

ФИЗИКА3 БОЛЬШЕ ГОТОВОГО1 / 1-st / Механика / Лаб.раб _2
.doc
Федеральное агентство по образованию Российской Федерации
Санкт- Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
Кафедра общей и технической физики
Лаборатория механики
ЛАБОРАТОРНАЯ РАБОТА № 2
«ЭКВИВАЛЕНТНОСТЬ ГРАВИТАЦИОННОЙ И ИНЕРТНОЙ МАСС»
Выполнил: студент ЭР-06-2
Загороднев К.Ю.
Проверил:
Сырков А.Г.
САНКТ-ПЕТЕРБУРГ,
2006г.
Цель работы - изучение законов равноускоренного движения, динамики поступательного движения связанных тел; определение ускорения свободного падения тел различной массы.
Общие сведения
Масса – одна из основных характеристик материи, являющаяся мерой ее инертных и гравитационных свойств. Инертная масса характеризует инертные свойства тел; она входит во второй закон динамики. Гравитационная масса характеризует силу, с которой тела притягиваются друг к другу, она фигурирует в законе всемирного тяготения. Ответ на вопрос, нужно ли различать инертную и гравитационную массу, может дать только опыт.
Покажем, что инертная и гравитационная массы пропорциональны друг другу. Сила тяготения, действующая на тело с гравитационной массой mг,
![]() ,
,
где G - гравитационная постоянная, зависящая от системы единиц; Mг - гравитационная масса Земли; R - расстояние между материальными точками mг и Mг.
C другой стороны, согласно второму закону динамики, эта сила
![]()
где
![]() -
инертная масса;
-
инертная масса;
![]() -
ускорение свободного падения.
-
ускорение свободного падения.
Соответственно
 ,
,
где А = GMг/R2 = const.
Экспериментально
установлено, что ускорение свободного
падения одинаково для всех тел. Из этого
следует, что mг
и mи
пропорциональны
друг другу. А соответствующим выбором
G
можно отношение
![]() /
/![]() привести
к единице.
привести
к единице.
Равенство инертной и гравитационной масс, экспериментально подтвержденное с относительной погрешностью 10-12, лежит в основе принципа эквивалентности гравитационных сил и сил инерции. Простейший опыт по проверке сказанного заключается в установлении равенства ускорения свободного падения для всех тел.
И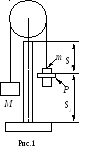 змерение
ускорения свободного падения тел
различной массы проводится на приборе
Атвуда. Через ролик, монтированный на
подшипнике таким образом, чтобы он мог
вращаться с возможно малым сопротивлением,
проходит нитка с двумя одинаковыми
грузами массой М каждый (рис.1). Система
находится в равновесии.
змерение
ускорения свободного падения тел
различной массы проводится на приборе
Атвуда. Через ролик, монтированный на
подшипнике таким образом, чтобы он мог
вращаться с возможно малым сопротивлением,
проходит нитка с двумя одинаковыми
грузами массой М каждый (рис.1). Система
находится в равновесии.
Если по одну сторону блока прибавить небольшой грузик m, то система, состоящая из больших грузов М и малого m, получит ускорение, с которым пройдет путь S1. На кольце Р дополнительный груз будет отцеплен и далее грузики пройдут путь S2 с постоянной скоростью.
При предположении, что сила трения в системе и масса ролика и нити пренебрежимо малы, а нить нерастяжима, можно показать, что ускорение на участке S1
![]() .
(1)
.
(1)
С другой стороны, при равенстве нулю начальной скорости можно записать
![]() ,
(2)
,
(2)
где - скорость в конце движения на участке S1. Приравняв формулы (1) и (2), получим
![]() .
.
Так как = S2/t, где t - время движения с постоянной скоростью на участке S2, то окончательно
 .
(3)
.
(3)
Следовательно, для определения g необходимо измерить время движения с постоянной скоростью на участке S2 известных масс М и m при фиксированных S1 и S2.
Порядок выполнения работы
О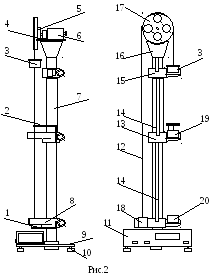 бщий
вид прибора Атвуда показан на рис.2. На
вертикальной колонке 7, закрепленной
на основании 9, находятся три кронштейна:
неподвижный нижний кронштейн 8
и
два
подвижных:
средний 13 и верхний 15, а также верхняя
втулка 16. Основание оснащено регулируемыми
ножками 10 для выравнивания положения
прибора.
бщий
вид прибора Атвуда показан на рис.2. На
вертикальной колонке 7, закрепленной
на основании 9, находятся три кронштейна:
неподвижный нижний кронштейн 8
и
два
подвижных:
средний 13 и верхний 15, а также верхняя
втулка 16. Основание оснащено регулируемыми
ножками 10 для выравнивания положения
прибора.
На верхней втулке при помощи верхнего диска 4 закреплен узел подшипника ролика 5, ролик 17 и электромагнит 6. Через ролик проходит нить 12 с привязанными к ее концам грузиками 3 и 18.
Электромагнит после подведения к нему питающего напряжения при помощи фрикционной муфты удерживает систему ролика с грузиками в состоянии покоя.
Верхний и средний кронштейны можно перемещать вдоль колонки и фиксировать в любом положении, устанавливая, таким образом, длину пути равномерно-ускоренного (S1) и равномерного (S2) движений. Для облегчения измерения S1 и S2 на колонке имеется миллиметровая шкала (14), все кронштейны имеют указатель положения, а верхний кронштейн - дополнительную черту, облегчающую точное согласование нижней грани большего грузика с точкой начала движения.
На среднем кронштейне закреплен кронштейн 2 и фотоэлектрический датчик 19. Кронштейн 2 снимает с падающего вниз большого грузика дополнительный грузик, а фотоэлектрический датчик в это время создаёт электрический импульс, сигнализирующий о начале равномерного движения системы грузиков. Оптическая ось фотоэлектрического датчика (черта на его корпусе) находится на уровне указателя положения среднего кронштейна.
Нижний кронштейн оснащен двумя кронштейнами 1 с резиновыми амортизаторами, в которые ударяют завершающие свое движение грузики. На этом кронштейне закреплен также фотоэлектрический датчик 20 с оптической осью на уровне указателя положения кронштейна. После пересечения этого уровня нижней гранью падающего груза образуется электрический сигнал о прохождении грузиками определенного пути.
В основании прибора находится блок 11, включающий миллисекундомер, к которому подключены фотоэлектрические датчики, а также подводится напряжение, питающее обмотку электромагнита.
Основные расчетные формулы:
![]() ;
;
 .
M=60
г.
.
M=60
г.
Формулы погрешности:
![]() ;
;
где
![]() = m = 0,01 г;
= m = 0,01 г;
![]() =
=
![]() = 1 мм.
= 1 мм.
|
Номер опыта |
m (г) |
S1 (см) |
S2 (см) |
ti (с) |
|
g (м/с2) |
|
|
1 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.584 0.494 0.420 0.376 0.0350 |
0,553 0,458 0,434 0,387 0,316 |
10.21 9.64 9.85 9.93 9.96 |
0.1648 0.1532 0.1021 0.1412 0.1003 |
|
2 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.582 0.462 0.417 0.374 0.348 |
10.11 9.71 9.85 9.95 9.92 |
0.1521 0.1214 0.0023 0.1014 0.0952 |
|
|
3 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.556 0.462 0.415 0.378 0.341 |
10.32 9.73 9.84 9.88 9.90 |
0.0841 0.0547 0.0651 0.1002 0.0951 |
|
|
4 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.575 0.470 0.408 0.381 0.363 |
9.98 9.83 9.76 9.84 9.94 |
0.0954 0.1312 0.1541 0.0321 0.0587 |
|
|
5 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.569 0.470 0.410 0.362 0.357 |
10.16 9.88 9.94 9.78 9.95 |
0.0845 0.0869 0.0957 0.1007 0.1211 |
|
|
6 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.555 0.468 0.410 0.404 0.365 |
9.97 9.86 9.74 9.69 9.84 |
0.1012 0.0974 0.1003 0.0982 0.0821 |
|
|
7 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.561 0.459 0.409 0.383 0.345 |
10.08 9.76 9.87 9.88 9.92 |
0.1005 0.1018 0.1230 0.1054 0.1562 |
|
|
8 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.558 0.461 0.411 0.375 0.349 |
10.12 9.70 9.84 9.81 9.95 |
0.1432 0.1025 0.1421 0.1153 0.0632 |
|
|
9 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.552 0.472 0.413 0.380 0.350 |
9.87 9.69 9.71 9.83 9.79 |
0.1042 0.1187 0.0954 0.1645 0.1236 |
|
|
10 |
5.86 7.80 9.57 11.10 12.90 |
20 |
26 |
0.580 0.478 0.414 0.378 0.349 |
10.05 9.86 9.74 9.81 9.79 |
0.0948 0.0912 0.0862 0.0941 0.1165 |
Пример расчетов:
![]()
Окончательный ответ:
![]()
Вывод: В данной лабораторной работе была определена эквивалентность гравитационной и инертной масс. Полученное значение имеет небольшое расхождение с табличным значением, что говорит об отсутствии грубых ошибок при измерении и вычислении. Следовательно, данный метод подходит для вычисления ускорения свободного падения с довольно большой точностью.