

^ |
^ |
|
|
|
при фиксированных X и |
Ψ , соответствующих экстремуму, и соблюдении ус- |
|||
ловий трансверсальности. |
|
|
|
|
Обычно область С определяется неравенствами вида: |
||||
uj |
|
≤ uj |
≤ uj |
, j=1,2,...,r. |
min |
|
max |
||
Оптимальное управление на основе (24.11) может быть получено в сле- дующих вариантах:
- как локальный экстремум внутри области C в соответствии с условиями
(24.7);
|
|
^ |
= uj |
|
|
- как абсолютный экстремум на границе области С ( u j |
или |
||
^ |
|
|
min |
|
= uj |
|
|
|
|
u j |
); |
|
|
|
|
max |
|
|
|
- как кусочно-непрерывная функция, на отдельных временных интервалах совпадающая с границами, а на других - принимающая значения внутри облас- ти C.
В последнем случае для точек разрыва управления (при t=t*) следует
учитывать недопустимость скачкообразного изменения переменных состояния объекта управления:
x i (t*+0 ) = x i (t*−0 ), i=1,2,...n ; |
(24.12) |
и условия Вейерштрассе-Эрдмана: |
|
ψ i (t*+0 ) = ψ i (t*−0 ), i=1,2,...n; H (t*+0 ) = H (t*−0 ). |
(24.13) |
В заключение отметим, что для достижения максимума функционала (24.2) потребуется достижение минимума функции Гамильтона. Кроме того,
аналогичный принцип может быть сформулирован и использован для функции Лагранжа (принцип минимума).
Лекция 25. Синтез системы стабилизации, оптимальной по быстродействию
Расссмотрим линейный объект управления, описываемый системой урав- нений (23.1). Требуется определить программу управления U(t)=(u1(t), u2(t),..., ur(t)) и построить контур управления, обеспечивающие стабилизацию объекта управления за минимальное время T. Граничные условия фиксирован-
ные: xi(0)=xi0, i=1,2,...,n; |
|
|
|
|
. Заданы ограни- |
чения на управление: |
|
uj |
|
≤ ujmax , j=1,2,...,r. |
(25.1) |
|
|
|
|||
|
|
|
Оптимизированный функционал вводится в рассматриваемой задаче сле- дующим образом:
91

T |
|
J(X ,U ) = T = ò1× dt ® min . |
(25.2) |
0
Составим функцию Гамильтона:
n .
H = -1 + åyi x i
i=1
n |
æ |
n |
= -1 + åyi çç |
åaij x j |
|
i=1 |
è j=1 |
|
r
+ å
l=1
ö
b u ÷ .
il l ÷ø
Рассмотрим сначала случай, когда есть одна составляющая сигнала управления:
n |
. |
n |
æ |
n |
ö |
n |
H = -1 + åyi x i = -1 |
+ å |
ççyi åaij x j ÷÷ |
+ uåyibi . (25.3) |
|||
i=1 |
|
i=1 |
è |
j=1 |
ø |
i=1 |
Поскольку в соответствии с принципом максимума все переменные, кро- ме u, в (25.2) принимаются фиксированными, при поиске оптимального управ- ления в (25.2) можно пренебречь всеми слагаемыми, не содержащими u:
n
u = arg max åyibi . i=1
Очевидно, что максимум такого выражения достигается при n
u(t) = umax signåbiyi (t), то есть оптимальное управление является релей-
i=1
ным с переключениями между двумя значениями:
при
u(t) = umin при
n
åbiyi (t) > 0 ,
i=1
n
åbiyi (t) < 0 .
i=1
Для случая векторного управления аналогично можно получить, что при ограничениях вида (20.1) каждая составляющая оптимального вектора управ- ления линейным объектом определяется соотношением:
n
uj (t) = ujmax signåbij yi (t). (25.4) i=1
Теорема об n интервалах (теорема Фельдбаума): если собственные числа матрицы A линейного объекта управления вещественные и область управления ограничена неравенствами вида (25.1), то каждая составляющая uj оптимально- го по быстродействию управления кусочно-постоянна и имеет не более n-1 пе- реключения между значениями ujmax и −u jmax , где n - порядок системы.
92

Кроме того, доказано, что для линейной системы, у которой все собст- венные числа матрицы A лежат в левой полуплоскости, всегда может быть оп- ределено оптимальное по быстродействию управление, если только границы допустимых значений всех составляющих управляющего сигнала имеют раз-
ный знак: signuj |
= −signuj |
min |
. |
|
|
max |
|
|
|
|
|
Рассмотрим пример для объекта управления, описываемого системой |
|||||
уравнений второго порядка: |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
x 1 |
= x 2 , |
|
|
|
|
. |
|
= u |
|
|
|
x 2 |
||
при наличии ограничения u £ umax .
Требуется построить управление u=u(x1,x2), переводящее объект из произвольного заданного начального состояния (x10, x20) в состояние (0, 0) за
минимальное время T. |
|
|
|||
|
Найдем собственные числа матрицы A. Для этого нужно решить уравне- |
||||
ние: |
|
, где I - единичная матрица. Для заданного объекта урав- |
|||
нение |
|
|
|
|
|
примет вид: |
l |
-1 |
|
||
|
|
|
= l2 = 0 . |
||
|
|
0 |
l |
||
Собсвенные числа матрицы l1=l2=0. Порядок системы n=2. Следова- тельно, в соответствии с теоремой об n интервалах, оптимальное управление кусочно-постоянно и может иметь не более одного переключения. Возможные варианты управления:
1.u = umax , t Î[0,T ).
2.u = −umax , t Î[0,T ).
|
|
|
ì umax |
t Î[0,t) |
|
|
|
||
|
3. u = í-u |
t Î(t,T ). |
|
|
|
||||
|
î |
max |
t Î[0,t) |
|
|
|
|||
|
|
|
ì-u |
|
|
|
|||
|
4. u = í u max |
t Î(t,T ). |
|
|
|
||||
|
î |
max |
|
|
|
|
|
||
|
Определим вид процесса в системе при двух возможных значениях сиг- |
||||||||
нала управления. |
|
|
|
|
|
||||
|
Для |
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
x 2 (0) = C1 = x 20 , |
x 2 = umax t + x 20 , |
||
|
|
|
x 2 = umax t + C1 , |
||||||
x 1 |
= |
umax t 2 |
+ C1t + C2 , |
x 1(0) = C2 = x 10 , |
x 1 = |
umax t 2 |
+ x 20t + x 10 . |
||
|
|
||||||||
|
2 |
|
|
|
2 |
|
|||
93
Исключим время из этих уравнений:
|
x |
2 |
− x |
20 |
|
u |
max |
æ x |
2 |
- x |
20 |
ö |
2 |
x |
2 |
- x |
20 |
|
|
|
t = |
|
|
, x 1 = |
|
ç |
|
|
÷ |
+ x 20 |
|
|
+ x10 |
, |
|||||||
|
umax |
|
|
|
|
umax |
|
|
umax |
|
||||||||||
|
|
|
|
|
2 è |
|
|
ø |
|
|
|
|
|
|||||||
|
|
1 |
æ x 2 |
|
|
x 2 |
2 |
ö |
|
1 |
2 |
2 |
|
|
|
|
ç |
2 |
|
|
20 |
÷ |
|
|
|||
x 1 - x10 |
= |
|
ç |
|
- x 2x 20 |
+ |
|
+ x 2x 20 - x 20 |
÷ |
= |
|
(x 2 |
- x 20 ). |
|
2 |
2 |
2umax |
||||||||||
|
|
umax è |
|
|
|
ø |
|
|
|
||||
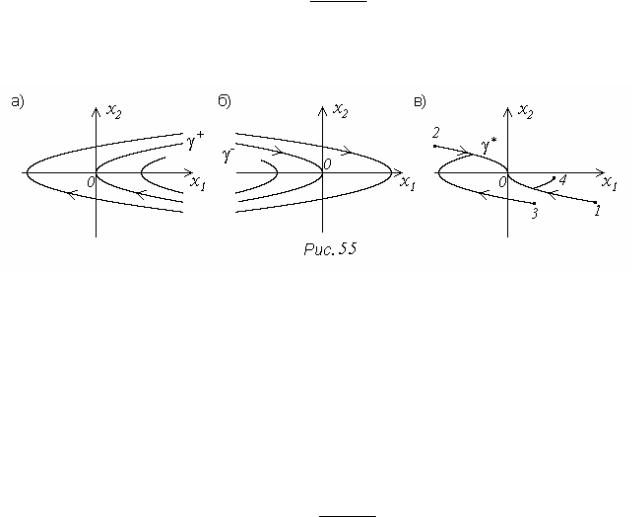
Соответствующие фазовые траектории (рис. 55а) будут представлять со- бой параболы, причем одна из них, уравнение которой
x 2
x 1 = 2u 2 ,
max
проходит через начало координат. Ее обозначим g+.
Для |
|
: |
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
t2 |
|
|
|
|
|
|
|
x |
20 |
− x |
2 |
|
|
x |
2 |
= −u |
|
t + x |
20 |
, |
x = - max |
+ x |
20 |
t + x |
|
, |
t = |
|
|
|
, |
||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
max |
|
|
|
|
1 |
|
2 |
|
10 |
|
|
|
|
|
umax |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
-1 |
æ x 2 |
|
|
|
|
x 2 |
|
|
|
|
2 |
ö |
|
|
-1 |
2 |
2 |
|||||||
|
|
|
|
ç |
2 |
|
|
|
|
20 |
|
|
|
|
÷ |
|
|
|
|
|
|||||||
x1 - x10 |
= |
|
ç |
|
|
- x 2 x 20 + |
|
|
+ x 2 x 20 |
- x 20 |
÷ |
= |
|
|
|
|
(x 2 |
- x 20 ). |
|||||||||
|
2 |
2 |
|
2umax |
|||||||||||||||||||||||
|
|
|
umax è |
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|||||||||
Соответствующие фазовые траектории (рис. 55б) будут иметь вид пара- бол, причем g− описывается уравнением
x 2 x1 = - 2u 2
max
и проходит через начало координат.
Таким образом, если точка (x10, x20), соответствующая начальным усло- виям, будет лежать на кривой g+ (рис. 55в), оптимальное по быстродействию управление будет иметь вид 1; если (x10, x20) окажется на кривой g− - вид 2; левее кривой γ , объединяющей g+ и g− - вид 3; правее кривой g - вид 4.
94
В первых двух случаях переключение отсутствует, в последних двух - имеет место одно переключение в момент времени, когда фазовая траектория
достигает кривой g . Следо-
вательно, кривая g является на фазовой плоскости (рис. 55) линией переключения для оптимального управле-
ния. Уравнение кривой g
дает условие переключения для оптимального управле- ния:
x1 = - x22u× x 2 .
max
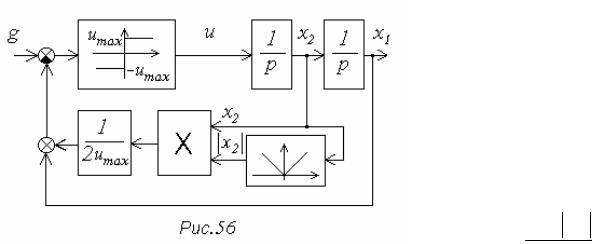
Теперь можно записать уравнение оптимального по быстродействию за- кона управления следующим образом:
^ |
|
|
|
|
æ |
|
|
|
x |
|
× |
|
x |
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
u(x |
1 |
,x |
2 |
) = u |
signç |
-x |
1 |
- |
|
2 |
|
|
|
2 |
|
|
÷ . |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
max |
è |
|
|
2umax |
ø |
||||||||||
|
|
|
|
|
|
|
|
||||||||||
Структурная схема оптимальной по быстродействию системы стабилиза- ции показана на рис. 56.
95