

ЛЕК+ЛАБА(СУМ) / Лек / 15ЭПА-1с
.pdf1
1.ЭЛЕМЕНТЫ И УСТРОЙСТВА СИСТЕМ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
1.1.Обобщенная схема системы автоматизированного управления
1.2.Основные понятия физических сигналов
1.2.1. Классифицирование физических сигналов «по типу»
1.2.2. Классификация физических сигналов «по виду»
1.2.2.1.Сигналы дискретного типа
1.2.2.2.Сигналы аналогового типа
1.2.2.3.Модуляция сигнала
1.3.Назначение и структура мониторинговой цепи.
1.3.1. Функции измерения ФВ.
1.3.2. Функции контроля ФВ и состояния объекта
1.3.Назначение и структура цепи управления
1.4.Назначение и структура цепи регулирования
2
1. ЭЛЕМЕНТЫ И УСТРОЙСТВА СИСТЕМ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
1.1.Обобщенная схема системы автоматизированного управления
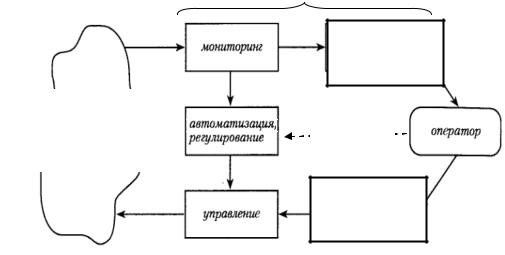
Система автоматизированного управления (САУ) объектом может быть обобщенно представлена схемой по рис.1.1, на которой показано, что САУ взаимодействует с одной стороны с технологическим объектом управления (ТОУ), а с другой – с оператором, (опе-
ратор – от лат. operator– работник, производитель), выполняющим функции управления ТОУ. При этом на оператора возлагаются функции:
непосредственного управления подачей команд пуска/останова работы оборудования, переключения режимов работы оборудования и поддержания требуемого режима работы оборудования;
контроля состояния физических величин, характеризующих свойства и состояния
ТОУ;
предупреждения и ликвидации аварийных состояний оборудования или ТОУ;
ведения отчетности о работе оборудования и ТОУ.
САУ
Устройства анализа и отображения информации
ТЕХНОЛОГИЧЕСКИЙ |
|
|
|
|
ОБЪЕКТ |
|
|
|
Уставка |
|
|
|||
УПРАВЛЕНИЯ |
|
|
|
|
|
|
|
регулятора |
|
(ТОУ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Устройства
формирования
управляющих
воздействий
Рис. 1.1. Схема системы автоматизированного управления
На рис.1.1 в структуре САУ выделены два контура взаимодействия с ТОУ, применительно к которым в данном курсе лекций будут рассматриваться элементы и устройства автоматики:
1) цепь операторского управления, обеспечивающая сбор информации о состоянии и свойствах ТОУ (через блок «мониторинг» и устройства анализа и отображения информации), представления информации человеку-оператору, который должен принимать управленческие решения о формировании управляющих воздействий на ТОУ (через устройства формирования управляющих воздействий и блок «управление»). Участие человека – оператора в управлении ТОУ является принципиальной особенностью реализации цепи операторского управления. В рассматриваемой цепи функции сбора информации о состоянии ТОУ и формирования управляющих воздействий на ТОУ осуществляются средствами автоматики, а оператор в этой цепи выполняет только ту часть функций, которые связаны с
3
принятием управленческих решений: определяет какое оборудование использовать для управления ТОУ, в каких режимах, как управлять работой ТОУ наиболее эффективно.ого управления (принятия управленческих решений), то такая цепь определяется как цепь автоматизированного управления. Одной из важнейших задач в реализации такой цепи управления является организация человеко-машинного интерфейса (HMI– human maschin interface), обеспечивающего эффективное участие оператора в управлении ТОУ;
2) цепь регулирования, в которой оператор только формирует (задает) регуляторам задания (в виде «уставок»: установок режимов работы, установок поддерживаемых значений физических величин) по стабилизации какого-то или каких-то параметров ТОУ, а исполняются эти задания без участия оператора. Поэтому такие цепи определяются как цепи автоматического управления, а совокупность элементов и устройств, реализующих автоматическое управление, называют «автоматом».
Взаимодействие САУ с ТОУ по рис.1.1 осуществляется посредством физических сигналов − материальных носителей информации. Физические сигналы в соответствии со своим назначением определяют то, какие элементы и устройства автоматики, должны выбираться для решения определенных задач автоматизации или автоматики: сбора информации о свойствах или состояниях ТОУ или целенаправленного воздействия на ТОУ для изменения его свойств или состояний.
Поскольку через входные и выходные физические сигналы реализуется назначение САУ, то прежде, чем рассматривать вопросы технической реализации контуров управле-
ния, рассмотрим основные понятия физических сигналов.
1.2.Основные понятия физических сигналов
Физические сигналы различают и по типу и по виду.
1.2.1. Классифицирование физических сигналов «по типу»
Классифицирование физических сигналов «по типу» основывается на выделении ти-
па материального носителя передаваемой информации о состоянии ТОУ.
Материальный носитель передаваемой информации может быть: тепловой, механи-
ческий, гидравлический, пневматический, акустический, магнитный, электромагнитный,
электрический или других типов.
Сигнал теплового типа характеризует скорость движения молекул в измеряемой среде. Сигнал механического типа характеризует изменение линейной или объемной характеристики какого-то элемента. Сигналы гидравлического или пневматического типов характеризуют, например, силу воздействия гидравлической или воздушной среды на определенные элементы. Акустический сигнал может характеризовать изменение скорости распространения звука в изменяющейся среде или время прохождения звуком контролируемого расстояния в определенной среде. Сигнал магнитного типа характеризует изменение магнитного потока, а сигнал электрического типа характеризует изменение пассивных или активных электрических величин.
В каждом конкретном случае тип материального носителя информации, определяется спецификой ТОУ.
Какого бы типа ни были входные и выходные физические сигналы, обеспечивающие взаимодействие с ТОУ, но в САУ они, как правило, должны быть представлены электрическим типом. «Как правило» ─ это значит, что могут быть САУ, в которых обработка входных сигналов и формирование выходных сигналов могут не преобразовываться в электрический сигнал, а выполняться по гидравлической или пневматической технологии.
В большинстве же случае, когда входные или выходные физические сигналы не являются сигналами электрического типа, в контурах управления должны быть устройства

4
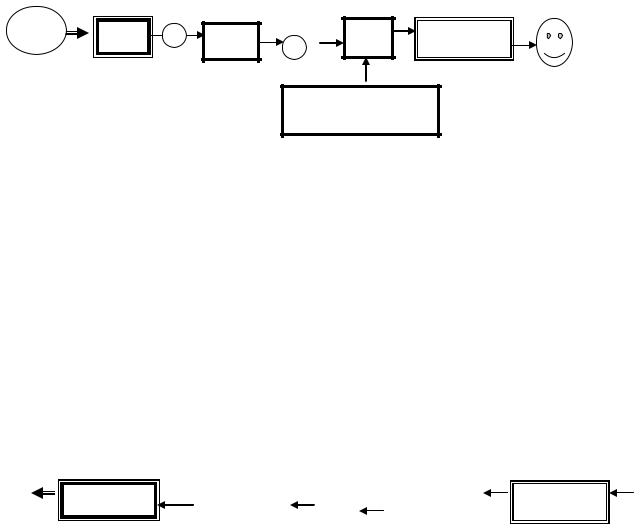
(элементы), осуществляющие преобразование физических сигналов одного типа в физические сигналы электрического типа в соответствии с рис.1.2.
Типы входного физического сигнала определяемого физической величиной ФВ характеризующей свойства (состояния) ОИУ
Электромагнитный
Тепловой
Механический
Гидравлический
Акустический
Ультразвуковой
Пневматический
и другие.
ПРЕОБРАЗОВАНИЕ СИГНАЛА ИЗМЕРЕНИЯ И КОНТРОЛЯ
ДАТЧИК :
(преобразователь одного типа |
|
|
физического сигнала |
Электрический |
|
в сигнал электрического типа ) |
||
|
а)
Типы выходного физического сигнала определяемого физической величиной управляемого воздействия
ПРЕОБРАЗОВАНИЕ СИГНАЛА |
|
|
||
УПРАВЛЕНИЯ |
|
|
Электромагнитный |
|
|
|
|
Тепловой |
|
Электрический |
|
|
Механический |
|
УПРАВЛЯЮЩЕЕ |
|
|
Гидравлический |
|
УСТРОЙСТВО : |
|
Акустический |
||
(преобразователь |
сигнала |
|||
|
Ультразвуковой |
|||
электрического типа в сигнал |
||||
|
Пневматический |
|||
какого-то другого типа) |
||||
|
Оптический |
|||
|
|
|||
|
|
|
и другие. |
|
б)
Рис..1.2. Преобразование типов физических сигналов
1) Если устройство в соответствии с рис. 1.2а осуществляет преобразование входного физического сигнала какого-то типа в электрический сигнал, то оно определяется как
первичный измерительный преобразователь (ПИП) или как датчик физической величины
(ФВ). Эти понятия чаще всего равносильны и взаимозаменяемы. В общем случае функции ПИП реализуются «отбором» ФВ из ОУ в соответствии с требованиями ее математической модели и последующим преобразованием типа «отобранного» сигнала в сигнал электрического типа.
Пример «отбора» ФВ − температуры теплоносителя из закрытого напорного трубопровода представлен ниже:  Сигнал электрического
Сигнал электрического
типа
(изменение сопротивления постоянного тока)
Сигнал теплового типа
Здесь передача сигнала – «температура теплоносителя» (Ттн) осуществляется последовательным ее преобразованием в «температуру гильзы» (Тг). Затем – в «температуру масла» (Тг), которым заполняют гильзу, и только потом − в «температуру термометра» (Тт), который, собственно, и осуществляет первичное измерительное преобразование сигнала типа «температура» в сигнала объемного расширения ртути (сигнал механический) или в сигнал электрического типа, например, - сопротивление постоянному току (Rx) : Ттн → Тг → Тт → Rx.
2) В каждой цепи передачи выходного физического сигнала (см. рис.1.2б) обязательно должно быть устройство, осуществляющее целенаправленное управляющее воздействие на ТОУ. На рис.1.1 оно обозначено как «управление». Синонимами управляющего устройства УУ являются – рабочий орган, исполнительное устройство, исполнительный механизм. Раз с помощью УУ должно реализовываться воздействие на ТОУ, то должно выполняться преобразование управляющего сигнала электрического типа в сигнал другого типа, например, - в температурный, механический, гидравлический и т.д.
5
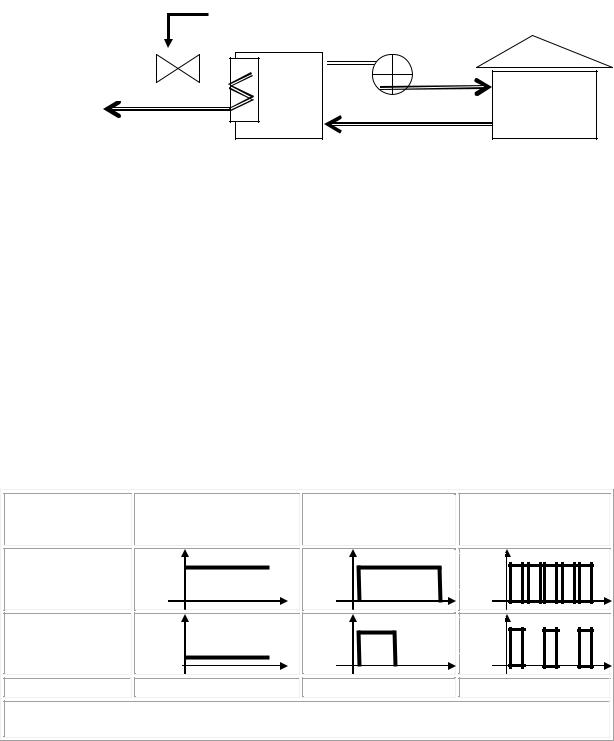
Пример такого преобразования показан ниже: в нагреватель Н через устройство управления УУ (задвижка) поступает теплоноситель. Из Н нагретая вода насосом подается в систему отопления дома.
УУ Сигнал электрический управляющий

 Н
Н
t =150°C
t
Управляющий сигнал электрического типа воздействует на УУ и изменяет расход теплоносителя в диапазоне от 0 (задвижка полностью закрыта) до 100% (задвижка полностью открыта). При этом осуществляется преобразование управляющего сигнала электрического типа в сигнал механического типа (перемещение задвижки). Призакрытие или приоткрытие задвижки соответственно уменьшает или увеличивает расход теплоносителя через нагреватель Н, что ведет, соответственно, к понижению или повышению температуры воды в системе отопления.
1.2.2. Классификация физических сигналов «по виду»
Классификация физических сигналов «по виду» основывается на выделении дискретных и аналоговых сигналов.
1.2.2.1. Сигналы дискретного типа
1) Дискретный сигнал характеризуется тем, что имеет только два состояния: логическая «1» или логический «0». Дискретный сигнал качественно определяет контролируемое свойство или состояние: «истинно», «ложно».
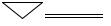
Примеры некоторых дискретных сигналов показаны на рис.1.3:
|
Уровень сигналов (U) |
Длительность |
Частота следования |
|
(напряж./сила тока) |
импульса (Т) |
импульсов (F) |
|
DC/AC |
|
|
Логическая «1» |
Umax |
Tmax |
Fmax |
|
|||
Логический «0» |
|
Tmin |
Fmin |
|
|
||
|
Umin |
|
|
|
а) |
б) |
в) |
|
Рис.1.3. |
Дискретные сигналы |
|
Чаще всего логическую «1» от логического «0» различают по уровню (по амплитуде сигнала напряжения или силы постоянного DC или переменного АС тока, рис.1.3а). При этом под логической «1» понимают высокий уровень сигнала Umax, определяемый как «истинно». Например,– высокий уровень напряжения, Umax. А под логическим «0» понимают уровень, определяемый как «ложно». Например, – низкий уровень напряжения, Umin. В общем случае Umin ≠0, но на практике в большинстве случаев используется частное решение: Umin =0.
6
Переход дискретного сигнала, представленного на рис.1.3.а из одного логического состояния в другое происходит мгновенно. Поэтому на практике такой сигнал имеет преимущественное использование.
Каких либо «жестких» указаний на то, «что надо принимать» за логический «0», а что за логическую «1» – не существует. Это решает сам разработчик элемента, устройства или системы, исходя из того, что он считает «лучше», «удобнее», «понятнее». Во всяком случае всегда можно применить операцию «инверсия» и изменить понятия логической «1» и логического «0» на противоположные.
На рис.1.3б дискретный сигнал представлен импульсами одной амплитуды, но разной длительности. В этом случае решение об оценке текущего состояния дискретного сигнала может быть принято на интервале не менее Тмах. А на рис. 1.3в дискретный сигнал представлен двумя разными частотами следования импульсов. Естественно, что в этом случае время, минимально необходимое для принятия решения о значении контролируемой величины (логический «0» или «1») составляет период меньшей частоты.
Единичный сигнал дискретного вида качественно определяет состояние установленного на объекте оборудования (включено/отключено, закрыто/открыто и т.п.) или состояние физических величин, характеризующих свойства или состояния ТОУ( норма/больше допустимого значения; норма/ниже допустимого значения; норма/авария).
Спрашивается, если дискретный сигнал по рис. 1.3а мгновенно характеризует изменение контролируемого состояния, то зачем другие – по рис.1.3б и 1.3в: для повышения достоверности результатов контроля. Особенности этого будут рассмотрены далее.
1.2.2.2. Сигналы аналогового вида.
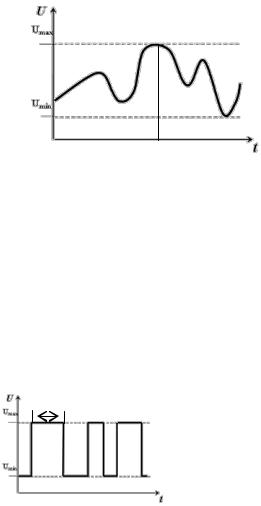
1) Сигнал аналогового вида представлен на рис.1.4.
Рис.1.4. Аналоговый сигнал
Аналоговый сигнал отражает процесс непрерывного изменения ФВ во времени – U(t), а состояние U(t) физической величины в каждый момент времени в этом процессе определяется количественно.
Аналоговый сигнал Ux(t) в любой момент времени t представляется бесконечным количеством значений его амплитуды в диапазоне возможного изменения от Umin до Umax. Это означает, что сигнал может измеряться и формироваться с бесконечным повышением разрешающей способности ∆U (чувствительности к изменению сигнала).
2) Аналоговый сигнал может быть представлен последовательностью импульсов, имеющих одинаковую амплитуду, но разную длительность:
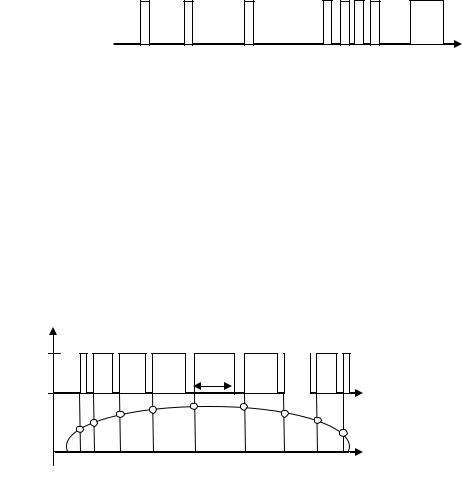
7
В этом случае информационная составляющая, количественно характеризующая свойства или состояние объекта, передается такой аналоговой величиной, как длительность импульса «τ».
3) Аналоговый сигнал может представляться количеством единичных импульсных сигналов сформированных на определенном интервале времени (см. рис. ниже):
Результат определяется количеством импульсов, которое количественно характеризует состояние объекта. Например: число сформированных импульсов определяет количество потребленной электроэнергии (количество оборотов диска электросчетчика за сутки) или количество холодной (горячей) воды за месяц, количество потребленного газа за час. Длительность импульсов в число-импульсной последовательности может быть одинаковой, но может быть и разной. Информационной характеристикой здесь является «переход от минимального значения уровня к максимальному» или «количество передних фронтов импульсов».
1.2.2.3. Модуляция сигнала
Возможна передача сигнала аналогового вида сигналом дискретного вида.
Процесс изменения сигнала одного вида в соответствии с формой сигнала другого вида называется модуляцией сигнала.
Umax |
|
|
τ |
0 |
t |
|
t
Ux
Рис.1.5. Модуляция аналогового сигнала сигналом дискретного вида
Например, на рис.1.5 (верхняя часть) показан сигнал дискретного вида. Он представлен импульсами с амплитудой Umax, которые передают информацию об аналоговом
изменении значения ФВ (см ниже - полуволна синусоиды) длительностью импульса, пропорциональной амплитуде синусоиды в определенной точке
1.3. Назначение и структура мониторинговой цепи.
Под мониторингом понимается информационный процесс, заключающийся в сборе информации, которая количественно и (или) качественно характеризует состояния или свойства ТОУ. В САУ любого назначения функция мониторинга (на рис.1.1: мониторинговая цепь –верхняя часть контура управления) является обязательной так как без информации о состоянии ТОУ управлять этим объектом принципиально невозможно.
В мониторинге различаются функции измерения и контроля состояния ФВ, а также контроля состояния технологического оборудования.

8
1.3.1. Функции измерения ФВ.
Измерение выполняется с целью получения количественной оценки исследуемой физической величины (ФВ), характеризующей состояния ТОУ.
Цепь мониторинга, анализа и отображения информации по рис.1.1, может быть представлена в виде измерительного канала, включающего в себя следующие структурные элементы (компоненты измерительного канала): датчик или первичный измерительный преобразователь (ДФВ или ПИП-ФВ) ФВ; измерительные преобразователи (ИП) разного функционального назначения и вычислительный компонент (ВК):
ФВ |
|
ДФВ |
КС |
ИП |
|
ИП |
КС |
КВ |
|
.. |
… |
||||||
|
|
|
|
КС |
|
|
||
|
|
|
|
ИП-мера |
|
|
|
|
ДФВ(ПИП)− это конструктивно законченный элемент, − средство измерения, предназначенное для «отбора» из ТОУ сигнала того типа, который характеризует состояние измеряемой ФВ и формирует выходной сигнал с нормированными метрологическими характеристиками. Напомним, что под нормированными метрологическими характеристиками понимаются: диапазон изменения ФВ; закон измерительного преобразования, определяющей связь входной и выходной величин; основная погрешность измерения; дополнительные погрешности измерения.
ИП− измерительный преобразователь (он также может называться – компонент измерительный) − это конструктивно законченный элемент с нормированными метрологическими характеристиками, служащий для преобразования входного измерительного сигнала одного типа в выходной измерительный сигнал того же или другого типа, удобный для передачи по линии связи, для обработки, хранения и индикации. ИП может выполнять измерительные преобразования сигнала одного вида «аналог-аналог», так и выполнять преобразования вида «аналог-цифра», может осуществлять фильтрацию входного сигнала от помех, а также при необходимости может осуществлять линеаризацию статической характеристики датчика с целью получения линейной зависимости входной и выходной величины во всем или в каком-то диапазоне изменения ФВ.
Разновидностью ИП может быть мера измеряемой величины и устройство сравнения измерительного сигнала, представленного в той или иной форме, с мерой ФВ.
КВ– компонент вычислительный – это техническое устройство, осуществляющее обработку измерительного сигнала, представленного в цифровой (кодовой) форме;
КС– компонент соединительный, предназначенный для передачи измерительного сигнала между измерительными компонентами (ДФВ, ИП) измерительного канала и вычислительным компонентом.
Мониторинг - это сбор значений переменных процесса, их хранение и отображение в форме, наиболее удобной для человека-оператора. Мониторинг может быть ограничен выводом первичных или обработанных данных на экран монитора или на бумагу, а может включать более сложные функции анализа и отображения. Например, – функции косвенных измерений тех физических величин, которые нельзя непосредственно измерить. Другой классической функцией мониторинга является проверка того, что измеренные (рассчитанные) или просто контролируемые значения находятся в допустимых пределах.
1.3.2. Функции контроля ФВ и состояния объекта
Контроль состояния ФВ выполняется относительно некоторого состояния, определяемого как «уставка». В этом случае выходной сигнал представляется в дискретной форме, определяя состояние ФВ качественной оценкой: «норма-больше», «норма-меньше», «норма-авария» и т.д.
9
Структура измерительного канала, реализующего функцию контроля отличается от структуры измерительного канала, реализующего функцию измерения, наличием элемента сравнения СУ: на один вход СУ поступает измеряемый сигнал Х, на второй вход СУ подается сигнал Хо, соответствующий контролируемому значению ФВ (уставке), а выходной сигнал СУ представляется логическим «0» или логической «1». Что в этой оценке определять как логический «0», а что как логическую «1» решается спецификой САУ.
ФВ |
|
|
Х |
|
|
ДФ |
ИП |
… СУ |
КВ |
||
.. |
Хо
Контролируемое значение ФВ
Обратим внимание на то, что раз в рассматриваемой структуре имеется измерительный канал, то значит должна быть нормирована погрешность контроля, т.е. такое устройство контроля должно иметь нормированные метрологические характеристики: диапазон изменения, погрешность.
Контроль состояния объекта (не ФВ) отличается тем, что в структуре такого канала нет элементов измерительного преобразования. Поэтому результат контроля представляется дискретным сигналом, а нормирование самого контроля осуществляется только условиями его выполнения.
1.4. Назначение и структура цепи управления
Управление − это исполнительная функция. Структура канала управления также может быть представлена совокупностью преобразователей, которые обозначим как – функциональные (ФП) (в отличие от измерительных преобразователей в измерительном канале).
УУ |
ФП |
…. |
ФП |
ВК |
|
|
|
|
|
Функция управления означает, что оператор формирует команду в виде управляющего сигнала непосредственно или через вычислительный компонент ВК. Далее управляющий сигнал подвергается необходимым функциональным преобразованиям с последующим воздействием на объект через исполнительное устройство (исполнительный механизм).
Функциональный преобразователь − устройство, выполняющее преобразование типа или вида сигнала. Поскольку выходной сигнал ВК по определению представляется в
ацифровой форме, то одно из преобразований может быть «цифра−аналог», обратное преобразованию «аналог-цифра» в измерительном канале. Другие функциональные преобразования – усиление сигнала по мощности, частотное преобразование и т.д..
Устройство управления − это конечное устройство цепи управления, реализующее исполнительное воздействие на ОУ, в том числе используя преобразование сигнала одного типа в сигнал другого типа. Такое преобразование реализуется управляемой задвижкой, насосом, нагревательным устройством, режущим механизмом и т.п. Ранее был
10
рассмотрен пример преобразования электрического сигнала в механическое перемещение заслонки задвижки с целью управления температурой в сети отопления.
1.4. Назначение и структура цепи регулирования
Система, которая действует автономно и без прямого вмешательства оператора, называется автоматической. Такая система состоит из элементов мониторинга, управления и регулирования.
|
Мониторинг |
|
ОБЪЕКТ |
РЕГУЛЯТОР |
Уставка |
|
регулятора |
|
УПРАВЛЕНИЯ |
|
|
|
|
|
|
Управление |
|
Устройство, реализующее функции регулирования, называется регулятором. Регулятор следит за работой ТОУ (мониторинг) и вырабатывает управляющие сиг-
налы (управление), целенаправленно воздействующие на ТОУ. Выработка управляющих воздействий осуществляется по определенным алгоритмам. Действие этих алгоритмов характеризуются: погрешностью, определяемой разностью установившегося значения ФВ и уставки; временем приведения значения ФВ к уставке после внешнего возмущающего воздействия (если нет внешних воздействий, то и нет задачи стабилизации значения ФВ); качеством приведения ФВ к значению уставки, определяемым наличия «перерегулирования» значения ФВ.
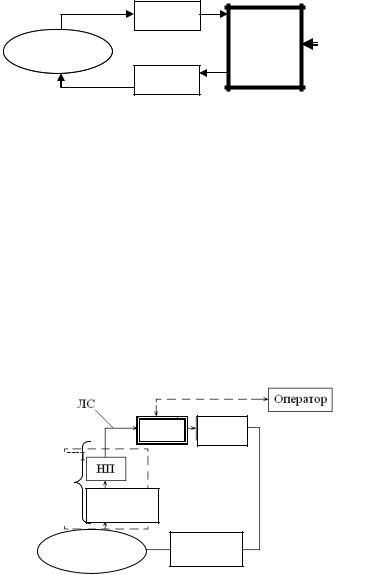
Для примера рассмотрим структурную схему простой локальной системы управления (рис.1.5.), в которой приняты следующие обозначения: ОУ – объект управления (технологический объект); Д – датчик (или ПИП); ИП-Н –измерительный преобразователь нормирующий; ЛС – линия связи; Рег – регулятор; УМ – усилитель мощности; ИУ – исполнительное устройство (механизм);
Рег УМ
Д
ПИП
ОБЪЕКТ |
ИУ |
|
УПРАВЛЕНИЯ |
||
|
Рис. 1.5. Пример САУ с регулятором
Основой показанной САУ является регулятор Рег., который должен принимать входной сигнал от датчика Д и формировать выходной сигнал через усилитель мощности УМ на исполнительное устройство ИУ.
Для того, чтобы обеспечивалась совместимость Рег с используемыми Д и УМ решена задача унификации сигналов.
В Д выходной сигнал ПИП нормируется, т.е. приводится к одному из универсальных сигналов, с помощью нормирующего преобразователя НП. Так, например, выходной сигнал ПИП может быть в диапазоне 0…10мВ, а входной диапазон унифицированного сигна-