

Лазерное сканирование 2014 / Литература Лекции / Середович В.А., Комиссаров А.В., Комиссаров Д.В., Широкова Т.А. Наземное лазерное сканирование. 2009
.pdfФормулы (1) являются обобщенными для перехода от полярной системы координат к пространственной декартовой. Для каждого конкретного сканера они имеют индивидуальный вид, где учитываются несовпадение источника излучения и приемника, эксцентриситет вертикальной и горизонтальной осей вращения прибора и другие величины, которые называются параметрами калибровки сканера [126–128, 148].
1.2.Принцип работы дальномерного блока наземных лазерных сканеров
Всуществующих моделях сканеров реализовано три метода измерения расстояний:
импульсный; фазовый; триангуляционный.
Импульсный метод измерения расстояний основан на измерении времени прохождения сигнала от приемо-передающего устройства до объекта и обратно (рис. 5) [16, 64, 89]. Зная скорость распространения электромагнитных волн , можно определить расстояние как:
R |
v |
, |
(2) |
|
|
2 |
|
|
|
|
|
|
|
|
где  – время, измеряемое с момента подачи импульса на лазерный диод до момента приема отраженного сигнала.
– время, измеряемое с момента подачи импульса на лазерный диод до момента приема отраженного сигнала.
Фазовый метод измерения расстояний основан на определении разности фаз посылаемых и принимаемых модулированных сигналов (см. рис. 5). В этом случае расстояние вычисляется по формуле [16, 64, 89]:
R |
2 R |
v |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
4 |
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где |
2R |
|
разность фаз между опорным и рабочим сигналом; |
||||||||||||||||||||||||||||||||||||||||||||
f – частота модуляции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|



 объект
объект 
сканирующая система
излучатель |
|
|
|
приемник |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 счетчик времени/фаз
счетчик времени/фаз
Рис. 5. Принцип импульсного/фазового методов измерения расстояний
В формуле (3) 2R можно разложить на целую и дробную часть, тогда эта формула примет вид:
R |
|
N N , |
(4) |
2 |
|||
где |
|
– длина волны ( |
= v/f); |
N – целое число уложений длин полуволн /2;
N – дробная часть уложения длин полуволн в измеряемом расстоянии ( N
=/2 ).
Режим работы фазоизмерительного устройства зависит от его температуры, с изменением которой незначительно изменяется фаза сигнала. Вследствие этого точное начало отсчета фазы (место нуля) определить нельзя. С этой целью фазовые измерения повторяют на эталонном отрезке (калибровочной линии) внутри прибора. Место нуля можно определить как разность отсчетов при измерении внешнего (от дальномера до объекта и обратно) и внутреннего (калибровочной линии) световых путей и оно будет найдено тем точнее, чем меньше интервал времени между обоими измерениями [28].
Уравнение (4) называется основным уравнением фазовой дальнометрии. В данном уравнении неизвестными величинами являются S и N, следовательно, решить его напрямую невозможно. Задача определения числа N называется разрешением неоднозначности (или многозначности), для решения этой задачи применяются следующие способы [16]:
плавного изменения частоты; последовательных приближений; фиксированных частот; комбинированных частот.
Способ плавного изменения частоты. В этом способе используется плавное изменение частоты модуляции. Сущность способа состоит в том, что при изменении частоты модуляции меняется разность фаз φ2S, и в диапазоне перестройки можно подобрать такие частоты, при которых N принимает одинаковые значения. Эти частоты расположены эквидистантно на частотной оси. В результате образуется система из двух уравнений вида (4) и добавляется еще одно [16]:
n1 2 N1 N2 , (5)
где n1-2 – разность порядковых номеров частот f1 и f2 на частотной оси; N1 и N2 – порядковые номера частот.
Недостатком способа плавного изменения частоты является ограничение минимального измеряемого расстояния [16]:
Rmin |
v |
|
|
f , |
(6) |
||
|
где f – диапазон изменения частоты.
Способ последовательных приближений. Он является разновидностью способа плавного изменения частоты. Сущность способа заключается в том, что расстояние вычисляют путем последовательных приближений по формуле:
R |
v |
|
2 f , |
|
|
|
(7) |
где f – разность смежных частот, у которых величина |
N одинакова. |
Сначала находят R с использованием величины δf |
в начале диапазона |
частот, которое является значением в первом приближении. Затем вычисляют расстояние R по формуле (7), используя разность первой и третьей частот, разделенных интервалом 2 f и делением результата на два. В следующем приближении используется интервал 3 f и т. д. до тех пор, пока интервал частот в следующем измерении не будет отличаться от предыдущего на величину менее /4, т. е. расстояние становится известным с точностью, необходимой для безошибочного определения числа N на любой из рабочих частот в пределах всего диапазона модуляции [64].
Способ кратных частот. Для решения уравнения (4) необходимо приближенно знать R с точностью, которая обеспечит определение количества целых уложений полуволн N по формуле [16]:
N |
2Rприбл |
N |
|
||
|
|
|
|
||
|
|
|
|
. |
(8) |
Погрешность в определении числа N должна быть меньше 0,5, |
|||||
следовательно, ошибку нахождения приближенного значения R можно |
|||||
вычислить по формуле [64]: |
|
||||
mR |
|
|
|
|
|
4 . |
|
(9) |
|||
|
|
||||
В данном способе используют два метода разрешения неоднозначности: кратных частот; комбинационных частот.
Метод кратных частот. В данном методе используется m фиксированных частот, которые дают m независимых уравнений. Фиксированные частоты составляют ряд f1 > f2 > f3 > … > fm. Сущность метода заключается в определении N из результатов измерения разности фаз на следующей более низкой частоте по формуле:
Ni 1 |
i |
Ni |
Ni |
Ni 1 |
|
|
|
i |
1 |
, |
(10) |
|
|
|
|
||
где i = (m, …, 4, 3, 2). |
|
|
|||
Целочисленную величину, равную: |
|
||||
k |
i |
|
|
|
|
i 1 , |
|
(11) |
|
||
|
|
|
|||
называют коэффициентом неоднозначности, и она тем больше, чем точнее |
|||||
определяется |
N. |
|
|
||
Метод комбинационных частот. В этом методе также используется набор частот f1 > f2 > f3 > … > fm, но все они являются величинами одного порядка и задаются последовательностью f1 > (f1 – fm) > (f3 – fm-1) > … > (f1 – f2). При этом разность результатов измерения фаз на двух частотах эквивалентна измерению на разностной частоте.
Ошибка определения приближенного расстояния комбинационным методом вычисляется по формуле [64]:
mR |
k |
|
|
(12) |
|
||||
|
4 , |
|||
где k определяется из выражения ki,i+1 = i,i+1/ i = fi /(fi – fi+1). Погрешность определения длины волны, если задача решается при двух
частотах, вычисляется по формуле [28]:
m |
mN |
1 2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
4R2 |
2 |
|
|
2 |
|
|
(13) |
||
|
|
|
|
|
|||||
|
|
|
1 |
|
|
2 . |
|||
Если mN ≤ 0,5 и λ1 ≈ λ2, то выражение (13) преобразуется к виду |
|||||||||
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 128 . |
|
|
|
(14) |
|||||
|
|
|
|
||||||
Из выражения (14) видно, что частота (длина волны) должна быть как можно стабильнее.
Способ комбинированных частот. В данном способе используются два генератора частот, настроенных на частоты f1 и f2, и генератор переменной частоты. Таким образом, в этом способе будет иметь место уравнение (4) для двух частот и уравнение (5), в котором число n1-2 известно, так как оно может быть вычислено при изменении частоты.
Триангуляционный метод измерения расстояний наземными лазерными сканерами. В настоящее время существует два варианта реализации триангуляционного метода измерения расстояний.
Сущность первого варианта измерения расстояний триангуляционными сканерами заключается в следующем. С помощью проектора лазерный луч низкой мощности отклоняется от исходного направления [154]. Угол 1, образуемый базисом сканера d и лазерным лучом, вычисляется по положению изображения лазерного пятна на приемнике первой ПЗС-камеры (рис. 6). Угол
2 образуется осью (базисом) сканера и вектором распространения отраженного сигнала от объекта, фиксируемого второй ПЗС-камерой [98, 136, 154]. Термин «триангуляционный лазерный сканер» заимствован из англоязычной литературы и является несколько некорректным, поскольку принцип работы сканера основан на определении расстояний до объекта методом прямой угловой засечки с помощью величин 1, 2 и d. Но так как в отечественных публикациях нет никаких аналогов этому названию, то в тексте работы будет использоваться термин «триангуляционный лазерный сканер».
Рис. 6. Принцип действия НЛС Mensi Soisic и S-series (вид сверху)
Сущность другого принципа действия триангуляционных лазерных сканеров показана на рис. 7.
Рис. 7. Принцип действия НЛС Minolta (вид сбоку)
Как видно из рис. 7, в сканерах типа Minolta вместо ПЗС-камеры 1 используется полигональное зеркало, которое при помощи сервопривода отклоняет лазерный луч. В данном случае угол 1 измеряется при помощи лимба, который регистрирует угол поворота полигонального зеркала относительно начального положения. Основные особенности при измерении расстояний данными триангуляционными сканерами: 1) развертка луча в горизонтальной плоскости происходит при помощи системы линз, расположенных вблизи лазерного источника, поэтому сканирование выполняется не лучом, а плоскостью; 2) отсутствует сервопривод, который выполняет поворот головки сканера.
Поскольку дальность действия производимых на сегодня триангуляционных лазерных сканеров составляет от десятков сантиметров до 25 м, ошибки в измеряемых углах, вызванные влиянием атмосферы (рефракцией и затуханием электромагнитных колебаний), практически не оказывают влияния на результаты измерений. Точность получения пространственных координат точек объекта триангуляционными сканерами составляет от 50 мкм до 0,3 мм и в основном зависит от величины измеряемого расстояния, инструментальных ошибок прибора, методических ошибок, связанных с точностью математических решений, положенных в основу управляющего программного продукта сканера, а также от материала, текстуры и формы сканируемого объекта.
При сканировании объектов триангуляционными сканерами производители рекомендуют использовать специальные порошки, которые делают поверхность объекта съемки однородноотражающей. Ошибки в углах, вызванные влиянием текстуры, формы и материала объектов сканирования, обусловлены тем, что возникает различное отражение отдельных частей падающего лазерного луча или плоскости. Это приводит к перераспределению энергии принимаемого пучка, из-за чего возникают его асимметрия и, в результате, неправильное определение центра пятна входного сигнала.
Областями применения триангуляционных сканеров в основном являются машиностроение, медицина, авиастроение и другие [136].
1.3.Способы измерения угловых величин, реализованные в наземных лазерных сканерах
При автоматизации угловых измерений выделяют следующие основные способы [13, 45]:
1)с применением кодовых дисков с масками числовых шкал;
2)с применением импульсных (инкрементальных) дисков;
3)электроиндуктивные (частотный, амплитудный, фазовый, емкостный);
4)временной;
5)комбинированный (импульсно-временной);
6)с применением комбинаторных шкал;
7)с применением штриховых кодовых шкал;
8)поляризационный;
9)интерференционный.
Вся совокупность средств и способов автоматизации угловых измерений по принципу считывания направлений или измерения углов подразделяется на две группы [13, 45]:
 позиционные (абсолютные) способы, в которых направление (позиция) считывается с диска (лимба) в градусной мере. Угол получается как разность двух отсчетов;
позиционные (абсолютные) способы, в которых направление (позиция) считывается с диска (лимба) в градусной мере. Угол получается как разность двух отсчетов;
 накопительные (относительные) способы, в которых угол измеряется в результате накопленной суммы импульсов между начальной (стартовой) и конечной (стоповой) сторонами угла.
накопительные (относительные) способы, в которых угол измеряется в результате накопленной суммы импульсов между начальной (стартовой) и конечной (стоповой) сторонами угла.
Кодовые диски с масками числовых шкал. В данном способе лимб, с которого считывается угловая величина, представляет собой кодовый диск, на котором нанесена система кодовых дорожек, состоящих из отдельных элементов типа «да-нет». Расположение этих элементов таково, что они в определенном коде зашифровывают измеряемую угловую величину, при этом каждая дорожка выражает один разряд в значении измеряемого угла. Количество дорожек и последовательность расположения элементов в них зависят от выбранного кода и точности измерения угловых величин. Считывание кода производится оптическим способом. Данный способ измерения углов относится к абсолютным [13, 16, 45].
Импульсные диски. Сущность импульсного способа измерения углов состоит в том, что величина угла определяется количеством импульсов (инкрементов, являющихся последовательностью штрихов и интервалов между ними – элементов типа «да-нет»), укладывающихся на дуге окружности, заключенной между двумя сторонами угла. Этот способ основан на использовании штрихового растра – системы радиальных штрихов, наносимых на внешнем крае лимба или алидады через одинаковые интервалы. Данный способ измерения углов принадлежит к числу относительных [13, 16, 45].
Электроиндуктивные способы. Эти способы основаны на принципе, аналогичном применяемому в генераторах переменного тока. В системах, основанных на электроиндуктивном способе измерения углов, статором является круглая пластина с впечатанным (впрессованным) проводником

постоянно направленного напряжения. Устройство такого типа называется индуктосином. Над статором вращается ротор, также с впрессованным проводником. При вращении ротора возникает ток, частота которого зависит от числа полюсов статора. Индуктосины могут быть амплитудными, когда схема питания статора обеспечивает постоянство фазы выходного напряжения и изменение амплитуды напряжения, снимаемого с ротора, пропорционально его углу поворота, а также фазовыми, когда амплитуда напряжения, снимаемого со статора, постоянна, в то время как фаза меняется в зависимости от угла поворота ротора. Фазовые индуктосины более точны, так как преобразование фазы в число осуществляется точнее [13, 45].
Временной способ. Сущность данного способа определения углов заключается в измерении времени вращения марки, которая выполняет роль отсчетного устройства. Сложность реализации временного способа состоит в необходимости создания устройства, позволяющего вращать марку со скоростью, достаточно стабильной для данного класса точности измерений. Величина измеряемого угла в данном способе определяется по формуле
[13, 45]:
2 r |
n |
, |
(15) |
|
60 |
||||
|
|
|
где – время вращения марки;
n – число оборотов марки в минуту; r – радиус вращения марки.
Данный способ является разновидностью относительных. Комбинированный способ. Данный способ в литературе называют также
динамическим. В системах с комбинированным способом измерения углов имеются источник и приемник излучения, определяющий опорные направления, а также источник и приемник излучения, жестко соединенные с алидадой, задающей направление поворота лимба. При вращении лимба (диска) над фотодиодами, перекрытыми щелью, в них возникает фототок, который преобразуется в импульсы. Оба фототока, а, следовательно, и импульсы, будут сдвинуты по фазе в зависимости от количества импульсов N и . Эту разность фаз определяют с помощью подсчета импульсов между марками, связанными с лимбовой и алидадной частями. Таким образом, получают грубый отчет при измерении углов. Дробную часть отсчета находят по времени вращения марки  между импульсами двух сигналов. Этот способ можно отнести к абсолютным способам измерения углов. Он применяется в приборах, которые выступают в качестве эталонных при аттестации угломерных инструментов [13, 45].
между импульсами двух сигналов. Этот способ можно отнести к абсолютным способам измерения углов. Он применяется в приборах, которые выступают в качестве эталонных при аттестации угломерных инструментов [13, 45].
Комбинаторные шкалы. Данный способ измерения углов является модификацией кодового. В нем устранены следующие недостатки: сложность изготовления дисков с несколькими кодовыми дорожками и громоздкость конструкции считывающего устройства. В комбинаторном способе используется диск с одной кодовой дорожкой, а считывание информации производится с помощью нескольких датчиков. Положение и количество считывающих датчиков подобрано так, что каждому дискретному углу

поворота шкалы соответствует определенная комбинация состояний считывающих элементов, то есть кодовая комбинация [45].
Штриховые кодовые шкалы. Данный способ отличается от кодовых способов с числовыми шкалами тем, что информация об измеряемых углах здесь представлена в виде штрихов.
Поляризационный способ. Сущность поляризационного способа основана на известной зависимости угла поворота плоскости поляризации в лазерном пучке от угла поворота самого пучка. Основными составляющими частями поляризационного угломера являются лазер с коллиматором, цилиндрическая линза, передающие и приемные (полупропускающие) зеркала, микроэлектродвигатель, объектив, поляризатор-анализатор, диафрагма, фотоприемник, алфавитно-цифровой преобразователь миниЭВМ и отражатель [13].
Интерференционный способ. В этом способе для угловых измерений используется явление интерференции световых волн [13].
В угломерных блоках НЛС применяются штриховые кодовые шкалы, кодовые диски с масками числовых кодов, импульсные диски, комбинаторные шкалы, штриховые кодовые шкалы, так как они обеспечивают высокую скорость считывания, высокую точность измерения (ошибки измерения углов составляют несколько секунд), простую конструктивную реализацию.
1.4. Обзор и классификация наземных лазерных сканеров
Модели наземных сканеров. В настоящее время разработкой приборов для трехмерного лазерного сканирования занимается множество фирм: широко известные Trimble (США) и Leica Geosystems (Швейцария), а также Riegl (Австрия), I-Site (Австралия), Zoller+Fröhlich (Германия) и другие. Все эти фирмы выпускают сканеры для различных целей. Задачи, решаемые конкретной
|
моделью НЛС, определяются его техническими |
|
характеристиками [53]. |
|
Фирма Trimble выпускает сканер под названием |
|
Callidus 3D Laser Scanner (рис. 8). Конструктивной |
|
особенностью данного сканера является то, что |
|
внутри головки объединены: блок развертки, |
|
цифровая видеокамера (с фокусным расстоянием от |
|
4,1 до 73,8 мм и горизонтальным разрешением 460 |
|
линий на столбец скана), датчик наклона прибора |
|
(инклинометр), электронный компас и блок |
|
управления. Инклинометр, который имеет диапазон |
|
действия 10 и точность 0,025 , предназначен для |
|
устранения ошибок в измеренных координатах точек |
|
скана за наклон инструмента. НЛС оснащен |
|
системой, обеспечивающей внутренний контроль |
|
блоков прибора и автоматический ввод атмосферных |
Рис. 8. НЛС Callidus 3D |
поправок в измеренные расстояния [100]. |
Laser Scanner |
Кроме сканера Callidus 3D, фирмой Mensi |
(Франция) под маркой фирмы Trimble выпускались сканеры GS100, GS200, Soisic, S10 и S25 (рис. 9, а, б, в), ныне снятые с производства. В настоящее время этой фирмой выпускается наземный лазерный сканер Trimble GX
(рис. 9, г).
а |
б |
в |
г |
Рис. 9. НЛС фирмы Trimble: а – GS200; б – Soisic; в – S25; г – GX
Совместно с определением пространственных координат точек объекта сканеры GS100 и GS200 позволяют выполнять съемку цифровой видеокамерой, с помощью которой можно получать цифровые цветные снимки объектов сканирования. Видеокамера оснащена трансфокатором для автоматического изменения фокусного расстояния объектива. НЛС GS100 и GS200 имеют встроенное программное обеспечение [81, 117, 118].
Сканеры Mensi S10, S25 и Soisic разработаны специально для съемки объектов малых размеров и внутреннего оборудования помещений. Эти модели НЛС отличаются высокой точностью получения пространственных координат точек объекта (порядка 0,1 мм), так как в них реализован триангуляционный способ измерения расстояний. В данных приборах выполняются автоматическая фокусировка и настройка мощности лазерного излучения относительно возвращенного электромагнитного сигнала [151]. Эти модели сканеров также оснащены цифровыми камерами.
Австрийская фирма Riegl Laser выпускает сканеры Riegl серии LMS
(рис. 10).
а |
б |
в |
г |
д |
Рис. 10. НЛС фирмы Riegl: а – LMS-Z210; б – LMS-Z360; в – LMS-Z420i; г – LMS-Z390i; д – LMS-Z210ii

Лазерный сканер Riegl LMS-Z210, кроме пространственных координат точек объекта и информации об интенсивности отраженного сигнала, позволяет получать данные о реальном цвете точек за счет внедрения в приемопередающий тракт дальномера ПЗС-элемента. Приемник, принимающий информацию о реальном цвете, имеет очень высокую интегральную чувствительность, но за счет того, что сканирование производится с высокой скоростью (малое время экспозиции), получаемое изображение имеет низкую цветопередачу [112, 126].
Сканеры LMS-Z360, LMS-Z390 и LMS-Z420 конструктивно аналогичны LMS-Z210 [126–128]. Их отличие заключается в технических характеристиках. Особенностью этих моделей является возможность установки на сканирующую головку цифровых камер Nikon D100 или Canon EOS 1Ds [126, 127, 160].
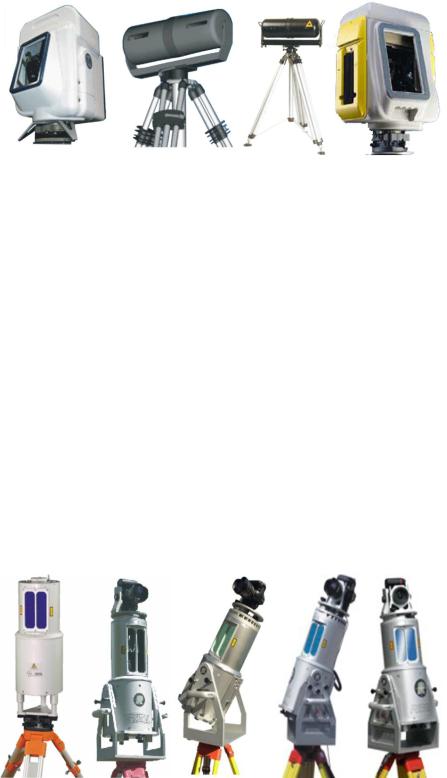
Производством и продажей НЛС занимается известная в геодезии фирма Leica. Под маркой этой фирмы на рынке можно встретить сканеры: HDS 2500, HDS 3000, HDS 4500, ScanStation, HDS 6000 и ScanStation 2 (рис. 11), хотя в настоящее время первые четыре модели не выпускаются.
а |
б |
в |
г |
д |
Рис. 11. НЛС фирмы Leica Geosystems: а – HDS 2500; б – HDS 3000; в – ScanStation 2; г – HDS 4500; д – HDS 6000
Наземный лазерный сканер ScanStation является конструктивным продолжением НЛС HDS 3000. Отличительными особенностями сканера ScanStation являются наличие двухосевого компенсатора углов наклона прибора, точность работы которого составляет 1″, и оснащение лазерным центриром, поэтому этот прибор можно ориентировать, как обычный электронный тахеометр. Кроме того, НЛС ScanStation имеет встроенную цифровую камеру.
В 2007 г. фирма Leica Geosystems начала выпускать лазерный сканер ScanStation 2, отличительной особенностью которого является значительно большая максимальная скорость сканирования и улучшенные другие технические характеристики (прил. 1). Кроме того, следует отметить, что в НЛС HDS 3000, ScanStation и ScanStation 2 лазерный луч имеет фокус на расстоянии примерно 25 м от сканера, как показано на рис. 12. Это означает, что на расстоянии примерно 50 м от сканера до объекта диаметр лазерного луча у перечисленных НЛС не увеличивается.