

model-00ae89b6 / Л8_М_pr_
.docПланирование эксперимента
________________________________________________________________________________
где
![]() -
известные функции входных переменных
-
известные функции входных переменных
![]() ,
т.е.
,
т.е.
![]() (4.49)
(4.49)
![]() .
Обозначим
.
Обозначим
![]() .
.
Если
![]() -
транспонированная матрица
-
транспонированная матрица
![]() ,
то
,
то
![]() (4.50)
(4.50)
– ковариационная
матрица. Для линейной модели
![]() .
.
В
результате действия случайных факторов
экспериментатор получает математическую
модель отличную от (4.49):
![]() .
.
Определим
чувствительность решения (4.48) к небольшим
изменениям выходной величины
![]() ,
а следовательно и
,
а следовательно и
![]() за счет случайного фактора:
за счет случайного фактора:
![]() (4.51)
(4.51)
Из
выражения (4.51) следует, что чувствительность
решения "b"
по отношению к случайным факторам
выражается ковариационной матрицей
![]() .
.
План
эксперимента выбирается с учетом
минимизации чувствительности решения
(4.48) по отношению к случайным воздействиям.
Однако в том виде, в каком она предоставлена
в выражении (4.51) не представляется
возможным дать количественную оценку
чувствительности для разных планов
![]() .
Поэтому в качестве числовой характеристики
чувствительности принимают некоторую
из числовых характеристик ковариационной
матрицы
.
Поэтому в качестве числовой характеристики
чувствительности принимают некоторую
из числовых характеристик ковариационной
матрицы
![]() .
В зависимости от этого получают ряд
критериев
оптимальности.
.
В зависимости от этого получают ряд
критериев
оптимальности.
-
План называется А–оптимальным, если он минимизирует сумму квадратов главных полуосей эллипсоида рассеяния оценок. Известно, что при нормальном законе распределения результатов наблюдений, поверхностями постоянных значений функции плотности распределения
 являются эллипсоиды. Характеристики
эллипсоида полностью определяются
элементами матрицы
являются эллипсоиды. Характеристики
эллипсоида полностью определяются
элементами матрицы
 .
Для двухфакторного эксперимента дадим
геометрическую интерпретацию (рис.
4.12)
.
Для двухфакторного эксперимента дадим
геометрическую интерпретацию (рис.
4.12)
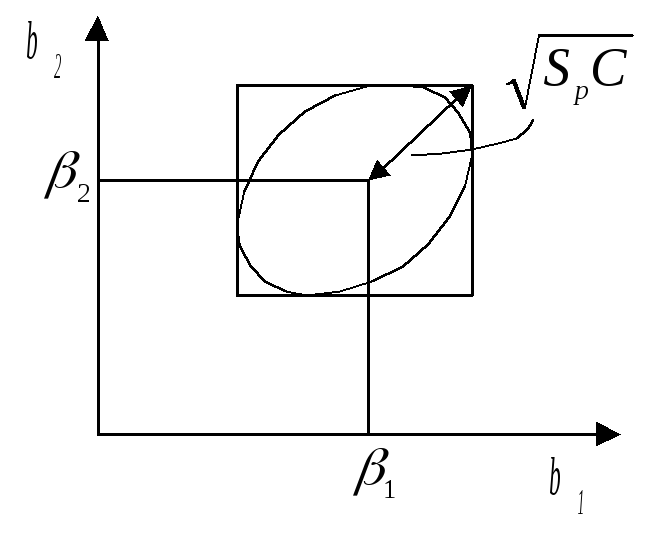
![]() обозначена сумма диагональных
элементов матрицы
обозначена сумма диагональных
элементов матрицы
![]()
![]()
Н а
языке матричной алгебры минимизации
суммы квадратов главных полуосей
эллипсоида означает минимизацию
следа (суммы диагональных элементов)
ковариационной матрицы уравнения
регрессии. Еще можно встретить название
минимизация средней дисперсии.
а
языке матричной алгебры минимизации
суммы квадратов главных полуосей
эллипсоида означает минимизацию
следа (суммы диагональных элементов)
ковариационной матрицы уравнения
регрессии. Еще можно встретить название
минимизация средней дисперсии.
-
План называется D–оптимальным, если он минимизирует величину определителя матрицы
 .
Это соответствует минимизации обобщенной
дисперсии.
.
Это соответствует минимизации обобщенной
дисперсии. -
Е–оптимальный план минимизирует максимальную ось эллипсоида рассеяния. Или еще можно назвать минимизацией максимального собственного числа матрицы
 или минимизации максимального
характеристического значения
ковариационной матрицы уравнения
регрессии.
или минимизации максимального
характеристического значения
ковариационной матрицы уравнения
регрессии. -
G–оптимальный план обеспечивает наименьшую по всем планам максимальную величину дисперсии предсказанных значений функции отклика в области факторного эксперимента. Эти планы называют минимаксными.
G–план можно определить из выражения
![]() (4.52)
(4.52)
План будет G–оптимальным, если
![]() (4.53)
(4.53)
Определитель
матрицы
![]() является наиболее полной числовой
характеристикой чувствительности.
D–оптимальным
план учитывает все элементы матрицы
является наиболее полной числовой
характеристикой чувствительности.
D–оптимальным
план учитывает все элементы матрицы
![]() .
Поэтому он лучше А
и Е–оптимальных
планов. Что касается G
– оптимальным,
то он эквивалентен D–оптимальному
плану. D–оптимальный
план минимизирует объем эллипсоида
рассеяния оценок коэффициентов модели.
.
Поэтому он лучше А
и Е–оптимальных
планов. Что касается G
– оптимальным,
то он эквивалентен D–оптимальному
плану. D–оптимальный
план минимизирует объем эллипсоида
рассеяния оценок коэффициентов модели.
Таким
образом, в качестве числовой характеристики
оптимальной оценки модели принимаем
определитель матрицы
![]()
![]() (4.54)
(4.54)
Критерием выбора оптимального плана является минимизация чувствительности по всем возможным планам
![]() (4.55)
(4.55)
т.к.
определитель матрицы
![]() всегда положителен.
всегда положителен.
4.14. D–оптимальные планы
4.14.1. Основные свойства D–оптимальных планов
Во
многих экспериментах некоторые параметры
не интересуют экспериментатора и он их
относит к "неизвестным" параметрам.
Пусть число интересующих параметров
будет
![]() ,
а не интересующих
,
а не интересующих
![]() .
Тогда
.
Тогда
![]()
![]() – интересующие экспериментатора
параметры;
– интересующие экспериментатора
параметры;
![]() – "неизвестные" параметры
– "неизвестные" параметры
![]()
![]()
![]()
Планы, построенные для подобных случаев, называются "усеченными". Условие D–оптимальности и эквивалентное ему условие G– оптимальности будет иметь вид:
![]() (4.56)
(4.56)
![]() (4.57)
(4.57)
где
![]() – дисперсия оценки
– дисперсия оценки
![]() ;
;
![]() ,
т.е.
,
т.е.
![]() .
.
![]() – матрица соответствующая "неизвестным"
параметрам.
– матрица соответствующая "неизвестным"
параметрам.
Величина
![]() в выражении (4.57) не влияет на месторасположение
максимумов. Для простоты примем
в выражении (4.57) не влияет на месторасположение
максимумов. Для простоты примем
![]() .
.
Доказано,
что для D–оптимального
плана при
![]() .
.
![]() . (4.58)
. (4.58)
4.14.2. Метод построения D–оптимальных планов
D–оптимальности,
требуют большое число наблюдений.
Например, при
![]() необходимо было провести более 1000
наблюдений.
необходимо было провести более 1000
наблюдений.
В конце 60х годов, построены специальные D–оптимальные планы с достаточно малым числом экспериментальных точек, такие как непрерывные D–оптимальные планы и квази D–оптимальные планы.
Непрерывные D–оптимальные планы связаны с нормированной информационной матрицей, элемент которой записывают следующим образом:
![]() (4.64)
(4.64)
Функция
![]() принимает положительные значения в
точках плана и равна нулю во всех
остальных точках пространства
принимает положительные значения в
точках плана и равна нулю во всех
остальных точках пространства
![]() .
Эту функцию рассматривают как вероятностную
меру на пространство
.
Эту функцию рассматривают как вероятностную
меру на пространство
![]() .
И для того, чтобы план был D–оптимальным
нужно выбрать среди всех вероятностных
мер на пространство
.
И для того, чтобы план был D–оптимальным
нужно выбрать среди всех вероятностных
мер на пространство
![]() ,
такую меру
,
такую меру
![]() ,
которая бы минимизировала
,
которая бы минимизировала
![]() .
Такие планы называются приближенными
или непрерывными.
Эти планы можно построить с помощью
конечного числа точек пространства
планирования и частот повторения
наблюдений в этих точках. Такая постановка
задачи сильно упрощает построение
планов, близких к D–оптимальным.
.
Такие планы называются приближенными
или непрерывными.
Эти планы можно построить с помощью
конечного числа точек пространства
планирования и частот повторения
наблюдений в этих точках. Такая постановка
задачи сильно упрощает построение
планов, близких к D–оптимальным.
Рассмотрим более общий случай построения непрерывных D–оптимальных планов. Предлагается производить вычисления по формулам:
![]() (4.65)
(4.65)
![]() (4.66)
(4.66)
где
![]() -
время;
-
время;
![]() – эффективность измерения в точке
– эффективность измерения в точке
![]() ;
;
![]() – определяется по формуле (4.57);
– определяется по формуле (4.57);
![]() – дисперсия точки
– дисперсия точки
![]() в плане
в плане
![]() .
.
Если
![]() ,
то
,
то
![]() и тогда
и тогда
![]() определяется по формуле (4.52).
определяется по формуле (4.52).
Остановимся
на случае
![]() .
Будем считать, что за время
.
Будем считать, что за время
![]() проводится только один эксперимент.
проводится только один эксперимент.
Тогда
![]()
Кроме
того, можно принять
![]() ,
т.к. , если
,
т.к. , если
![]() будет отличное от единицы, то появляется
в левой и правой части выражение (4.65)
постоянный коэффициент, который не
повлияет на местоположение максимума.
Аналогично принимаем за единицу
будет отличное от единицы, то появляется
в левой и правой части выражение (4.65)
постоянный коэффициент, который не
повлияет на местоположение максимума.
Аналогично принимаем за единицу
![]() .
Для рототабельных планов, с учетом
сказанного, выражения (4.65) и (4.66) примут
вид:
.
Для рототабельных планов, с учетом
сказанного, выражения (4.65) и (4.66) примут
вид:
![]() (4.67)
(4.67)
![]() (4.68)
(4.68)
4.14.3. Синтез D–оптимальных тестирующих сигналов для идентификации динамических объектов
Ранее были рассмотрены методами идентификации статистических объектов, так называемая пассивная идентификация.
Методы идентификации динамических объектов – активная идентификация – представляет собой более сложную задачу, т.к. их применение связаны с необходимостью нарушения технологического режима идентифицирующего объекта, но и имеют значительно больше возможностей.
Активная идентификация предполагает подачу на вход объекта специального тестирующего сигнала. При этом результаты идентификации, характеризуемые статистическими свойствами модели, полученной с помощью заданного метода оценивания (максимального правдоподобия, наименьших квадратов и т.п.), существенно зависят от структуры и параметров тестирующего сигнала. Выбор структуры параметров тестирующего сигнала представляют собой наиболее сложную часть общей задачи активной идентификации.
Кроме структуры и параметров, включающих всю необходимую информацию о тестирующем сигнале, как функции времени, на качество