

УМК - ЭЛЕКТРОМЕХАНИКА / Лабораторно-практические занятия / ЭМ - 2
.3.doc
Лабораторная работа № 2-3.
Исследование машины постоянного тока
с независимым возбуждением
Цель работы: исследовать характеристики машины постоянного тока с независимым возбуждением в различных режимах работы
-
Основные теоретические положения
В машинах постоянного тока с независимым возбуждением питание обмотки возбуждения осуществляется от отдельного источника, к ним также относятся машины с постоянными магнитами.
Важнейшими
их характеристиками являются:
электромеханические
(скоростные) и
механические характеристики,
которые
представляют
собой зависимости частоты вращения от
тока якоря
![]() ,
и от электромагнитного момента
,
и от электромагнитного момента
![]() соответственно:
соответственно:
![]() ;
(1)
;
(1)
![]() ,
(2)
,
(2)
где
![]() – сумма собственного сопротивления
обмотки якоря, и всех включенных
последовательно с ней сопротивлений.
– сумма собственного сопротивления
обмотки якоря, и всех включенных
последовательно с ней сопротивлений.
При
условии неизменности основного потока
возбуждения
![]() характеристики, описываемые этими
уравнениями, подобны, и представляют
собой прямые линии, а момент прямо
пропорционален току:
характеристики, описываемые этими
уравнениями, подобны, и представляют
собой прямые линии, а момент прямо
пропорционален току:
![]() ,
(3)
,
(3)
где величина СМФв представляет собой постоянный коэффициент пропорциональности, определяемый по паспортным данным МПТ:
![]() .
(4)
.
(4)
При независимом возбуждении возможны следующие режимы: двигательный, генераторного (рекуперативного) торможения; динамического торможения; торможения противовоключением. Признаком тормозных режимов является противоположное направление развиваемого МПТ момента и частоты вращения якоря. Характеристики МПТ НВ в этих режимах располагаются в четырех квадрантах (рис.1).
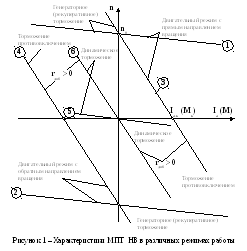
Характеристика
1 при
![]() называется
естественной,
располагается в 1-м
квадранте, и продолжается во 2-м
и 4-м
квадрантах. Ее координаты определяются
двумя точками. На оси абсцисс это точка
с координатами
называется
естественной,
располагается в 1-м
квадранте, и продолжается во 2-м
и 4-м
квадрантах. Ее координаты определяются
двумя точками. На оси абсцисс это точка
с координатами
![]() ;
;
![]() и частотой вращения идеального холостого
хода, которая равна:
и частотой вращения идеального холостого
хода, которая равна:
![]() .
(5)
.
(5)
Вторая точка соответствует моменту пуска двигателя, который, эквивалентен режиму короткого замыкания обмотки якоря. При этом:
![]() ;
;
![]() ;
;
![]() .
(6)
.
(6)
Участок характеристики, заключенный между этими точками, соответствует двигательному режиму работы с прямым направлением вращения, продолжение ее во 2-м квадранте − генераторному (рекуперативному) торможению, продолжение в 4-м квадранте (на рис. 3.2 не показано) − торможению противовключением. Характеристика 2, расположена в 3-м квадранте, продолжается во 2-м и 4-м квадрантах, является зеркальным отображением характеристики 1, и соответствует обратному направлению вращения якоря МПТ. Искусственную характеристику 3 получают путем введения в цепь якоря добавочных сопротивлений. Аналогично характеристике 1 она располагается в 1-м (двигательный режим), 2-м (генераторное торможение), и 4-м (торможение противовключением) квадрантах. Увеличение наклона характеристики приводит к изменению второй координаты:
![]() ;
;
![]() .
(7)
.
(7)
Характеристика 4 является зеркальным отображением характеристики 3, и описывает те же режимы работы, но при обратном направлении вращения машины в режиме двигателя.
Характеристики 5 и 6 соответствуют режиму динамического торможения при отсутствии (5) и наличии (6) добавочного сопротивления в цепи якоря. При динамическом торможении обмотка якоря замыкается на сопротивление, и ток в ней изменяет направление. Одна координата всего семейства характеристик находится в начале координат, а вторая определяется по формулам:
![]() ;
;
![]() ,
(8)
,
(8)
где nнач − частота вращения в момент начала торможения.
В двигательном режиме работы направление электромагнитного момента совпадает с направлением частоты вращения, ток потребляется из сети.
Режим рекуперативного торможения возникает, если под действием внешнего момента частота вращения якоря превысит частоту идеального холостого хода. Для исследований этого режима в лабораторных условиях необходимо, чтобы нагрузочная машина работала в режиме двигателя. Направление вращения якоря исследуемой и нагрузочной машин должно быть одинаковым, а частоту вращения с помощью нагрузочной машины нужно увеличить таким образом, чтобы она стала больше частоты идеального холостого хода исследуемой машины, момент ИМ при этом изменяет знак на противоположный.
Торможение противовключением достигается в том случае, если: 1 – под действием внешнего момента направление вращения якоря изменится на противоположное (характеристика является продолжением двигательного режима в четвёртом квадранте); 2 – в результате изменения полярности тока якоря по отношению к магнитному потоку при вращающемся якоре развиваемый машиной момент становится противоположным по знаку направлению вращения (характеристика является продолжением двигательного режима с обратным направлением вращения во втором квадранте). Если питание якоря не отключить, когда частота вращения уменьшится до нуля, машина перейдёт в двигательный режим с обратным направлением вращения. Для ограничения тока при торможении противовключением в цепь якоря добавочное сопротивление. Для исследования этого режима необходимо включить нагрузочную машину таким образом, чтобы направление вращения якоря у неё было противоположным по отношению к исследуемой машине, а развиваемый ею момент превышал момент исследуемой машины.
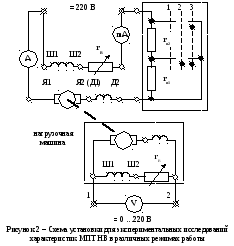
Динамическое торможение осуществляется путём отключения обмотки якоря от питающей сети и быстром замыкании её на тормозное сопротивление при неизменном потоке возбуждения. Вращающий момент изменяет знак на противоположный. При исследовании режима динамического торможения поток возбуждения остается неизменным, а якорь исследуемой машины отключается от источника питания, замыкается на тормозное сопротивление, и приводится во вращение с помощью нагрузочной машины.
Схема экспериментальной установки для исследования этих режимов показана на рис. 2.
-
Порядок выполнения работы
2.1. Записать паспортные данные исследуемой электрической машины. Произвести необходимые расчёты и построить скоростные характеристики для различных режимов работы машины, как это показано на рис. 1. Поток возбуждения и напряжение принять равными номинальным значениям, добавочное сопротивление измерить, а сопротивление якоря рассчитать по формуле:
![]() .
.
2.2. Подготовить стенд к работе, для чего:
-
установить переключатель пускового реостата в крайнее левое положение (максимальное сопротивление);
-
установить рукоятки регуляторов тока возбуждения ИМ и НМ в крайнее правое положение (максимальный ток возбуждения);
-
установить с помощью фазорегулятора минимально возможное напряжение.
2.3. Собрать схему изображённую на рис. 2, (не подключая вначале исследуемую машину к источнику питания!) Произвести пробный пуск нагрузочной машины и определить направление её вращения
2.4. Подключить питание к исследуемой машине и произвести её пробный пуск (не включая нагрузочную машину!). Направление вращения машин должно быть одинаковым. В противном случае следует изменить полярность обмотки якоря или обмотки возбуждения исследуемой машины и повторить опыт.
2.5. Постепенно повышая напряжение на зажимах НМ и увеличивая обороты, произвести замеры тока и частоты вращения:
-
в двигательном режиме (ток положителен, частота вращения меньше частоты вращения идеального х.х.);
-
в режиме идеального холостого хода (частота вращения равна частоте идеального х.х., ток равен нулю);
-
в генераторном режиме (частота вращения превышает частоту идеального х.х., ток изменяет знак).
2.6. Ввести в цепь якоря исследуемой машины максимальное добавочное сопротивление и изменить направление её вращения
2.7. Уменьшить подводимое к якорю нагрузочной машины напряжение до минимума и произвести пуск. Постепенно повышая напряжение, добиться снижения частоты вращения до нуля и затем перевести исследуемую машину в режим торможения противовключением. Произвести необходимые измерения.
2.8. Якорь исследуемой машины отключить от источника питания и замкнуть на тормозное сопротивление, оставив при этом включенной обмотку возбуждения. Постепенно увеличивая напряжение, подводимое к нагрузочной машине, произвести измерения тока и частоты вращения в режиме динамического торможения.
2.9. Характеристики, полученные опытным путем, построить на том же графике, что и расчетные. Сделать выводы.