

Министерство транспорта Российской Федерации
федеральное агентство железнодорожного транспорта
СамарскИЙ государственнЫЙ УНИВЕРСИТЕТ путей сообщения
УФИМСКИЙ ИНСТИТУТ ПУТЕЙ СООБЩЕНИЯ – ФИЛИАЛ САМГУПС
Факультет высшего профессионального образования
Кафедра общеобразовательных и профессиональных дисциплин
Конспект лекций
по дисциплине
«Теория Дискретных устройств
железнодорожной автоматики и телемеханики»
для студентов заочной формы обучения специальности
190402 – «Автоматика, телемеханика и связь на железнодорожном транспорте»
Составитель: Юсупов Р. Р.
Уфа 2011
1. Общие сведения
Устройства железнодорожной автоматики, телемеханики и связи (АТС) в основном относятся к классу дискретных устройств. Первые релейные системы автоматики на транспорте появились в 30-х годах нашего столетия. Тогда же были опубликованы работы Н. О. Рогинского и Н. В. Лупала, в которых описаны эти системы. На железных дорогах эксплуатируется большое число разнообразных систем электрической централизации, автоматической блокировки, диспетчерской централизации, систем горочной автоматики, устройств связи и др. Работают они в условиях усложненной эксплуатационной обстановки, связанной с движением поездов. Большинство систем имеют длительный срок службы, непрерывный характер работы и выполняют ответственные функции по обеспечению безопасности движения. Вследствие этого к железнодорожным системам АТС предъявляют повышенные требования с точки зрения надежности, безопасности и устойчивости работы.
Методы построения дискретных систем железнодорожной АТС с одной стороны являются общими методами, но, с другой стороны, они имеют и ярко выраженную специфику, определяемую особыми эксплуатационно-техническими требованиями, предъявляемыми к транспортным системам. В связи с этим в данном курсе мы рассмотрим общие и специальные методы анализа и синтеза дискретных устройств.
1.1. Характеристика дискретных элементов
Информация, передаваемая между отдельными узлами (блоками) в системах АТС, отображается дискретными сигналами. Каждый сигнал характеризуется определенным параметром, который может иметь два значения: одно из них условно принимают за 0, другое – за 1. Для физического представления информации применяют дискретные элементы, которые соответственно могут быть в двух состояниях: 0 или 1.Цифры 0 и 1 не дают никакой количественной оценки состояний элемента, они лишь обозначают эти состояния.
Каждому дискретному сообщению соответствует свой дискретный сигнал, представляющий собой некоторую последовательность символов 0 и 1 определенной длины, например 101100111. Эту последовательность символов называют кодовым словом. Его образуют с использованием алфавита, состоящего из двух букв: 0 и 1, называемых соответственно логическим 0 и логической 1. Кодовое слово можно рассматривать как некоторое число в двоичной системе счисления. Следовательно, информация в системах автоматики, телемеханики и связи может быть представлена в виде двоичных чисел, т. е. каждому дискретному сообщению должно соответствовать определенное число.
Двоичные числа представляют в виде комбинации состояний дискретных элементов. Функциональный блок систем автоматики, телемеханики и связи есть совокупность дискретных элементов, соединенных надлежащим образом.
Под дискретным элементом будем понимать устройство, выполняющее какую-либо функцию и имеющее релейную характеристику (рис. 1.1).

Рис. 1.1
У элемента с такой характеристикой изменение входной величины х вызывает скачкообразное изменение выходной величины z, принимающей лишь два дискретных значения: 0 и 1. У реальных элементов всегда имеется некоторое различие значений входного параметра (х1 и х0), при которых происходит изменение выходного параметра с 0 на 1 и обратно с 1 на 0.
Отношение входных параметров, соответствующих обратному и прямому изменениям выходной величины, называют коэффициентом возврата дискретного элемента
![]() .
.
Чем ближе к единице значение Кв, тем меньше могут отличаться друг от друга значения входного параметра, соответствующие логическим 0 и 1. Градации между значениями входного параметра должны быть выбраны с таким расчетом, чтобы находящиеся в пределах норм колебания значений напряжений источников питания, сопротивлений резисторов, емкости конденсаторов, помехи не приводили к неправильной работе дискретного элемента. При высоком коэффициенте возврата легче обеспечить надежную работу дискретного элемента.
В качестве параметров (признаков) входных и выходных сигналов дискретного элемента, как правило, применяют: значение амплитуды тока или напряжения (большая амплитуда соответствует значению сигнала 1, малая амплитуда – 0); значение сопротивления (равенство сопротивления между двумя зажимами нулю вследствие того, что цепь замкнута накоротко, соответствует значению сигнала 1; равенство этого сопротивления бесконечности вследствие разомкнутой цепи соответствует значению сигнала 0).
Наряду с указанными выше параметрами в системах АТС используют частоту тока или частоту следования импульсов, время (продолжительность) отдельных посылок, число импульсов, фазу тока или напряжения. Параметры входных и выходных сигналов дискретного элемента могут быть одинаковыми или различными. Переход элемента из одного состояния в другое может происходить практически мгновенно или с некоторой задержкой.
Дискретные элементы могут быть разделены на активные и пассивные. У активных элементов выходные сигналы создаются энергией специальных источников, а входные сигналы служат только для управления, как, например, у транзисторов и электромагнитных реле. В пассивных элементах выходной сигнал формируется энергией входных сигналов, как, например, у полупроводниковых диодов.
Дискретные элементы, способные сохранять свое состояние или выходной сигнал после прекращения действия входного сигнала, вызвавшего переход в это состояние, называют элементами памяти (элементами с фиксацией воздействия). Для перехода такого элемента в новое состояние требуется новое входное воздействие.
В общем случае дискретный элемент может быть представлен как (п–q)-полюсник (рис. 1.2), имеющий от 1 до п входов, на которые поступают входные сигналы x1, x2, ..., xn и от 1 до q выходов, на которых появляются выходные сигналы z1, z2, ..., zq.
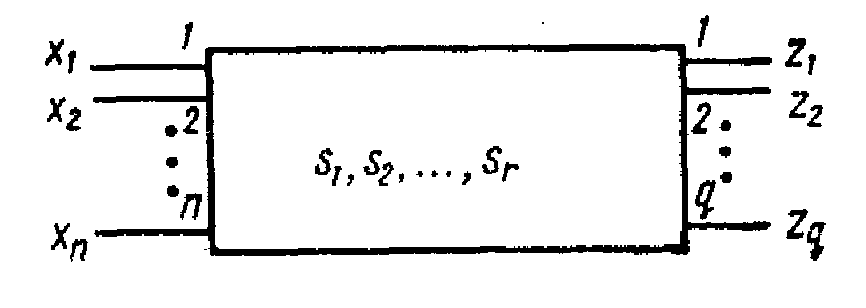
Рис. 1.2
Дискретный элемент состоит из реагирующих органов, воспринимающих входные сигналы, исполнительных, выдающих выходные сигналы, и промежуточных, перерабатывающих и передающих воздействие от реагирующих органов к исполнительным. Данные органы могут быть или явно выражены, или совмещены. Состояние частей и деталей элемента характеризует его внутреннее состояние, которое в общем случае может принимать г значений: s1, s2, ..., sr.
Двухпозиционные элементы имеют два внутренних состояния, одно из которых обозначают 0, а другое – 1. Такие элементы называют двоичными. Многопозиционные элементы характеризуются наличием трех и более состояний. Последовательность перехода элемента из одного состояния в другое определяется свойствами самого элемента и последовательностью поступления сигналов на его входы. Например, многопозиционными дискретными элементами являются нейтрально-поляризованные реле, многопозиционные переключатели, шаговые искатели. Нейтрально-поляризованное реле может находиться в трех состояниях, соответствующих отсутствию напряжения на его обмотке, наличию напряжения положительной полярности и наличию напряжения отрицательной полярности.
Дискретные элементы обладают свойством направленности, т.е. передача сигналов возможна только от входа к выходу, в этом случае состояния входов и внутренние состояния элемента не зависят от выходных сигналов. Другим важным свойством элемента является разделительность входов и выходов, заключающаяся в том, что сигнал, поступивший на один из входов (выходов), не вызывает появления сигнала на других входах (выходах).
Все электрические дискретные элементы можно разделить на два класса: контактные и бесконтактные, отличающиеся конструкцией и принципом действия.