-
Теория автоматического управления
Вечерники:
Осенний семестр
Лекции –30 час., практические – 8 час., лаб. раб –12 час., экзамен.
Весенний семестр
Лекции 32 час., практические – 8 час., лаб. раб. –12 час., курсовой проект, защита, экзамен.
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЛИТЕРАТУРА
1.Солодовников В.В. Основы теории и элементы систем автоматического регулирования. М. Машиностроение ,1985
2.Под редакцией Солодовникова В.В. Техническая кибернетика. Теория автоматического регулирования. Книга 1,2. М. Машиностроение, 1967
3.Воронов А.А. Основы теории автоматического регулирования. М., В.Ш. , 1977
4.Бесекерский В.А. , Попов Е.П. Теория систем автоматического регулирования. М.,Наука,1975
5.Ройтенберг Я.Н. Автоматическое управление. М., Наука, 1978
6. Востриков А.С., Французова Г.А. Теория автоматического регулирования. - М: Высшая школа, 2004.
7.Анкимюк
В.Л., Опейко О.Ф., Михеев Н.Н.. Теория
автоматического управления.. – М: Дизайн
ПРО,2002.
Литература.
Основная литература.
Бесекерский В.А., Попопв Е.П. Теория систем автоматического управления. – СПб.:Профессия,2003.
Подчукаев В.А. Теория автоматического управления. – М.:Физматлит,2005.
Ерофеев А.А. Теория автоматического управления – СПб.:Политехника,2005.
Гальперин М.В. Автоматическое управление-М.: ИД «Форум»-ИНФРАМ, 2007.
Душин С.Е., Зотов Н.С., Имаев Д.Х., Кузьмин Н.Н., Яковлев Б.В. Теория автоматического управления – М.: Высшая школа, 2005.
Востриков А.С., Французова Г.А. Теория автоматического регулирования – М.:Высшая школа,2004.
Ким Д.П. Теория автоматического управления, т.1,т.2.-М.:Физматлит,2004.
Анкимюк В.Л., Опейко О.Ф., Михеев Н.М. Теория автоматического управления. – М.:Дизайн ПРО,2002.
Дополнительная литература.
1. Савин М.Н.,Елсупов ВюСю, Пятина Е.Н. Теория автоматического управления – Ростов-на-Дону: Феникс,2007
2 Дорф.Р., Бишоп Р. Современные системы управления. – М.: Лаборатория базовых знаний,2004.
Под редакцией Пупкова К.А. Методы классической и современной теории автоматического управления. – М.:, МГТУ,2000.
Филипс Ч.,Харбор Р. Системы управления с обратной связью. М.: Лаборатория базовых знаний,2001.
Теория автоматического управления – прикладная наука, которая изучает принципы и методы построения автоматических систем, то есть систем, которые выполняют поставленные перед ними цели без участия человека
Если в контуре управления принимает участи человек, то такие системы называют автоматизированными системами.
ТАУ изучает управление определенными конкретными объектами управления.
Управление - организация определенного процесса, которая обеспечивает достижение определенной цели путем принятия соответствующих решений при выполнении определенных правил, алгоритмов, программ. Другими словами управление – процесс воздействия на объект управления с целью изменения его поведения в нужном направлении
Рассмотрим простейший пример. Предположим, что нам надо поддерживать постоянное давление в некотором объеме, добавляя в него газ для увеличения давления, и выпуская газ - для уменьшения давления.
Как организовать процесс управления в этом случае?
Цель управления – поддержание постоянного давления. Мы определим какое давление необходимо поддерживать (соберем информацию и будем ее хранить), измерим давление в объеме (также соберем информацию), сравним истинное давление с требуемым ( переработаем информацию) и в зависимости от знака рассогласования ( давление больше заданного или меньше ) добавим газ или стравим его ( примем решение и выполним его).
Принимая решения, система выполняет определенные правила, алгоритмы, программы.
Объектом управления называется любое устройство, технологический процесс, производство, отрасль народного хозяйства и т.п., для которых ставится определенная задача ( цель ) управления, выражающаяся в заданном изменении множества фазовых координат или выходных величин Y={ Y1(t), Y2(t),….Yk(t) }, характеризующих изменение характеристик и свойств рассматриваемого объекта.
В общем виде структурная схема объекта управления имеет вид:
F1(t) …. Fn(t)


U1(t)
U2(t)
Um(t)
Y1(t) Y2(t)
Yk(t)


Х1 ….. Хn





Здесь–
![]() -
векторы соответственно управляющих
воздействий, выходных параметров,
возмущающих воздействий.
-
векторы соответственно управляющих
воздействий, выходных параметров,
возмущающих воздействий.
![]() -
переменные состояния, внутренние и
часто недоступные измерению переменные,
которые определяют состояние объекта
в каждый момент времени, причем
-
переменные состояния, внутренние и
часто недоступные измерению переменные,
которые определяют состояние объекта
в каждый момент времени, причем
![]()
Следует отметить , что все процессы управления происходят во времени (t), причем t – вещественная независимая переменная.
При изменении управляющих и возмущающих воздействий объект управления переходит из одного состояния в другое, причем множество состояний объекта управления дают необходимую информацию о характеристиках, условиях работы и свойствах рассматриваемого объекта.
Если у объекта много выходных величин (фазовых координат), то такой объект называется многомерным. Если из множества фазовых координат ( выходных величин) в качестве регулируемой величины выбирается одна величина, то такой объект называется одномерным.
Структурная
схема одномерного объекта управления
имеет вид:
F(t)
U(t)
Y(t) ОБЪЕКТ
УПРАВЛЕНИЯ


Многомерный объект управления может быть по структурной схеме приведен к одномерному, если множество регулируемых величин, управляющих и возмущающих воздействий представить в векторной форме.

![]()
![]()
ОБЪЕКТ
УПРАВЛЕ НИЯ
![]()
![]()


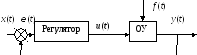
Для управления объектом создается система автоматического управления.
САУназывается динамическая система, стремящаяся сохранить в допустимых пределах ошибки между требуемыми и действительными значениями регулируемых переменных при помощи их сравнения и использования полученных при этом сигналов для управления источниками энергии.
Поясним это определение.
САУ – динамическая системам, т. к процессы, происходящие в ней, изменяются во времени. При построении САУ используется принцип Ползунова, заключающийся в том, что действительное значение регулируемой величины сравнивается с её заданным (желаемым) значением. Полученный при этом сигнал используется для управления источниками энергии: в приведенном выше примере поддержания постоянного давления в резервуаре - для включения одного из клапанов.
Функциональную схему САУ в обобщенном виде можно представить :