

1. Динамический синтез рычажного механизма.
Цели и задачи первого листа
При выполнении первого листа решаются 2 задачи:
а) метрический синтез, т.е. определяется недостающих размеров звеньев рычажного механизма.
б) уменьшение периодических колебаний угловой скорости рычажного механизма.
Проектирование механизмов представляет собой сложную комплексную проблему, решение которой можно разбить на три самостоятельных этапа:
1. установление кинематической схемы механизма, которая обеспечивает требуемый вид и закон движения;
2. разработка конструктивных форм механизма обеспечивающая прочность, долговечность, высокий КПД;
3. определение механико-экономических и технических показателей данного механизма. В ТММ рассматривается первый этап с учетом 2го и 3го этапа.
При метрическом синтезе за основное условие в данном механизме принимаем скорость входного звена. В качестве дополнительных условий используем условие существования кривошипа, ограничение углов давления, коэффициента изменения средней скорости. В обязательном порядке должны выполнятся дополнительные условия, а основное условие может отличатся на небольшую величину (до 2%).
В период установившегося движения в реальной машине ц1 не остается постоянным, а колеблется относительно некоторого среднего значения. При решении второй задачи за основное условие используется коэффициент неравномерности хода машины (формула 1.1.1).
 Error: Reference source not found
Error: Reference source not found
1.1.1

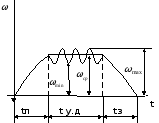
Рис 1.1 Диаграмма колебания угловой скорости в период установившегося движения.
1.1.2

Коэффициент д характеризует только перепад угловой скорости входного звена, но не характеризует динамики движения этого звена внутри этого цикла.
Сравнительной оценкой динамических свойств машины в период установившегося движения является коэффициент динамичности (формула 1.1.2).
1.2 Структурный анализ рычажного механизма
Звено- одно тело или несколько тел жестко соединенных между собой.
Кинематическая пара- соединение двух звеньев допускающее их относительное движение.
Кинематической цепью – связанная система звеньев, образующих между собой кинематическую пару.
Механизмом- называется такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определяемые движения.
Кинематическая цепь, которая будучи подсоединенная к стойке имеет степень свободы 0 – называется структурной группой. Класс структурной группы определяется по числу внутренних кинематических пар в замкнутом контуре входящим в состав группы. Порядок структурной группы определяется по числу внешних кинематический пар в составе группы.
 Error: Reference source not found
Error: Reference source not found
W=3n-2p5-p4 1.2.1
W=6n-5p5-4p4-3p3-2p2-p1 1.2.2
B
A
O1
O2
E
C
D
Степень свободы механизма равняется 1, значит, есть только один механизм первого класса и одно входное звено. Чтобы построить правильно заменяющую схему необходимо пользоваться правилами построения заменяющей схемы:
Ползуны, кулисные камни, звенья другой конфигурации заменяем рычагами.
Поступательные пары заменяются вращательными.
Звенья которые соединяются с 3мя другими звеньями изображается в виде треугольника, с 4-мя в виде четырехугольника.
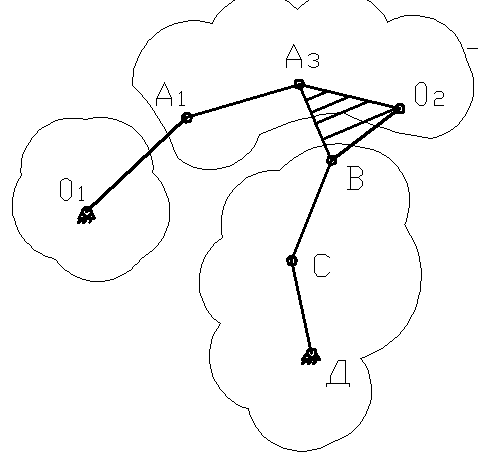
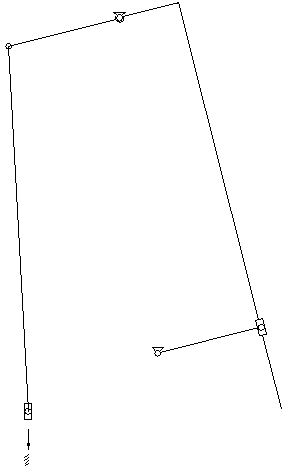
Рис 2.3 - Заменяющая схема рычажного механизма с указанием на структурные группы
Чтобы
разделить механизм на структурные
группы надо: Рис
2.2 - Заменяющая схема рычажного механизма.
отделить механизм первого класса.
Оставшуюся часть делить на наиболее простые структурные группы.
С
 I(0,1)→II2(2,3)→II2(4,5)→II2
Значит
данный механизм второго класса и второго
порядка
I(0,1)→II2(2,3)→II2(4,5)→II2
Значит
данный механизм второго класса и второго
порядка
Кинематическая схема рычажного механизма
Кинематическая схема механизма строится в выбранном масштабе с точным соблюдением всех размеров и форм, при изменении которых изменяются положения, скорости и ускорения точек механизма. На кинематической схеме должно быть указано все, что необходимо для изучения движения.