

Так например, однопролетная балка, изображенная на рис. 2.14, б, трижды статически неопределима. А балка, изображенная на рис. 2.14, в, один раз статически неопределима. Для удобства, результаты расчетов эпюры моментов однопролетных статически неопределимых элементах, с различными граничными условиями их закрепления, от действия наиболее часто встречающихся силовых и температурных нагружений, обобщены в таблице 2.4 (пп. 1,2,5,6,7,10).
При неравномерном нагреве по высоте поперечного сечения балки и при равномерном нагреве по ее длине, изгибающие моменты и поперечные силы определяются согласно общеизвестных выражений:
![]() ,
,
где a - температурный коэффициент линейного расширения; h -высота поперечного сечения; х - независимая переменная 0 £ x £ l; l - длина элемента.
В заключении заметим, что применяя метод перемещений, следует твердо придерживается какого-либо определенного правила знаков. Принять, что углы поворота опорного сечения, а также реактивный момент, действующий на балку со стороны заделки, положительны, если в результате оси поворачиваются по часовой стрелке. Линейное смещение узла принято положительным, если оно совпадает по направлению с положительной реакцией, вызывающей растяжение опорного сечения стержня.
2.8. Пример расчета плоской рамы методом перемещений (задача 8)
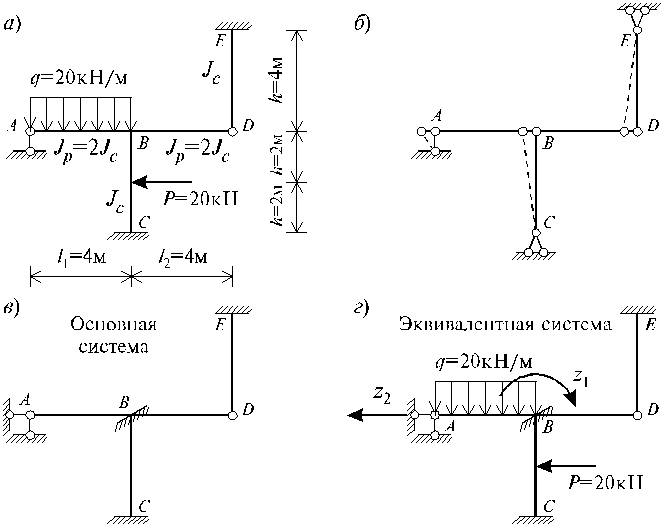
Рассчитаем плоскую раму (рис. 2.15, а) методом перемещений и выполним при этом все необходимые проверки. Последовательность расчета следующая.
Определение степени кинематической
неопределимости
Степень кинематической неопределимости определяем по формуле:
n = ny + nл ,
где nу - число неизвестных углов поворота, равное всегда количеству жестких узлов рамы, исключая опорные; nл - число независимых линейных перемещений узлов рамы, равное степени геометрической изменяемости шарнирной схемы рамы, полученной из заданной путем введения во все жесткие узлы, включая опорные, полных шарниров.
В заданной раме nу = 1. Для определения nл вводим во все жесткие узлы, включая опорные, полные шарниры и находим степень геометрической изменяемости полученной шарнирной схемы рамы (рис. 2.15, б) по формуле:
nл = W = 2 У - C - Cоп ,
где У = 5 - число узлов в шарнирной схеме рамы, включая и опорные; С = 4 - число стержней в шарнирной схеме рамы; Соп = 5 -число опорных связей с землей шарнирной схемы рамы.
nл = 2×5 - 4 - 5 = 1.
Полученное значение говорит о том, что шарнирная схема один раз геометрически изменяема. Действительно, под действием силы P узлы A, B и D могут переместиться влево, так как левый конец ригеля AB этой системы опирается на шарнирно-подвижную опору А, не препятствующую этому перемещению.
Таким образом, заданная рама имеет одно угловое и одно линейное неизвестное перемещение, а общее количество неизвестных будет равно двум:
n = ny + nл = 1 + 1 = 2.
Заданная рама дважды кинематически неопределима.
2. Получение основной и эквивалентной систем метода перемещений
Основную систему метода перемещений получаем путем постановки дополнительной заделки в узле В, препятствующей неизвестному угловому перемещению, и дополнительного горизонтального опорного стержня в опоре А, препятствующего неизвестному линейному перемещению (рис. 2.15, в).
Загрузив основную систему внешней нагрузкой и неизвестными перемещениями Z1 и Z2 , равными по величине действительным перемещениям заданной системы, получим эквивалентную систему, деформирующуюся тождественно заданной (рис. 2.15, г).
3. Составление канонических уравнений метода перемещений
Как было указано выше, суммарная реакция в каждой дополнительно введенной связи от всех действующих в эквивалентной системе факторов равна нулю, так как эквивалентная система полностью совпадает с заданной (в которой эти связи отсутствуют) и реакций в них быть не может.
В развернутом виде канонические уравнения имеют вид:
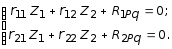 (2.29)
(2.29)
4. Вычисление коэффициентов канонических уравнений и проверка правильности их вычисления
4.1. Определение коэффициентов канонических уравнений
Для определения коэффициентов необходимо построить единичные и грузовые эпюры изгибающих моментов в основной системе метода перемещений. Для их построения используются таблицы эпюр изгибающих моментов и реакций статически неопределимых балок (см. табл. 2.4).
Единичные и грузовые эпюры изгибающих моментов, построенные в основной системе для рассматриваемого примера, показаны на рис. 2.16, а, в, д.
Для определения реактивного момента r11, возникающего в дополнительно поставленной заделке узла В от поворота этого узла на угол Z1 = 1, вырезаем узел В из эпюры M1 (рис. 2.16, б) и решаем уравнение равновесия SMуз = 0:
r11 - 1.5 EJс - 1.5 EJс - EJс = 0, откуда r11 = 4 EJс .
Реактивный момент в дополнительно поставленной заделке узла В от линейного смещения Z2 = 1 узлов В и С определяем из условия равновесия SMуз = 0 узла В, вырезанного из эпюры М2 (рис. 2.16, г):
r12 - 0.375 EJс = 0, r12 = 0.375 EJс .

Такая же по величине, согласно теореме о взаимности реакций, будет и реактивная сила r21, возникающая в дополнительно поставленном горизонтальном стержне опоры А от поворота заделки узла В на угол Z1 = 1:
r12 = r21 = 0.375 EJс .
Реактивный момент R1Pq , возникающий в заделке узла В от внешних нагрузок Р и q, найдем из уравнения равновесия SMуз = 0 узла В, вырезанного из эпюры МPq (рис. 2.16, е):
R1Pq - 40 + 10 = 0; R1Pq = 30 кН×м.
Реактивное усилие r22, возникающее в горизонтальном опорном стержне опоры А от перемещения узлов В и С на величину Z2 = 1, найдем проведя разрез I-I на эпюре M2 (см. рис. 2.16, в) и определив действующие в местах сечения элементов горизонтальные усилия (рис. 2.17,а) из уравнения равновесия SZ = 0:
-r22 + 0.18×5 EJс + 0.0468×5 EJс = 0, r22 = 0.02344 EJс .
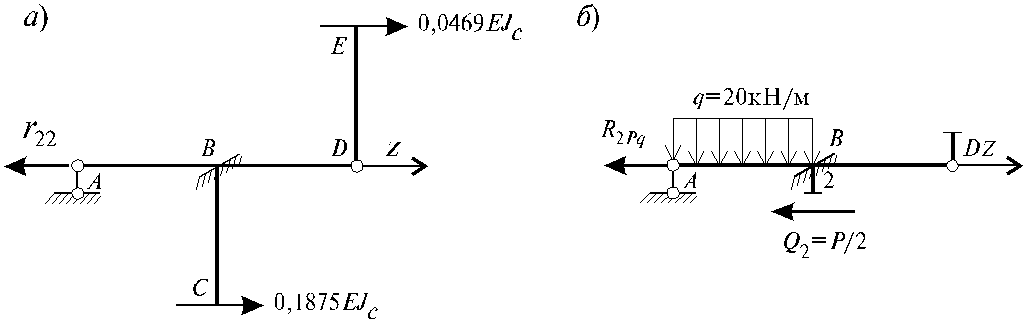
Проведя разрез II-II на эпюре MPq (рис. 2.16, д) и определив горизонтальные усилия в рассеченных элементах, из уравнения SZ = 0 найдем реактивное усилие R2Pq , возникающее в дополнительно поставленном опорном стержне опоры А от действия внешней нагрузки (рис. 2.17, б):
-R2Pq + 10 -20 = 0; R2Pq = -10 кН.
Определяя реактивные усилия, всегда следует иметь в виду, что они считаются положительными, если направления их действия совпадают с принятым направлением действия неизвестных перемещений Z1 и Z2.