

Физика / Теоритическая механика в задачах и примерах
.pdfФедеральное агентство по образованию Федеральное государственное образовательное учреждение
высшего профессионального образования
Сибирский федеральный университет
Т. А. Валькова Н. В. Еркаев К. А. Редкоус А. Е. Митяев О. И. Рабецкая А. К. Савицкий
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА В ПРИМЕРАХ И ЗАДАЧАХ
Утверждено Редакционно-издательским советом В качестве учебного пособия
Под общей редакцией Т. А. Вальковой
Красноярск 2007
УДК 531(07)
В
В Теоретическая механика в примерах и задачах: Учеб. пособие / Т. А. Валькова, Н. В. Еркаев, К. А. Редкоус, А. Е. Митяев, О. И. Рабецкая, А. К. Савицкий; Под общ. ред. Т. А. Вальковой. − Красноярск:
ИПЦ ПИ СФУ, 2007. − 184 с. ISBN
Приведены порядок и примеры решения типовых задач по теоретической механике.
Предназначены для студентов укрупненных групп направлений подготовки бакалавров 150400.62 Технологические машины и оборудование, 150600.62 Материаловедение и технология новых материалов, 150900.62 Технология, оборудование и автоматизация машиностроительных производств, 190100.62 Наземные транспортные системы, 190500.62 Эксплуатация транспортных средств.
|
УДК 531(07) |
ISBN |
© СФУ, 2007 |
|
© Валькова Т. А., Еркаев Н. В., |
|
Редкоус К. А., Митяев А. Е., |
|
Рабецкая О. И., Савицкий А. К. |
|
2007 |
Технический редактор
Гигиенический сертификат № 24.49.04.953.П.000338.05.01 от 25.05.2001.
Подп. в печать |
Формат 60 84/16. Бумагатип. №1. Офсетнаяпечать. |
||
Усл. печ. л. |
. Уч.-изд. л. . Тираж |
экз. Заказ |
С |
Отпечатано в ИПЦ КГТУ 660074, Красноярск, ул. Киренского, 28
ОГЛАВЛЕНИЕ
Введение |
5 |
|
Модуль 1. Кинематика |
6 |
|
1. |
Тема 1. Кинематика точки |
6 |
|
1.1. Задачи по кинематике точки |
6 |
2. |
Тема 2.. Поступательное и вращательное движение тела |
12 |
|
2.1. Кинематика вращательного движения тела |
12 |
3. |
Тема 3. Плоскопараллельное (плоское) движение твердого тела |
16 |
|
3.1. Задачи на плоское движения твердого тела |
16 |
4. |
Тема 4. Движение тела вокруг неподвижной точки |
30 |
|
4.1. Кинематика сферического движения твердого тела |
30 |
5. |
Тема 5. Сложное (составное) движение точки и тела |
34 |
|
5.1. Задачи на сложное движение точки |
34 |
|
5.2. Сложение вращений твердого тела вокруг |
|
|
пересекающихся осей |
43 |
|
5.3. Сложение вращений твердого тела вокруг |
|
|
параллельных осей |
46 |
Модуль 2. Статика |
50 |
|
6. |
Тема 8. Система сходящихся сил |
50 |
|
6.1. Равновесие твердого тела при действии |
|
|
плоской системы сходящихся сил |
50 |
|
6.2. Равновесие твердого тела при действии |
|
|
пространственной системы сходящихся сил |
55 |
7. |
Тема 9. Момент силы относительно центра. Пара сил |
61 |
|
7.1. Алгебраические моменты сил и пар сил |
61 |
8. |
Тема 10. Плоская произвольная система сил |
64 |
|
8.1. Равновесие твердого тела при действии плоской системы сил |
64 |
|
8.2. Равновесие системы твердых тел при действии |
|
|
плоской системы сил |
67 |
|
8.3. Равновесие твердого тела при наличии сил сцепления |
71 |
|
8.4 Равновесие твердого тела при наличии трения качения |
75 |
9. |
Тема 11. Пространственная произвольная система сил |
79 |
|
9.1. Равновесие твердого тела при действии |
|
|
произвольной пространственной системы сил |
79 |
10. Тема 12. Центр параллельных сил. Центр тяжести |
87 |
|
|
10.1 Определение координат центров тяжести однородных тел |
88 |
Модуль 3. Динамика |
94 |
|
11.Тема 13. Динамика материальной точки |
94 |
|
|
11.1. Две задачи динамики точки |
94 |
12. |
Тема 14. Прямолинейные колебания точки |
101 |
|
12.1 Задачи на прямолинейные колебания точки |
101 |
13. |
Тема 15. Динамика относительного движения точки |
113 |
|
13.1 Задачи динамики относительного движения точки |
113 |
14. |
Тема 17. Общие теоремы динамики |
116 |
|
14.1. Теорема о движении центра масс механической системы |
116 |
|
14.2. Теоремы об изменении количества движения |
120 |
|
14.3. Теорема об изменении кинетического момента системы |
124 |
15. |
Тема 18. Теоремы об изменении кинетической энергии |
128 |
|
15.1 Задачи на применение теорем об изменении |
|
|
кинетической энергии |
128 |
|
16. Тема 19. Динамика твердого тела |
135 |
|
16.1. Динамика вращательного движения твердого тела |
135 |
|
16.2. Динамика плоскопараллельного движения твердого тела |
138 |
17. |
Тема 20. Принцип Даламбера |
141 |
|
17.1. Решение задач с помощью принципа Даламбера |
141 |
18. |
Тема 21. Принципы аналитической механики |
144 |
|
18.1. Принцип возможных перемещений |
144 |
|
18.2. Общее уравнение динамики |
148 |
19. |
Тема 23. Уравнения Лагранжа второго рода |
155 |
|
19.1. Решение задач с помощью уравнений Лагранжа второго рода |
155 |
20. |
Тема 24. Малые свободные колебания механической системы |
161 |
|
20.1. Малые колебания системы с одной степенью свободы |
161 |
|
20 2. Малые колебания системы с двумя степенями свободы |
171 |
21. |
Тема 26. Элементарная теория удара |
181 |
|
21.1. Задачи по теории удара |
181 |
Библиографический список |
184 |
|
ВВЕДЕНИЕ
Механика наука о равновесии и движении материальных тел. Её законы широко используются в машиностроении, приборостроении, на транспорте, в энергетике и т. д. Теоретическая механика служит научным фундаментом для многих технических дисциплин. Ее методы и приемы используются при всех технических расчетах, связанных с проектированием различных сооружений, машин и их эксплуатацией.
Содержание дисциплины «Теоретическая механика» определяется рабочей программой, составленной на основании ГОСов II поколения по направлениям: 150400.62 Технологические машины и оборудование, 150600.62 Материаловедение и технология новых материалов, 150900.62 Технология, оборудование и автоматизация машиностроительных производств, 190100.62 Наземные транспортные системы, 190500.62 Эксплуатация транспортных средств.-
Теоретическая механика, являясь одной из первых естественнонаучных дисциплин, которую изучают студенты в процессе обучения, занимает важное место в общетехнической подготовке бакалавров. Её преподавание преследует двоякую цель: во-первых, способствовать формированию у студентов диалектико-материалистического мировоззрения, развивать их логическое мышление и вводить в понимание весьма широкого круга явлений, относящихся к одной из форм движения материи к механическому движению; во-вторых, обеспечить овладение бакалаврами научной базой современной техники.
Однако для хорошего усвоения курса теоретической механики нужно не только глубоко изучить её основные теоретические положения, но и научиться применять их на практике. Это возможно при серьезной работе студентов над решениями задач на практических занятиях.
Данное учебное содержит методику решения типовых задач по теоретической механике, которая затем иллюстрируется на конкретных примерах. Рассмотренные задачи охватывают материал всех модулей курса теоретической механики и всех тем практических занятий в соответствие с рабочей программой. Большинство разобранных в пособии задач взято из книги: Сборник задач по теоретической механике / И. В. Мещерский СПб.: Изд-во «Лань», 1998. 448 с., которая относится к основной литературе в соответствии с требованиями ФГОС ВПО. В конце каждой темы пособия приведены номера задач этого сборника, рекомендованные при проведении практического занятия по этой теме.
Настоящее учебное пособие предназначено в помощь студентам для развития у них навыков решения задач. Оно также может оказаться полезным для молодых преподавателей, не имеющих методического опыта преподавания этой дисциплины.
МОДУЛЬ 1. КИНЕМАТИКА

1. ТЕМА 1. КИНЕМАТИКА ТОЧКИ
На практических занятиях по теме «Кинематика точки» проводится решение задач по определению скоростей и ускорений точки при координатном и естественном способах задания движения точки, а также задачи на равнопеременное криволинейное движение точки.
1.1. Задачи по кинематике точки
I. При решении задач по определению скорости и ускорения точки и радиуса кривизны её траектории в заданный момент времени при координатном способе задания движения рекомендуется придерживаться следующего порядка:
1) по уравнениям движения точки определить её траекторию посредством исключения из них параметра времени t и установления зависимости между декартовыми координатами точки;
2) изобразить точку на траектории в заданный момент времени; 3) по уравнениям движения точки вычислить проекции скорости на оси
координат и определить скорость точки по величине и направлению; 4) по проекциям скорости точки на декартовые оси найти проекции
ускорения точки на эти оси, затем определить модуль и направления вектора ускорения точки;
5) вычислить значения касательного и нормального ускорений точки и
радиус кривизны траектории по формулам: |
a |
τ |
V |
a |
x |
V |
y |
a |
y |
V |
z |
a |
z |
/V , |
|
|
x |
|
|
|
|
|
|
||||||
an a2 aτ2 , ρ V 2 / an . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II. Если движение точки задано естественным способом, то для определения её скорости и ускорения целесообразна следующая последовательность действий:
1) найти положение точки на траектории в заданный момент времени; 2) вычислить значение скорости точки дифференцированием заданного
уравнения движения по времени и изобразить вектор скорости V s&rτ по касательной к траектории в соответствии со знаком s&;
3) определить проекции ускорения точки на оси естественного
трехгранника и величину её полного ускорения: aτ V& &s , |
an V 2 /ρ; |
|
a |
an2 aτ2 . |
|
|
Пример 1.1. Движение точки М задано уравнениями: x 2t; |
y t2 , |
где х и у в метрах, t в секундах. Найти уравнение траектории, скорость и ускорение точки в момент времени t = 1 c.
Решение. Движение точки, заданное координатным способом, происходит в плоскости Оху. Для определения уравнения траектории выразим время t из уравнения движения вдоль оси х:
t 2x 0 ,
и подставив в уравнение движения по оси у, получим
y |
x2 |
. |
(1.1) |
|
4 |
||||
|
|
|
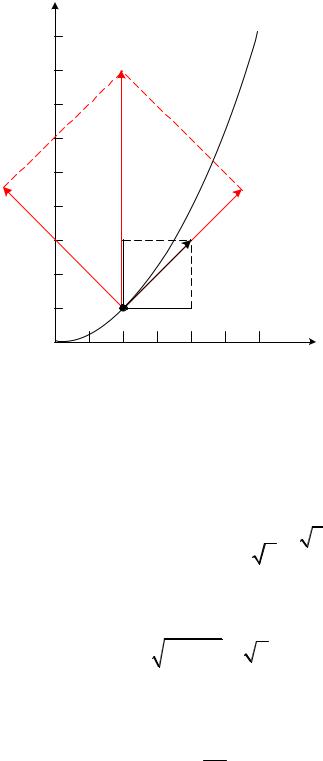
Следовательно, траекторией точки является ветвь параболы (1.1) при x 0 . В момент времени t = 1 с точка находится в положении М(2,1) (рис. 1.1).
Вычислим проекции скорости и ускорения точки на декартовые оси при t = 1 с:
Vx x& 2 м/c; |
Vy y& 2t |
|
t 1 2 м/c; |
|
|||
|
|||
ax &x 0 м/c2; |
ay &y 2 м/c2 . |
||
Тогда в декартовой системе координат векторы скорости и ускорения точки равны:
V1 2i 2 j; |
r |
2 j . |
a1 |
Найдем их модули:
V1 Vx2 Vy 2 2 2 м/c ; |
a1 ax2 ay 2 2 м/c2 . |
Определим направления векторов V1
cos |
V |
|
|
|
|
|
Vx |
|
2 |
; |
|||||||
i |
|
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
1 |
|
|
|
|
|
V1 |
|
|
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
r |
|
|
|
|
|
a |
x |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
cos |
|
a |
|
|
i |
|
|
|
|
|
|
0; |
|||||
|
|
|
|
|
|
||||||||||||
|
|
1 |
|
|
|
|
|
a1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
и a1 по формулам:
|
|
|
r |
r |
|
|
|
Vy |
|
|
2 |
|
||||
cos |
|
V |
j |
|
|
|
|
|
|
|
; |
|||||
|
|
|
|
|||||||||||||
|
|
1 |
|
|
|
V1 |
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
r |
r |
|
|
|
ay |
|
|
|
|
|||||
cos |
|
a |
j |
|
|
|
|
|
1. |
|
||||||
|
|
|
|
|||||||||||||
|
|
|
1 |
|
|
|
a1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Следовательно, вектор скорости V1 образует с осями Ох и Oу углы, равные 45о, а вектор ускорения a1 точки М направлен вдоль оси Oу (рис. 1.1).
|
y |
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
7 |
|
a1 |
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
aτ |
|
|
an |
|
|
|
|
Масштабы: |
|
||
|
3 |
|
|
|
|
|||
|
|
Vy |
|
для координат в 1 см _ 1 м |
||||
|
|
|
|
V1 |
|
|||
|
2 |
|
|
Vx |
|
|
для скорости в 1 см |
_ 0,5 м/c |
|
1 |
|
|
|
|
для ускорения в 1 см _ 0,25 м/c2 |
||
|
|
M(2,1) |
|
|
x |
|
||
|
|
|
|
|
|
|||
|
O |
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
|
|
|
||||||
Рис. 1.1
Поскольку точка М движется по кривой (1.1), то вектор её ускорения a1 разложим на касательное ускорение и нормальное ускорение. Определим касательное ускорение точки в момент времени t 1 c:
aτ |
Vx ax Vy ay |
|
|
0 4 |
|
2 1,41 м/c |
2 |
. |
|
||||||||
V |
|
2 2 |
|
|||||
|
|
t 1 |
|
|
|
|
||
|
|
|
|
|
|
Вычислим нормальное ускорение точки в этот момент времени
an |
a2 aτ2 |
|
2 1,41 м/c2 . |
Тогда в данном положении точки радиус кривизны траектории равен
ρ V12 5,64 м. an
На рис. 1.1 показаны: траектория точки М, в момент времени t 1 c её положение на траектории, вектор скорости V1 и его проекции на декартовые
оси, вектор ускорения a1 и его составляющиеaτ и an .
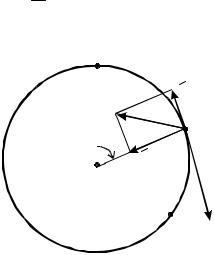
Пример 1.2. Точка М движется по окружности радиуса R = 60 см по
|
|
πR 3t t2 |
, где s в см, t в с (рис. 1.2). |
закону |
s OM |
||
|
|
6 |
|
Определить скорость и ускорение точки в момент времени t = 1 с. Решение. Движение точки задано естественным способом. Найдем
положение точки М1 на окружности при t = 1 с:
s1 OM1 |
πR 3 12 |
πR |
см. |
|
|
6 |
|
3 |
|
Вычислим центральный угол |
OCM1 , |
стягивающий дугу ОМ1, |
||
( Rs π3 60o ), и изобразим точку М1 в этом положении на рис. 1.2.
_ О + |
Определим численное значение |
скорости точки: |
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
d πR |
|
|
|
|
|
πR |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
R |
a1 |
М1 |
|
|
V |
dt |
|
|
|
|
|
6 |
3t t |
|
|
|
6 |
|
3 2t , |
||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
о |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
||||||||
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С |
|
|
n |
|
|
|
при t = 1 с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
V |
1 |
|
V |
|
πR |
31,4 |
см/c 0 |
. |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
6 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Рис. 1.2 |
|
|
|
Вектор |
V1 |
|
|
направим |
по |
касательной к |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
окружности в точке М1 в направлении положительного отсчета s (см. рис. 1.2).
Для определения ускорения точки вычислим численные значения её нормального и касательного ускорений:
|
|
|
|
|
an |
V 2 |
16,4 см/c |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
1 |
|
; |
|
|
|
||||||
|
|
|
|
|
R |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dV |
|
d |
|
πR |
|
|
|
|
|
πR |
|
|
|
|
2 |
|
aτ |
dt |
|
|
|
6 |
3 |
2t |
|
3 |
62,8 |
см/c |
|
0. |
||||
|
|
||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||||
На рис. 1.2 вектор нормального ускорения an направим из точки М1 по радиусу к центру С окружности, а вектор касательного ускорения по касательной к окружности противоположно вектору скорости V1 , так как в данный момент времени точка движется замедленно V1 0, aτ 0 .
Определим величину полного ускорения точки М1 по формуле:
a1 |
aτ2 an2 |
62,8 2 10,42 64,9 см/c2 . |
Вектор полного ускорения |
a1 направлен по диагонали прямоугольника, |
|
построенного на векторах an |
и aτ как на сторонах (рис. 1.2). |
|
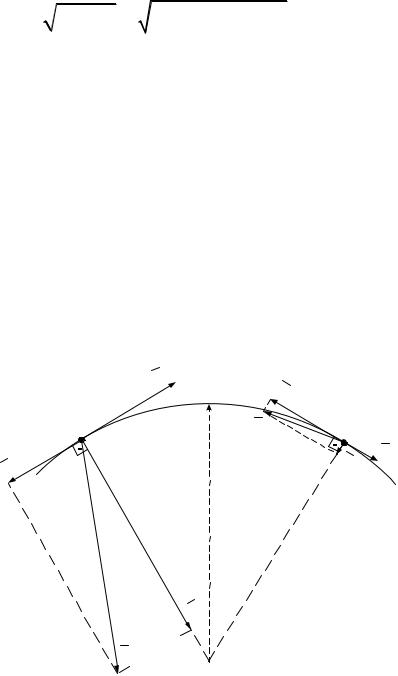
Пример 1.3. Поезд движется равнозамедленно по дуге окружности радиуса R и проходит путь s, имея начальную скорость V0 и конечную V1 .
Определить полное ускорение a поезда в начале и в конце пути, а также время движения t1 по дуге.
Решить задачу при следующих данных:
R = 800 м, s = 800 м, V0 = 15 м/c, V1 = 5 м/c.
Решение. Примем поезд за материальную точку М и изобразим ее на дуге окружности радиусом R в начальный момент времени t 0 точка M 0
и в момент t1 точка M1 (рис. 1.3), причем длина дуги M 0M1 s 800 м .
a
|
V |
|
a |
|
0 |
|
|
|
|
|
|
|
|
|
|
М0 |
R |
a1 |
М1 |
|
|
|
an |
|
|
|
1 |
n a0
a0 


С
Рис. 1.3
V
1
Поскольку поезд движется по криволинейной траектории, то согласно теореме Гюйгенса его полное ускорение определяется по формуле:
a aτ an .
Вычислим нормальное ускорение поезда в начале и конце дугиM 0M1 , получим: