

4.3 Порядок выполнения работы
4.3.1 Написать S – функцию алгоритма шаговой экстремальной системы управления согласно варианту таблицы № 1.
Таблица №1
|
№ варианта |
Нелинейная функция ОУ |
Границы изменения входного параметра ОУ |
Шаг поиска |
Структура ОУ |
Постоянная времени ОУ |
Чистая задержка ОУ |
|
1 |
Y = 10- (x-3)(x-3) |
[0;10] |
.1 |
ЛН |
10 |
5 |
|
2 |
Y = 15- (x-4)(x-4) |
[-4;8] |
.5 |
НЛ |
15 |
3 |
|
3 |
Y = 20- (x-5)(x-5) |
[0;11] |
.4 |
ЛН |
20 |
4 |
|
4 |
Y = -(x-6) (x-6) |
[0;9] |
.6 |
НЛ |
25 |
10 |
|
5 |
Y = 30-(x+3)(x+3) |
[-7;3] |
.3 |
ЛН |
30 |
12 |
|
6 |
Y = 40-(x+4)(x+4) |
[-9;3] |
.2 |
НЛ |
13 |
11 |
|
7 |
Y = 35- (x-7)(x-7) |
[0;12] |
.4 |
ЛН |
14 |
8 |
|
8 |
Y = 45- (x-12)(x-12) |
[5;20] |
.2 |
НЛ |
16 |
3 |
|
9 |
Y = 12- (x-2)(x-2) |
[0;7] |
.1 |
ЛН |
19 |
7 |
|
10 |
Y = 6- (x-3)(x-3) |
[0;8] |
.5 |
НЛ |
4 |
2 |
|
11 |
Y = 11- (x-7)(x-7) |
[1;17] |
.3 |
ЛН |
43 |
20 |
|
12 |
Y = -(x-5) (x-5) |
[2;13] |
.2 |
НЛ |
24 |
14 |
|
13 |
Y = 3-(x+6)(x+6) |
[-12;3] |
.7 |
ЛН |
35 |
15 |
|
14 |
Y = 36-(x+2)(x+2) |
[-6;3] |
.1 |
НЛ |
17 |
9 |
|
15 |
Y = 14- (x-4)(x-4) |
[0;9] |
.15 |
ЛН |
26 |
12 |
|
16 |
Y = 18- (x-3)(x-3) |
[0;7] |
.35 |
НЛ |
21 |
4 |
4.3.2 Собрать схему ШСЭР с заданной структурой объекта.
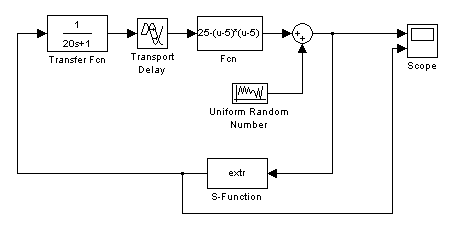
Рис. 15 Схема шаговой экстремальной системы управления с объектом типа ЛН
4.3.3 Промоделировать ШСЭР:
а) без помехи;
б) с помехой измерения, лежащей в диапазоне [-1.5; 1.5] (блок Uniform Random Number на рис. 15).
4.3.4 Снять переходные процессы выхода объекта управления и график изменения входного сигнала.
4.3.5 Сделать письменные выводы по работе
4.4 Контрольные вопросы и понятия
4.4.1 Динамическая модель экстремального объекта, особенности ее построения.
4.4.2 Виды СЭР. Их достоинства и недостатки.
4.4.3 Влияние помех на функционирование СЭР. Методы их устранения.
4.4.4 Понятие S – функции.
4.4.5 Особенности программирования S – функции.
Список литературы
Лазарев, Ю. Моделирование процессов и систем в MATLAB. [Текст]: учебный курс/ Ю. Лазарев. - Спб.: Питер; Киев: Издательская группа BHV, 2005. - 512 с.: ил.; 23 см.; 3000 экз. – ISBN 5-469-00600-Х.
Осовский, С. Нейронные сети для обработки информации [Текст]: учебник/ С. Осовский; - пер. с польского И.Д. Рудинского. – М.: Финансы и статистика, 2002. – 344 с.: ил.; 24 см. – Библиогр.: с. 330-339. – 3000 экз. – ISBN 5-279-02567-4.
Сигеру, О. Нейроуправление и его приложения. Кн. 2. [Текст]: учебник/ О. Сигеру; - под ред. А.И. Галушкина, В.А. Птичкина. – М.: ИПРЖР, 2000. – 272 с.: ил.; 21 см. – Библиогр.: с. 249-264. – 3000 экз. – ISBN 5-93108-006-6.
Терехов, В.А. Нейросетевые системы управления [Текст]: учеб. пособие для вузов/ В.А. Терехов, Д.В. Ефимов, И.Ю. Тюкин. – М.: Высш. шк., 2002. – 183 с.: ил.; 22 см. – Библиогр.: с. 177-180. – 5000 экз. – ISBN 5-06-004094-1.
Учебное издание