

ФИЗИКА3 БОЛЬШЕ ГОТОВОГО1 / 1-st / Механика / 15 / мя 15
.docЦель работы – экспериментально исследовать основные свойства гироскопа, изучить законы вращательного движения твёрдого тела.
Краткое теоретическое обоснование
Гироскопом называется быстровращающееся твердое тело, ось которого может изменять свое направление в пространстве. Гироскоп, когда на него действуют внешние силы, может совершать удивительные движения, кажущиеся на первый взгляд неожиданными и непонятными. Вращение симметричного тела происходит с большой угловой скоростью ω вокруг оси симметрии гироскопа, которая называется осью гироскопа. Обычно одна из точек оси гироскопа бывает закреплена. Ее называют точкой опоры. В общем случае движение гироскопа слагается из движения точки опоры и движения вокруг мгновенной оси, проходящей через эту точку.
Примером гироскопа с движущейся точкой опоры может служить детская игрушка - волчок. Мы будет рассматривать наиболее простой случай - гироскоп с неподвижной точкой опоры.
Схема установки
Где: m -масса
гироскопа;
-масса
гироскопа;
m0 -масса противовеса;
J-момент инерции гироскопа;
-угловая скорость прецессии гироскопа;
t -время поворота гироскопа;
-угол поворота гироскопа;
w –угловая скорость вращения гироскопа;
L –момент импульса
D–диск;
OO’–горизонтальная ось;
К–противовес;
Расчетные формулы
- угловая скорость прецессии гироскопа, рад/с
- момент
инерции гироскопа, кг![]() F1=mg
F1=mg
Формулы для расчёта погрешности
![]() - ошибка
измерений по разбросу результатов,
рад/с
- ошибка
измерений по разбросу результатов,
рад/с
![]() - максимальная
ошибка результата, кг
- максимальная
ошибка результата, кг![]()
Таблица измерений
|
Физ. величина |
ω1 |
Δω |
α |
Δα |
t1 |
Δt |
1 |
Δ1 |
Δ J1 |
J1 |
|
Ед. измерения
Номер опыта |
мин-1 |
мин-1 |
град |
град |
с |
с∙10-3 |
рад/с |
рад/с |
кг∙м2 |
кг∙м2 |
|
1 |
1000 |
50 |
60 |
10 |
4,087 |
1 |
0,243 |
0,04 |
6,8∙10-4 |
1,7∙10-3 |
|
2 |
4,296 |
|||||||||
|
3 |
4,512 |
|||||||||
|
4 |
4,243 |
|||||||||
|
5 |
4,393 |
|||||||||
|
|
ω2 |
|
|
|
t2 |
|
2 |
Δ2 |
Δ J1 |
|
|
6 |
2000 |
50 |
60 |
10 |
7,983 |
1 |
0,136 |
0,015 |
6,7∙10-4 |
1,5∙10-3 |
|
7 |
8,051 |
|||||||||
|
8 |
8,109 |
|||||||||
|
9 |
8,055 |
|||||||||
|
10 |
8,473 |
|||||||||
|
|
ω3 |
|
|
|
t3 |
|
3 |
Δ3 |
Δ J3 |
|
|
11 |
3000 |
50 |
60 |
10 |
12,074 |
1 |
0,115 |
0,01 |
6,5∙10-4 |
2∙10-3 |
|
12 |
11,956 |
|||||||||
|
13 |
12,014 |
|||||||||
|
14 |
11,521 |
|||||||||
|
15 |
11,717 |
|||||||||
|
|
ω4 |
|
|
|
t4 |
|
4 |
Δ4 |
Δ J4 |
|
|
16 |
4000 |
50 |
60 |
10 |
14,898 |
1 |
0,078 |
0,008 |
6,6∙10-4 |
1,4∙10-3 |
|
17 |
15,725 |
|||||||||
|
18 |
14,926 |
|||||||||
|
19 |
14,735 |
|||||||||
|
20 |
15,982 |
Расчет результатов эксперимента.
m1=0.1 кг
l=0.17 м
Δ l=5·10-4 м
Δ m=10-3 кг
F1=0.19.8=0.98 H

![]()
Расчет погрешностей эксперимента.
![]()
 кгм2
кгм2
![]()
График зависимости Ω(ω)
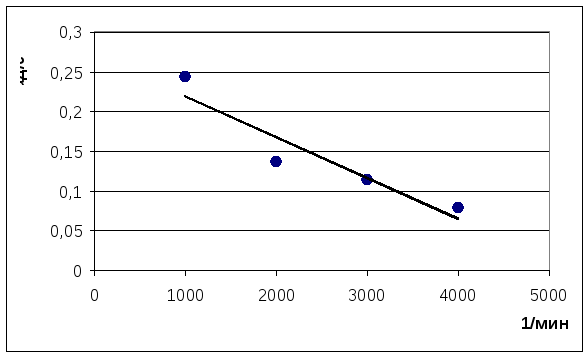

ω,мин-1
Из графика видно, что угловая скорость прецессии гироскопа обратно пропорциональна его угловой скорости вращения т.е. чем медленней вращается тяжелый гироскоп тем быстрее он прецессирует и наоборот.
Окончательные результаты
J=(6,6![]() 0,165)10-4
кгм2
0,165)10-4
кгм2
Вывод:
В результате выполнения лабораторной работы ознакомился с устройством гироскопа, исследовал зависимость угловой скорости от угловой скорости вращения гироскопа: угловая скорость прецессии гироскопа обратно пропорциональна его угловой скорости вращения.
В работе выяснилось, что основным
свойством гироскопа является способность
сохранять неизменное направление оси
вращения, если на него не действует
момент внешних сил. Движение такого
типа описывается следующим уравнением
![]() .
.