

Лекция 2. Передаточные функции и частотные характеристики динамических звеньев
Для линейных стационарных моделей, помимо дифференциальных урав- нений, применяется математический аппарат передаточных функций (ПФ) и частотных характеристик, дающий более широкие возможности анализа каче- ства системы. Кроме того, этот математический аппарат служит основой де- тально разработанных и удобных для использования “классических” методов проектирования систем управления.
Аппарат передаточных функций основан на использовании преобразова- ния Лапласа для временных функций, описывающих процессы в моделируемой системе:
∞
Y(p) = L[y(t)] = ò y(t)e− pt dt ,
0
где Y(p) = L[y(t)] - изображение по Лапласу функции времени (оригинала)
y(t).
Передаточной функцией системы или ее части (звена) называется отно- шение изображений выходного и входного сигнала при нулевых начальных ус- ловиях и при отсутствии других входных сигналов. Если имеется несколько входных или выходных сигналов, то должен быть определен набор передаточ- ных функций от каждого входа к каждому выходу.
Например, для модели в форме уравнения n-го порядка
a |
|
d n x(t) |
+ a |
d n−1x(t) |
+K+a |
|
x(t) = b |
d m g(t) |
+K+b g(t), |
0 dt n |
|
|
|
||||||
|
1 dt n−1 |
|
n |
0 dt m |
m |
||||
с учетом теоремы дифференцирования, известной для преобразования Лапласа, получается передаточная функция:
W(p) = |
X(p) |
|
b pm + b pm−1 |
+K+b |
p + b |
||
|
= |
0 |
1 |
m−1 |
m |
. |
|
G(p) |
|
|
|
|
|||
|
|
a0 pn + a1 pn−1+K+an−1 p + an |
|||||
Для модели в форме системы уравнений 1-го порядка или в соответст- вующей векторной форме передаточные функции определяются путем перехо- да от функций времени к изображениям и решения получаемой системы алгеб- раических уравнений. Например, модель ЛА как объекта управления задается уравнениями:
dθ |
= Kϑ − Kθ, |
dϑ |
= ωz , |
dωz |
= Lθ − Lϑ − Mω z − Nδв . |
dt |
dt |
|
|||
|
|
dt |
|||
Входным сигналом здесь является δв , а в качестве выходных могут рас- сматриваться θ, ϑ , ω z или α. Перейдем к изображениям:
8
pθ(p) = Kϑ(p) − Kθ(p),
pϑ(p) = ωz (p),
pω z (p) = Lθ(p) − Lϑ(p) − Mωz (p) − Nδв (p).
Передаточные функции находят решением полученной системы алгеб- раических уравнений относительно отдельных переменных:
|
|
|
|
|
|
|
|
pθ(p)+ Kθ(p)− Kϑ(p) = 0, |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
pϑ(p) − ωz (p) = 0 , |
|
|
|
|
|
|
|
||||||||||
|
|
−Lθ(p) + Lϑ(p) + pωz (p) + Mωz (p) = −Nδв (p), |
|
|
|||||||||||||||||||||||
W θ (p) = |
θ(p) |
= |
1 , W ϑ |
(p) = |
|
ϑ(p) |
= |
|
2 , W |
ω (p) = |
ωz (p) |
|
= 3 |
, |
|||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
δ |
|
δв(p) |
|
|
|
|
|
|
δ |
|
|
|
δв (p) |
δ |
|
δв (p) |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
p + K |
−K |
|
|
0 |
|
= p3+(K + M)p2 + (KM + L)p, |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
= |
0 |
|
|
p |
|
|
−1 |
|
|
|
||||||||||||||||
|
|
|
−L |
|
L |
p + M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
0 |
−K |
0 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
1 = |
|
0 |
p |
|
−1 |
= −KN , |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
−N L |
|
p + M |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
p + K |
0 |
|
|
|
0 |
|
|
= −N(p + K), |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
2 = |
0 |
|
|
|
0 |
|
|
|
−1 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
−L |
|
|
−N |
|
p + M |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
3 = |
|
p + K |
−K |
|
0 |
|
= −Np(p + K), |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
0 |
|
|
p |
|
0 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
−L |
L |
|
−N |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
W θ (p) = |
|
|
|
|
|
|
−KN |
|
|
|
, |
|
|
|
|
||||||||
|
|
|
|
p[p2 + (K + M )p + KM + L] |
|
|
|
|
|||||||||||||||||||
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
W ϑ (p) = |
|
|
|
|
|
|
−N(p + K) |
|
|
, |
|
|
|
|
|||||||||
|
|
|
|
p[p2 + (K + M )p + KM + L] |
|
|
|
|
|||||||||||||||||||
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
W ω (p) = |
|
|
|
|
|
−N(p + K) |
|
. |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
δ |
|
|
p2 + (K + M)p + KM + L |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Одно из важнейших достоинств передаточных функций состоит в том, что переход к другим сигналам, различная компоновка и преобразование структуры системы на языке передаточных функций сводятся к несложным ал-
9
гебраическим операциям. Так для получения ПФ для сигнала a достаточно ис- пользовать его связь с сигналами υ и θ:
W α (p) = |
ϑ(p) − θ(p) |
= W ϑ (p) −W θ (p) = |
−N |
. |
|
|
|
||||
δ |
δв (p) |
δ |
δ |
p2 + (K + M)p + KM + L |
|
|
|
|
|
||
С аппаратом передаточных функций непосредственно связан аппарат частотных характеристик. В частности, амплитудно-частотная и фазо-частотная характеристики звена или системы, имеющие четкий физический смысл и ши- роко применяемые при проектировании реальных устройств, определяются не- посредственно по передаточной функции.
Сначала определяется частотная передаточная функция (ЧПФ), связанная с преобразованием Фурье:
W( jω) = W(p) p = jω .
Затем амплитудно-частотная характеристика определяется как модуль ЧПФ, а фазо-частотная характеристика - как ее аргумент:
A(ω) = W( jω) , ψ(ω) = argW( jω).
Кроме того при решении задач анализа и синтеза систем используются:
-вещественная частотная характеристика (ВЧХ) U(ω)= Re W(jω),
-мнимая частотная характеристика (МЧХ) V(ω)= Im W(jω),
- логарифмическая амплитудная характеристика L(ω) = 20 lg A(ω),
ψ(ω).
Последние две характеристики строятся в полулогарифмическом мас- штабе по специальным правилам. Это обеспечивает простоту их построения
даже для сложных передаточных функций и получение простых процедур для решения многих задач анализа и синтеза систем управления.
Лекция 3. Структурно-динамическая схема системы. Типовые соединения динамических звеньев. Передаточные функции замкнутых систем
Структурно-динамическая
схема системы отображает динамические свойства звеньев (как правило, с помощью их передаточных функций) и взаи- мосвязь между ними.
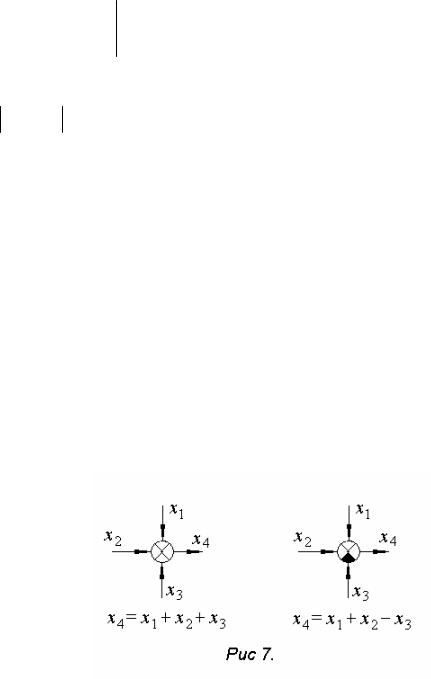
Для отображения сложения и вычитания сигналов используют специальные обозначения – сумма- торы (рис. 7).
10
В системах управления встречаются три вида соединений звеньев: Последовательное соединение – выходной сигнал предыдущего звена
подается на вход последующего (рис. 8).
Выходной сигнал последовательно соединенных звеньев определяется
как Y(p)=Wn(p)Yn-1(p)=…=W1(p)W2(p)…Wn(p)X(p), следовательно, резуль-
тирующая передаточная функция последовательно соединенных звеньев равна произведению передаточных функций составляющих звеньев:
n
W ( p) = ÕWi .
i=1
Параллельное соединение (рис. 9) – на входы всех звеньев подается од- но и то же входное воздействие, а выходной сигнал определяется как алгеб-
раическая сумма выходных сигналов отдельных звеньев (с учетом знаков на входах сумматора):
Y(p)=Y1(p)+Y2(p)+…+Yn(p)= =W1(p)X(p)+W2(p)X(p)+…+Wn(p)X(p).
Результирующая передаточная функция параллельно соединенных звеньев равна сумме передаточных функций составляющих звеньев:
n
W ( p) = åWi
i=1
Отрицательная обратная связь (рис. 10а).
Составим уравнения, связывающие входные и выходные сигналы звеньев цепи через передаточные функции:
X2(p)=W(p)X(p), Xос(p)=Wос(p)X2(p)
и дополним их уравнением сумматора: X(p)=X1(p)-Xос(p). Исключив из со- ставленных уравнений внутренние сигналы цепи, придем к передаточной
функции:
11
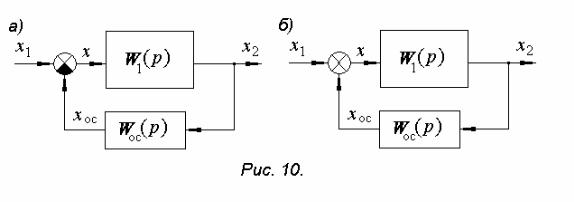
W ( p) = |
W1( p) |
|
|
|
. |
(3.1) |
|
1+W ( p)W ( p) |
|||
|
ос 1 |
|
|
Положительная обратная связь (рис. 10б). Аналогично предыдущему случаю можно получить:
W ( p) = |
W1( p) |
|
|
. |
|
1−W ( p)W ( p) |
||
|
ос 1 |
|
В замкнутой системе управление обеспечивается, прежде всего, на осно- ве главной обратной связи (ОС). Помимо главной обратной связи в системе управления могут присутствовать местные обратные связи, охватывающие от- дельные фрагменты структуры схемы. Необходимость их выделения может быть обусловлена принципом действия реального элемента системы. Кроме того местные ОС, а также различные виды главной ОС могут искусственно вводится для повышения качества процесса управления.
Обратная связь может быть положительной, если сигнал xос, снимаемый с выхода ОС, суммируется с сигналом x1 на входе, и отрицательной (ООС), ес-
ли xос вычитается.
Главная обратная связь, как правило, отрицательная.
Кроме того, обратные связи могут быть жесткими и гибкими.
ОС называется гибкой, если она обладает собственными динамическими свойствами. Передаточная функция Wос(p) является функцией оператора Лап- ласа p.
Для жесткой обратной связи передаточная функция – константа:
Wос(p)=kос. В частном случае kос=1 – единичная ОС.
В системе управления могут присутствовать несколько входных сигна- лов: одно или несколько задающих воздействий g, одно или несколько возму- щающих воздействий f, причем разные входные сигналы могут поступать в различные точки системы. В таких случаях необходимо находить передаточ- ную функцию для каждого входного сигнала.
При анализе точности системы рассматривается сигнал ошибки:
12
x(t) = g(t) − y(t) ). |
(3.2) |
Для него также требуется определение передаточных функций, соответствую- щих каждому входному сигналу.
Таким образом, при описании замкнутой системы всегда приходится рас- сматривать набор различных передаточных функций.
Сформулированное выше для динамических звеньев определение переда- точной функции распространяется и на систему управления в целом, но для замкнутой системы рассматриваются определённые виды передаточных функ- ций и используются соответствующие правила их получения.
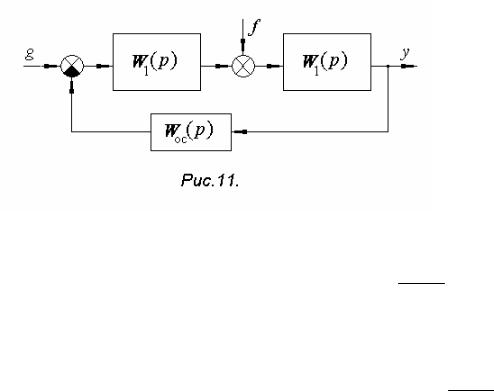
Рассмотрим их на достаточно простом, но общем примере (рис. 11).
Для задающего воздействия рассматриваются следующие передаточные функции.
Передаточная функция разомкнутой системы: W ( p) = GY((pp)) (без учета
главной обратной связи). Для примера на рис. 11 получим:
W ( p) = W1(p)W2 (p).
Основная передаточная функция замкнутой системы: Φ( p) = GY ((pp)) (для
системы |
в целом). Для рис. 11 с учетом |
(3.1) получим: |
||||
Φ( p) = |
W ( p) |
|
|
|
||
|
. |
|
|
|
||
1+W (p)W ( p) |
|
|
|
|||
|
ос |
|
X ( p) |
|
||
Передаточная функция замкнутой системы по ошибке: |
Φx ( p) = |
. |
||||
|
||||||
|
|
|
|
G( p) |
||
С учетом (3.2) получим: Φx ( p) = G( p) −Y ( p) =1− Y ( p) =1− Φ( p) .
G( p) G( p)
Отметим важный результат: для передаточных функций замкнутой сис- темы Φ( p) + Φx ( p) =1. Это соотношение получено исключительно на основе определений, следовательно, справедливо при любой структуре системы.
13