

13оппс5-сфа
.pdf5. 5. СТРУКТУРНО-ФУНКЦИОНАЛЬНЫЙ АНАЛИЗ МИКРОПРОЦЕССОРНЫХ ПРИБОРОВ
Напомним, что в данном курсе лекций под прибором понимается конструктивно законченное изделие с небольшим количеством функций измерения, контроля и (или) управления предназначенное для повышения эффективности работы оператора. Прибор − это всегда «закрытое для пользователя» изделие,
которое создается в результате опытно-конструкторской разработки (ОКР).
Техническое задание (ТЗ) на проектирование прибора подготавливается на основе технических требований заказчика, а также на основе результатов научных или маркетинговых исследований.
Многие десятилетия приборы проектировались только как «железо», алгоритм функционирования которого определялся составом структурных составляющих и их связей. При этом связи были «жестко ориентированы» на конкретные структурные составляющие. Особенностью таких приборов являлось то, что если в процессе их промышленного производства возникала необходимость модернизации, то требовалась доработка документации не только на изготовление самого прибора, но и на технологию его производства. Такие работы связаны со значительными затратами труда, времени и материальных ресурсов и поэтому принятие решения о модернизации какого-то прибора всегда было непростым.
Новое направление в приборостроении в последние годы связано с проектированием приборов в виде совокупности технических и программных средств, т.е. в виде «железа», работа которого управляется программно. В таких приборах проблема их модернизации, например, - с целью расширения функциональных возможностей, во многих случаях решается не переработкой конструкторской документации на «железо» и технологию его производства, а доработкой программных средств прибора. Причем эти возможности тем шире, чем больше «железо» будет подстроено под программное управление.
Проектирование приборов в виде совокупности программных и технических средств в настоящее время является стандартом «де-факто», действенность которого основывается на больших успехах электроники в области создания микропроцессорных компонентов. Причем по мере развития микропроцессорных компонентов и других элементов микроэлектроники прослеживается тенденция реализации возможно большего количества функций прибора программными средствами.
Прибор, спроектированный на основе новой − микропроцессорной технологии, далее будем называть прибором микропроцессорным (ПМ). Изучение принципов проектирования ПМ является одной из целей данного курса лекций.
В этой лекции рассмотрим обобщенную структурную схему ПМ и проведем ее структурно-функциональный анализ.
2
5.1. Основные положения структурной организации микропроцессорного прибора
5.1.1. Обобщенная структурная схема ПМ.
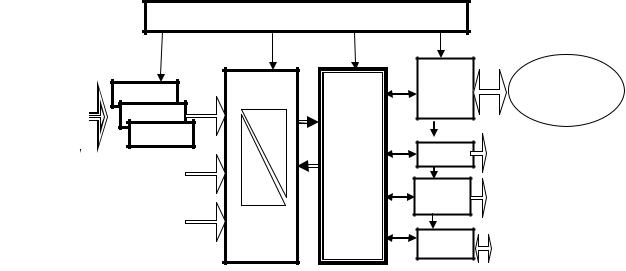
Обобщенная структурная схема ПМ представлена на рис. 5.1.
БП
|
ПИП |
БОИС |
БИО |
Типы |
|
||
|
|
||
физических |
ПИП |
|
|
сигналов |
|
|
|
ПИП |
|
БМК |
|
|
|
||
Сигналы электрического типа, |
|
БСА |
|
|
|
||
аналоговые |
|
|
|
|
|
|
БСД |
Сигналы электрического типа, |
|
|
|
дискретные |
|
|
|
|
|
|
БПД |
Оператор
Сигналы выходные электрического типа, аналоговые Сигналы выходные
электрического типа, дискретные
Сигналы передачи данных
Рис.5.1. Обобщенная структура ПМ
На схеме приняты следующие обозначения структурных составляющих
(СС) ПМ:
БМК - блок микроконтроллерного управления работой прибора;БОИС - блок обработки измерительных сигналов;ПИП - первичные измерительные преобразователи ФВ;БИО - блок интерфейса оператора;
БСА - блок вывода аналогового сигнала во внешние устройства;БСД - блок вывода дискретных сигналов во внешние устройства;БПД - блок передачи данных;БП - блок питания.
Функциональное назначение структурных составляющих (СС) ПМ состоит
вследующем.
1)БМК является основой ПМ. Это означает, что проектирование ПМ всегда начинается с выбора решения: какие функции должны решаться на уровне БМК и какие средства (СС по рис.5.1), необходимо подключить к БМК для реализации всех требуемых функций ПМ.
Во многих современных приборах такой выбор часто осуществляется в пользу реализации максимально возможного количества функций программными средствами БМК. При этом количество составных частей «железа» (СС, подключаемых к БМК) стремятся предельно минимизировать.
2)Блок БОИС предназначен для решения задач ввода электрических сигналов в ПМ, для обработки введенных аналоговых сигналов и представления результатов обработки в форме, наиболее удобной для взаимодействия с БМК.

3
Для реализации своего назначения БОИС в общем случае должен выполнять следующие функции обработки аналоговых сигналов:
защиты от «разрушительного воздействия» недопустимого уровня входных электрических сигналов или от нарушения полярности их подключения (в том числе так называемая «защита от дурака»). Два треугольника, изображенные в БОИС на рис.5.1, обозначают важную защитную функцию блока – осуществление гальванического разделения входных цепей с цепями микропроцессорной части прибора;
коммутации входных измерительных сигналов;
масштабирования измерительного сигнала (усиление или ослабление);
фильтрации измерительного сигнала от частотных помех;
преобразования измерительного сигнала к виду, удобному для выполнения аналого-цифрового преобразования и обеспечение его ввода в БМК;
специальных функций обработки сигнала, определяемых особенностью работы ПИП конкретного назначения. Такие функции там, где это возможно, стремятся выполнить на уровне программных средств.
3) ПИП осуществляют первичное измерительное преобразование сигнала какого-то типа, характеризующего значение ФВ, в сигнал электрического типа, который далее воспринимается БОИС, обрабатывается и передается в БМК.
а) сборочная единица |
б) комплекс |
|
Рис.5.2. Конструктивные исполнения приборов
На рис.5.2. показаны два прибора с ПИП. В приборе, который производится предприятием как сборочная единица, ПИП конструктивно располагается в корпусе ПМ (см., верхнюю часть ПМ на рис. 5.2а). В приборе, который производится предприятием в виде комплекса, ПИП конструктивно реализуется в виде выносной структурной составляющей, подсоединяемой к корпусу
4
прибора кабелем связи, входящем в комплект поставки прибора (см. рис. 5.2б). Выносное исполнение ПИП по рис.5.2б позволяет осуществлять его монтаж удаленно, размещая его в том месте, где необходимо осуществлять «отбор ФВ» (в пределах длины «штатного» соединительного кабеля).
4)БИО реализует интерфейс взаимодействия оператора с прибором; от его проектного решения во многом зависит достижение основного назначения прибора − повышение эффективности работы оператора.
В простейшем случае функции БИО ограничиваются выводом оператору только показаний прибора в цифровой форме: наименование ФВ, ее размерность и текущий результат измерения.
В общем же случае БИО может обеспечивать интерактивное взаимодействие оператора с прибором, позволяющее выполнять настройку нужного режима работы прибора, параметров работы прибора в выбранном режиме, осуществлять чтение из архивной памяти прибора результатов измерений и представлять их оператору в удобной для анализа форме.
5)Блок БСА предназначен для передачи выходных аналоговых сигналов из прибора в удаленное внешнее устройство.
БСА может формировать выходные аналоговые сигналы в виде частоты импульсов или гармонических колебаний, в виде прямоугольных импульсов переменной длительности (широтная импульсная модуляция). Но чаще всего выходной аналоговый сигнал ПМ формируется в виде напряжения или силы постоянного тока.
Выходные аналоговые сигналы ПМ нормируются. В приборах различного назначения чаще всего применяются сигналы напряжения постоянного тока, унифицированные в диапазонах 0…10В, +10В, и токовые сигналы, унифицированные в диапазонах 0…5мА, 0…20мА, 4…20мА; выходной сигнал может быть представлен частотой следования импульсов или гармонических колебаний.
6)Блок БСД предназначен для передачи внешним устройствам дискретных сигналов сигнализации (типа: замкнуто-разомкнуто) или двухпозиционного управления (типа: открыть-закрыть, увеличить-стоп, уменьшить-стоп и т.п).. БСД может формировать выходные сигналы в виде единичных импульсов фиксированной длительности или в виде ступенчатого воздействия.
7)Блок БПД предназначен для поддержания взаимодействия прибора с внешним программным устройством, например,– с удаленным компьютером (ЭВМ), путем бит-последовательного приема-передачи цифрового сигнала.
Такое взаимодействие прибора необходимо с одной стороны – для передачи из ПМ в ЭВМ данных текущих результатов измерений, архивной и служебной информации, а с другой – для записи из ЭВМ в ПМ служебной информации, для синхронизации запуска в ПМ измерительных или управляющих операций при его работе в составе системы.
Наличие в приборе БПД отвечает требованиям обеспечения возможности использования прибора в составе информационных сетей.
8)БП в приборе, как и в любом изделии, играет важнейшую роль, т.к. нормальное функционирование всех СС прибора возможно только при отсутствии проблем с их электропитанием.
5
5.2. Блок микроконтроллерного управления
Требования к блоку микроконтроллерного управления БМК (далее его будем также называть – блоком микроконтроллера) определяются составом функций ПМ конкретного назначения, необходимой точностью вычислений результатов измерений и их обработки, необходимым быстродействием (количеством операций в секунду), ограничениями электропотребления и габаритов.
5.2.1. Микроконтроллер – основа БМК.
Под микроконтроллером (МК) понимается микросхема высокого уровня интеграции, которая включает в себя структурные составляющие:
микропроцессор − интегральная микросхема, предназначенная для выполнения вычислительных операций;
запоминающие устройства различных типов;
периферия, обеспечивающая ввод-вывод электрических сигналов.
По сути, МК – это однокристальный компьютер. Ранее он так и назывался − микро-ЭВМ. Использование одной микросхемы МК вместо функционального набора микросхем: процессора, памяти различных типов и периферии вводавывода сигналов значительно уменьшает габаритные размеры БМК, снижает трудоемкость его реализации, уменьшает электропотребление и таким образом снижает общую стоимость прибора.
5.2.1.1. Выбор МК для применения в проекте ПМ конкретного назначения осуществляется на основе следующих характеристик:
тактовая частота;
разрядность шин;
состав и количество каналов ввода-вывода;
энергопотребление;
геометрические размеры.
1) Под тактовой частотой МК понимается частота (МГц) задающего генератора, стабилизированная с помощью кварцевого элемента.
Кварцевый элемент и дополняющие его генераторные элементы являются внешними устройствами МК и подключаются к его тактирующим входам.
Чем выше частота тактового генератора, тем меньше время, которое МК затрачивает на выполнение одного такта операций вычисления, обращения к памяти и управления вводом-выводом. Тем выше быстродействие ПМ.
2)Под разрядностью МК понимается число одновременно обрабатываемых двоичных разрядов: 4,8,16,32,64. Понятно, что процессоры с большей разрядностью имеют большую вычислительную способность. Но каждому ПМ нужен свой вычислительный уровень.Здесь не так, что: «чем больше, тем лучше».
3)Характеристики каналов ввода-вывода определяются составом и коли-
чеством принимаемых входных и формируемых выходных сигналов. Состав сигналов определяет каналы:
ввода аналоговых сигналов,
вывода аналоговых сигналов,
ввода дискретных сигналов,
6
вывода дискретных сигналов,
бит-последовательной передачи цифрового сигнала.
Количество каналов определяет потенциальное количество функций вво- да-вывода, которые может поддерживать МК.
4)Энергопотребление определяет экономичность создаваемого прибора и формирует требования к организации его питания. Энергоснабжение должно анализироваться для различных режимов работы МК: для рабочего режима, для ждущего режима, для режима «сна». Понятно, что чем меньше ПМ потребляет электроэнергии при сохранении предъявляемых к нему технических требований, тем лучше: тем больше возможности для его питания от источника автономного питания, тем меньше он выделяет тепла и поэтому не требует теплоотвода.
В настоящее время на рынках микроэлектроники имеется огромное разнообразие типов МК. В данной лекции из всего этого разнообразия рассмотрим характеристики МК семейства MSP430, которое, обладая высокими техническими характеристиками, отличается низким энергопотреблением. Низкое энергопотребление делает MSP430 весьма перспективным для применения в приборах разного назначения: в счётчиках количества тепловой энергии, в счетчиках
ирасходомерах газа и жидкости, в измерителях и регуляторах различных физических величин, в портативных медицинских приборах и т.д.
5)Внешний вид одного из микроконтроллеров семейства MSP430 представлен ниже, практически в натуральную величину:
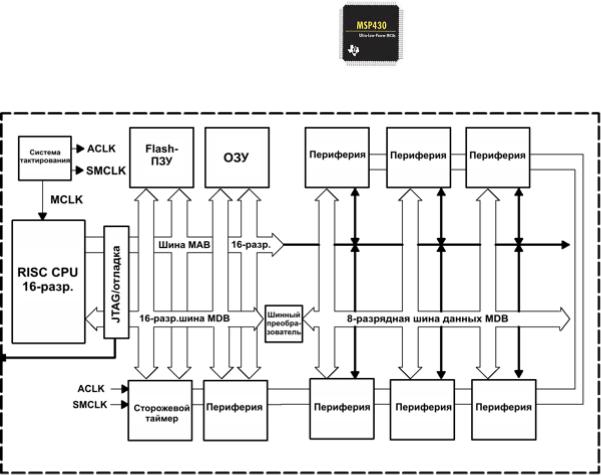
5.2.1.2. Схема структурная МК типа MSP430, представлена на рис.5.3.
Рис. 5.3. Структурная схема микроконтроллера MSP430
7
Основой МК семейства является процессор RISC-CPU 16-разрядный со структурой связей, определяемой как RISC-архитектура: Reduced Instruction Set Computer. Отличительная особенность RISC-CPU состоит в том, что процессор обращается к памяти различного вида и к периферийным устройствам процессорной командой, которая выполняется в течение одного такта, в то время как в МК других типов такие обращения выполняются за несколько процессорных тактов подготовительных и одного исполнительного.
По этой причине – «уменьшенное количество операций» (Reduced Instruction Set)
Однотактное исполнение команд CPU обеспечивается тем, что RISC-CPU поддерживает единое адресное пространство с возможностью непосредственного обращения через общую адресную шину (MAB) и шину памяти данных (MDB) к Flash-ПЗУ (Постоянное Запоминающее Устройство), к оперативной памяти ОЗУ (RAM), к сторожевому таймеру и к периферийным модулям вводавывода.
Длительность такта RISC-CPU определяется кварцевой частотой генератора тактовой частоты, который находится в блоке «система тактирования».
Памяти Flash-ПЗУ и ОЗУ могут использоваться как для программного кода, реализующего алгоритмы работы прибора, так и для данных – для регистрации результатов контроля и измерения. Байты или слова таблиц данных могут сохраняться и использоваться непосредственно в Flash, что исключает необходимость копировать эти таблицы в ОЗУ перед дальнейшим использованием. Во Flash размещена таблица прерываний. Она занимает верхние 16 слов адресного пространства. Обращение к прерыванию позволяет немедленно инициировать выполнение программы, реализующий алгоритм действий по определенному событию.
Сторожевой таймер (WDT − WatchDog-timer)−предназначен для контроля штатного исполнения программ. Он срабатывает по фактам «зависания» программы и формирует программное прерывание, которое инициирует продолжение работы БМК. Сторожевой таймер, как правило, организуется в виде свободно бегущего таймера-счетчика, который сбрасывается через определенное время. В том случае, если происходит сбой исполнения программы, то счетчик своевременно не сбрасывается в нуль, происходит его переполнение, которое формирует аппаратный сброс микроконтроллера.
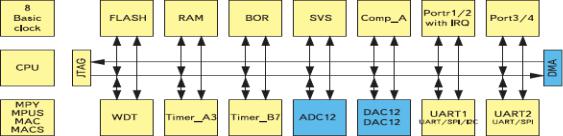
5.2.1.3. Схема функциональная МК типа MSP430 представлена на рис.5.4.
Рис. 5.4. Функциональная схема одного из МК из семейства MSP430
8
На функциональной схеме в дополнение к ранее рассмотренным видам памяти и сторожевому таймеру показаны периферийные модули: супервизор питания BOR; порты параллельной передачи сигналов (port); таймеры (А,В); аналоговый компаратор(Соmp-A); аналого-цифровой преобразователь (ADC); циф- ро-аналоговый преобразователь (DAC); порты последовательной передачи дан-
ных (UART).
1) BOR – супервизор питания предназначен для защиты МК от сбоев, которые возникают при коротких «пропаданиях» напряжения питания.
Например: после «сбоя» питания процессор и память могут с «разным временем» терять и восстанавливать свою работоспособность. Если процессор начнет работать раньше, то из памяти он будет считывать ложную информацию. А это приведет к «зависанию» программы.
2) Порты ввода-вывода (Port)− порты параллельного ввода и вывода дискретных сигналов. В MSP430 различного исполнения количество таких портов может быть от 1 до 6 (Р1,…,Р6). Каждый порт – это 8 дискретных каналов.
Каждый канал любого порта может индивидуально конфигурироваться:
на ввод или на вывод дискретного сигнала,
на соответствие состояния дискретного сигнала «логической 1» и логическому «нулю». Программно «высокий уровень» или «низкий уровень»; соответственно инверсно задается значение «логического 0». При этом «низкий уровень» может быть равен напряжению 0В, а «высокий уровень» может быть равен напряжению источника питания.
Каналы портов P1 и P2 способны работать как выводы внешних прерываний (IRQ). Это значит, что при появлении на входе какого-либо канала Р1 или Р2 сигнала логической «1» последуют два действия: будет остановлена работа исполняемой программы и запомнены все промежуточные результаты; будет инициировано обращение к определенной подпрограмме, предназначенной для обработки события, факт которого сигнализируется сигналом прерывания.
Как правило, событиями, вызывающими прерывание, могут быть:
наступление времени выполнения какого-то действия (например, - периодическая проверка работоспособности оборудования);
возникновение аварийного состояния среды (например, - аварийная загазованность помещения);
возникновение аварийного состояния оборудования (например,- аварийный останов насоса городского водоснабжения, срабатывание охранной сигнализации);
выход текущего значения контролируемой физической величины за заданные границы ее допустимого изменения (например, - снижение давления газа в трубопроводе ниже допустимого значения или превышение допустимой скорости изменения температуры среды).
Отметим особенность обработки прерываний: сигналы от каналов каждого
порта сгруппированы в один общий вектор: для порта P1 вектор прерывания с адресом Flash памяти– FFE8h, а для порта P2 – с адресом FFE2h. Поэтому в подпрограмме обработки прерывания после активизации вектора прерывания дополнительно должны анализироваться флаги прерывания, т.е. должен быть
9
установлен тот канал, на входе которого имело место изменения дискретного входного сигнала. Запрос прерывания от каждого канала портов Р1 и Р2 может быть индивидуально «разрешен» или «запрещен», а также может быть индивидуально сконфигурирован на инициирование прерывания по «переднему» или «заднему» фронту входного сигнала, т.е. по переходу из состояния логического «0» в состояние логической «1» или наоборот.
3) Таймеры А3 и В7 – это два 16-ти битных счетчика, на входы которых поступают импульсные последовательности образцовой частоты, а счетчики позволяют формировать до 8-ми различных временных интервалов, задаваемых программно.
4) Comp_A – это аналоговый компаратор: устройство, которое позволяет сравнивать уровень аналогового сигнала на входе с некоторым опорным уровнем, например, относительно напряжения Vо (1,5В или 2,5В) источника опорного (эталонного) напряжения. При превышении входным сигналом уровня опорного напряжения происходит «срабатывание» компаратора и формирование запроса сигнала прерывания. Выходной сигнал компаратора можно вывести на внешний вывод микроконтроллера или использовать в качестве входа для модуля захвата/сравнения таймера А или В.
5)ADC12−аналого-цифровой преобразователь, который осуществляет пре-
образование входной аналоговой величины в цифровой код, обладает следующими техническими характеристиками:
разрядность – 12 или 10 бит нормального двоичного кода;
скорость преобразования – 200 000 операций/с (обеспечивает временную дискретизацию – «оцифровку» - входного сигнала с временным шагом 5 мкс);
встроенное устройство выборки/хранения;
преобразование инициируется программным обеспечением или аппаратно от таймеров A или B;
встроенный генератор опорного напряжения 1.5 или 2.5 V;
буферная память преобразования и управления, позволяющая сохранить до 16 последовательных измерений;
восемь индивидуально конфигурируемых внешних входных каналов.
Вмодуле имеется датчик температуры, который позволяет учитывать влияние изменения температуры окружающей среды на погрешность аналогоцифрового преобразования.
6)DAC12 − цифро-аналоговый преобразователь, 12-ти разрядный.DAC осуществляет преобразования значений кодового значения сигнала, формируемых процессором, в выходной аналоговый сигнал напряжения постоянного тока.
7) UART- интерфейс определяет протокол бит-последовательной передачи данных, как в универсальном протоколе асинхронной передачи сигнала соглас-
но популярным интерфейсам RS232 и RS485, так и во внутриприборных протоколах SPI и I2C, которые будут рассмотрены ниже.
ВUART подключение к МК внешнего устройства может осуществляться через один или два порта. Каждый UART- порт имеет: URxD – вход приемника
(R-receiver data), UTxD – выход передатчика (T- transmitter data) и общий провод.

10
Краткие технические характеристики некоторых типов МК из семейства
MSP430 показаны в табл. 5.1
Таблица 5.1.
Встолбце «кол-во выводов» указано количество каналов ввода-вывода дискретных сигналов. Здесь показаны МК с количеством каналов 20 и 64, но есть микросхемы с другим количеством каналов, в том числе – с 14 и 48.
Встолбце Flash/RAM указывают соответственно объем Flash и RAM памя-
ти.
Встолбцах «таймеры» и «интерфейсы» указывается количество и типы таймеров и каналов для последовательной передачи сигналов. Обратим внимание на то, что интерфейсы UART есть не во всех исполнениях МК, но в некоторых есть два канала UART, а также каналы другого типа.
Встолбце BOR указывается наличие супервизора питания, а в столбце «Дополнительно» указывается наличие компаратора Comp_A, аналого-циф- рового преобразователя (ADC), цифро-аналогового преобразователя DAC.
Ранее отмечалось, что семейство MSP430 характеризуются низким потребленим электроэнергии. Так для сохранения содержимого ОЗУ необходим ток не более 0,1 мкА, а ток при максимальной производительности CPU не превышает 250 мкА. Низкое энергопотребление обеспечивает возможность длительной работы прибора при питании от автономного источника: батареи или аккумулятора.
Всемействе MSP430 есть исполнение MSP430C1101: 1кБ ПЗУ, 128 байт ОЗУ, сторожевой таймер, многофункциональный 16-разрядный таймер и аналоговый компаратор, которое на 100% совместимо с другими исполнениями МК семейства. MSP430C1101 на 2010г. рекламировался как МК с самым минимальным потреблением электроэнергии. По сравнению другими он обеспечивает до 10 раз большую экономию электроэнергии: в активном режиме (на 4 кГц) потребление составляет 1,3 микроампера, а в режиме ожидания потребление составляет всего 0,7 мкА. Если в среднем за сутки потребляемый ток принять равным 1мкА, то годовой расход энергии составит порядка 10мА*час. Стоимость MSP430C1101 при больших объемах поставок всего $0,49. Под такой МК может быть подобран аккумулятор для питания прибора в течение всего нормативного срока его эксплуатации. А это важно при создании систем различного назначения.