

Авсиевич_КР
.pdfТаблица 3
Некоторые команды Control System Toolbox
Синтаксис |
Описание |
|
|
|
|
pole(<LTI-объект>) |
Вычисление полюсов передаточной функции |
|
|
|
|
zero(<LTI-объект>) |
Вычисление нулей передаточной функции |
|
|
|
|
step(<LTI-объект>) |
Построение графика переходного процесса |
|
|
|
|
impulse(<LTI-объект>) |
Построение графика импульсной переходной функции |
|
|
|
|
bode(<LTI-объект>) |
Построение логарифмических частотных |
|
характеристик (диаграммы Боде) |
|
|
|
|
nyquist(<LTI-объект>) |
Построение частотного годографа Найквиста |
|
|
|
|
Для определения корней полиномов степени k, может также применяться команда MatLab roots(P), которая, в качестве аргумента P, получает матрицу коэффициентов полинома [pk, …, p0].
Другим вариантом получения графиков динамических характеристик САУ является использование графического интерфейса ППП CST - LTI viewer, вызов которого осуществляется командой ltiviewer, где в качестве параметра можно указать имя переменной, содержащей LTI-объект.
Таким образом, выполнение задания курсовой работы состоит из следующих шагов:
1)Изучить теоретические сведения.
2)Запустить систему MatLab 6.1.
3)Создать TF-объекта, в соответствии с заданным вариантом.
4)Составить дифференциальное уравнение, определяющее функционирование
САУ.
5) Определить полюса передаточной функции с использованием команды roots
или pole.
6) Определить нули передаточной функции с использованием команды roots или
zero.
7) Используя LTI - viewer, или соответствующие команды (табл.1) получить динамические характеристики - переходную функцию h(t), импульсно-переходную функцию w(t) и частотные характеристики - диаграмму Боде, частотный годограф Найквиста.
Пример. Найти динамические и частотные характеристики с использование MatLab, если задана передаточная функция САУ
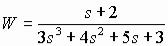 .
.
Найдем ее динамические и частотные характеристики с использованием ППП
Control System Toolbox системы MatLab. Будем работать в командном режиме. 1. Создадим LTI-объект с именем w, для этого выполним команду:
41
2. Найдем полюса и нули передаточной функции с использованием команд pole,
zero.
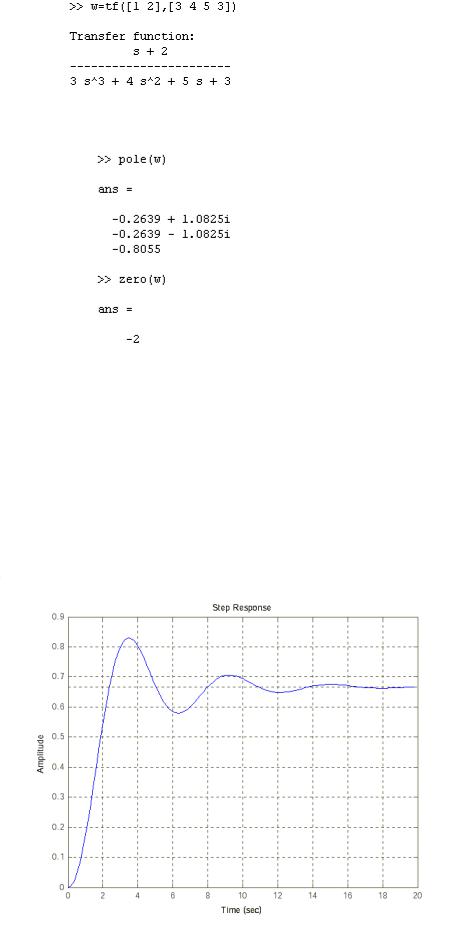
3.Построим переходную функцию командой step(w). Результат ее выполнения приведен на рис. 17.
4.Построим импульсную переходную функцию командой impulse(w). Результат показан на рис. 18.
5.Диаграмму Боде получим, используя команду bode(w) - рис. 19.
6.Определим частотный годограф Найквиста, выполнив команду nyuivist(w) - рис.
20.
Аналогичные результаты (рис. 21) можно получить, используя команду ltiviewer(w), с соответствующими настройками в меню "Plot Configuration".
Рис.17 . Переходная функция h(t)
42
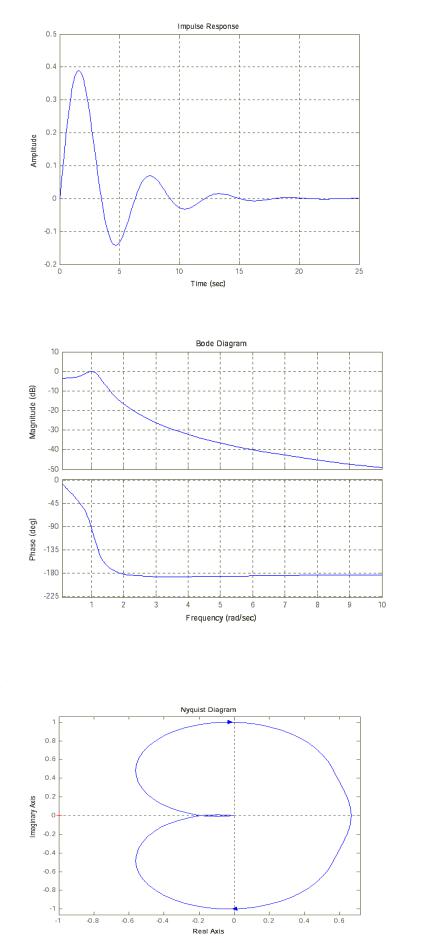
Рис 18. Импульсная переходная функция
Рис. 19. Логарифмические частотные характеристики
Рис. 20. Частотный годограф
43
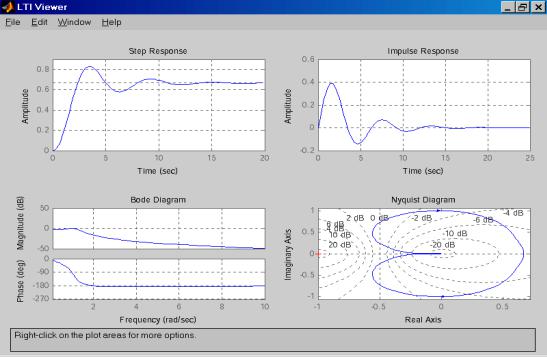
Рис. 21. LTI-viewer
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Араманович И.Г., Лунц Г.Л., Эльсгольц Э.Э. Функции комплексного переменного. Операционное исчисление. Теория устойчивости. М.: Наука, 1965. 390с.
2.Свешников А.Г., Тихонов А.Н. Теория функций комплексной переменной. М.:
Наука, 1970. 304с.
3.Ануфриев И.Е., Смирнов А.Б., Смирнова Е.Н. MATLAB 7. – СПб.: БХВ-
Петербург, 2005. – 1104 с.
4.Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования.
М.: Наука, 1975. 768с.
5.Бесекерский В.А. и др. Сборник задач по теории автоматического регулирования
иуправления. М.: Наука, 1978. 510с.
6.Гусев А.Н.,Вьюжанин В.А., Закаблуковский В.Д. Основы теории автоматического управления. Самар. аэрокосм.ун – т. Самара, 1996. 110с.
7.Д.Сю, Мейер А. Современная теория автоматического управления и ее применение. М.: Машиностроение, 1972. 552с.
8.Джон М. Смит.Математическое и цифровое моделирование для инженеров и исследователей. М.: Машиностроение, 1980.272с.
9.Зубов В.И. Методы Ляпунова и их применение. Л.: Издательство ЛГУ, 1972.
10.Иващенко Н.Н. Автоматическое регулирование. М.: Машиностроение, 1978.
736с.
11.Кузин Л.Т. Расчет и проектирование дискретных систем управления. М.: Гос.науч. – техн. изд – во машиностроительной лит – ры, 1962. 672с.
44
12.Метод гармонической линеаризации в проектировании нелинейных систем автоматического управления. Под редакцией Топчеева Ю.И. М.: Машиностроение, 1970. 567с.
13.Попов Е.П. Прикладная теория процессов управления в нелинейных системах. М.: Главная редакция физико – математической литературы, 1973. 584с.
14. 13.Свешников А.Г., Тихонов А.Н. Теория функций комплексной переменной.
М.: Наука, 1970. 304с.
15.Солодовников В.В.,Плотников В.Н.,Яковлев А.В. Основы теории и элементы систем автоматического регулирования. М.: Машиностроение, 1985. 536с.
17.Теория автоматического регулирования. Книга 1. Математическое описание, анализ устойчивости и качества систем автоматического регулирования. Под редакцией Солодовникова В.В. М.: Машиностроение, 1967. 768с.
18.Теория автоматического регулирования. Книга 2. Анализ и синтез линейных непрерывных и дискретных систем автоматического регулирования. Под редакцией Солодовникова В.В. М.: Машиностроение, 1967. 680с.
19.Юревич Е.И. Теория автоматического управления. Л.: Энергия, 1969. 375с.
45
Приложение 1
ТАБЛИЦА ИЗОБРАЖЕНИЙ
№ |
f(t) |
F(s) |
1 |
1 |
1 |
|
|
|
|
|
||||||
|
|
|
|
|
s |
||||||||
|
|
|
|
|
|
|
|||||||
2 |
t |
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
s2 |
||||||||
|
|
|
|
|
|
|
|||||||
3 |
1 t 2 |
|
1 |
|
|
|
|
|
|||||
|
|
|
|
|
s3 |
||||||||
|
2 |
|
|
|
|
|
|||||||
4 |
e at |
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
s a |
|||||||||
|
|
|
|
|
|
||||||||
5 |
te at |
|
1 |
|
|
|
|
|
|||||
|
|
|
(s a)2 |
||||||||||
|
|
|
|
|
|||||||||
6 |
1 e at |
|
|
|
|
|
a |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
s(s a) |
||||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
7 |
e at (1 at) |
|
|
|
|
|
s |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
(s a)2 |
||||||||||
|
|
|
|
|
|||||||||
8 |
1 e at (1 at) |
|
|
|
|
a2 |
|
||||||
|
|
s(s a)2 |
|||||||||||
|
|
|
|
||||||||||
9 |
e at e bt |
|
|
|
b a |
|
|||||||
(s a)(s b) |
|||||||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||
|
e at sin t |
|
|
|
|
|
|
||||||
10 |
|
|
|
|
|
|
|
|
|
|
|
||
|
(s a)2 |
||||||||||||
|
|
|
|||||||||||
11 |
e at cos t |
|
|
|
|
s a |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
(s a)2 |
||||||||||||
|
|
|
|||||||||||
46