

Планирование эксперимента
________________________________________________________________________________
Глава 4. Планирование эксперимента Введение
Математические модели объектов автоматического управления можно подразделить на два большие класса: статические и динамические модели.
Под математической моделью будем понимать уравнение, связывающее выходную величину модели с входными независимыми величинами.
Y=f(x1,x2,...,xn,t)
Эту функциональную зависимость в планировании эксперимента называют функцией отклика, а входные независимые величины - факторами.
Модель в динамике учитывает динамические связи между выходными и входными величинами, а в статике функциональная зависимость выражается статическими связями.
Методы планирования эксперимента позволяют строить как статические, так и динамические модели. Те и другие могут быть определены аналитическими и экспериментально- статистическими методами.
Теория оптимального эксперимента на начальном этапе развития имитационного моделирования применялась преимущественно при построении моделей статических объектов. Что касается построения динамических моделей, то методология построения базировалась в рамках пассивного эксперимента, когда идентификация велась в режиме нормального функционирования объекта. Однако, постепенно стали применять и активные методы идентификации с использованием специальных тестирующих сигналов. В качестве таких сигналов использовали псевдослучайные сигналы.
С начала 70-х годов начинает бурно развиваться современная теория идентификации динамических моделей, опирающаяся на теорию оптимального эксперимента.
Планирование эксперимента - это постановка опытов по некоторой заранее составленной схеме; средство построения математической модели реального процесса; способ сокращения средств и времени. Процессом называется серия реальных операций.
Производство представляет собой единство четырех взаимосвязанных процессов:
технологический процесс ( превращение сырья в готовый продукт);
технический процесс (передача или превращение одного вида энергии или вещества в другой);
организационный процесс (координация всех элементов производства во времени и пространстве);
экономический процесс (координация интересов субъекта производства и народного хозяйства в целом).
Так же существуют процессы социальные, биологические и т.д.
Мы будем в основном находить математические модели технологических и технических процессов.
Моделью будем называть математическое описание реального процесса.
Модели бывают:
детерминированные (рис. 4.1)
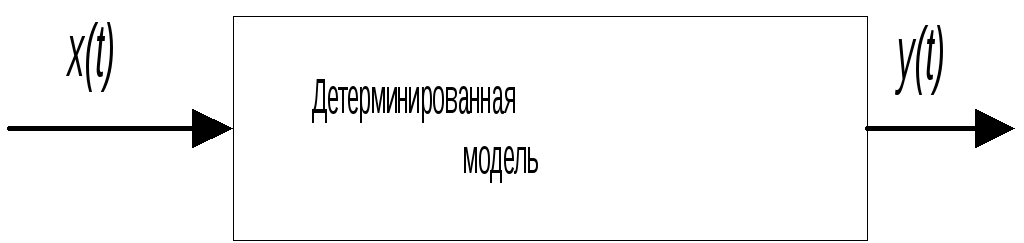
Рис. 4.1.
детерминированная с добавлением к выходной величине случайной ошибки (рис.4.2).
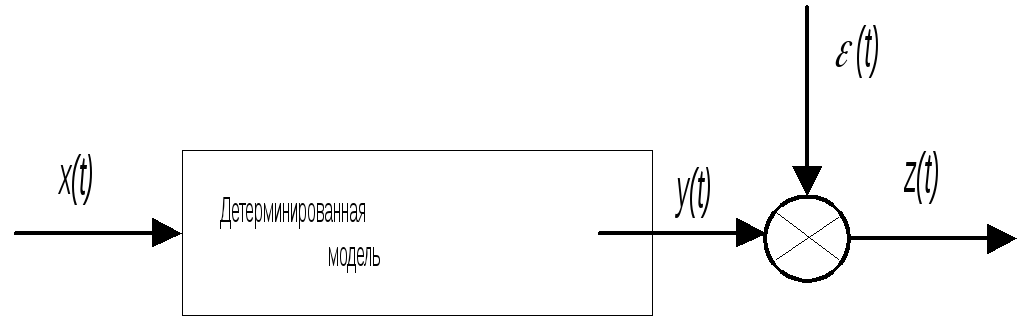
Рис.4.2.
статистическая (рис.4.3).
Рис.4.3.
Статистическая модель есть математическое описание случайного процесса. Статистической моделью является и детерминированная модель с добавлением к выходной величине случайной ошибки. Они бывают стационарные и нестационарные. В свою очередь стационарные модели могут быть эргодические и неэргодические.
Для эргодического процесса, если взять достаточно большой интервал времени, то по одной реализации можно создать представление о случайном процессе в целом.
Для неэргодического процесса среднее значение для каждой реализации своё и здесь нельзя с помощью одной реализации описать процесс. Среднее по времени не равно среднему по множеству.