

3080
.pdfС учетом (15) и (17) получим:
E 2 s − jI 2 x2 s − I 2 r2 = 0 . |
(21) |
Разделив все слагаемые равенства (21) на s, получим уравнение равновесия напряжений для обмотки ротора в следующем виде:
E2 − jI 2 x2 − |
I 2r2 |
= 0 . |
(22) |
|
s |
||||
|
|
|
Для обмотки статора уравнение равновесия напряжений при нагрузке двигателя с учетом (8) запишется в виде:
U1 = −E1 + I1 (r1 + jx1 ) . |
(23) |
Амплитудное значение МДС обмотки статора в режиме нагруженного двигателя равно:
F1 = 0,45m1I1W1kоб1 . |
(24) |
Уравнения токов асинхронного двигателя
При изменении нагрузки на валу двигателя меняются и токи в статоре I1 и роторе I2, а соответственно, и МДС обмотки статора F1 и ротора F2. Основной магнитный поток Φ, как и в трансформаторе, создается совместным действием МДС обмоток статора (первичной) и ротора (вторичной) и, как было отмечено ранее, сохраняется неизменным при изменении нагрузки. Однако следует отметить, что в трехфазном асинхронном двигателе эти магнитодвижущие силы вращаются в пространстве, и их можно складывать как в трансформаторе лишь в том случае, если они неподвижны относительно друг друга.
Докажем что магнитные поля статора и ротора вращаются с одинаковыми скоростями.
Скорость вращения ротора относительно обмотки ротора с учетом (14) равна:
n |
= |
60 f2 |
= |
f1s |
= n s . |
(25) |
|
|
|||||
22 |
|
p |
p |
1 |
|
|
|
|
|
|
|||
Скорость вращения обмотки ротора n2 можно выразить из формулы скольжения (2):
n2 = (1− s)n1 . |
(26) |
11
Скорость вращения магнитного поля ротора относительно неподвижного статора равна:
n21 = n22 + n2 . |
(27) |
С учетом (25) и (26) преобразуем выражение (27) к виду:
n21 = n1s + (1− s)n1 = n1 . |
(28) |
Таким образом, магнитное поле и МДС обмотки ротора F2 вращаются в пространстве с той же скоростью и в том же направлении, что и магнитное поле МДС обмотки статора F1, т. е. они неподвижны относительно друг друга. Поэтому складываясь, они создают результирующую МДС F0 и основной магнитный поток Φ. Следовательно, можно составить уравнение МДС асинхронного двигателя:
F 0 = F1 + F 2 . |
(29) |
Подставив вместо F1, F2, F0 их значения из (3), (24) и (9), получим:
0,45m1 I 0W1kоб1 = 0,45m1 I1W1kоб1 + 0,45m2 I 2W2kоб2 . |
(30) |
Разделив это равенство на m1W1kоб1 , получим:
I 0 |
= I1 + |
m2W2kоб2 |
I 2 = I1 + I '2 , |
(31) |
|||
|
|
||||||
|
|
|
m1W1kоб1 |
|
|||
где |
|
|
|
|
|
|
|
|
I '2 |
= |
m2W2kоб2 |
I 2 |
(32) |
||
|
|
||||||
|
|
|
|
m1W1kоб1 |
|
||
– ток обмотки ротора, приведенный к обмотке статора.
Преобразовав уравнение (31), получим уравнения токов обмотки статора асинхронного двигателя
I1 = I 0 + (I '2 ) , |
(33) |
из которого следует, что ток обмотки статора I1 имеет две составляющие: I0 – намагничивающую (почти постоянную) составляющую (I0 ≈ I1μ) и (I′2) – переменную составляющую, компенсирующую МДС обмотки ротора.
12

Приведенный асинхронный двигатель
Для упрощения расчетов и построения векторной диаграммы следует параметры обмотки ротора привести к обмотке статора, т. е. обмотку ротора с числом фаз m2, обмоточным коэффициентом kоб2 и числом витков одной фазной обмотки W2 заменить обмоткой с m1, W1, kоб1. При этом мощности и фазовые сдвиги векторов ЭДС и тока ротора после приведения должны остаться такими же, что и до приведения. Перерасчет реальных параметров обмотки ротора на приведенные выполняются по формулам, аналогичным формулам приведения параметров вторичной обмотки трансформатора.
При s = 1 приведенная ЭДС ротора:
E'2 = E2ke , |
(34) |
где ke = E1 = kоб1W1 – коэффициент трансформации ЭДС в асинхронном двигателе при
E2 kоб2W2
неподвижном роторе.
Приведенный ток обмотки ротора:
|
|
|
|
I '2 = |
I2 |
, |
(35) |
|
|
|
|||||
|
|
|
|
|
ki |
|
|
где ki = |
m1W1kоб1 |
= |
m1ke |
– коэффициент трансформации тока асинхронного двигателя. |
|||
m2W2kоб2 |
|
||||||
|
|
m2 |
|
|
|
||
В отличие от трансформаторов, в асинхронном двигателе коэффициенты трансформации тока и напряжения не равны (ke ≠ ki). Объясняется это тем, что число фаз в обмотке статора в общем случае неодинаково (m1 ≠ m2). Лишь в двигателях с фазным ротором, у которого m1 = m2, эти коэффициенты равны. В двигателях с короткозамкнутым ротором каждый стержень этой обмотки рассматривают как одну фазу. Поэтому число витков одной фазы короткозамкнутой обмотки ротора равно W2 = 0,5; обмоточный коэффициент такой обмотки kоб2 = 1, а число фаз m2 равно числу стержней в короткозамкнутой обмотке ротора.
Активное и индуктивное приведенные сопротивления обмотки ротора:
r'2 = r2keki ; |
(36) |
x'2 = x2keki . |
(37) |
Подставив в (22) приведенные значения обмотки ротора E' 2, I' 2, r ' 2, x' 2, получим уравнение напряжений обмотки ротора в приведенном виде:
13
E'2 = |
jI '2 |
x'2 |
− |
I '2 r'2 |
= 0. |
(38) |
|
s |
|||||||
|
|
|
|
|
|
Выражение rs'2 можно представить в виде:
r'2 |
= |
r'2 |
− |
r'2 s |
+ r'2 = r'2 +r'2 |
(1− s) |
, |
(39) |
|
s |
s |
s |
s |
||||||
|
|
|
|
|
тогда уравнение напряжений для цепи ротора в приведенных параметрах примет вид:
E'2 = |
jI '2 x'2 −I '2 r'2 −I '2 r'2 |
(1− s) |
= 0 . |
(40) |
|
s |
|||||
|
|
|
|
Для асинхронного двигателя (так же, как и для трансформатора) можно построить векторную диаграмму токов и напряжений по уравнениям напряжений обмоток статора (23), ротора (40) и уравнению токов (31), аналогичным уравнениям трансформатора.
Угол сдвига фаз между ЭДС E' 2 и током I ' 2:
|
|
x'2 |
s |
|
|
|
ψ 2 |
|
|
(41) |
|||
|
|
|||||
= arctg |
r'2 |
|
. |
|||
|
|
|
|
|
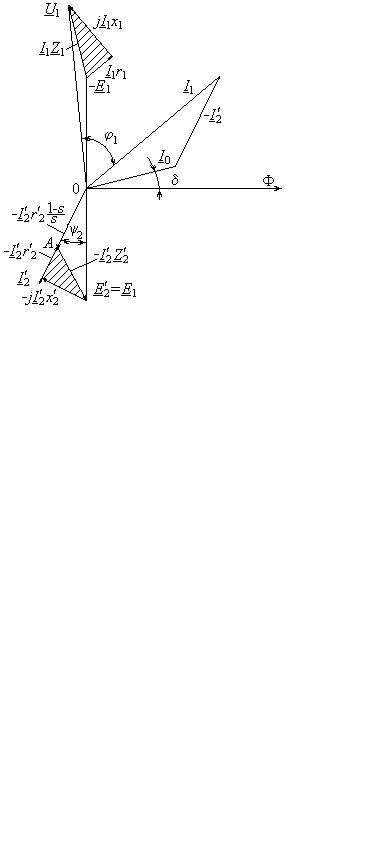
Векторная диаграмма асинхронного двигателя, построенная по этим формулам, приведена на рис 5.
Рис. 5. Векторная диаграмма асинхронного двигателя
14
От векторной диаграммы трансформатора она отличается тем, что сумма падений напряжений в обмотке ротора (во вторичной обмотке) уравновешивается ЭДС E′2 обмотки неподвижного ротора (n2 = 0), так как обмотка ротора замкнута накоротко. Однако,
если вектор падения напряжения OA = I '2 r'2 (1−s s) рассматривать как напряжение на не-
которой активной нагрузке r'2 (1−s s), подключенной на зажимы неподвижного ротора, то
векторную диаграмму асинхронного двигателя можно рассматривать как векторную диаграмму трансформатора, на зажимы вторичной обмотки которого подключено перемен-
ное активное сопротивление r'2 (1−s s). Иначе говоря, асинхронный двигатель в электри-
ческом отношении подобен трансформатору, работающему на чисто активную нагрузку. Активная мощность такого трансформатора:
P'2 = |
m1I '2 |
r'2 |
(1− s) |
(42) |
|
|
s |
|
|
||
|
|
|
|
|
|
представляет собой полную механическую мощность, развиваемую асинхронным двигателем.
Схема замещения приведенного асинхронного двигателя
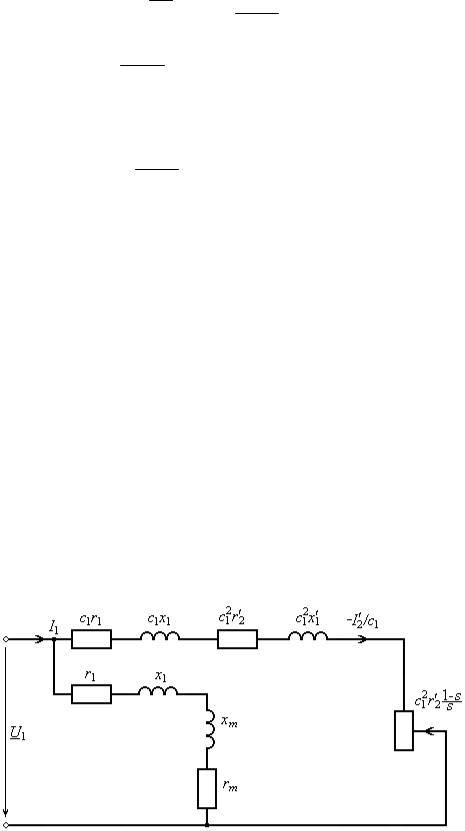
По уравнениям напряжений и токов, а также векторной диаграмме асинхронного двигателя может быть составлена электрическая схема замещения асинхронного двигателя. Схем замещения асинхронного двигателя может быть две – Т-образная и Г-образная. Г-образная схема более удобна для практических расчетов (рис. 6).
Рис. 6. Г-образная схема замещения асинхронного двигателя
15
Из Г-образной схемы замещения, приняв с1 = 1, запишем выражение тока обмотки ротора в рабочем контуре:
I '2 |
= |
|
|
|
|
|
U1 |
|
, |
(43) |
||
|
|
|
(1− s) |
2 |
||||||||
|
|
|
|
|
|
2 |
|
|||||
|
|
r1 |
+ r'2 |
|
|
|
|
|
|
+ (x1 + x'2 ) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
s |
|
|
|
|
или с учетом (39), получим: |
|
|
|
|
|
|
|
|
|
|
|
|
I '2 |
= |
|
|
|
|
U1 |
|
. |
(44) |
|||
|
r' |
|
|
|
2 |
|
|
|||||
|
|
|
|
2 |
|
|
2 |
|
||||
|
|
r1 + |
|
|
+ (x1 + x'2 ) |
|
||||||
|
|
|
|
|
||||||||
|
|
|
|
s |
|
|
|
|
|
|||
Вращающий момент и механические характеристики асинхронного двигателя
Вращающий момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем статора. Вращающий момент пропорционален электромагнитной мощности:
M = Pэм ,
ω1
где |
ω1 |
= |
2πn1 |
|
60 |
||||
|
|
|
–угловая синхронная скорость вращения.
Сучетом (1) для ω1 получим следующее выражение:
ω1 = 2πpf1 .
Выражение для электромагнитной мощности имеет следующий вид /3/:
(45)
(46)
(47)
P |
= P' |
+ P |
= m I ' 2 |
r' |
|
(1− s) |
+ m I ' |
2 r' |
|
= m I ' |
2 |
r'2 |
. |
(48) |
|
|
s |
|
|
|
|||||||||||
эм |
2 |
об2 |
1 2 |
|
2 |
1 2 |
|
2 |
1 2 |
|
s |
|
|||
После подстановки в (45) значений ω1 по (47) и электромагнитной мощности Pэм по (48) получим следующее выражение для вращающего момента:
16
|
2 r'2 |
|
|||
M = |
m1I '2 |
|
|
. |
|
s |
(49) |
||||
|
|
|
|||
|
2πf1 |
|
|||
p
Если значение тока ротора из выражения (44) подставить в (49), то получим следующую формулу вращающего момента асинхронного двигателя:
M = |
|
m U 2r' |
2 |
p |
|
. |
(50) |
||||
|
|
1 |
|
1 |
|
|
|
||||
|
|
r' |
2 |
|
2 |
|
2 |
|
|||
|
2πf1s r1 |
+ |
|
|
+ (x1 + x'2 ) |
|
|
||||
|
s |
|
|||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
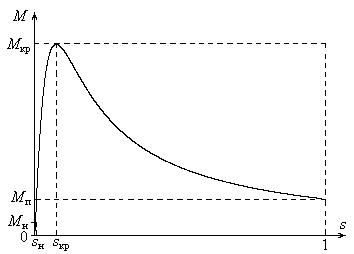
В этом выражении вращающего момента М единственной переменной величиной является скольжение s. Построенный по этой формуле график зависимости вращающего момента от скольжения приведен на рис. 7.
Рис. 7. График зависимости вращающего момента от скольжения
На графике имеется явно выраженный максимум. Это значение соответствует критическому скольжению и критическому вращающему моменту. Критическое скольжение, т. е. скольжение при наибольшем моменте вращения, обычно имеет значение порядка 0,2. Начальная часть графика от 0 до Мкр соответствует уравнению прямой линии, а вторая половина от Мкр до 1 соответствует уравнению гиперболы.
Критический момент разделяет кривую вращающего момента на устойчивую часть от s = 0 до s = sкр и неустойчивую часть от s = sкр до s = 1. В пределах устойчивой части характеристики динамическое равновесие моментов автоматически восстанавливается при изменении скольжения. Если нагрузка возрастает, то увеличивается скольжение, соответственно возрастает вращающий момент и наоборот. Но как только тормозящий момент достигнет значения критического момента двигателя, при дальнейшем увеличении
17
нагрузки возрастание скольжения будет лишь уменьшать вращающий момент и динамическое равновесие, нарушенное увеличением нагрузки, не восстановится. Вращающий момент уменьшается и двигатель останавливается.
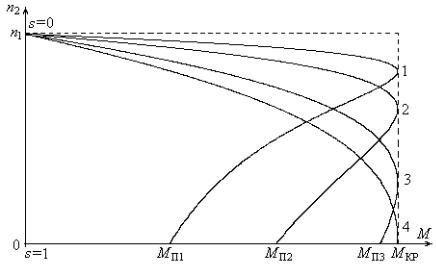
Механической характеристикой асинхронного двигателя называют зависимость скорости его вращения от вращающего момента, т. е. n2 = f1 (M ) . Кривая n2 = f1 (M ) может быть получена из кривой M = f (s) , так как скольжение обратно пропорционально n2: при s = 0 n2 = n1, а при s = 1 n2 = 0. На рис. 8 показаны механические характеристики двигателя при изменении r′2.
Рис. 8. Механические характеристики асинхронного двигателя при изменении r′2
Кривая 1 называется естественной механической характеристикой; она соответствует короткозамкнутой обмотке ротора, т. е. r′2 = 0. В цепи ротора имеется только активное сопротивление самой обмотки. При введении активного сопротивления r′2 в цепь ротора критический момент MКР не изменит своей величины, а скольжение sкр при этом увеличится. В результате получим кривую 2, показывающую, что пусковой момент увеличил-
ся (МП2 > МП1).
Кривая 3 соответствует еще большему увеличению активного сопротивления в цепи ротора. Кривая 4 отражает предельный случай, когда sкр = 1, т. е. когда активное сопротивление цепи ротора равно индуктивному сопротивлению двигателя. При этом условии вращающий момент при пуске МП равен критическому моменту МКР. Дальнейшее увеличение активного сопротивления вызывает уменьшение пускового момента.
Итак, при пуске асинхронного двигателя с фазным ротором для уменьшения пускового тока в цепи ротора вводят активное сопротивление.
Рабочие характеристики асинхронного двигателя
Под рабочими характеристиками понимают графически выраженные зависимости подведенной мощности P1, тока обмотки статора I1, КПД η, коэффициента мощности
18
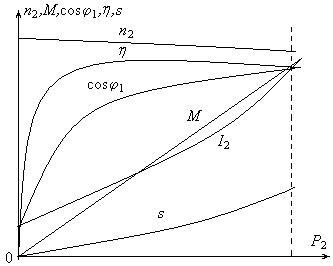
cosφ1, скольжения s, частоты вращения n2, момента М от отдаваемой мощности Р2 (полезной мощности на валу двигателя), при условии неизменности приложенного напряжения U1 и его частоты f1.
Примерный вид рабочих характеристик асинхронного двигателя показан на рис. 9.
Рис. 9. Рабочие характеристики асинхронного двигателя
Кривая зависимости скорости вращения ротора n2 от нагрузки P2 показывает, что с увеличением нагрузки скорость падает, так как n2 = n1 (1− s). При переходе от режима холостого хода к режиму с номинальной нагрузкой относительное снижение скорости составляет 2 – 7 %.
Кривая зависимости η = f (P2 ) имеет такой же характер, как и кривая КПД для трансформаторов и других электрических машин. На первом участке, когда еще малы, сильно сказываются постоянные потери. С увеличением нагрузки переменные потери становятся сравнимыми с постоянными и КПД возрастает. При равенстве переменных и постоянных потерь КПД достигает наибольшего значения. Перегрузка снижает КПД за счет превышения переменных потерь над постоянными.
Коэффициент мощности cosϕ1 повышается с увеличением нагрузки. В режиме холостого хода cosϕ1 имеет наименьшее значение – порядка 0,2, а в режиме с номинальной нагрузкой – наибольшее значение (0,8 – 0,93). При перегрузке cosϕ1 уменьшается. Вращающий момент М пропорционален мощности на валу двигателя Р2, если считать скорость n2 постоянной, поэтому характеристика M = f(P2) имеет вид почти прямой линии. С увеличением мощности на валу увеличивается момент, а также ток статора, который от тока холостого хода I0 возрастает до номинального тока I1Н при P2Н.
19
1.ПРЯМОЙ ПУСК В ХОД ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С РЕГИСТРАЦИЕЙ И ОТОБРАЖЕНИЕМ РЕЖИМНЫХ ПАРАМЕТРОВ
Цель работы: изучение принципа действия, конструкции асинхронного двигателя, с регистрацией и отображением режимных параметров.
Задание на подготовку к работе
1.Изучить теоретическую часть работы по одному из учебников и описанию этой лабораторной работы.
2.Ответить на контрольные вопросы.
3.Ознакомиться с расположением и назначением ручек управления и переключателей стенда.
Последовательность выполнения работы
1. Записать в табл. 1 паспортные данные исследуемого асинхронного двигателя. По паспортным данным рассчитать для этого двигателя число пар полюсов р, синхронную частоту вращения n1, номинальное скольжение sном, номинальный вращающий момент Мном и занести их в графу «Расчетные данные» табл.1.
Таблица 1
Номинальные данные асинхронного двигателя
Тип |
|
Паспортные данные |
|
|
Расчетные данные |
|
||||||
двигателя |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рном, |
Uном, |
Iном, |
η, |
сosφном |
n2ном, |
р |
|
n1, |
sном, |
Мном, |
|
|
кВт |
В |
А |
% |
|
об/мин |
|
|
об/мин |
% |
|
Н·м |
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Расчеты выполнить по следующим формулам (51) – (54):
p = |
60 f1 |
, |
(51) |
|
|||
|
n2ном |
|
|
(округлить до целого значения);
n = |
60 f1 |
, об/мин; |
(52) |
||
|
|
||||
1 |
|
p |
|
||
|
|
|
|||
sном = |
n1 − n2ном |
100% ; |
(53) |
||
|
|||||
|
|
n1 |
|
||
20