

modelirovanie_1 вар 7
.doc«Математическое моделирование механической части электропривода с электродвигателем постоянного тока независимого возбуждения».
-
Цель работы.
Исследование динамических свойств механической части электропривода на примере трехмассовых и эквивалентных им двухмассовых расчетных схем.
|
Вариант |
Параметры |
||||||||
|
№ |
J2 кг м2 |
J3 кг м2 |
С12 Нм |
С23 Нм |
12 |
23 |
MC Нм |
с-2 |
1 с-1 |
|
7 |
0,15 |
0,8 |
175 |
200 |
0,1 |
0,15 |
50 |
100 |
230 |
2. Выбор электродвигателя
Выбор двигателя ориентировочно выбирается по мощности:
РН kз МС.М.МАКС М.МАКС
РНmin = 1,2*50*230 = 13800 Вт
РНmax = 10*50*230 = 115000 Вт
где kз = 1,2…10 – коэффициент, учитывающий требования к динамическим характеристикам ЭП (меньшему времени переходного процесса соответствует большее значение коэффициента). При мощности до 1,5 кВт рекомендуется выбрать двигатель на номинальное напряжение UH 110 В, от 1,5 до 6 кВт на 220 В, свыше 6 кВт – на 440 В.
Выбираем двигатель:
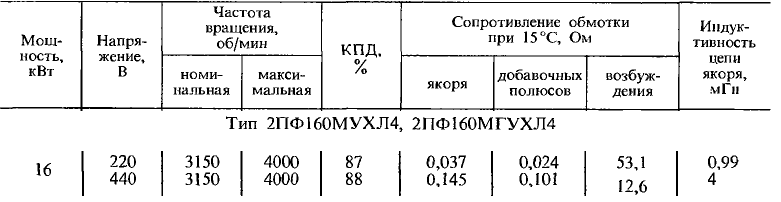

Передаточное число редуктора
jР= Н/М.МАКС = 329,2/230 =1,43
где Н 0,1045 n Н = 0,1045*3150 =329,2– номинальная угловая скорость двигателя, n Н - номинальное число оборотов вала в минуту.
МН = РН/Н = 16000/329,2= 48,603Н*м.
Для проверки выбранного двигателя определяют эквивалентный момент:
МЭ
=
![]()
МЭ
=
![]()
Суммарный момент инерции двигателя с редуктором:
J1=JД + JP = JД + 0,1 JД = 1,1 JД
J1 =1,1*0,083=0,0913
где JД , JP - соответственно моменты инерции двигателя и редуктора.
Суммарный момент инерции электропривода:
J = J1=0,3*0,0913=0,0274
Максимальное ускорение вала двигателя:
МАКС = М.МАКС jР =100*1,43=143
-
Структурная схема трехмассовой упругой системы:

Решив биквадратное уравнение, получаем корни характеристического
уравнения системы:
p1
=0
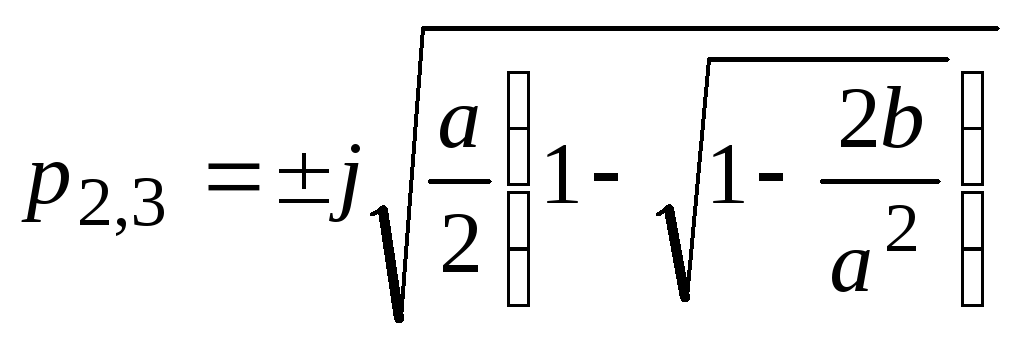
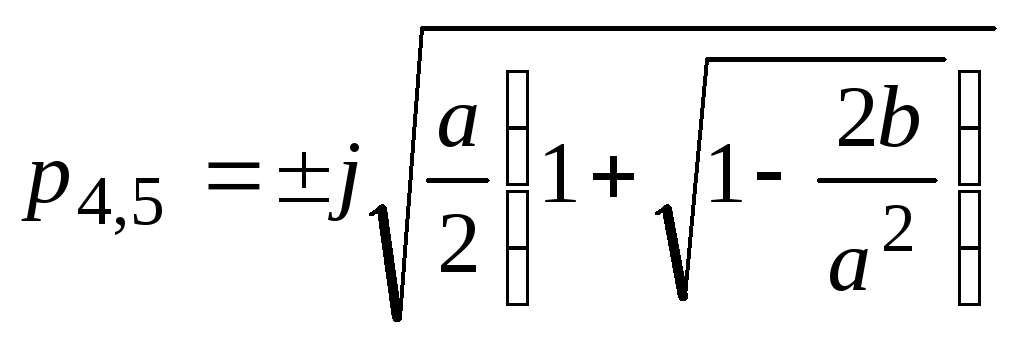
где
![]()
![]()
Анализ корней показывает, что при всех реальных сочетаниях параметров подкоренные выражения представляют собой действительные положительные числа.
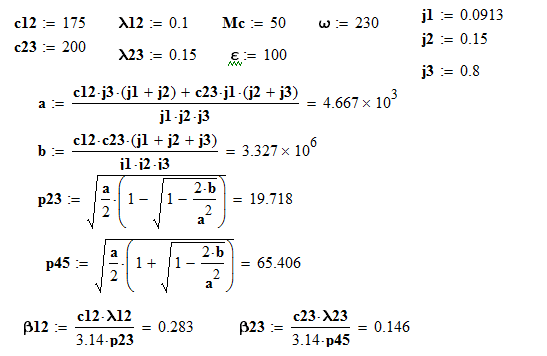

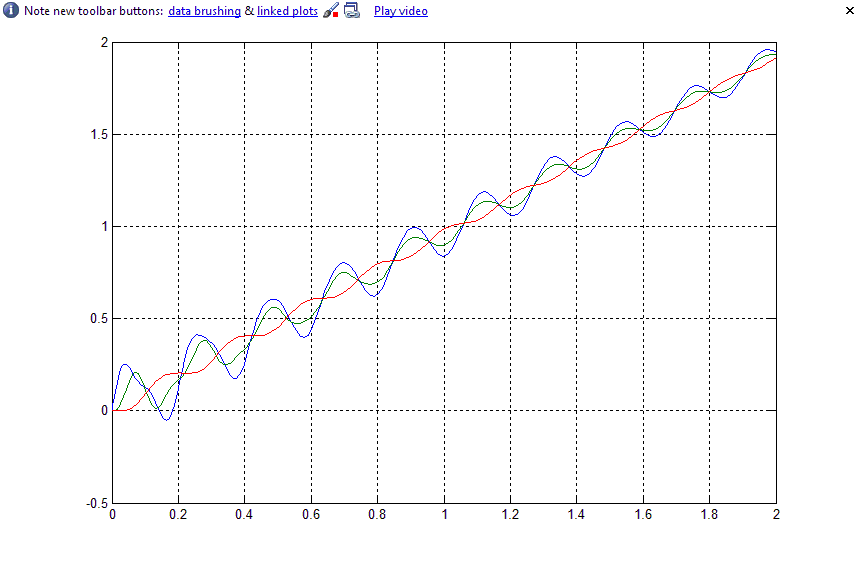
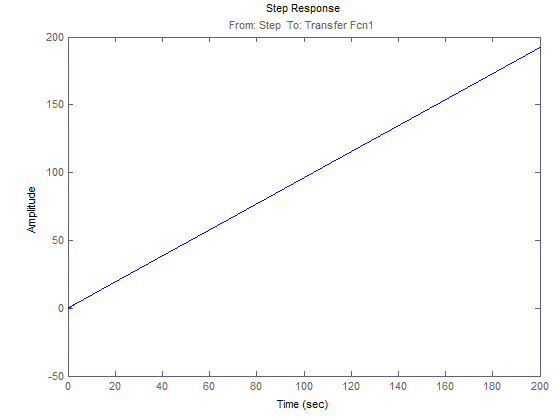
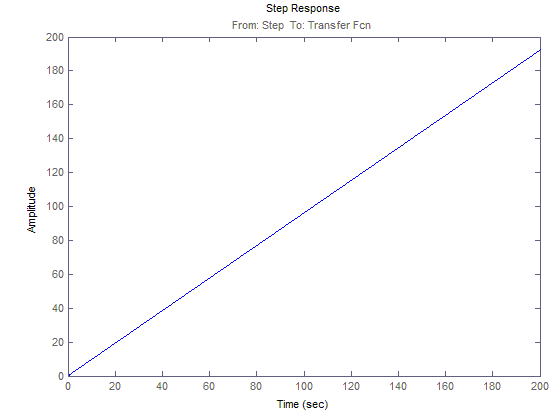
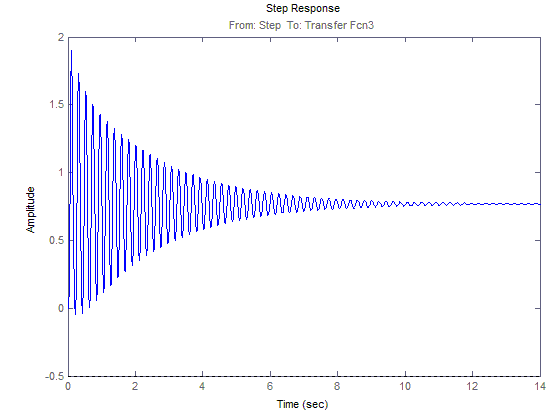
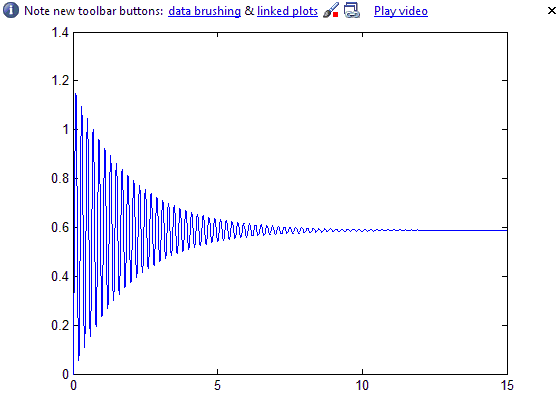
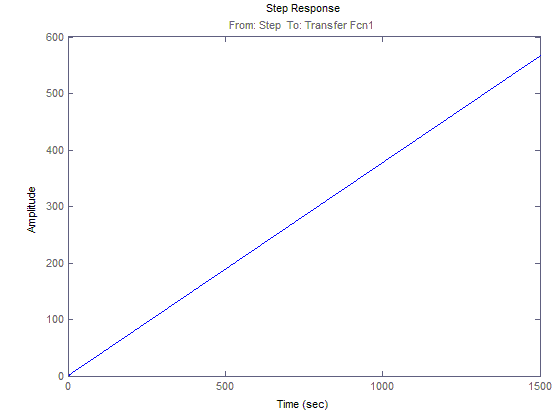
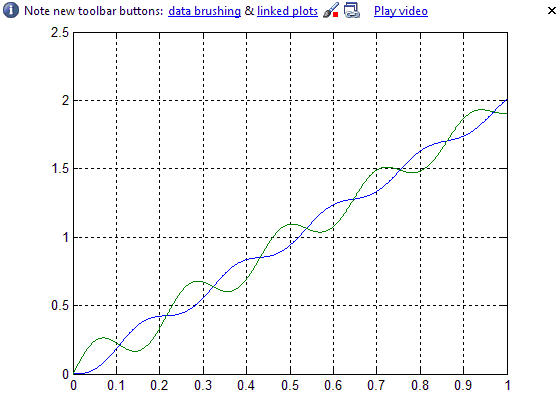
График зависимости 1(t)
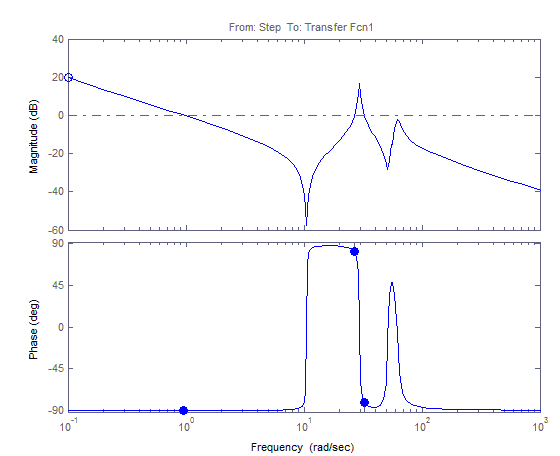
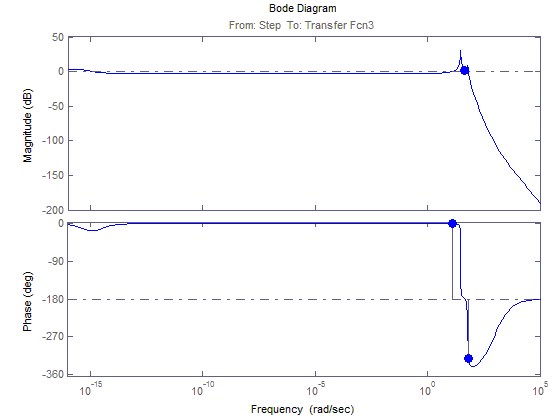
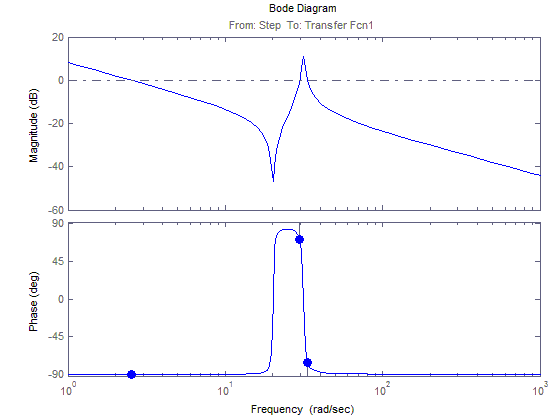
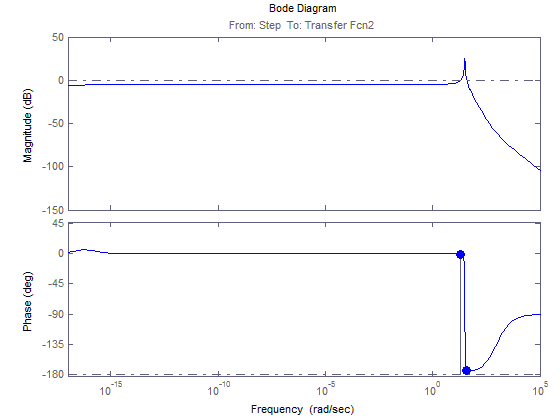
ЛАЧХ и ЛФЧХ для 1(t)
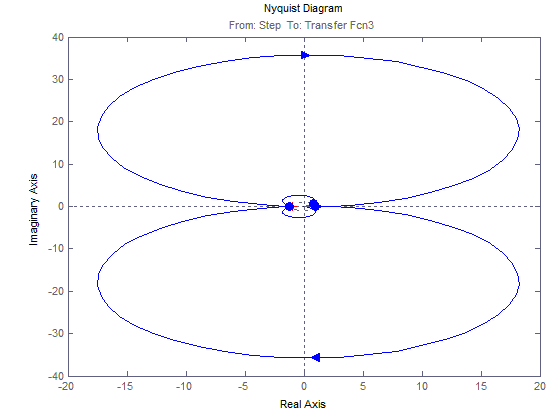
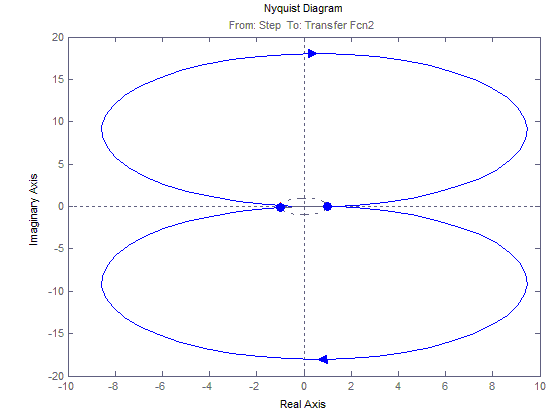
АФЧХ для 1(t)

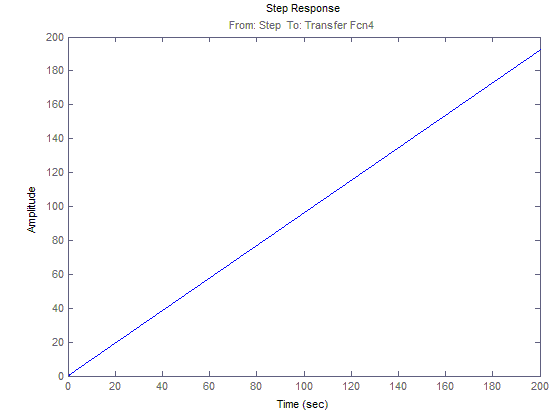
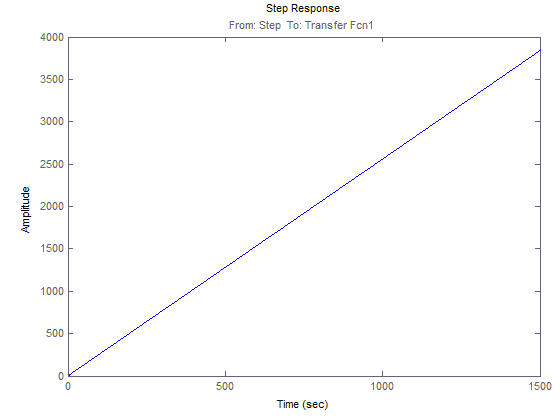
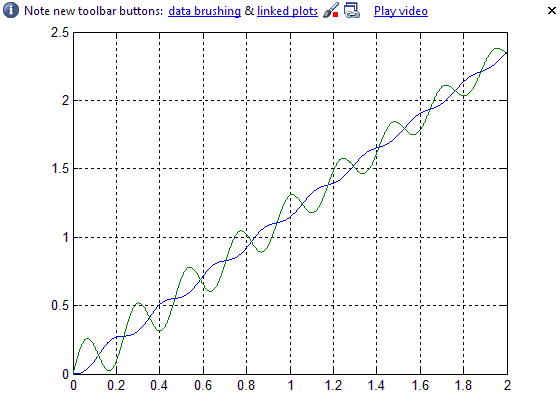
График зависимости 2(t)
ЛАЧХ и ЛФЧХ для 2(t)

АФЧХ для 2(t)
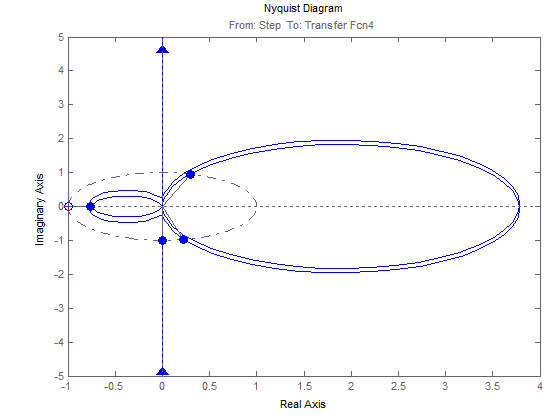
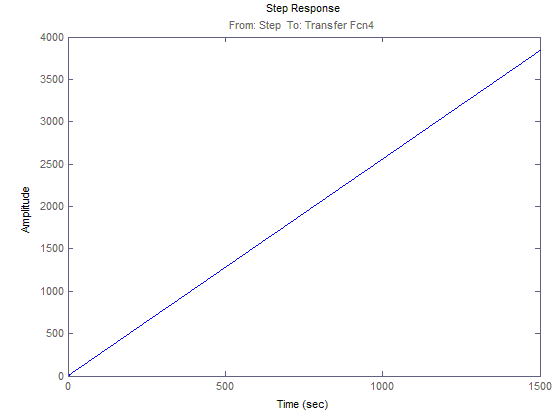
График зависимости 3(t)
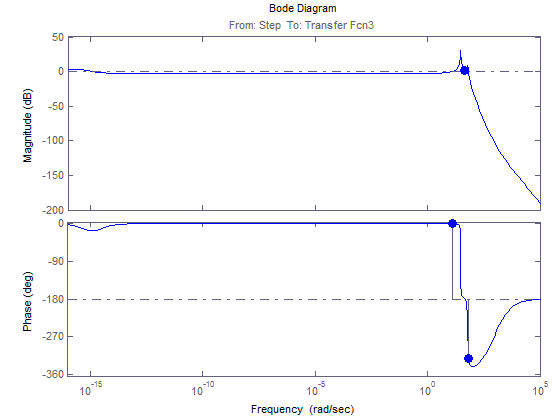
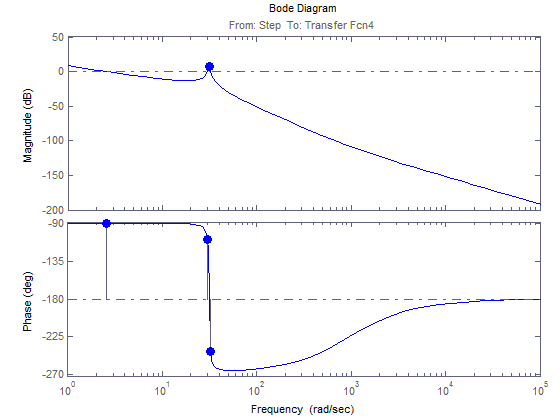
ЛАЧХ и ЛФЧХ для 3(t)

АФЧХ для 3(t)
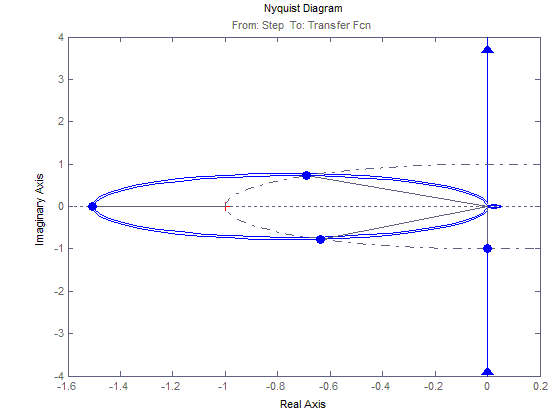
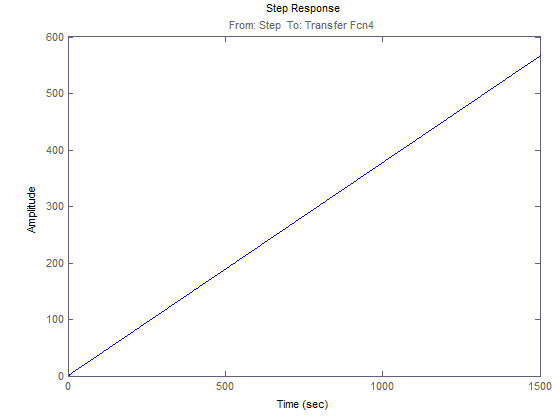
График зависимости М12(t)

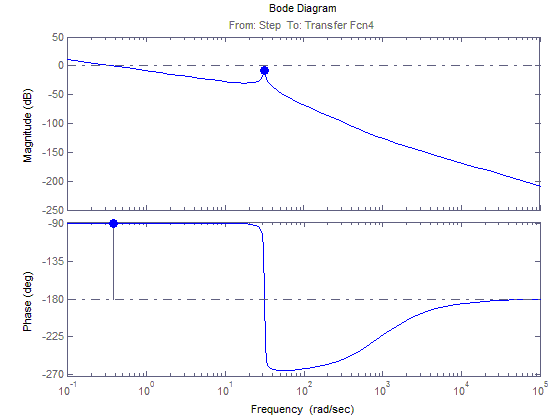
ЛАЧХ и ЛФЧХ для М12(t)
АФЧХ для М12(t)
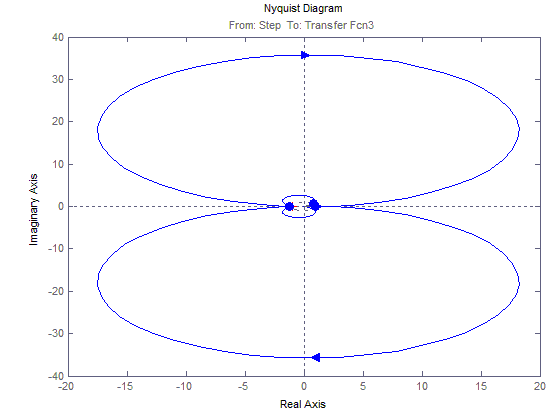
График зависимости М23(t)
ЛАЧХ и ЛФЧХ для М23(t)
АФЧХ для М23(t)
Э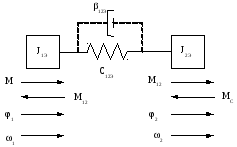 квивалентная
расчетная схема двухмассовой упругой
механической системы.
квивалентная
расчетная схема двухмассовой упругой
механической системы.
Приведение к двухмассовой системе:
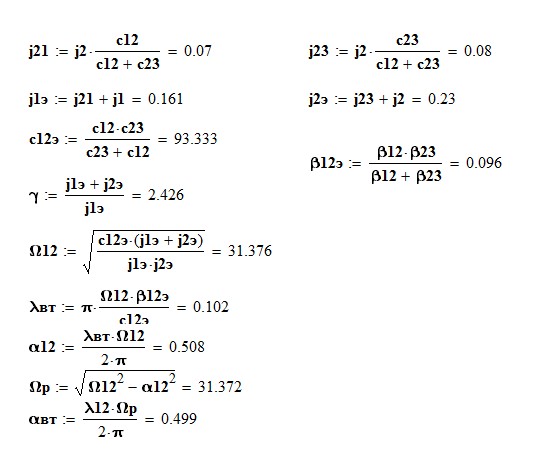

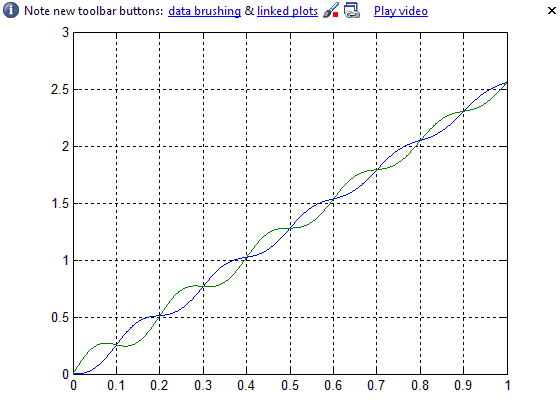
График зависимости 1(t)
ЛАЧХ и ЛФЧХ для 1(t)
АФЧХ для 1(t)
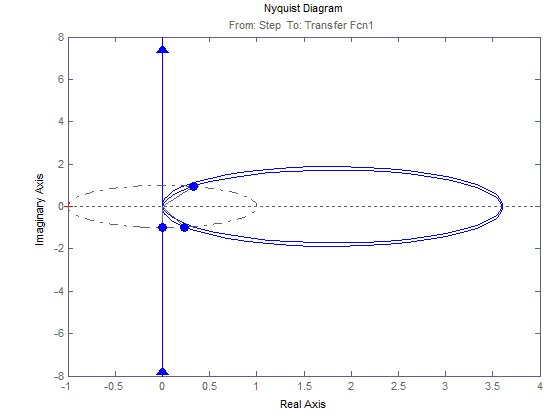
График зависимости 2(t)
ЛАЧХ и ЛФЧХ для 2(t)
АФЧХ для 2(t)
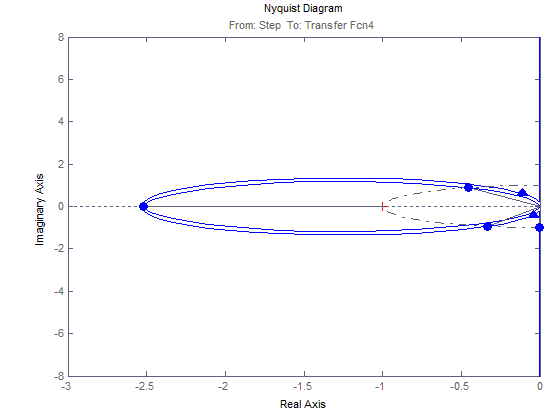
График зависимости М12(t)
ЛАЧХ и ЛФЧХ для М12(t)

АФЧХ для М12(t)
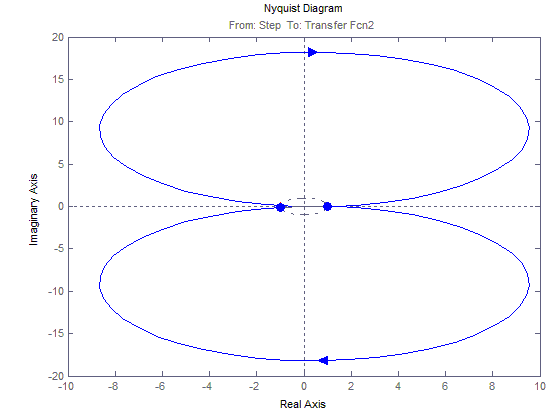
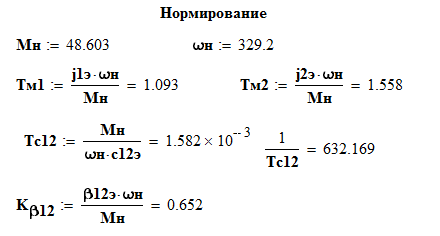
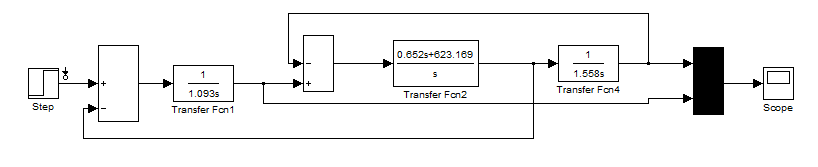
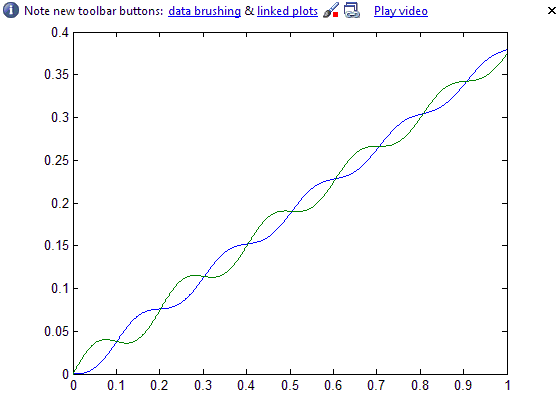
График зависимости 1(t)
ЛАЧХ и ЛФЧХ для 1(t)

АФЧХ для 1(t)
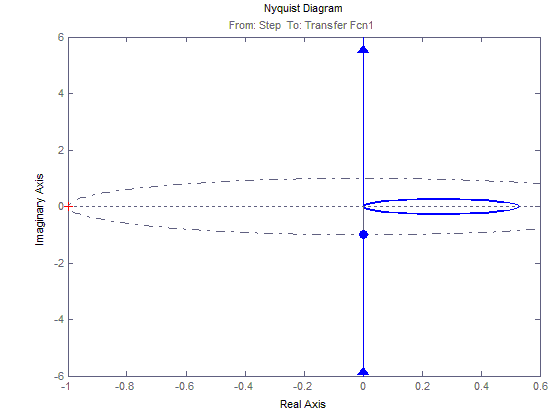
График зависимости 2(t)
ЛАЧХ и ЛФЧХ для 2(t)
АФЧХ для 2(t)
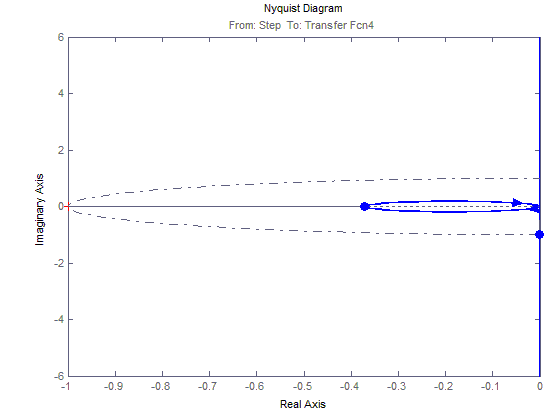
График зависимости М12(t)
ЛАЧХ и ЛФЧХ для М12(t)
АФЧХ для М12(t)
Осуществить варьирование параметров двухмассовой механической системы и выявить их влияние на частотные и временные характеристики объекта моделирования, параметры МЧ ЭП изменить в пределах (1…3) J2
1)1.5J2
2)3J2
и (0,5…1,5) С12
3)0.5C12
4)1.5C12
