 приведены некоторые алгоритмы управления и коррекции |
|||||||||||||||||||||||||||||||||||||||
систем с соответствующими передаточными функциями. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Таблица 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Непрерывный |
|
Дискретная |
|
|
|
Частотная |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Тип звена |
|
|
аналог |
|
передаточная |
|
|
передаточная |
|
|
|
Алгоритм |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
функция |
|
|
|
|
|
функция |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Дифференци- |
|
|
|
|
|
|
|
|
z − a |
|
|
|
|
|
|
|
1+ jτλ |
, |
|
|
u[n] = b0 x[n] + |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
1+ Tp |
|
|
|
, |
|
|
|
|
1+ j |
T0 |
|
l |
|
|
|
+b x[n - 1], |
|||||||||||||||||||||
рующее |
|
|
|
|
|
(1 - a)z |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b = (1 − a)−1 , |
||||||||
|
|
|
|
|
|
|
|
|
0 < a ≤ 1 |
|
|
|
|
|
|
(1+ a)T0 |
|
0 |
|
|
|
a |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
t = |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2(1- a) |
|
|
|
b1 = − |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1− a |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Пассивное |
|
|
1+ T1 p |
|
|
(1- b)(z - a) |
|
|
|
|
1+ jτ1λ |
, |
|
|
u[n] = b0 x[n] + |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
дифференци- |
|
|
, |
|
, |
|
|
|
1+ jt2l |
|
|
|
+b1x[n - 1]- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
(1- a)(z - b) |
|
|
|
|
|
||||||||||||||||||||||||||||||
рующее |
|
|
1+ T2 p |
|
|
|
|
|
|
|
|
(1+ a)T0 |
|
|
|
-a u[n - 1], |
|||||||||||||||||||||||
|
|
|
|
|
T1 > T2 |
|
0 < b < a < 1 |
t1 = |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
2(1- a) |
|
|
|
b0 = |
1− b |
, |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ2 |
= |
|
|
(1+ b)T0 |
|
|
|
1 |
− a |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 = ab0 , |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2(1 |
− b) |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 = −b |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
77