

3327-p
.pdf3327 |
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ |
|
|
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА |
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Кафедра «Путь и строительство железных дорог»
ПРИМЕНЕНИЕ ПРОГРАММНЫХ КОМПЛЕКСОВ
Методические указания к выполнению лабораторных работ для студентов специальности 271501.65 «Строительство железных дорог,
мостов и транспортных тоннелей» очной и заочной форм обучения
Составители: А.В. Тарасов А.В. Илюшин М.Р. Сулейманов
Самара
2013
1
УДК 625.03
Применение программных комплексов : методические указания к выполнению лабораторных работ для студентов специальности 271501.65 «Строительство железных дорог, мостов и транспортных тоннелей» очной и заочной форм обучения / составители : А.В. Тарасов, А.В. Илюшин, М.Р. Сулейманов. – Самара : СамГУПС, 2013. – 58 с.
Приведены методические указания для выполнения лабораторных работ.
В методических указаниях представлен материал для подготовки к выполнению лабораторных работ, индивидуальные задания для самостоятельной работы по дисциплинам «Основы научных исследований с элементами САПР» и «Програмное обеспечение расчетов конструкции железнодорожного пути».
Утверждены на заседании кафедры ПСЖД 10 октября 2013г., протокол № 2 Печатаются по решению редакционно-издательского совета университета.
Составители: Андрей Викторович Тарасов Александр Васильевич Илюшин Марсель Рафикович Сулейманов
Рецензенты: к.т.н., доцент СамГУПС С. А. Галанский; к.т.н., доцент СамГУПС В.А. Краснов
Подписано в печать 19.12.2013. Формат 60х90 1/16. Усл. печ. л. 3,63. Тираж 100 экз. Заказ 236.
© Самарский государственный университет путей сообщения, 2013
2
Введение
Наука – это не только совокупность накопленных знаний, но и деятельность, направленная на получение новых, ранее не существовавших знаний. Основой науки как процесса является научно-исследовательская деятельность. При этом целью любого научного исследования является всестороннее, достоверное изучение объекта, процесса или явления, а также получение и внедрение в практику результатов исследований.
Одним из важнейших требований, предъявляемых к научному исследованию, является научное обобщение, которое позволит установить зависимость и связь между изучаемыми явлениями и процессами и сделать научные выводы. Чем глубже выводы, тем выше научный уровень исследования. Результаты научных исследований оцениваются тем выше, чем выше научность сделанных выводов и обобщений, чем достовернее они и эффективнее. Они должны создавать основу для новых научных разработок.
Производственные экспериментальные исследования имеют целью изучить процесс в реальных условиях с учетом воздействия различных случайных факторов производственной среды, в то время как метод моделирования – изучение явлений с помощью моделей – один из основных в современных исследованиях.
При построении модели свойства и сам объект обычно упрощают, обобщают. Чем ближе модель к оригиналу, тем удачнее она описывает объект, тем эффективнее теоретическое исследование и тем ближе полученные результаты к принятой гипотезе исследования. Стандартных рекомендаций по выбору и построению моделей не существует. Модель должна отображать существенные явления процесса. Мелкие факторы, излишняя детализация, второстепенные явления и т. п. лишь усложняют модель, затрудняют теоретические исследования, делают их громоздкими, нецеленаправленными. Поэтому модель должна быть оптимальной по своей сложности, желательно наглядной, но главное – достаточно адекватной, т. е. описывать закономерности изучаемого явления с требуемой точностью. Для построения наилучшей модели необходимо иметь глубокие и всесторонние знания не только по теме и смежным наукам, но и хорошо знать практические аспекты исследуемой задачи.
Возможность получения результатов, используя программное обеспечение с последующей обработкой, анализом и прогнозированием позволяет проводить научные исследования без проведения ряда экспериментов. Модульная система программных продуктов позволяет решать широкий круг задач, в частности, задачи железнодорожного транспорта.
Освоение курса дисциплины позволит в более широкой форме применять ЭВМ в научных исследованиях, ставить и решать задачи моделирования, обрабатывать результаты эксперимента, проводить вероятностно-статический анализ, оценивать адекватность теоретических решений в решении проблем путевого хозяйства, оформлять результаты научной работы.
3
Лабораторная работа № 1
ОЗНАКОМЛЕНИЕ С ПРОГРАММНЫМ КОМПЛЕКСОМ «УНИВЕРСАЛЬНЫЙ МЕХАНИЗМ». СОЗДАНИЕ МОДЕЛИ МАЯТНИКА
Исходные данные для выполнения лабораторной работы указаны в табл. 1 Приложения.
Цель работы:
–построить модель однозвенного маятника. Выполнить моделирование и получить график колебаний маятника по точке 1 с последующим экспортом графика в активную книгу Excel. Определить период колебаний по полученному графику;
–изменить начальные условия положения маятника. Выполнить моделирование и получить график колебаний маятника по точке 1 с последующим экспортом графика в активную книгу Excel. Определить период колебаний по полученному графику.
Моделирование механических систем
Рассмотрим физический маятник, то есть абсолютно твердое тело, имеющее горизонтальную ось вращения, не проходящую через центр тяжести. Это – один из простых примеров механической системы.
Для математического описания движения системы с каждым телом связывается прямоугольная декартова система координат (СК), начало которой помещается в любую точку тела, а оси жестко связаны с телом. Таким образом, тело является неподвижным относительно этой СК, и координаты всех его точек постоянны. Ориентация осей по отношению к телу может быть выбрана произвольным образом, но уравнения движения будут несколько более компактными, если оси являются главными осями инерции. В дальнейшем системы со связанными системами координат – СК и обозначением СК [номер тела], например, СК1 – СК, связанная с телом номер 1. В частном случае, когда тело имеет оси симметрии, оси связанной СК удобно (но не обязательно) направить по осям симметрии.
Ход работы
Для получения более подробной информации по созданию модели воспользуйтесь руководством пользователя, расположенном Помощь/Руководство пользователя/
Начинаем работать в UM.
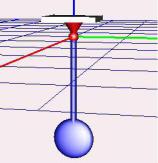
На рис. 1 представлена модель маятника, которую необходимо построить, используя параметры, взятые из таблицы вариантов.
Рис. 1. Модель маятника
4

Для создания модели маятника запустите модуль UMInput. Выберите пункт меню Файл/Новый объект.
Появится окно конструктора для описания новой модели, см. рис. 2.
Рис. 2. Окно конструктора
Начинать описание любой механической системы следует с создания набора Графических объектов (ГО) – образов элементов конструкции (тел, силовых элементов, окружающей среды).
Создание нового графического объекта – образа сцены
Сценой назовем рисунок, соответствующий неподвижным элементам объекта. Для сцены (создание которой вообще-то не обязательно) создается отдельный ГО. В случае маятника сцене будет принадлежать изображение неподвижного шарнира (стойки), к которому прикрепляется маятник. Для создания соответствующего образа выполните следующие действия.
Перейдите на ветку Графические объекты в списке элементов модели.
Для добавления нового графического объекта щелкните на кнопке в верхней части инспектора, см. рис. 3.
Рис. 3. Добавление нового элемента
По умолчанию, вновь созданному графическому объекту присваивается стандартное имя GO1. Переименуем графический объект в Стойка.
5
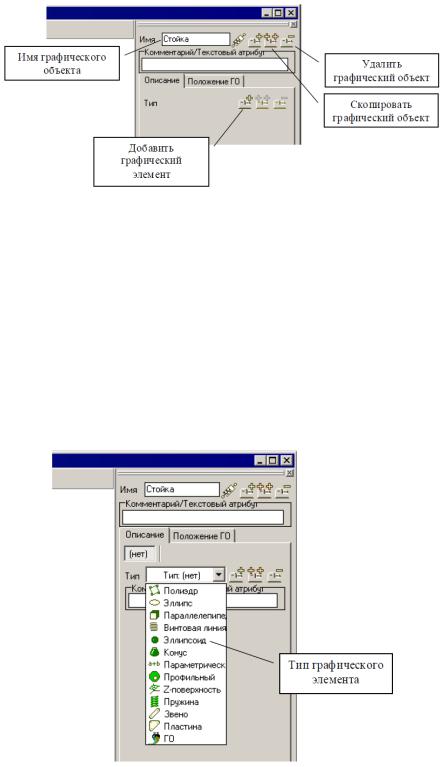
Перейдите в поле имени графического объекта и введите Стойка и нажмите Enter, см. рис. 4.
Рис. 4. Переименование графического объекта
Каждый графический объект может состоять из произвольного числа графических элементов (примитивов, ГЭ), что позволяет создавать весьма сложные образы. В нашем случае создадим три элемента – шар, конус и параллелепипед, которые вместе и образуют образ стойки.
Создание нового графического элемента: шар
Нажмите кнопку Добавить графический элемент, см. рис. 4.
Образовалась новая закладка GE1, см. рис. 5.
Рис. 5. Тип графического элемента
Выберите тип нового графического элемента – Эллипсоид.
На закладке Параметры задайте полуоси эллипсоида a=b=c=0.05.
Перейдите на закладку Цвета и выберите красный цвет в качестве диффузного.
Создание нового графического элемента: конус
Добавьте новый графический элемент и выберите его тип – Конус.
6
Замечание. Не путайте создание нового графического объекта и создание новых графических элементов (примитивов) в рамках одного графического объекта. В данном примере мы создаем один графический объект – Стойка, который будет включать три графических элемента: шар, конус и параллелепипед.
На закладке Параметры установите R2 = 0.1; R1 = 0; h = 0.15.
Перейдите на закладку Цвета и выберите красный цвет в качестве диффузного.
Создание нового графического элемента: параллелепипед
Добавьте новый графический элемент и выберите его тип – Параллелепипед. На закладке Параметры установите A = 0.5; B = 0.5; C = 0.05.
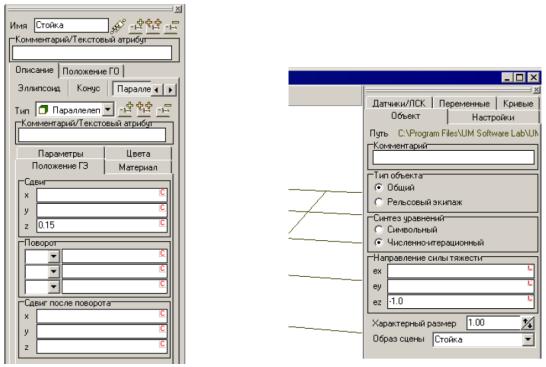
Перейдите на закладку Положение ГЭ. В поле Z, группы Сдвиг установите 0.15, см. рис. 6.
Рис. 6. Положение графического элемента |
Рис. 7. Выбор образа сцены |
Назначение графического объекта образу сцены
Перейдите на ветку Объект в списке элементов модели. В поле Образ сцены выберите Стойка, см. рис. 7.
Образ маятника
Вернитесь на ветку Графические объекты в списке элементов модели. Создайте новый графический объект.
Переименуйте второй графический объект в Маятник.
Замечание. Обратите внимание, что после ввода любых данных следует нажимать клавишу Enter, чтобы введенная информация тут же обрабатывалась программой.
Образ маятника будем изображать двумя графическими элементами: эллипсоидом и конусом.
Добавьте новый графический элемент Эллипсоид с параметрами a; b; c (из исходных данных). Выберите синий цвет в качестве диффузного.
7
Добавьте новый графический элемент Конус с параметрами R2; R1; h (из исходных данных). Выберите синий цвет в качестве диффузного.
Графический образ маятника создан.
Создание тел
Маятник как механическая система образован единственным телом. Для его описания выберите ветку Тела в списке элементов модели. Создайте новое тело (так же как новый графический объект).
Переименуйте новое тело в Маятник.
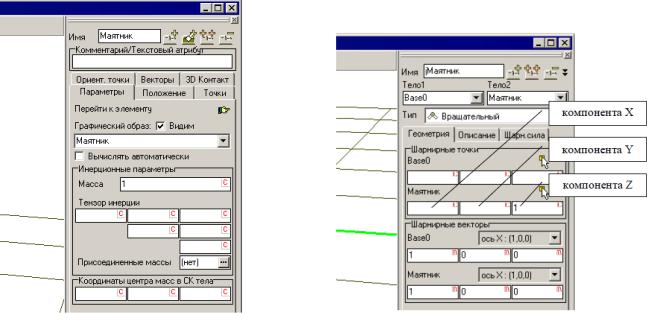
Выберите графический образ Маятник из списка доступных графических образов. В поле Масса введите значение массы маятника из исходных данных, см. рис. 8.
Рис. 8. Параметры маятника |
Рис. 9. Ввод данных шарнирных точек |
Создание шарниров
Маятник и стойку связывает вращательный шарнир. Для его создания выполните следующие операции.
Вдереве элементов модели выберите Тела/Маятник.
Винспекторе нажмите кнопку Перейти к элементу .
.
Впоявившемся списке выбрать раскрывающийся пункт меню Создать шарнир, затем выберите Вращательный.
После этого автоматически будет создан вращательный шарнир с именем jМаятник, связывающий базу (Base0, СК0) и маятник. Шарнирные точки и шарнирные векторы определяют положение оси вращения относительно каждого тела.
Вполе Шарнирные точки/Маятник задайте компоненте Z значение h (длина маятника из задания), см. рис. 9.
Таким образом, мы заставим маятник вращаться вокруг своей верхней точки.
8
Сохранение введенных данных
После того как мы описали тело и шарнир, модель маятника описана полностью. Самое время сохранить все введенные данные. По умолчанию модель называлась UmObj0, введите для модели новое имя.
Выберите пункт меню Файл/Сохранить как… В поле полный путь введите Путь к модели\Имя объекта.
Подготовка к моделированию: синтез уравнений движения
Программный комплекс «Универсальный механизм» состоит из двух независимых программ: программы описания моделей (UM Input) и программы моделирования движения (UM Simulation). Прежде чем перейти к моделированию динамики маятника, следует рассмотреть проблему синтеза уравнений движения. «Универсальный механизм» поддерживает два способа синтеза уравнений движения: символьный и численноитерационный. Рассмотрим их более подробно.
Символьный синтез уравнений движения
Символьный синтез уравнений движения предполагает вывод уравнений на одном из поддерживаемых языков программирования (поддерживаются C и Pascal). Далее эти синтезированные файлы будут откомпилированы некоторым заданным внешним компилятором (устанавливается отдельно от программы), что на выходе даст динамически загружаемую библиотеку UMTask.dll, которая будет подключаться к программе моделирования движения.
Синтез исходных текстов и запуск внешнего компилятора выполняется из программы описания моделей.
Численно-итерационный синтез уравнений движения
Численно-итерационный метод предполагает вывод уравнений движения численно на каждом шаге численного метода интегрирования уравнений движения непосредственно в программе моделирования движения.
В списке элементов модели в левой верхней части окна конструктора объектов выберите Объект. В Инспекторе моделирования в поле Синтез уравнений выберите Численно-итерационный.
Сохраните модель еще раз для сохранения метода синтеза уравнений. Теперь модель готова для использования в программе моделирования движения.
Переход к моделированию движения
Выберите пункт меню Объект/Моделирование.
Это приведет к запуску программы моделирования движения (UmSimul) с открытием в ней текущей модели.
Создание нового анимационного окна
Выберите пункт меню Инструменты/Анимационное окно.
Появится новое анимационное окно с изображением загруженной модели. Управление анимационным окном подробно излагается в файле справки программы
(Помощь/Руководство пользователя/Начинаем работать в UM) на стр. 23.
Для запуска моделирования выберите пункт меню Анализ/Моделирование. Появится окно инспектора моделирования объекта, см. рис. 10.
9
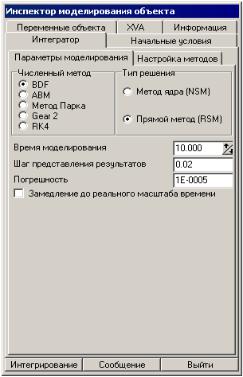
Рис. 10. Инспектор моделирования объекта
Задание начальных условий
Чтобы наш маятник закачался, его нужно предварительно отклонить. Для этого воспользуемся диалогом задания начальных условий.
Перейдите на закладку Начальные условия/Координаты Инспектора моделирования объекта.
Сейчас вы видите список всех координат системы. Для нашего маятника это одна координата в шарнире jМаятник.
Введите в поле Координата значение из исходных данных. Нажмите клавишу
Enter.
В анимационном окне маятник повернется на n радиан.
Примечание: 1 радиан = 180/π градусов, 1 рад ≈ 57,295779513°.
Моделирование движения маятника
После того как мы отклонили маятник, все готово к моделированию. Для начала просто запустим процесс моделирования на 10 секунд (установка по умолчанию).
Нажмите кнопку Интегрирование в окне инспектора моделирования.
В правом нижнем углу экрана появится окно отображения текущих параметров процесса интегрирования, см. рис. 11.
После окончания появится окно Инспектора режима паузы процесса моделирования. В нем вы можете увеличить время моделирования, изменить параметры численного метода, см. рис. 12.
Нажмите кнопку Прервать. Появится окно инспектора моделирования объекта.
10