


u0 [n] = b0 x0 [n] + b1x0 [n − 1]+...+bl x0 [n − l] − |
|
−a1u0 [n − 1] − a2 u0 [n − 2]−...−am u0 [n − m]. |
(13.5) |
Как видно из (13.5), для формирования сигнала управления необходимо текущее значение сигнала ошибки, а также l его предыдущих значений и m предыдущих значений сигнала управления. Для их хранения используется опе- ративная память компьютера.
Лекция 14. Синтез системы управления. Обеспечение точности системы
Существуют два основных принципа синтеза систем управления:
-построение системы с обеспечением заданных требований к показателям
еекачества;
-построение системы, характеристики которой оптимальны в некотором смысле.
При использовании первого принципа, как правило, требуется обеспечить заданные точность и запас устойчивости системы.
Здесь рассмотрим наиболее простую и распространенную на практике методику, основанную на использовании частотных характеристик разомкну- той части системы.
Достоинством этой методики является единообразие синтеза непрерыв- ных и компьютерных систем, достигаемое благодаря анализу диапазонов час- тот, соответствующих ограничениям
ω ≤ |
2 |
|
или λ ≤ π |
, |
(14.1) |
||||
|
|
T0 |
2 |
|
|
2T0 |
|
||
где ω - реальная частота сигнала, |
λ = |
tg |
ωT0 |
|
- абсолютная псевдочастота, |
||||
|
2 |
|
|||||||
|
|
|
|
T0 |
|
|
|
||
T0 - период дискретизации по времени в системе с компьютерным управлени- ем. Как отмечалось ранее, при выполнении указанных условий имеет место 
 , и частотные характеристики непрерывной и компьютерной систем практически совпадают. Поэтому все положения методики синтеза и основные расчетные соотношения, разработанные для непрерывных систем, удается ис- пользовать без существенных изменений для компьютерных систем.
, и частотные характеристики непрерывной и компьютерной систем практически совпадают. Поэтому все положения методики синтеза и основные расчетные соотношения, разработанные для непрерывных систем, удается ис- пользовать без существенных изменений для компьютерных систем.
Если в компьютерной системе управления не удается обеспечить доста- точно малую для выполнения (14.1) величину периода дискретизации, преду-
сматривается возможность определения его допустимой величины или учет его реальной величины при расчете характеристик контура управления.
Наиболее простым, наглядным и широко используемым критерием точ- ности является максимальная ошибка системы при типовом входном сигнале.
54
Ошибкой, или сигналом ошибки, системы управления называется раз- ность x(t) = g(t) − y(t) или x[n] = g[n]− y[n] для решетчатых функций, где
g - задающее воздействие, y - выходной сигнал системы.
Наиболее общий случай, рассматриваемый при синтезе системы - гармо- нический входной сигнал g(t) = gmax sin(ω gt + ϕ g ). Выходной сигнал и сиг- нал ошибки в линеаризованной системе также будут гармоническими. Если из- вестна передаточная функция разомкнутой системы W(p) и главная обратная связь в системе единичная, амплитуда сигнала ошибки определяется следую- щим образом:
x max = |
|
Фx (jω g ) |
|
gmax = |
|
|
|
gmax |
|
|
, |
(14.2) |
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
+W (jω g ) |
|
|
|||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
где Фx - передаточная функция замкнутой системы по ошибке. В реальных
системах обычно обеспечивается |
|
W (jω g ) |
|
>> 1, и формула (14.2) может быть |
||||||||
|
|
|||||||||||
заменена приближенной: |
|
|
|
gmax |
|
|
|
|
||||
x max |
≈ |
|
|
|
|
. |
(14.3) |
|||||
|
|
W (jω g ) |
|
|
||||||||
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
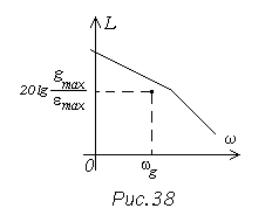
Формула (14.3) позволяет установить требования к низкочастотной части ЛАХ разомкнутой системы. Для того, чтобы максимальная ошибка замкнутой
системы при гармоническом воздействии не превышала заданного значения
εmax, ЛАХ разомкнутой системы должна проходить выше контрольной точки с координатами (рис. 38):
ω = ωg , L(ω g ) = 20 lg |
|
W (jω g ) |
|
= 20 lg |
gmax |
. |
(14.4) |
|
|
||||||
|
|
|
|||||
|
|
|
|
|
εmax |
|
|
|
|
|
|
|
|
||
монический сигнал
. |
.. |
gmax |
= ωэ gэmax и gmax |
Для входного сигнала произвольного вида, в том числе случайного, требования к ЛАХ синтезируемой системы могут быть по- лучены аналогичным способом, если извест-
ны максимально возможные значения первой
.
производной (скорости) gmax и второй про-
..
изводной (ускорения) gmax входного сигна-
ла. Для заданных значений этих характери- стик можно подобрать эквивалентный гар-
gэ (t) = gэmax sin(ωэt + ϕэ ) |
из |
условий: |
= ω2э gэmax . В результате можно получить:
55
|
|
æ . |
|
2 |
|
.. |
|
|
|
|
1 |
ö |
|
g |
max |
|
|
||
gэ max = |
ç g |
÷ |
, |
wэ = |
|
. |
(14.5) |
||
.. |
. |
|
|||||||
|
è |
max ø |
|
|
|
|
|
||
|
gmax |
|
|
|
|
gmax |
|
||
Теперь при заданной максимальной допустимой ошибке emax в соответ- ствии с (14.4) могут быть получены координаты контрольной точки:
|
|
|
.. |
|
|
|
|
|
|
|
|
|
æ . |
ö 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç g |
÷ |
|
||
|
w = w |
|
= |
gmax |
, L(w |
|
) = 20 lg |
|
W ( jw |
|
) |
|
= 20 lg |
è |
max ø |
. (14.6) |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||
|
|
э |
. |
|
э |
|
|
|
э |
|
|
|
|
.. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
gmax |
|
|
|
|
|
|
|
|
|
emax gmax |
|
|
. |
Если для эквивалентного |
гармонического |
|
|
сигнала |
предположить, что |
||||||||||
|
|
.. |
|
|
|
|
|
|
. |
|
|
|
||||
gmax |
= const , а gmax |
® 0 , то при уменьшении gmax в 10 раз эквивалентная |
||||||||||||||
частота уменьшится в 10 раз, а значение L(wэ) увеличится на 20 дБ, то есть контрольная точка будет смещаться влево по прямой с наклоном -20 дБ/дек. В
пределе получим режим работы системы при задающем воздействии вида
.
, и заданные значения gmax и emax будут определять тре-
буемое значение коэффициента передачи системы с астатизмом первого поряд- ка (добротность по скорости):
.
k = k v |
= |
gmax |
. |
|
|
|
|
|
|||
|
|
emax |
|
|
|
Если для эквивалентного гармонического |
сигнала предположить, что |
||||
.. |
|
|
|
. |
|
gmax |
= const , а |
gmax |
® 0 , то аналогично |
||
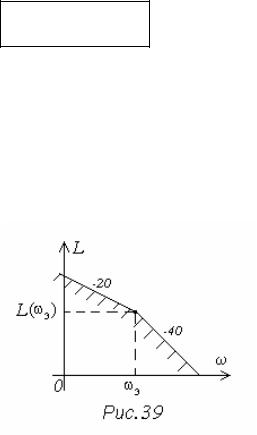
можно показать, что контрольная точка будет смещаться вправо по прямой с наклоном - 40 дБ/дек.
Область, расположенная ниже двух та- ких прямых должна рассматриваться как за- претная область для ЛАХ синтезируемой сис- темы (рис. 39). Это обеспечит заданную точ-
ность при известных максимальных значениях скорости и ускорения входного сигнала.
Полученной запретной области может соответствовать только астатическая система. Распространение полученных результатов на статические системы может быть выполнено, если принять ог- раничение не только на скорость и ускорение, но и на величину задающего воздействия gmax.
56
Подберем |
эквивалентный |
гармонический сигнал из условий: |
|
|
. |
= ωэ gэmax . |
|
gmax = gэ max , |
gmax |
Тогда при заданной допустимой ошибке |
|
εmax получим контрольную точку с координатами:
.
ω1 |
= ωэ = |
gmax |
, |
L(ω1) = 20 lg |
gmax |
. |
|
|
(14.7) |
|
|
|
|
||||||
|
. |
gmax |
|
εmax |
|
|
|
||
Если уменьшать gmax при постоянной gmax , |
контрольная точка будес |
||||||||
сдвигаться влево по |
горизонтальной |
прямой на уровне 20 lg |
gmax |
, |
а при |
||||
|
|||||||||
|
|
|
|
|
|
|
εmax |
|
|
.
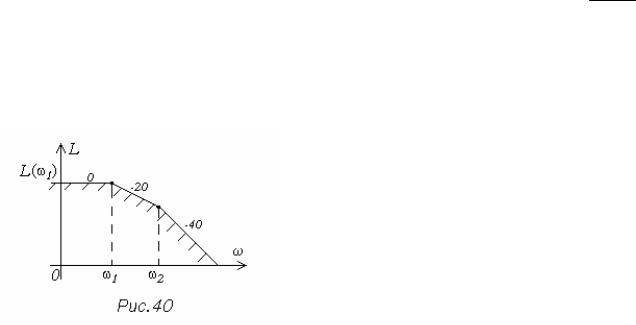
уменьшении gmax при постоянной gmax - вправо по прямой с с наклоном -20
. ..
дБ/дек, пока будет выполняться условие ωэ gmax ≤ gmax . Далее следует вос-
..
пользоваться полученными выше результатами. После частоты ω2 = g. max
gmax
получим прямую с наклоном - 40 дБ/дек. Таким образом, при условии ограни-
чения максимальной величины задающего воздействия запретная область для ЛАХ разомкнутой системы будет иметь вид, показанный на рис. 40.
Для системы компьютерного управ- ления полученные результаты также спра- ведливы, если вся запретная область оказы- вается в диапазоне частот, соответствую- щих (14.1). Запретная область для логариф-
мической псевдочастотной характеристики будет соответствовать рис. 39 или рис. 40,
если заменить частоту ω на абсолютную псевдочастоту λ.
Лекция 15. Синтез системы управления. Обеспечение запаса устойчивости системы
В качестве показателей запаса устойчивости используются: запас устой- чивости по амплитуде, запас устойчивости по фазе и показатель колебательно- сти системы. Их можно определить на основе частотных характеристик.
Запасы устойчивости по амплитуде и по фазе для замкнутой системы оп- ределяются на основе частотных характеристик разомкнутой цепи. Их получе- ние на основе логарифмических частотных характеристик показано на рис. 41.
57
Запас устойчивости по амплитуде La определяется как расстояние до го-
ризонтальной оси от ЛАХ на частоте ω1, при которой ЛФЧХ пересекает эту ось, то есть ψ(ω1)= -180 о.
Запас устойчивости по фазе μψ определяется как расстояние до горизон- тальной оси от ЛФЧХ на частоте ω2, при которой ЛАХ пересекает эту ось, то есть L(ω2)=0:
μψ = 180o + ψ(ω2 ). |
(15.1) |
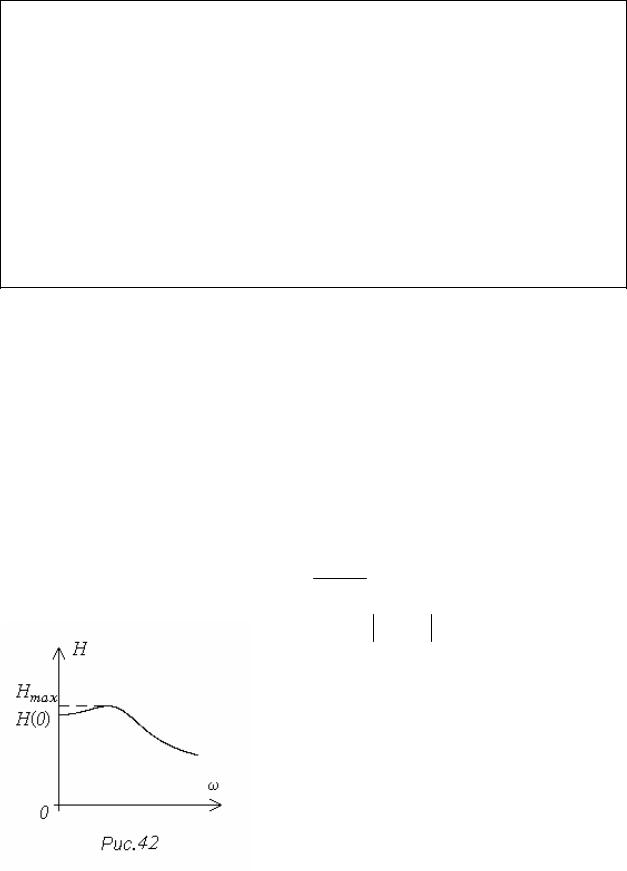
Показатель колебательности для замкнутой системы определяется по ее амплитудно-частотной характеристике (рис. 42) как отношение:
M = HHmax(0) .
где H (ω) = Ф( jω) - амплитудно-частотная
характеристика замкнутой системы, Ф(p) -
основная передаточная функция замкнутой системы. Более высокому запасу устойчивости
соответствует меньшее значение показателя колебательности.
В технических требованиях на систему чаще задается максимально допустимое зна- чение показателя колебательности. По нему на основе следующего приближенного соотно-
шения может быть определено допустимое значение запаса устойчивости по фазе:
μψ ≤ arcsin |
1 |
(15.2) |
|
M |
|||
|
|
||
|
|
58 |

или построена запретная область для амплитудно-фазовой частотной характе- ристики (рис. 43а) или ЛФЧХ (рис. 43б) разомкнутой системы.
|
На рис. 43а центр окружности |
имеет горизонтальную координату |
||||
− |
M 2 |
|
, радиус окружности R = |
M |
|
. |
M 2 − 1 |
M 2 |
|
||||
|
|
− 1 |
||||
На рис. 43б границы запретной области вдоль оси частот определяются условием:
20 lg |
M |
|
≤ L ≤ 20 lg |
M |
|
. |
|
M + 1 |
M − 1 |
||||||
|
|
|
|||||
Наиболее часто задаются следующие требования по запасу устойчивости системы:
-запас устойчивости по амплитуде не менее 10-30 дБ;
-запас устойчивости по фазе не менее 30-60о;
-показатель колебательности не более 1-1,7.
Для решения задач синтеза, то есть выбора закона управления или расче-
та корректирующего устройства наиболее удобный математический аппарат разработан применительно к логарифмическим частотным характеристикам.
При этом следует иметь в виду, что вид низкочастотной части характери-
стик выбирается с точки зрения обеспечения точностных показателей системы и должен остаться неизменным. Поэтому правила обеспечения запаса устойчи- вости разработаны для нескольких вариантов так называемых типовых ЛАХ.
Для систем с астатизмом второго порядка существенный для рассматри- ваемой задачи участок типовой ЛАХ показан на рис. 44. Ему соответствует пе-
редаточная функция
W (p) = |
k(1+ T1 p) |
, |
T1 > T2 . |
||
p2 |
(1+ T2 p) |
||||
|
|
|
|||
59

Базовая частота связана с коэффици- ентом передачи соотношением: w0 = 
 k ,
k ,
а частота среза определяется через базовую частоту: wc = w02T1 = kT1.
Для обеспечения заданного значения показателя колебательности M длина уча- стка ЛАХ с наклоном -20 дБ/дек должна составлять не менее:
h = |
ω2 |
= |
|
T1 |
= |
M + 1 |
. (15.3) |
||
|
|
|
|
|
|||||
w1 |
T2 |
M - 1 |
|||||||
|
|
|
|
||||||
Рекомендуемые значения постоянных времени определяются соотноше- ниями:
T1 |
= |
|
1 |
|
|
M |
|
, |
|
|
(15.4) |
|||
w0 |
|
|
M - 1 |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||
T2 = |
1 |
|
|
|
M (M - 1) |
|
. |
(15.5) |
||||||
|
w0 |
|
|
|
|
|
||||||||
|
|
|
|
|
M + 1 |
|
|
|
|
|||||
Соотношения (15.4) - (15.5) иногда выражают через частоту среза и ис- пользуют в виде неравенств:
T1 |
³ |
1 |
|
M |
|
, |
(15.6) |
|
wс M - 1 |
||||||||
T2 |
£ |
1 |
|
M |
|
. |
(15.7) |
|
wс M + 1 |
||||||||
|
|
|
|
|||||
При неравенствах в (15.6) - (15.7) обеспечивается дополнительный запас устойчивости, и показатель колебательности имеет меньшее значение.
Если в системе присутствуют другие инерционные звенья с меньшими постоянными времени:
W (p) = |
k(1+ T1 p) |
, |
p2 (1+ T2 p)(1+ T3 p)...(1+ Tn p) |
постоянная времени T1 должна удовлетворять соотношению (15.4), а остальные постоянные времени должны удовлетворять одному из неравенств:
n |
1 |
|
|
M (M - 1) |
|
|
||||
åTi £ |
|
|
, |
(15.8) |
||||||
w0 |
|
|
M + 1 |
|
||||||
i=2 |
|
|
|
|
|
|||||
n |
|
|
1 M |
|
|
|
||||
åTi £ |
|
. |
|
(15.9) |
||||||
|
|
|
|
|
|
|
||||
|
wс M + 1 |
|
||||||||
i=2 |
|
|
|
|
|
|||||
60