

Коршунов / КУРСРабMMO
.DOCЗАДАНИЕ на курсовую работу 10.09.13. Анализ этапов решения фотограмметрической задачи
разд.l . анализ качества проекта задачи на решение
разд.11 анализ этапов решения задачи по м.н.к.
разд.-111 анализ влияния погрешностей измерения
разд.-1У анализ достоверности ОЦЕНОК решения
разд.-У анализ влияния топологии проекта
Указания: 1) везде сохраняете четыре значащих цифры. Стоящие перед ними и за ними нули, единицы или девятки в число этих четырех не входят. Примеры: 0.00000000002345, 1.2345, 23450000000000.0, 23.45; 10000; 11111;
2) количество разрядов сохраняете, даже если это нули: 1.0000+0.0000000002345=1.0000; здесь "2345" далеко за четырьмя значащими цифрами (нулями), которые Вы удерживаете;
3) соблюдайте указанное расположение элементов вектора параметров;
4) в записях значений величин сохраняйте один младший разряд после верных цифр: в СКО - это 2 цифры ( без предыдущих 0, 1 или 9), в координатах - согласно их СКО
1. АНАЛИЗ КАЧЕСТВА СИСТЕМ УРАВНЕНИЙ ПОПРАВОК и НОРМАЛЬНЫХ [
1.1
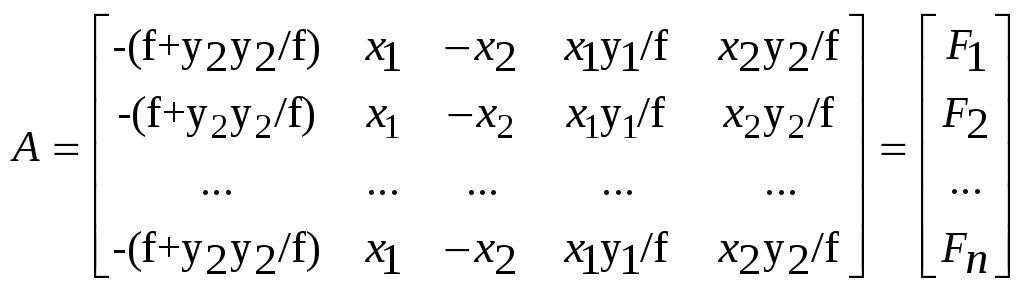
Составьте уравнения поправок
![]() для 6 стандартных точек. Здесь
Tт
=[2
1
2
1
2
] - вектор
искомых параметров,
Vт
=[v1
v2
...vn
]- вектор
поправок vi
к измеренным значениям
qi
, где
для 6 стандартных точек. Здесь
Tт
=[2
1
2
1
2
] - вектор
искомых параметров,
Vт
=[v1
v2
...vn
]- вектор
поправок vi
к измеренным значениям
qi
, где
![]() , x,y -
фотограмметрические координаты точек
на левом (1)
и правом (2)
снимках; LT
=[l1
l2
...ln
] - вектор
свободных членов уравнений поправок,
где li
=qi
. векторы-строки
(градиенты) образуют матрицу коэффициентов
уравнений
поправок:
, x,y -
фотограмметрические координаты точек
на левом (1)
и правом (2)
снимках; LT
=[l1
l2
...ln
] - вектор
свободных членов уравнений поправок,
где li
=qi
. векторы-строки
(градиенты) образуют матрицу коэффициентов
уравнений
поправок:
 .
.
1.2 Продифференцировав А, определите абсолютные ошибки коэффициентов мтр. dA, полагая, что значение p=b верно до 0.1 мм, а ошибка dy2 =q.
1.3
Вычислите коэффициенты
системы нормальных уравнений
![]() для
6 стандартных
точек, полагая матрицу весов единичной
P=E.
для
6 стандартных
точек, полагая матрицу весов единичной
P=E.
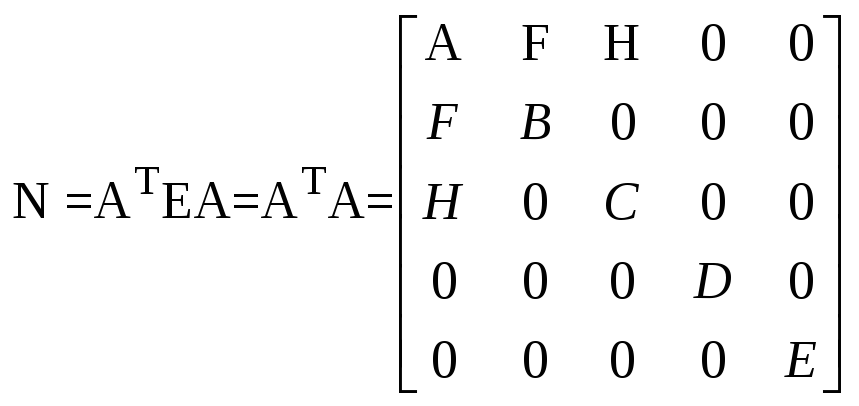 ; числа
A,B,C,D,F,H
суть
элементы
матрицы N.
Вычислите также свободные члены системы
(ATEL)=AT
L.
; числа
A,B,C,D,F,H
суть
элементы
матрицы N.
Вычислите также свободные члены системы
(ATEL)=AT
L.
1.4 Определите абсолютную погрешность dN элементов матрицы N путем дифференцирования ее коэффициентов nij. Например, a=x2 => da=2x dx. Или же dN = d(AT A)= dAT A. По ним найти относительные ошибки этих коэффициентов dnij / nij (для ni=0 не искать, считать =0)
1.5
Найти собственные числа матрицы N, т.е.
найти пять корней i
векового уравнения
![]() .
Контроль:
подстановка корней в исходное уравнение
и в инварианты ортогонального
преобразования дает тождество. Подсчитать
след N , след
и ||||
и сравнить их. Указать норму матрицы
||N|| и ее влияние на решение. Сравнить
со следом. Вывод об использовании следа
для оценки системы уравнений.
.
Контроль:
подстановка корней в исходное уравнение
и в инварианты ортогонального
преобразования дает тождество. Подсчитать
след N , след
и ||||
и сравнить их. Указать норму матрицы
||N|| и ее влияние на решение. Сравнить
со следом. Вывод об использовании следа
для оценки системы уравнений.
1.6 Найти числа обусловленности мтр N cond(N)=H= max : min и мтр A cond(A)= H0.5 . Рассчитать по относит. ошибкам коэффициентов (dnj / nj) относительные ошибки определения поправок к начальным значениям параметров (dT/T); Ск. д.б. верных цифр в коэффициентах УП и НУ, чтобы получить поправку с двумя верными цифрами? Во ск. раз возросли свобод члены норм уравнений AT PL в сравнении с уравн. поправок.
1.7
Найти параметры T из системы уравнений
поправок. Из равенств «3» и «5» находим
2:
![]()
![]() .
Из
.
Из
![]() .
Из
.
Из![]() .
.
Учитывая,
что
![]() ,
подсчитайте по найденным значениям
углов составляющие q
по параметрам ω2
κ2
α2,
а также ошибки составляющих по их
относительным ошибкам (например
,
подсчитайте по найденным значениям
углов составляющие q
по параметрам ω2
κ2
α2,
а также ошибки составляющих по их
относительным ошибкам (например
![]()
![]() ).
Выводы: какие углы, на каких точках
оказывают наибольшее влияние на q;
значения каких углов определяются
плохо.
).
Выводы: какие углы, на каких точках
оказывают наибольшее влияние на q;
значения каких углов определяются
плохо.
П. АНАЛИЗ ЭТАПОВ решения задачи по м. н. к.
П.1
Обратите матрицу N
и вычислите
псевдообратную матрицу
![]() .
Линейный
оператор
.
Линейный
оператор
![]() преобразует вектор
х
параллаксов L в вектор параметров Т.
Контроль:
преобразует вектор
х
параллаксов L в вектор параметров Т.
Контроль:
![]() и частная симметрия коэффициентов.
и частная симметрия коэффициентов.
П.2
По матрице
![]() распишите влияние q каждой точки на
параметры. Начальные
значения параметров – нули, поэтому
поправки
распишите влияние q каждой точки на
параметры. Начальные
значения параметров – нули, поэтому
поправки![]() суть значения параметров. Контроль:
суть значения параметров. Контроль:
![]() .
Сравнив с Т
из п. 1.8, дайте вывод о пользе уравнивания
при стандартном расположении точек.
.
Сравнив с Т
из п. 1.8, дайте вывод о пользе уравнивания
при стандартном расположении точек.
П.3
Идемпотентная матрица
![]() выделяет из
вектора поперечных параллаксов L
вектор согласующих поправок V
к измеренным q.
Вычислите U.
Контроль:
суммы элементов
строк (столбцов) U равны нулю. (Матрица
выделяет из
вектора поперечных параллаксов L
вектор согласующих поправок V
к измеренным q.
Вычислите U.
Контроль:
суммы элементов
строк (столбцов) U равны нулю. (Матрица
![]() нужна и в п.12.)
нужна и в п.12.)
П.4 Вынести из U общий множитель 1/2n и округлить элементы uij до целых.
П.5
Найти вектор поправок V измеренных
величин:
![]()
П.6
Найти корреляционную матрицу Rp
вектора параметров
![]() ,
где Q ij
элементы
матрицы N-1.
Указать
силу коррелированности каждой пары
параметров.
,
где Q ij
элементы
матрицы N-1.
Указать
силу коррелированности каждой пары
параметров.
П.7
Найти частные коэффициенты корреляции
![]() ,
где M ij
- минор
элемента r ij
корреляционной
матрицы Rp,
Mii
- i-ой единицы , а Mjj
- j-ой единицы
главной диагонали этой матрицы.
Проще вычислять по матрице N:
,
где M ij
- минор
элемента r ij
корреляционной
матрицы Rp,
Mii
- i-ой единицы , а Mjj
- j-ой единицы
главной диагонали этой матрицы.
Проще вычислять по матрице N:
![]() ,
ибо N
ij=
M
ij*Det(N
)
,
ибо N
ij=
M
ij*Det(N
)
П.8 Найти коэффициент множественной корреляции параметра (ЭвЗО) r y,X =(1-D/My )0.5, где My -минор параметра y; D- определитель корреляционной матрицы Rp. Сравнить значения этих трех коэффициентов и сделать вывод о наличии ложной корреляции.
П.9
Найти оценку дисперсии единицы веса:
![]() и ее СКО .
и ее СКО .
П.10
Найти ковариационную матрицу вектора
параметров
![]() ;
выписать
оценки дисперсии и среднего квадратического
отклонения
(СКО). Указать размерность СКО. Дать СКО
в градусной мере.
;
выписать
оценки дисперсии и среднего квадратического
отклонения
(СКО). Указать размерность СКО. Дать СКО
в градусной мере.
П.11
Найти ковариационную матрицу
![]() вектора
уравненных значений измер. величин
вектора
уравненных значений измер. величин
QT
=[q1
q2
...qn].
![]() вычислена в п.3.
Выписать СКО для всех точек с указанием
ед. измерения.
вычислена в п.3.
Выписать СКО для всех точек с указанием
ед. измерения.
П.12
Найти корреляционную матрицу Rq
вектора уравненных значений измер.
величин
![]() ,
где K ij
элементы матрицы Kq.
Указать силу корреляции
,
где K ij
элементы матрицы Kq.
Указать силу корреляции
Ш. АНАЛИЗ ВЛИЯНИЯ ОШИБОК ИЗМЕРЕНИЙ на ПАРАМЕТРЫ, ПОПРАВКИ, ФУНКЦИИ
Ш.1 Грубая ошибка измерения q. Прибавить к измеренному значению qi одной из точек грубую ошибку dqi (более 5 СКО). Найти (как в п.6) вектор поправок V, отягощенный грубой ошибкой, и вектор параметров. Вывод: можно ли выявить ошибочную точку по результатам уравнивания при одном избыточном измерении. На какие параметры онам повлияет.
Ш.2 Ошибки определения места нуля (МОу), координат главной точки (уо), расстояния между координатными метками. Прибавьте к исходному вектору измеренных величин Q вектор равных значений dQ (ошибку наблюдения координатн. меток или заданных их координат (расстояний)). Вычислите новые векторы поправок V и параметров T. Вывод о влиянии систематической ошибки на поправки и на каждый из параметров.
Ш.3 Ошибка фокусн.расст. f. Прибавьте к f ошибку df= 10мм. Вычислите новые A,N,T и V. Вывод о влиянии ошибки df на поправки V и на каждый из параметров Т.
Ш.4
Влияние ошибки взаимного ориентирования
![]() на
трансформированный
продольный параллакс-
точки
на
трансформированный
продольный параллакс-
точки
![]() ,
если р измерен
с ошибкой
,
если р измерен
с ошибкой
![]() ,
и на ее
высоту
,
и на ее
высоту
![]() при
при![]() Из
Из
![]() получаем
получаем
![]() ,
где
,
где
![]() и
дисперсия
функции
и
дисперсия
функции
![]() .
.
![]() .
Вывод
о качестве взаимн. ориентирования.
.
Вывод
о качестве взаимн. ориентирования.
Ш.5
Оцените невязку неявной функции вектора
Q:
![]() с учетом
корреляции
с учетом
корреляции
![]() и без учета
корреляции
и без учета
корреляции
![]() .
Градиент
.
Градиент![]() .
Объясните расхождение.
.
Объясните расхождение.
Ш.6 Нарисуйте схему цифрового м.н.к. фильтра случайных ошибок измерений и схему линейного оператора взаимного ориентирования: входной сигнал - вектор измеренных значений Q; выходной сигнал - вектор параметров T; корригирующий сигнал - вектор поправок V измеренных значений. Какая матрица (оператор) отфильтровывает (выделяет) помехи какого типа (ошибки измерений)?
1У. АНАЛИЗ НАДЕЖНОСТИ (достоверности) полученных ОЦЕНОК СКО
1У.1 Найти доверительный интервал и показать его графически, применяя распределение 2 при доверительной вероятности β=0.68 для всех оценок рассеяния: ( a) дисперсии единицы веса 2 , а по ее интервалу и (б) СКО ЭвЗО, явной F и неявной Ф функции из п.п. 3, 4. Вывод о надежности оценок. Отношение r/n как качество оценок.
Изложить суждение о доверительном интервале для найденных оценок ЭВзО на основе распределения Стьюдента при числе степеней свободы r =n - k.
У АНАЛИЗ ВЛИЯНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ И КОЛИЧЕСТВА ТОЧЕК
У.1 Оценить влияние нестандартного расположения точек 7 и 8 на невязки (поправки). Дополните систему из 6 УП новыми уравнениями для точек 7 и 8, расположенных произвольно. Найдите новую обратную матрицу NF -1 для 8 точек. Затем - матрицу UF =E-AF NF -1 AFT, согласно 11, п.4, где AF содержит восемь градиентов. Контроль правильности След (UF )=n-k. Найти новый вектор поправок измеренных величин VF =UF LF , где вектор свободных членов L содержит элемент qF на точках7 и 8, отягощенный грубой ошибкой (ибо Вы не знаете q на этих точках). Пояснить влияние тчк 7 и 8 на поправки на остальных точках. На какой точке ошибки q наименее влияют на поправки, на какие углы они повлияют. Как это связано с положением тчк на с/паре. Вывод о возможности верной отбраковки одной ошибочной точки из 8. Сделайте рисунок стандартных и 7й и 8й точек и выпишите на точках значения главной диагонали из U.
(Можно
применить рекуррентную формулу обращения
матрицы при добавлении новой строки в
систему уравнений поправок:
![]() ,
где N -1
- обратная матрица, полученная Вами для
6 тчк, GT
G - матрица,
,
где N -1
- обратная матрица, полученная Вами для
6 тчк, GT
G - матрица,
![]() -
вектор -строка,
-
вектор -строка,
![]() - число.) сразу дать 7 – 12 точек стандарт
и без ст. нужна программа для макетов
- число.) сразу дать 7 – 12 точек стандарт
и без ст. нужна программа для макетов
Задание выдал Коршунов Р.А. "09 " сентября 2013 г.
модернизация 91--13