

Оптимальный синтез ЭМС
Сущность оптимального синтеза ЭМС заключается в организации в ней подчинённого регулирования путём настройки каждого из её контуров на технический или симметричный оптимум.
•В системах стабилизации скорости вращения двигателя каждый из контуров настраивается на технический оптимум. При этом эквивалентная
постоянная времени Tμ для контура регулирования момента рассчитывается по формуле:
где tпп – заданное время переходного процесса
n – количество контуров регулирования

При n =2 некомпенсированная постоянная времени
•В системах слежения за перемещением внутренний контур (регулирования момента или скорости) настраивается на технический оптимум, а внешний контур (слежения за перемещением) – на симметричный оптимум. Это необходимо для придания астатизма внешнему контуру.
Эквивалентная постоянная времени Tμ для внутреннего контура рассчитывается по формуле:
при n =2
Порядок синтеза ЭМС
•по приведённым выше формулам рассчитывается эквивалентная некомпенсируемая постоянная времени Tμ ;
•во внутренний контур вводится корректирующее устройство, записывается передаточная функция разомкнутой цепи скорректированной САУ и приравнивается к передаточной функции ТО;
•из полученного уравнения определяется передаточная функция корректирующего устройства, регулятора и фильтра, если таковой необходим;
•полученное корректирующее устройство вводится в
корректируемый контур и выводятся передаточные функции скорректированного контура;
•по полученным передаточным функциям рассчитываются ЛАЧХ, ЛФЧХ, переходная характеристика по задающему воздействию, рассчитываются показатели качества регулирования и сравниваются с ожидаемыми;
•внутренний контур заменяется инерционным или инерционным форсирующм звеном и, в соответствии с приведенной последовательностью, проводится синтез внешнего контура.
Замечания:
•Если Tμ > Tом или Tос, внутренний контур всегда
можно точно настроить на ТО. При Tμ = Tом или Tос за счёт форсирующего действия инерционной обратной связи перерегулирование в контуре превысит 5%, что приведёт к увеличению времени переходного процесса.
•Для внешнего контура точной настройки на ТО или СО не удается осуществить никогда. Это обусловлено главным допущением, сделанным при синтезе корректирующих устройств – приближенным представлением внутреннего контура, представляющим колебательное звено, инерционным звеном, то есть искусственным понижением его порядка.
•При синтезе внешнего контура корректирующее звено, как правило, представляет собой последовательное соединение типового регулятора
(ПИ, ПИД и т.д.) и двухзвенного фильтра. Поскольку, как правило, в фильтре присутствуют большая и малая постоянные времени, их произведение полагается равным нулю и двухзвенный фильтр заменяется однозвенным. Такая замена также приводит к увеличению порядка контура и его настройка ещё больше отличается от идеальной.
Пример синтеза ЭМС
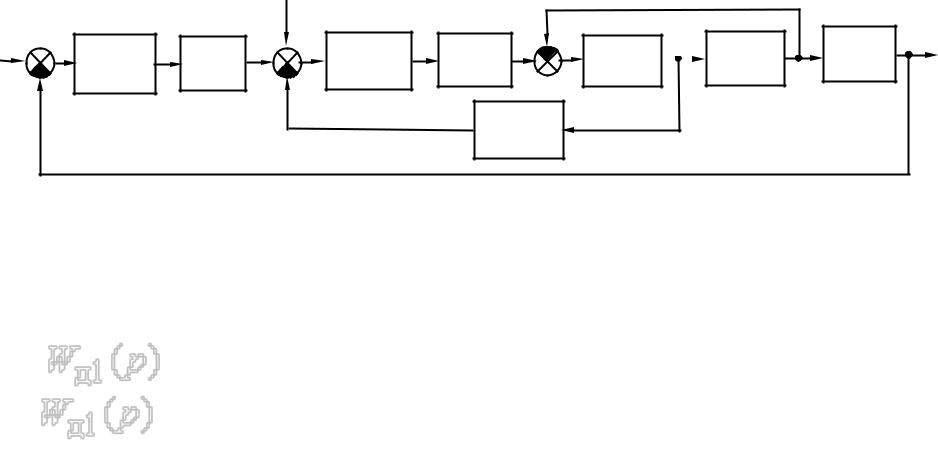
Пусть задана структура
Lвх |
U |
|
|
Lвых |
зм |
|
M Wд2 |
|
|
|
|
|
||
Wрп Kδ |
Wрм Wп |
Wд1 |
Wм |
|
|
Wом |
|
|
|
Вынесем из контура регулирования момента сумматор, к которому подводится единичная обратная связь,
охватывающая звенья с передаточными функциями и  , перенеся его вправо через звено
, перенеся его вправо через звено
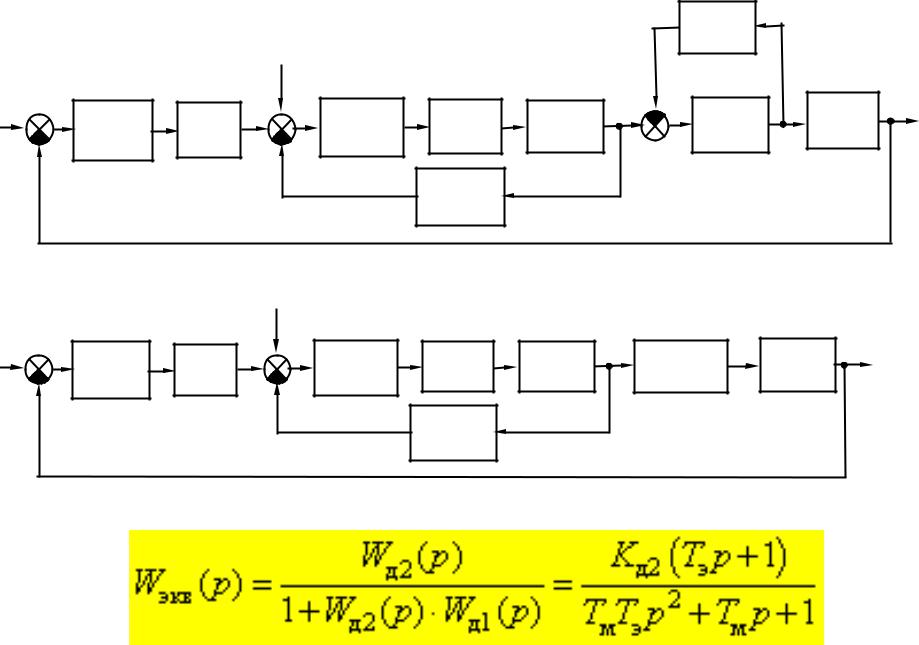
. В соответствии с правилами преобразования структурных схем получим структуру
Lвх |
|
Uзм |
|
M |
Wд1 |
Lвых |
|
|
|
||||
|
|
|
Wд2 |
Wм |
||
Wрп |
Kδ |
Wрм |
Wп |
Wд1 |
||
|
|
|
Wом |
|
|
|
или |
|
Uзм |
|
M |
|
|
Lвх |
|
|
|
L |
||
|
|
|
|
|
|
вых |
Wрп |
Kδ |
Wрм |
Wп |
Wд1 |
Wэкв |
Wм |
|
|
|
Wом |
|
|
|
где
Получившееся эквивалентное звено содержит последовательно соединенные форсирующее звено и
звено второго порядка.
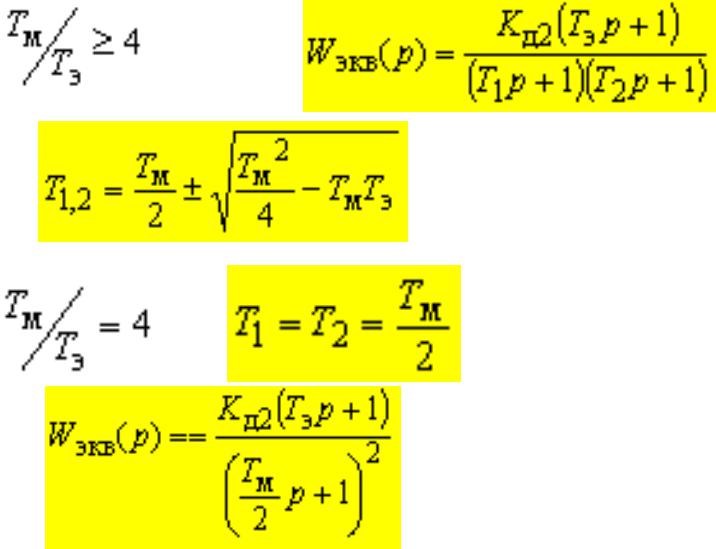
• Если |
, то |
где |
|
• При

Пусть
Произведём настройку контура регулирования момента на технический оптимум, а контура слежения за перемещением – на симметричный оптимум. Тогда расчётное значение эквивалентной некомпенсируемой постоянной времени
Т.к. |
, то принимаем |