1. Разработайте подпрограмму ввода данных с АЦП (выберите принцип действия АЦП) для ОМЭВ МК51 (обмен по прерыванию). Покажите место данной подпрограммы в общей структуре программного обеспечения и ее взаимодействие с другими программными модулями.
Аналого-цифровой преобразователь[1][2][3] (АЦП, англ.Analog-to-digital converter, ADC) — устройство, преобразующее входной аналоговый сигналв дискретный код (цифровой сигнал). Обратное преобразование осуществляется при помощи ЦАП (цифро-аналогового преобразователя, DAC).
Как правило, АЦП — электронноеустройство, преобразующеенапряжениев двоичный цифровой код. Тем не менее, некоторые неэлектронные устройства с цифровым выходом, следует также относить к АЦП, например, некоторые типыпреобразователей угол-код. Простейшим одноразрядным двоичным АЦП являетсякомпаратор.
Разрядность АЦП характеризует количество дискретных значений, которые преобразователь может выдать на выходе. В двоичных АЦП измеряется в битахНапример, двоичный 8-ми разрядный АЦП, способен выдать 256 дискретных значений (0…255).
Разрешение по напряжению равно разности напряжений, соответствующих максимальному и минимальному выходному коду, делённой на количество выходных дискретных значений. Например:
Пример
Диапазон входных значений = от −10 до +10 вольт
Разрядность двоичного АЦП 14 бит: 214 = 16384 уровней квантования
Разрешение двоичного АЦП по напряжению: (10-(-10))/16384 = 20/16384 = 0,00122 вольт = 1,22 мВ
АЦП последовательного приближения
Преобразователь этого типа, называемый в литературе также АЦП с поразрядным уравновешиванием, является наиболее распространенным вариантом последовательных АЦП.
В основе работы этого класса преобразователей лежит принцип дихотомии, т.е последовательного сравнения измеряемой величины с 1/2, 1/4, 1/8 и т.д. от возможного максимального значения ее. Это позволяет для N-разрядного АЦП последовательного приближения выполнить весь процесс преобразования за N последовательных шагов (итераций) вместо 2N-1 при использовании последовательного счета и получить существенный выигрыш в быстродействии. Так, уже при N=10 этот выигрыш достигает 100 раз и позволяет получить с помощью таких АЦП до 105...106 преобразований в секунду. В то же время статическая погрешность этого типа преобразователей, определяемая в основном используемым в нем ЦАП, может быть очень малой, что позволяет реализовать разрешающую способность до 18 двоичных разрядов при частоте выборок до 200 кГц (например, DSP101 фирмы Burr-Brown).
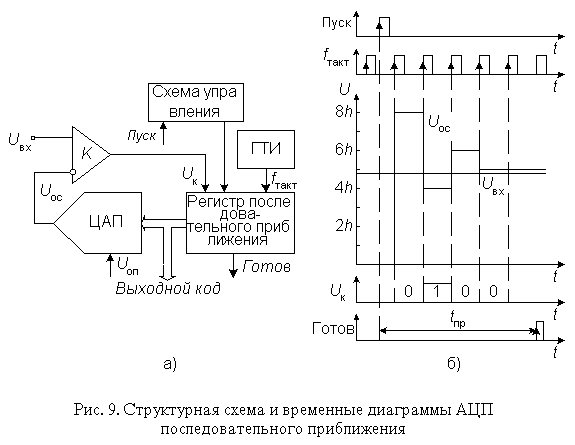
Рассмотрим принципы построения и работы АЦП последовательного приближения на примере классической структуры (рис. 9а) 4-разрядного преобразователя, состоящего из трех основных узлов: компаратора, регистра последовательного приближения (РПП) и ЦАП.
После подачи команды "Пуск" с приходом первого тактового импульса РПП принудительно задает на вход ЦАП код, равный половине его шкалы (для 4-разрядного ЦАП это 10002=810). Благодаря этому напряжение Uос на выходе ЦАП (рис. 9б)
Uос=23h.
где h - квант выходного напряжения ЦАП, соответствующий единице младшего разряда (ЕМР). Эта величина составляет половину возможного диапазона преобразуемых сигналов. Если входное напряжение больше, чем эта величина, то на выходе компаратора устанавливается 1, если меньше, то 0. В этом последнем случае схема управления должна переключить старший разряд d3 обратно в состояние нуля. Непосредственно вслед за этим остаток
Uвх - d3 23 h
таким же образом сравнивается с ближайшим младшим разрядом и т.д. После четырех подобных выравнивающих шагов в регистре последовательного приближения оказывается двоичное число, из которого после цифро-аналогового преобразования получается напряжение, соответствующее Uвх с точностью до 1 ЕМР. Выходное число может быть считано с РПП в виде параллельного двоичного кода по N линиям. Кроме того, в процессе преобразования на выходе компаратора, как это видно из рис. 9б, формируется выходное число в виде последовательного кода старшими разрядами вперед.
Быстродействие АЦП данного типа определяется суммой времени установления tуст ЦАП до установившегося значения с погрешностью, не превышающей 0,5 ЕМР, времени переключения компаратора tк и задержки распространения сигнала в регистре последовательного приближения tз. Сумма tк + tз является величиной постоянной, а tуст уменьшается с уменьшением веса разряда. Следовательно для определения младших разрядов может быть использована более высокая тактовая частота. При поразрядной вариации fтакт возможно уменьшение времени преобразования tпр на 40%. Для этого в состав АЦП может быть включен контроллер.
При работе без устройства выборки-хранения апертурное время равно времени между началом и фактическим окончанием преобразования, которое так же, как и у АЦП последовательного счета, по сути зависит от входного сигнала, т.е. является переменным. Возникающие при этом апертурные погрешности носят также нелинейный характер. Поэтому для эффективного использования АЦП последовательного приближения, между его входом и источником преобразуемого сигнала следует включать УВХ. Большинство выпускаемых в настоящее время ИМС АЦП последовательного приближения (например, 12-разрядный МАХ191, 16-разрядный AD7882 и др.), имеет встроенные устройства выборки-хранения или, чаще, устройства слежения-хранения (track-hold), управляемые сигналом запуска АЦП. Устройство слежения-хранения отличается тем, что постоянно находится в режиме выборки, переходя в режим хранения только на время преобразования сигнала.
Данный класс АЦП занимает промежуточное положение по быстродействию, стоимости и разрешающей способности между последовательно-параллельными и интегрирующими АЦП и находит широкое применение в системах управления, контроля и цифровой обработки сигналов.
Обмен по прерыванию.
Достоинства: сокращаются затраты машинного времени на обмен с медленно действующими ВУ, из-за отсутствия повторения цикла опроса.
Недостаток: требуются дополнительные аппаратные затраты необходим контроллер прерываний.
Можно выделить 5 основных этапов механизма прерывания:
1) Фиксация прерывания. Предполагается, что ЭВМ сигнал от внешнего устройства может принимать, а может не принимать. Фиксация нужна для того, чтобы не потерять информацию от ВУ. Существуют процессы, запрещающие их прерывание. Процесс запроса прерывания это программно-аппаратная функция.
2) Анализ прерывания. Так как в ЭВМ может существовать несколько устройств, требующих обмена с прерыванием, то может поступить несколько запросов прерывания одновременно. Поэтому каждому типу прерываний присваивается определенный приоритет.
3) Фиксация состояния процессора. Для фиксации состояния процессора необходимо зафиксировать состояния: Счетчика адреса, аккумулятора и указателя стека.
Для полного сохранения необходимо еще сохранить состояние регистров.
Эта операция выполняется аппаратным путем.
4) Выполнение программы обслуживающей прерывание. Для каждого уровня прерывания назначен некоторый адрес в адресной части памяти, который будет содержать адрес подпрограммы обработки прерывания. Этот адрес называется адрес-вектор.
5) Восстановление прерванного процесса. Необходимо восстановить состояние регистров, указателя стека, аккумулятора и счетчика адреса.
Программа обслуживания прерываний находится вне тела основной процедуры.
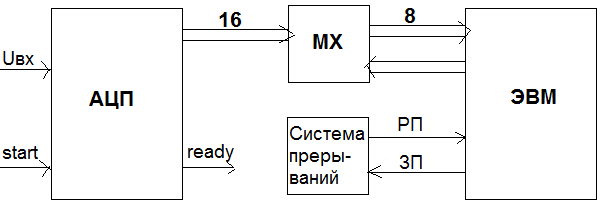
Действия при реализации ввода с АЦП:
1) Запуск ацп
2) ожидание прерывания от ацп
3) получение запроса на прерывание Ready
4) обмен по прерыванию, описанный выше, включает также чтение с выходного регистра ацп в порт, считывание с порта в аккумулятор.
2. Разработайте подпрограмму анализа аварийных ситуаций робота-манипулятора с тремя степенями свободы (в реальном масштабе времени) для МК51.
На
роботе-манипуляторе с тремя степенями
свободы имеется три реверсивных
двигателя. Управляющие воздействия для
перемещения манипулятора формируются
микроконтроллером. Для управления
необходимо шесть управляющих воздействий
– по два на каждую степень свободы.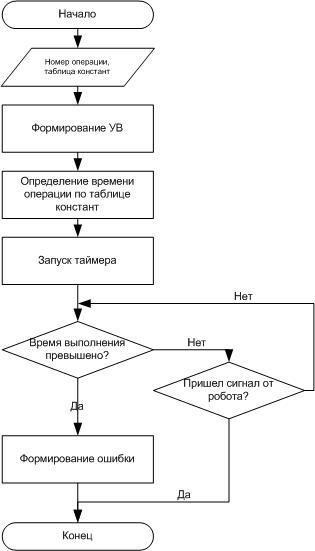
Список переменных:
Количество импульсов
-Номер текущей операции
Для каждой операции предусмотрено свое время выполнения. Данные по времени на каждую операцию хранятся в таблице Номер операции – Время выполнения. Время выполнения текущей операции отсчитывается таймером. Авария робота возникает в случае, если превышено время отклика сигнала с текущего двигателя.
Программасы кирәк түгел.
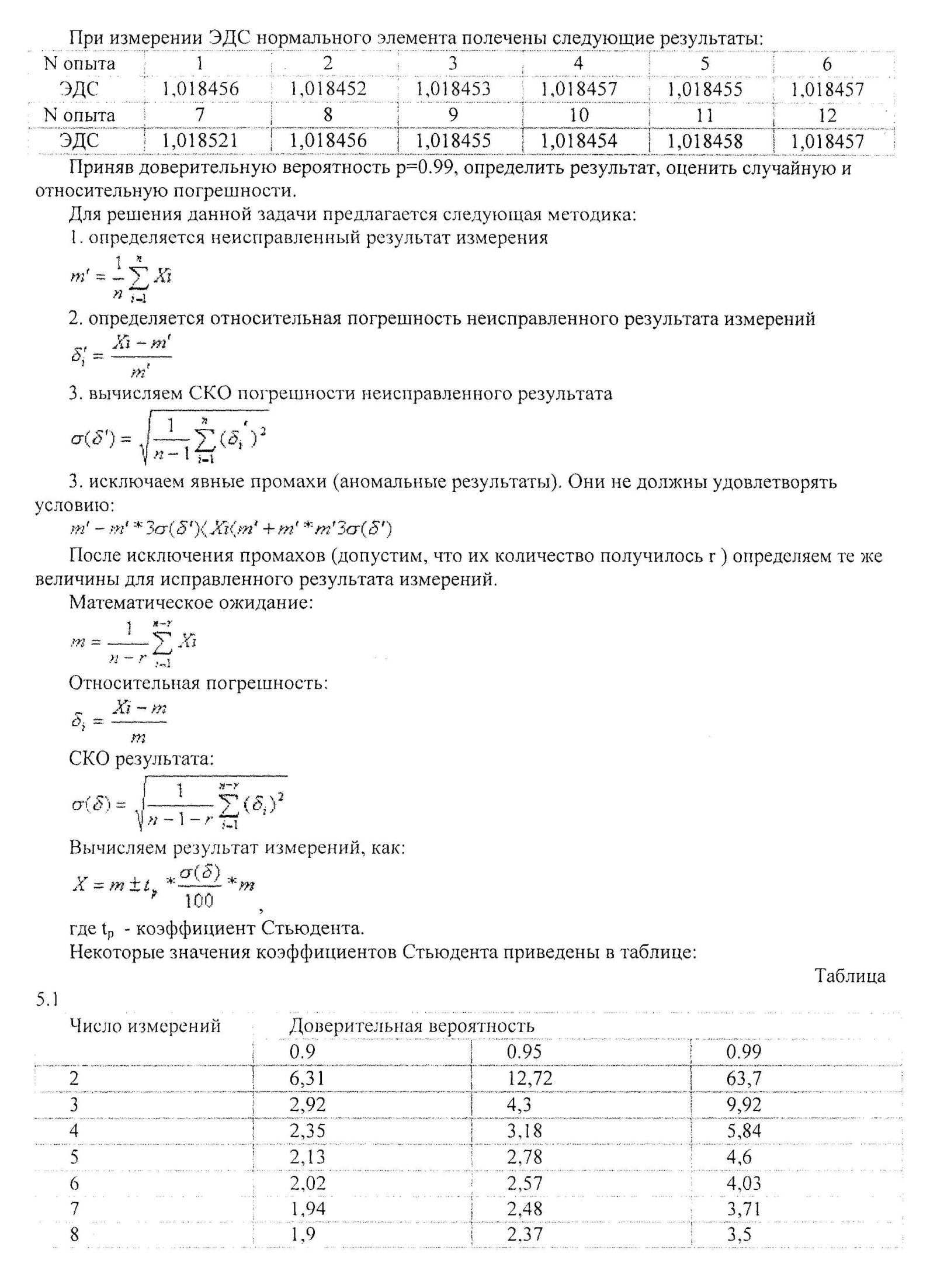
3. Разработайте фрагмент функциональной, схемы МПСУ на базе ОЭВМ ввода данных с аналогового датчика, например с термопары, алгоритм процесса измерения температуры и подпрограмму коррекции случайной составляющей погрешности результатов измерения (допустимая погрешность - 0,2 %).(җавабы ошап бетми)
4. Разработайте структурную схему усо автоматической системы управления роботом -манипулятором с гидроприводом.
Исполнительные устройства – электромагниты постоянного тока (24В). Выбираем цифровые датчики. Следовательно, используется цифровая подсистема ввода и цифровая подсистема вывода.
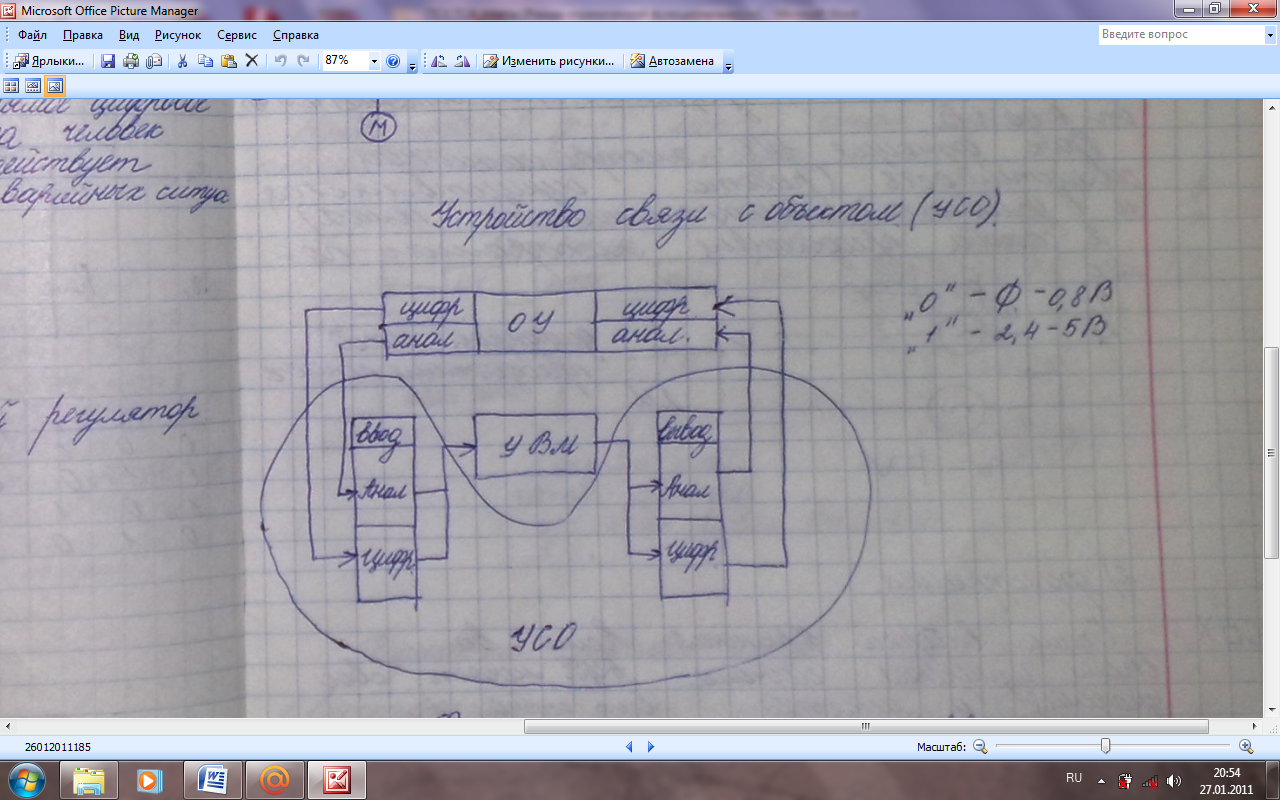


УСО предназначено для связи систем управления с электроавтоматикой объекта, физическими величинами и т.д.
Объект описывается физическими характеристиками. Объект должен иметь ДОС для преобразования физических величин в унифицированные электрические сигналы. Датчики подразделяются на аналоговые и цифровые.
Аналоговые:
1) генераторные (термопара);
2) параметрические (терморезистор);
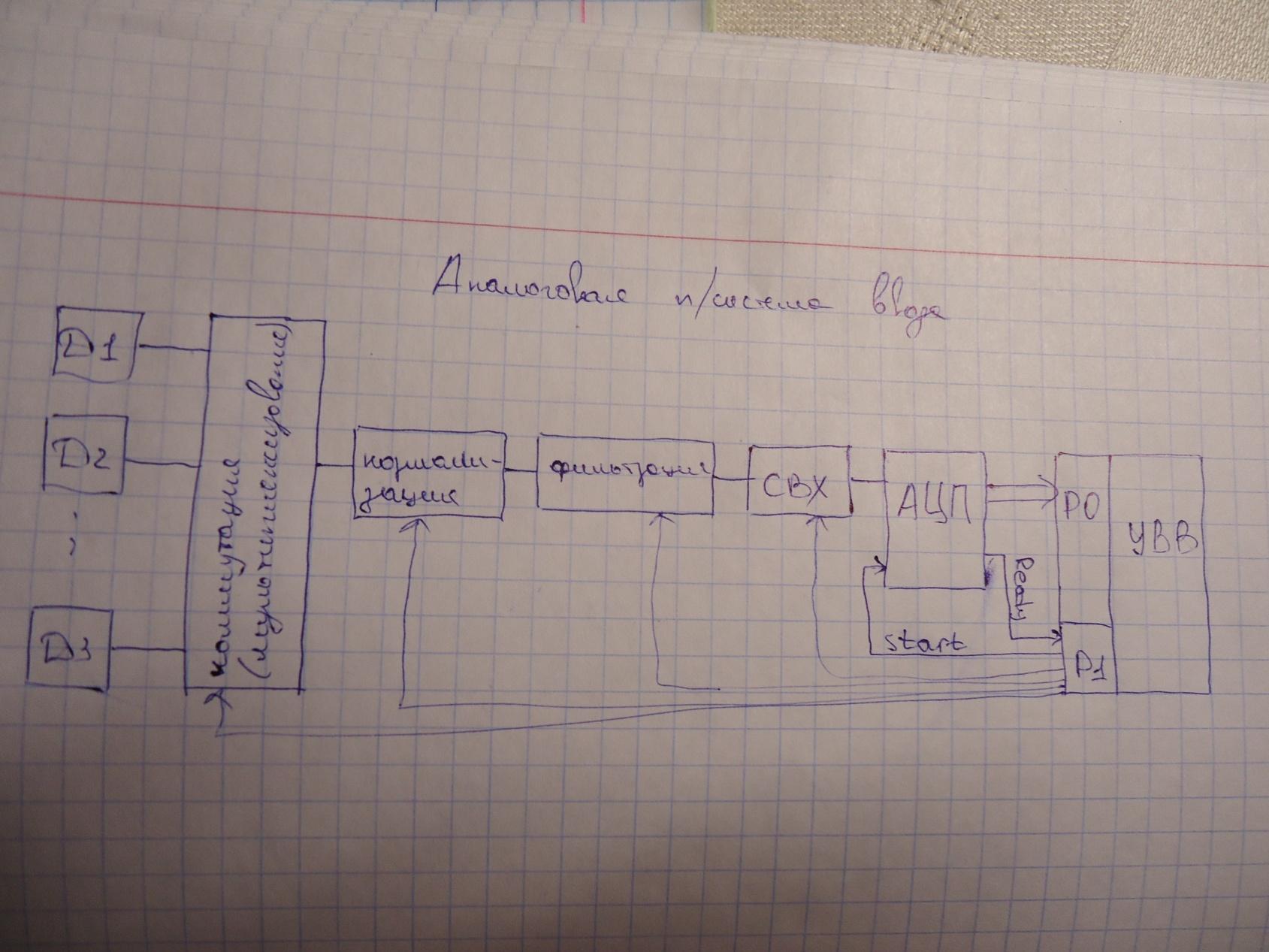
Цифровые датчики выдают коды электрических сигналов. Цифровыми называют часто бинарные датчики - выдают два сигнала (есть, нет). Выходное напряжение бинарного датчика должно быть 12 В или 24 В. Пример бинарного датчика: геркон. Аналоговая цифровая системы ввода УСО предназначены для преобразования аналоговых и цифровых физических величин, напряжений и токов, и их характеристик, форму, приемлемую для использования в ЭВМ. Форма, пригодная для использования в ЭВМ - это сигналы ТТЛ логики. Подсистема аналогового ввода осуществляет преобразование аналоговых напряжений и токов в цифровой код. Функции, выполняемые подсистемой аналогового ввода:
1) нормирование - усиление или ослабление сигналов усиление фильтрация - ограничение спектра преобразуемого сигнала смещение уровня преобразование тока в напряжение
2) коммутация сигналов, т.е. мультиплексирование аналоговых сигналов
3) аналого-цифровое преобразование
Подсистема аналогового вывода.
Существует три конфигурации:
1) с ЦАП в каждом выходном канале
2) с одним ЦАП, работающем в режиме разделения во времени и
с выходным запоминающим усилителем в каждом выходном канале.
3) комбинированный.
Первый вариант обладает высоким быстродействием и высокой ценой. Второй вариант обладает низкой ценой и низким быстродействием.
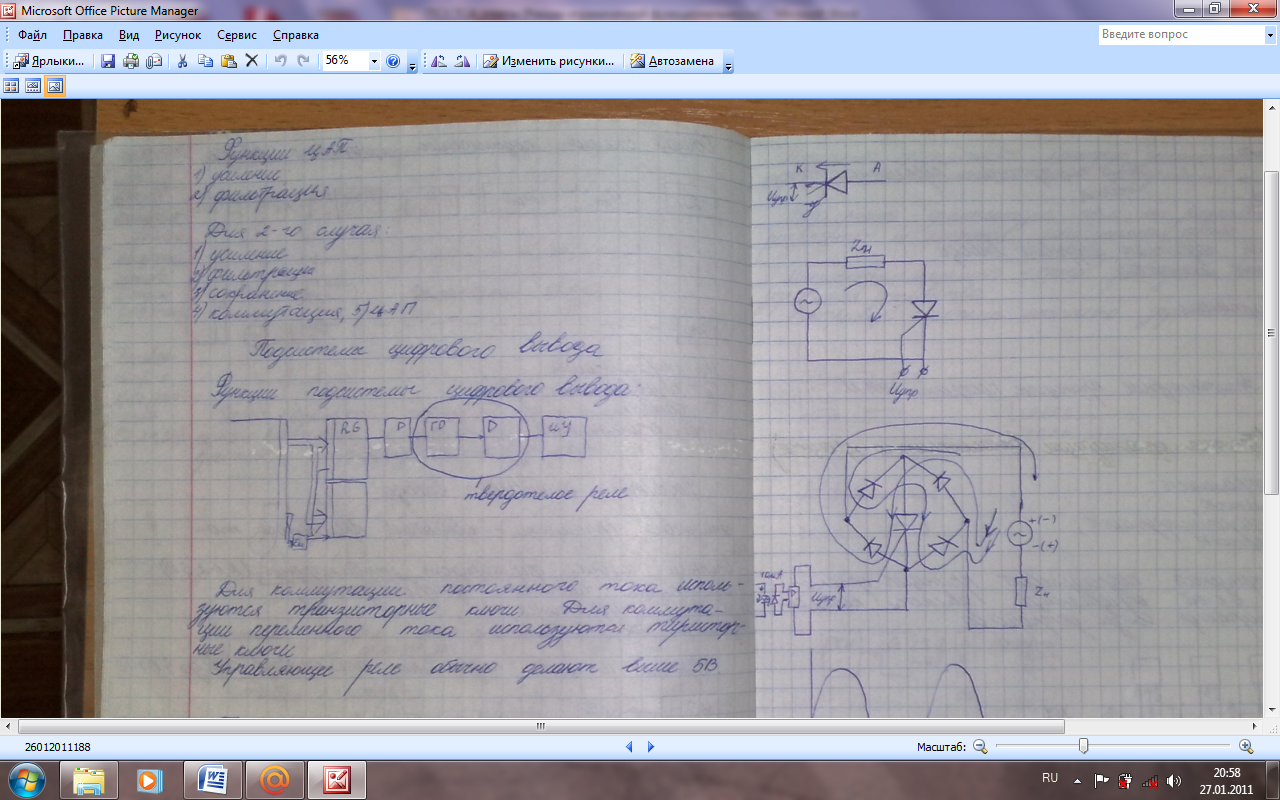
Подсистема цифрового ввода осуществляет:
1) ввод дискретных сигналов
2) подсчет повторяющихся сигналов.
Устройства: счетчики, регистры, блоки согласования.
Подсистема цифрового вывода осуществляет:
1) выработка цифровых (бинарных) управляющих сигналов для управления коммутирующими элементами (ключи, контакторы). Стандартное напряжение в коммутирующих цепях 110,220 В.
В цифровых подсистемах ввода и вывода применяются элементы гальванической развязки. Гальваническая развязка нужна для отделения силовых и управляющих цепей.
Гальваническая развязка — передача энергии или сигнала между электрическими цепями без электрического контакта между ними. Гальванические развязки используются для передачи сигналов, длябесконтактногоуправления и для защиты оборудования и людей от поражения электрическим током.
Без использования развязки предельный ток, протекающий между цепями, ограничен только электрическими сопротивлениями, которые обычно относительно малы. В результате возможно протекание выравнивающих токови других токов, способных повреждать компоненты цепи или поражать людей, прикасающихся к оборудованию, имеющему электрический контакт с цепью. Прибор, обеспечивающий развязку, искусственно ограничивает передачу энергии из одной цепи в другую. В качестве такого прибора может использоватьсятрансформаторилиоптрон. В обоих случаях цепи оказываются электрически разделёнными, но между ними возможна передача энергии или сигналов.
под нормализацией понимается процесс выравнивания сигнала относительно какого-либо эталона.
Стабилизатор напряжения — преобразователь электрической энергии, позволяющий получить на выходенапряжение, находящееся в заданных пределах при значительно больших колебаниях входного напряжения и сопротивлениянагрузки.
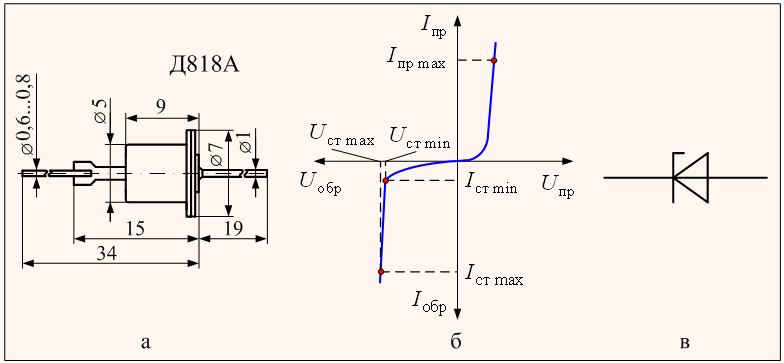
Полупроводнико́вый стабилитро́н, или диод Зенера— плоскостнойкремниевыйполупроводниковый диод, работающий при обратном смещении в режимепробоя[1]. До наступления пробоя через стабилитрон протекают незначительные токиутечки, а егосопротивлениевесьма высоко[1]. При наступлении пробоя ток через стабилитрон резко возрастает, а его дифференциальное сопротивлениепадает до величины, составляющей для различных приборов от долей Ома до сотен Ом[1]. Поэтому в режиме пробоя напряжение на стабилитроне поддерживается с заданной точностью в широком диапазоне обратных токов[2].
Основное назначение стабилитронов — стабилизация напряжения